 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
DF-SSmVEP: Dual Frequency Aggregated Steady-State Motion Visual Evoked Potential Design with Bifold Canonical Correlation Analysis
Jan 02, 2022
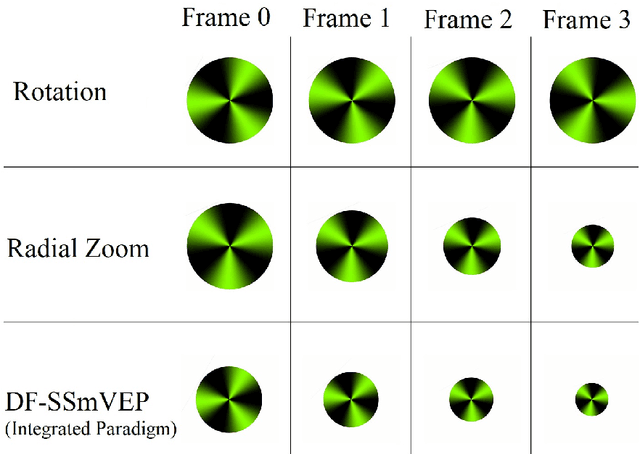
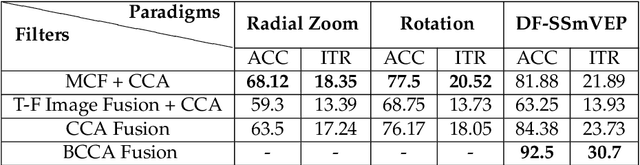
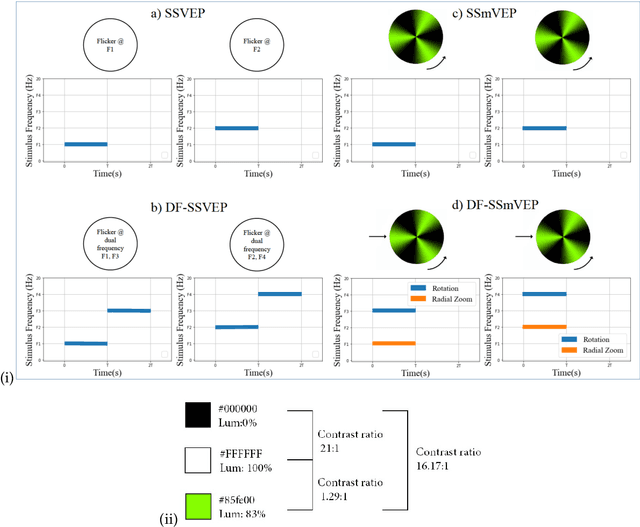
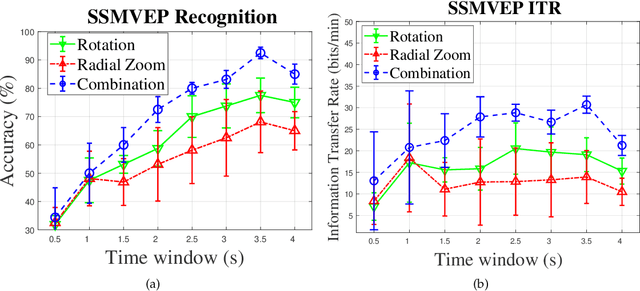
Recent advancements in Electroencephalography (EEG) sensor technologies and signal processing algorithms have paved the way for further evolution of Brain Computer Interfaces (BCI). When it comes to Signal Processing (SP) for BCI, there has been a surge of interest on Steady-State motion-Visual Evoked Potentials (SSmVEP), where motion stimulation is utilized to address key issues associated with conventional light-flashing/flickering. Such benefits, however, come with the price of having less accuracy and less Information Transfer Rate (ITR). In this regard, the paper focuses on the design of a novel SSmVEP paradigm without using resources such as trial time, phase, and/or number of targets to enhance the ITR. The proposed design is based on the intuitively pleasing idea of integrating more than one motion within a single SSmVEP target stimuli, simultaneously. To elicit SSmVEP, we designed a novel and innovative dual frequency aggregated modulation paradigm, referred to as the Dual Frequency Aggregated steady-state motion Visual Evoked Potential (DF-SSmVEP), by concurrently integrating "Radial Zoom" and "Rotation" motions in a single target without increasing the trial length. Compared to conventional SSmVEPs, the proposed DF-SSmVEP framework consists of two motion modes integrated and shown simultaneously each modulated by a specific target frequency. The paper also develops a specific unsupervised classification model, referred to as the Bifold Canonical Correlation Analysis (BCCA), based on two motion frequencies per target. The proposed DF-SSmVEP is evaluated based on a real EEG dataset and the results corroborate its superiority. The proposed DF-SSmVEP outperforms its counterparts and achieved an average ITR of 30.7 +/- 1.97 and an average accuracy of 92.5 +/- 2.04.
NIDA-CLIFGAN: Natural Infrastructure Damage Assessment through Efficient Classification Combining Contrastive Learning, Information Fusion and Generative Adversarial Networks
Oct 27, 2021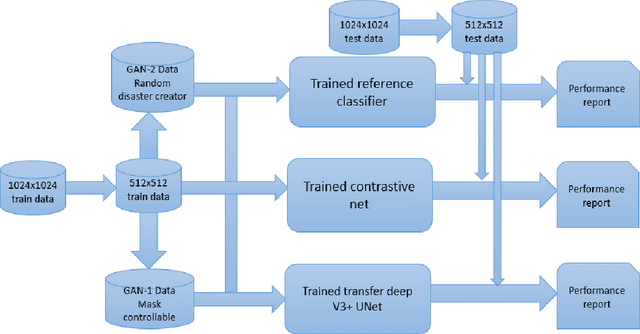

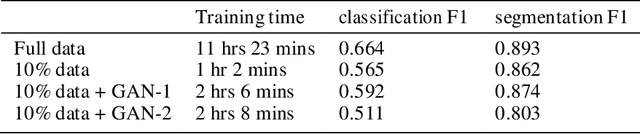
During natural disasters, aircraft and satellites are used to survey the impacted regions. Usually human experts are needed to manually label the degrees of the building damage so that proper humanitarian assistance and disaster response (HADR) can be achieved, which is labor-intensive and time-consuming. Expecting human labeling of major disasters over a wide area gravely slows down the HADR efforts. It is thus of crucial interest to take advantage of the cutting-edge Artificial Intelligence and Machine Learning techniques to speed up the natural infrastructure damage assessment process to achieve effective HADR. Accordingly, the paper demonstrates a systematic effort to achieve efficient building damage classification. First, two novel generative adversarial nets (GANs) are designed to augment data used to train the deep-learning-based classifier. Second, a contrastive learning based method using novel data structures is developed to achieve great performance. Third, by using information fusion, the classifier is effectively trained with very few training data samples for transfer learning. All the classifiers are small enough to be loaded in a smart phone or simple laptop for first responders. Based on the available overhead imagery dataset, results demonstrate data and computational efficiency with 10% of the collected data combined with a GAN reducing the time of computation from roughly half a day to about 1 hour with roughly similar classification performances.
Universal Adversarial Attack on Deep Learning Based Prognostics
Sep 15, 2021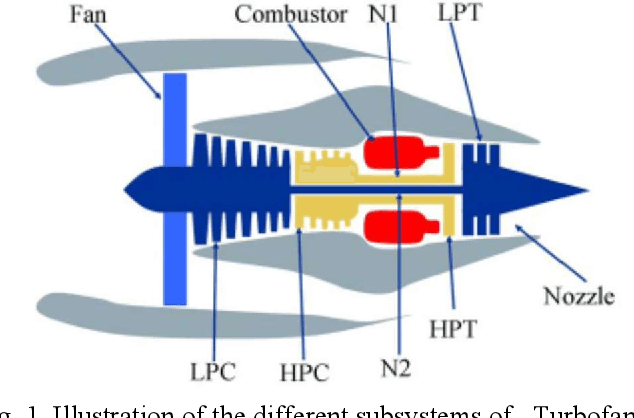
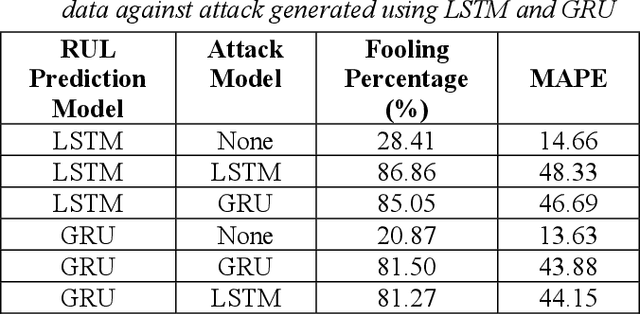
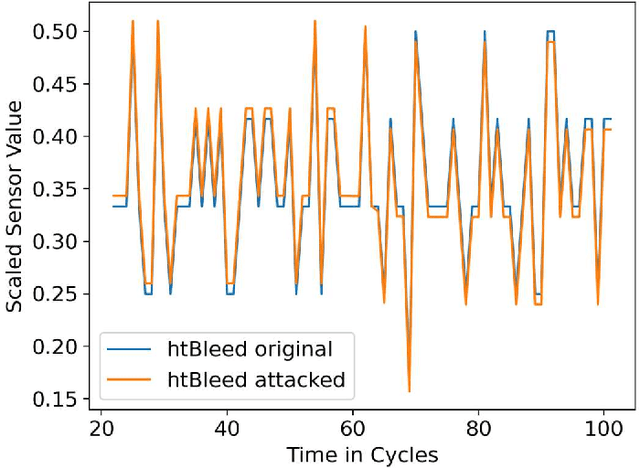
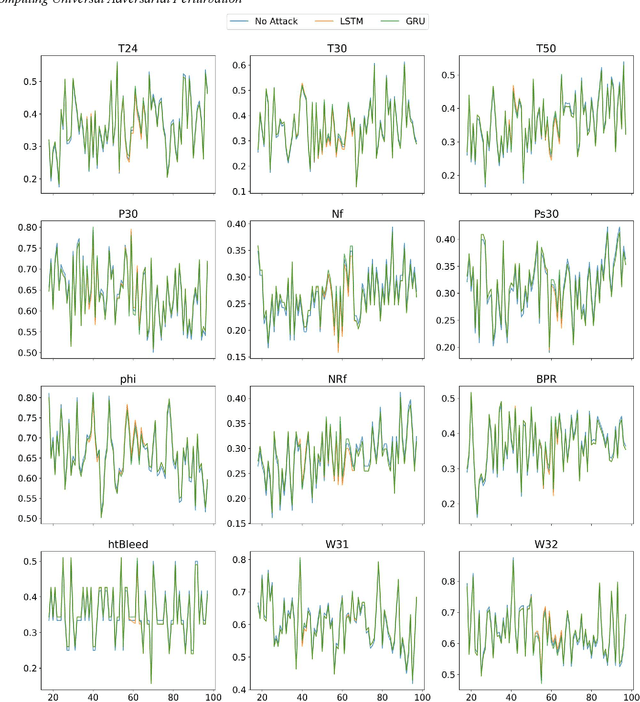
Deep learning-based time series models are being extensively utilized in engineering and manufacturing industries for process control and optimization, asset monitoring, diagnostic and predictive maintenance. These models have shown great improvement in the prediction of the remaining useful life (RUL) of industrial equipment but suffer from inherent vulnerability to adversarial attacks. These attacks can be easily exploited and can lead to catastrophic failure of critical industrial equipment. In general, different adversarial perturbations are computed for each instance of the input data. This is, however, difficult for the attacker to achieve in real time due to higher computational requirement and lack of uninterrupted access to the input data. Hence, we present the concept of universal adversarial perturbation, a special imperceptible noise to fool regression based RUL prediction models. Attackers can easily utilize universal adversarial perturbations for real-time attack since continuous access to input data and repetitive computation of adversarial perturbations are not a prerequisite for the same. We evaluate the effect of universal adversarial attacks using NASA turbofan engine dataset. We show that addition of universal adversarial perturbation to any instance of the input data increases error in the output predicted by the model. To the best of our knowledge, we are the first to study the effect of the universal adversarial perturbation on time series regression models. We further demonstrate the effect of varying the strength of perturbations on RUL prediction models and found that model accuracy decreases with the increase in perturbation strength of the universal adversarial attack. We also showcase that universal adversarial perturbation can be transferred across different models.
Pedestrian Wind Factor Estimation in Complex Urban Environments
Oct 06, 2021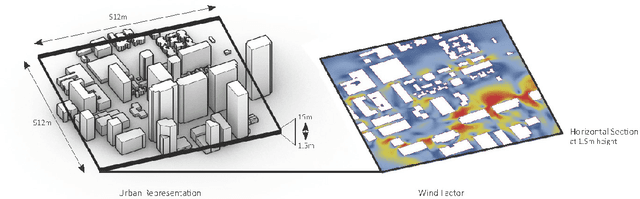
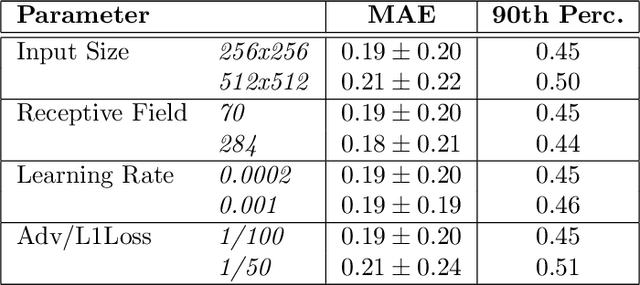
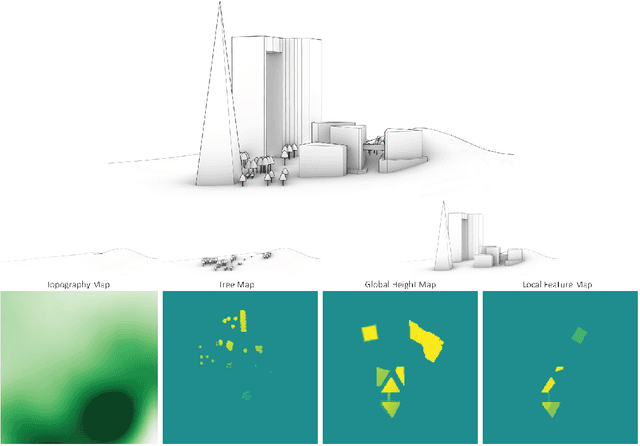

Urban planners and policy makers face the challenge of creating livable and enjoyable cities for larger populations in much denser urban conditions. While the urban microclimate holds a key role in defining the quality of urban spaces today and in the future, the integration of wind microclimate assessment in early urban design and planning processes remains a challenge due to the complexity and high computational expense of computational fluid dynamics (CFD) simulations. This work develops a data-driven workflow for real-time pedestrian wind comfort estimation in complex urban environments which may enable designers, policy makers and city residents to make informed decisions about mobility, health, and energy choices. We use a conditional generative adversarial network (cGAN) architecture to reduce the computational computation while maintaining high confidence levels and interpretability, adequate representation of urban complexity, and suitability for pedestrian comfort estimation. We demonstrate high quality wind field approximations while reducing computation time from days to seconds.
* 16 pages, 5 figures
Hyperspectral Neutron CT with Material Decomposition
Oct 06, 2021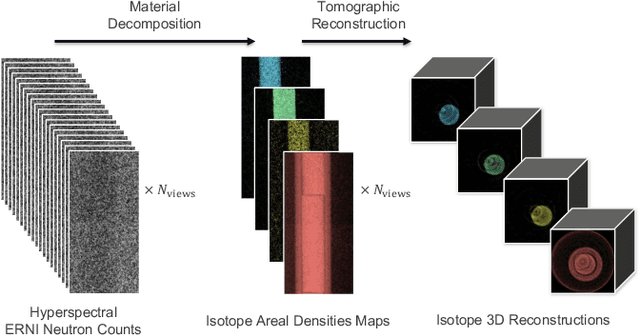
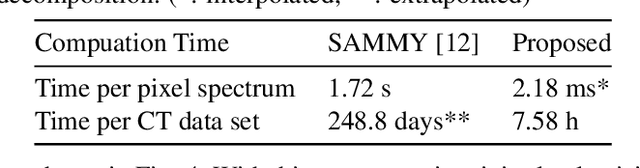
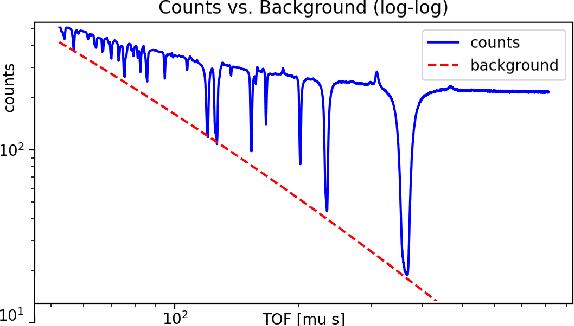
Energy resolved neutron imaging (ERNI) is an advanced neutron radiography technique capable of non-destructively extracting spatial isotopic information within a given material. Energy-dependent radiography image sequences can be created by utilizing neutron time-of-flight techniques. In combination with uniquely characteristic isotopic neutron cross-section spectra, isotopic areal densities can be determined on a per-pixel basis, thus resulting in a set of areal density images for each isotope present in the sample. By preforming ERNI measurements over several rotational views, an isotope decomposed 3D computed tomography is possible. We demonstrate a method involving a robust and automated background estimation based on a linear programming formulation. The extremely high noise due to low count measurements is overcome using a sparse coding approach. It allows for a significant computation time improvement, from weeks to a few hours compared to existing neutron evaluation tools, enabling at the present stage a semi-quantitative, user-friendly routine application.
* 5 pages, 4 figures
DNN-assisted Particle-based Bayesian Joint Synchronization and Localization
Sep 29, 2021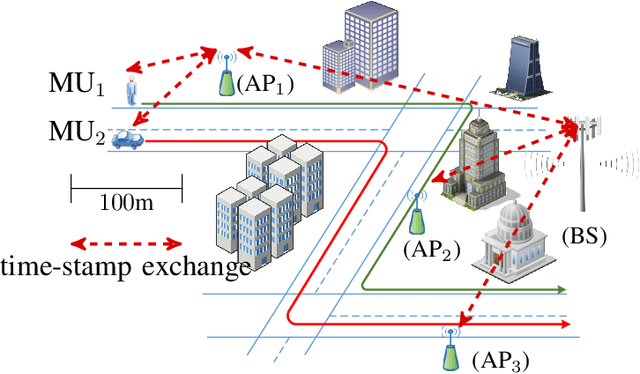
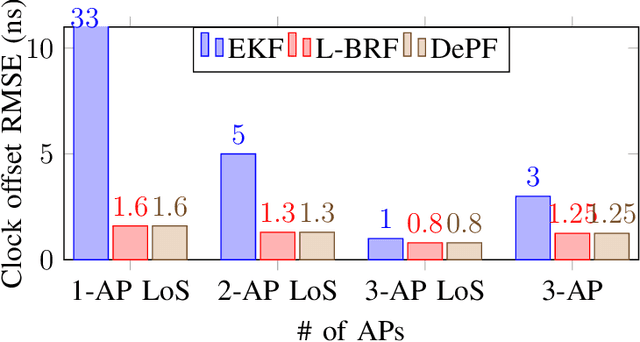
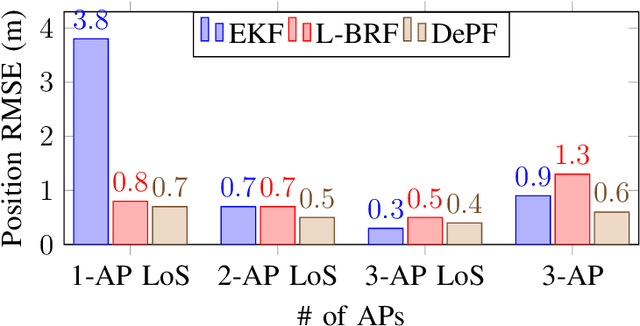
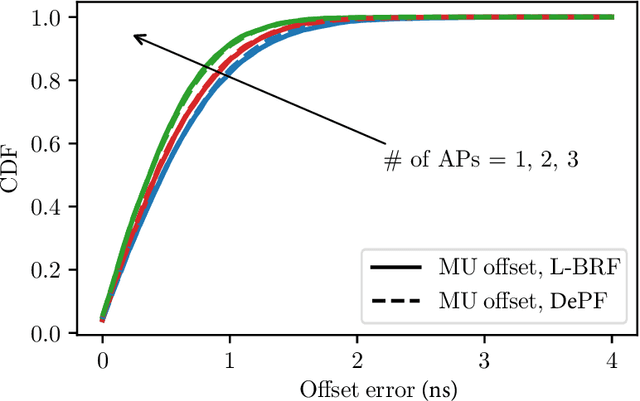
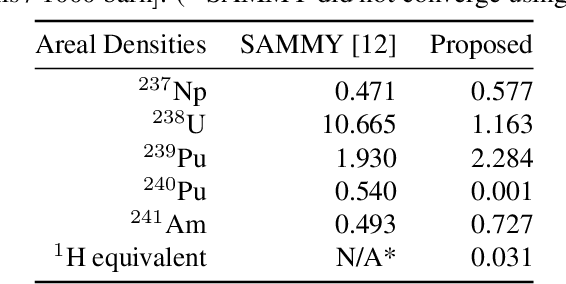
In this work, we propose a Deep neural network-assisted Particle Filter-based (DePF) approach to address the Mobile User (MU) joint synchronization and localization (sync\&loc) problem in ultra dense networks. In particular, DePF deploys an asymmetric time-stamp exchange mechanism between the MUs and the Access Points (APs), which, traditionally, provides us with information about the MUs' clock offset and skew. However, information about the distance between an AP and an MU is also intrinsic to the propagation delay experienced by exchanged time-stamps. In addition, to estimate the angle of arrival of the received synchronization packet, DePF draws on the multiple signal classification algorithm that is fed by Channel Impulse Response (CIR) experienced by the sync packets. The CIR is also leveraged on to determine the link condition, i.e. Line-of-Sight (LoS) or Non-LoS. Finally, to perform joint sync\&loc, DePF capitalizes on particle Gaussian mixtures that allow for a hybrid particle-based and parametric Bayesian Recursive Filtering (BRF) fusion of the aforementioned pieces of information and thus jointly estimate the position and clock parameters of the MUs. The simulation results verifies the superiority of the proposed algorithm over the state-of-the-art schemes, especially that of Extended Kalman filter- and linearized BRF-based joint sync\&loc. In particular, only drawing on the synchronization time-stamp exchange and CIRs, for 90$\%$of the cases, the absolute position and clock offset estimation error remain below 1 meter and 2 nanoseconds, respectively.
Simulation platform for pattern recognition based on reservoir computing with memristor networks
Dec 01, 2021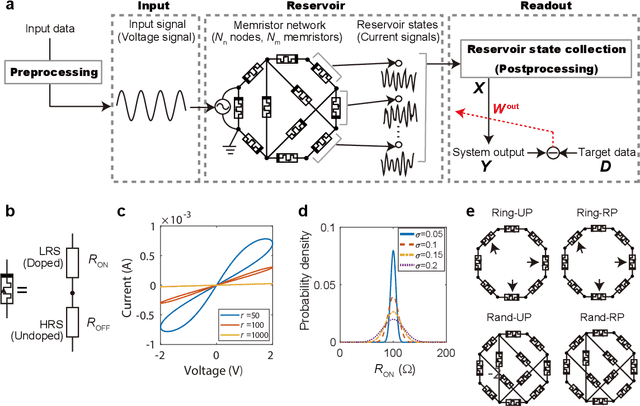
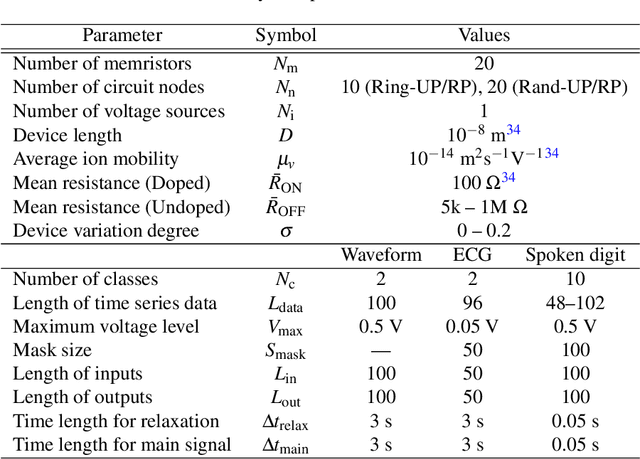
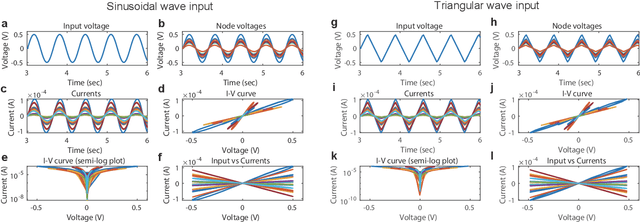
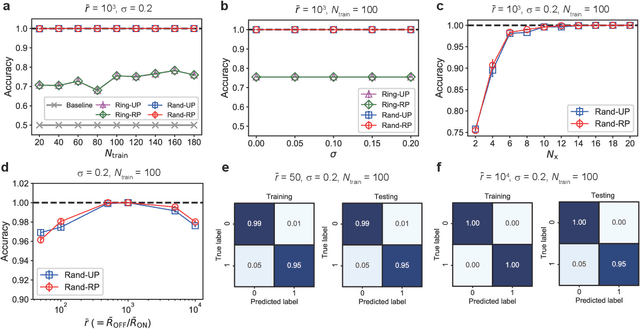
Memristive systems and devices are potentially available for implementing reservoir computing (RC) systems applied to pattern recognition. However, the computational ability of memristive RC systems depends on intertwined factors such as system architectures and physical properties of memristive elements, which complicates identifying the key factor for system performance. Here we develop a simulation platform for RC with memristor device networks, which enables testing different system designs for performance improvement. Numerical simulations show that the memristor-network-based RC systems can yield high computational performance comparable to that of state-of-the-art methods in three time series classification tasks. We demonstrate that the excellent and robust computation under device-to-device variability can be achieved by appropriately setting network structures, nonlinearity of memristors, and pre/post-processing, which increases the potential for reliable computation with unreliable component devices. Our results contribute to an establishment of a design guide for memristive reservoirs toward a realization of energy-efficient machine learning hardware.
3D LiDAR Aided GNSS NLOS Mitigation in Urban Canyons
Dec 12, 2021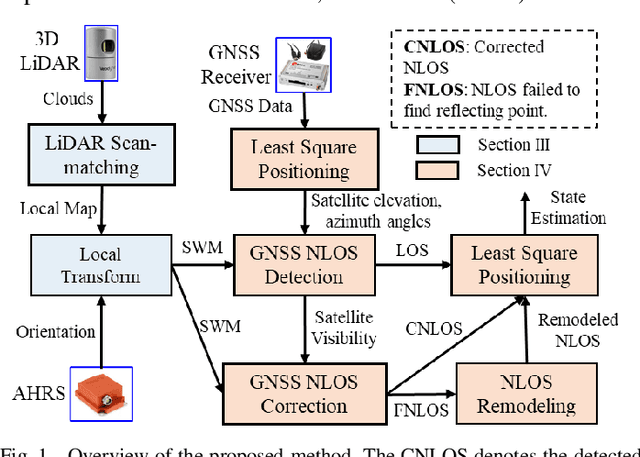
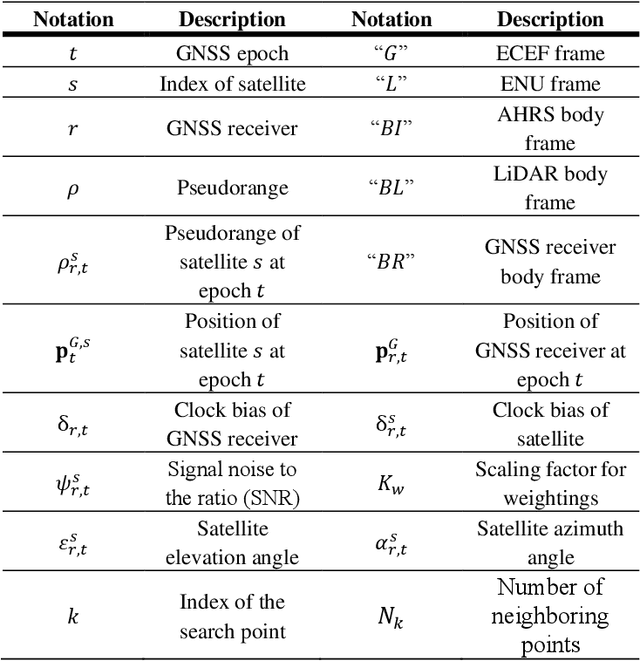
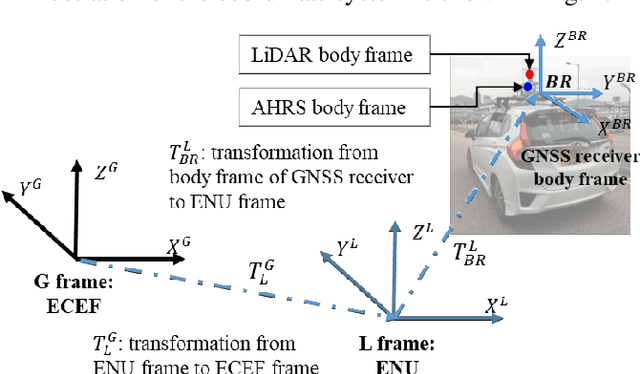
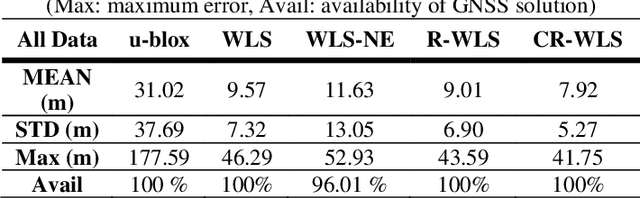
In this paper, we propose a 3D LiDAR aided global navigation satellite system (GNSS) non-line-of-sight (NLOS) mitigation method caused by both static buildings and dynamic objects. A sliding window map describing the surrounding of the ego-vehicle is first generated, based on real-time 3D point clouds from a 3D LiDAR sensor. Then, NLOS receptions are detected based on the sliding window map using a proposed fast searching method which is free of the initial guess of the position of the GNSS receiver. Instead of directly excluding the detected NLOS satellites from further positioning estimation, this paper rectifies the pseudorange measurement model by (1) correcting the pseudorange measurements if the reflecting point of NLOS signals is detected inside the sliding window map, and (2) remodeling the uncertainty of the NLOS pseudorange measurement using a novel weighting scheme. We evaluated the performance of the proposed method in several typical urban canyons in Hong Kong using an automobile-level GNSS receiver. Moreover, we also evaluate the potential of the proposed NLOS mitigation method in GNSS and inertial navigation systems integration via factor graph optimization.
Mesh Draping: Parametrization-Free Neural Mesh Transfer
Oct 11, 2021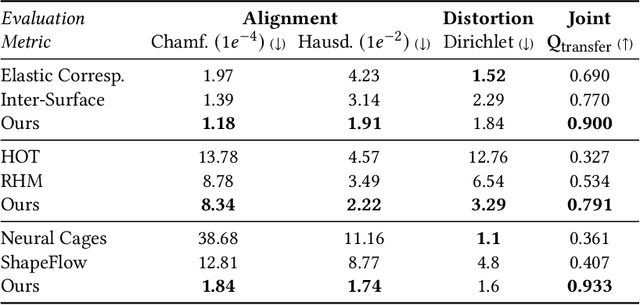
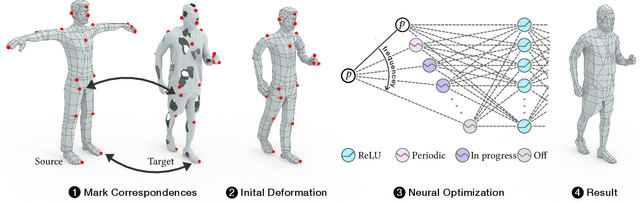
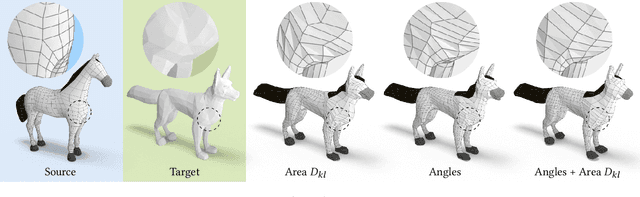
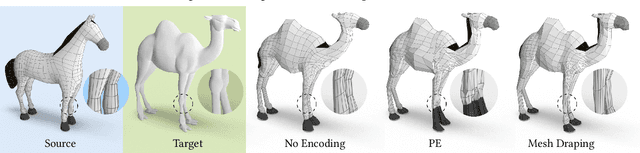
Despite recent advances in geometric modeling, 3D mesh modeling still involves a considerable amount of manual labor by experts. In this paper, we introduce Mesh Draping: a neural method for transferring existing mesh structure from one shape to another. The method drapes the source mesh over the target geometry and at the same time seeks to preserve the carefully designed characteristics of the source mesh. At its core, our method deforms the source mesh using progressive positional encoding. We show that by leveraging gradually increasing frequencies to guide the neural optimization, we are able to achieve stable and high quality mesh transfer. Our approach is simple and requires little user guidance, compared to contemporary surface mapping techniques which rely on parametrization or careful manual tuning. Most importantly, Mesh Draping is a parameterization-free method, and thus applicable to a variety of target shape representations, including point clouds, polygon soups, and non-manifold meshes. We demonstrate that the transferred meshing remains faithful to the source mesh design characteristics, and at the same time fits the target geometry well.
Anchoring to Exemplars for Training Mixture-of-Expert Cell Embeddings
Dec 06, 2021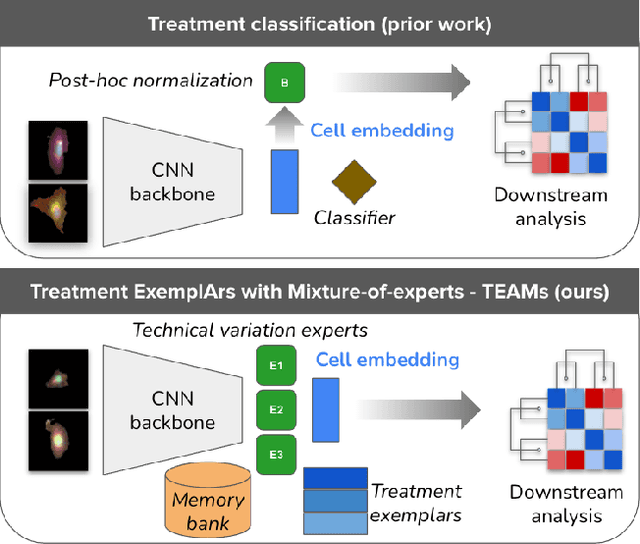

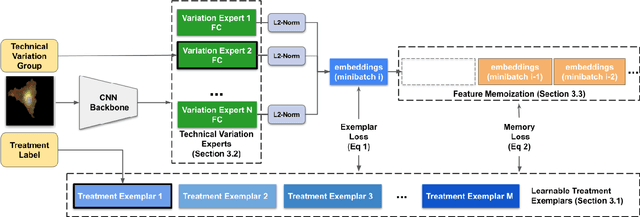
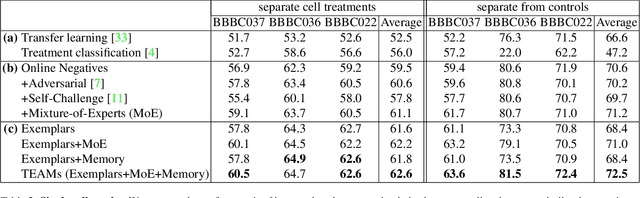
Analyzing the morphology of cells in microscopy images can provide insights into the mechanism of compounds or the function of genes. Addressing this task requires methods that can not only extract biological information from the images, but also ignore technical variations, ie, changes in experimental procedure or differences between equipments used to collect microscopy images. We propose Treatment ExemplArs with Mixture-of-experts (TEAMs), an embedding learning approach that learns a set of experts that are specialized in capturing technical variations in our training set and then aggregates specialist's predictions at test time. Thus, TEAMs can learn powerful embeddings with less technical variation bias by minimizing the noise from every expert. To train our model, we leverage Treatment Exemplars that enable our approach to capture the distribution of the entire dataset in every minibatch while still fitting into GPU memory. We evaluate our approach on three datasets for tasks like drug discovery, boosting performance on identifying the true mechanism of action of cell treatments by 5.5-11% over the state-of-the-art.