 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Adaptive Elastic Training for Sparse Deep Learning on Heterogeneous Multi-GPU Servers
Oct 13, 2021
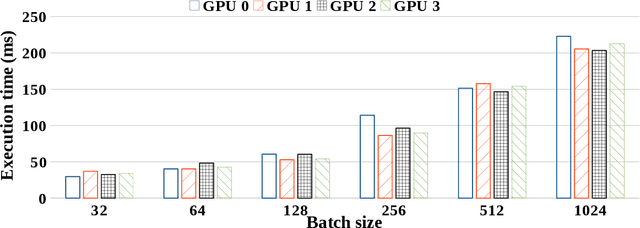

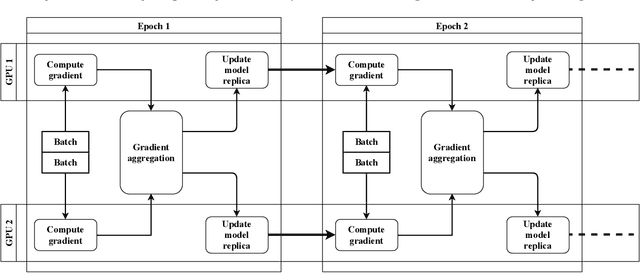
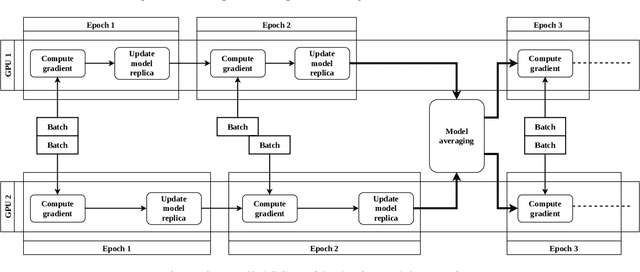
Motivated by extreme multi-label classification applications, we consider training deep learning models over sparse data in multi-GPU servers. The variance in the number of non-zero features across training batches and the intrinsic GPU heterogeneity combine to limit accuracy and increase the time to convergence. We address these challenges with Adaptive SGD, an adaptive elastic model averaging stochastic gradient descent algorithm for heterogeneous multi-GPUs that is characterized by dynamic scheduling, adaptive batch size scaling, and normalized model merging. Instead of statically partitioning batches to GPUs, batches are routed based on the relative processing speed. Batch size scaling assigns larger batches to the faster GPUs and smaller batches to the slower ones, with the goal to arrive at a steady state in which all the GPUs perform the same number of model updates. Normalized model merging computes optimal weights for every GPU based on the assigned batches such that the combined model achieves better accuracy. We show experimentally that Adaptive SGD outperforms four state-of-the-art solutions in time-to-accuracy and is scalable with the number of GPUs.
RIO: Rotation-equivariance supervised learning of robust inertial odometry
Nov 23, 2021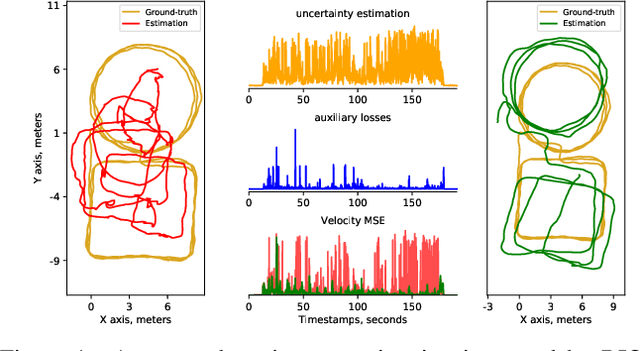
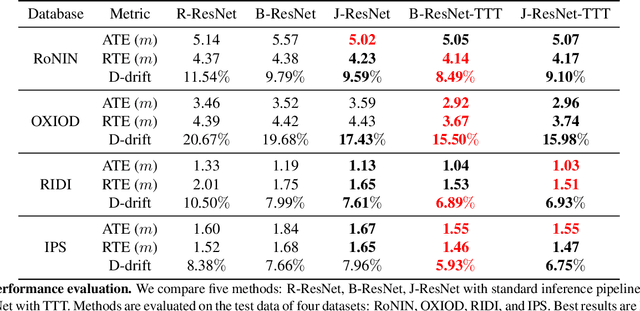
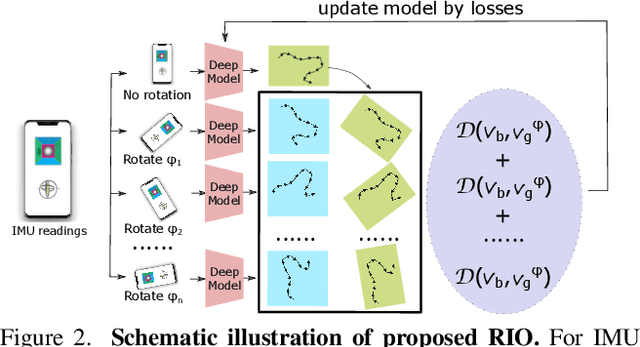
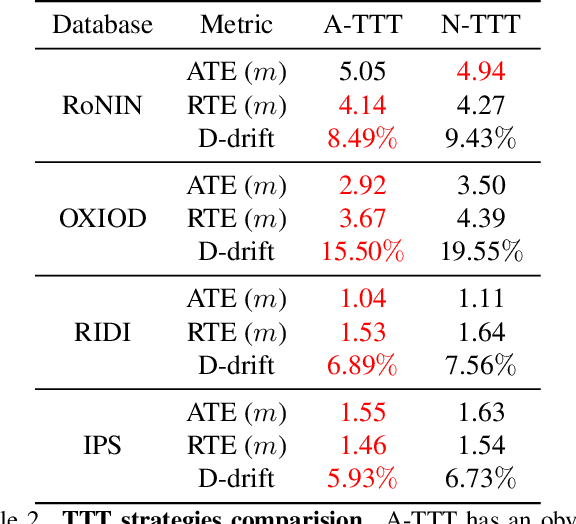
This paper introduces rotation-equivariance as a self-supervisor to train inertial odometry models. We demonstrate that the self-supervised scheme provides a powerful supervisory signal at training phase as well as at inference stage. It reduces the reliance on massive amounts of labeled data for training a robust model and makes it possible to update the model using various unlabeled data. Further, we propose adaptive Test-Time Training (TTT) based on uncertainty estimations in order to enhance the generalizability of the inertial odometry to various unseen data. We show in experiments that the Rotation-equivariance-supervised Inertial Odometry (RIO) trained with 30% data achieves on par performance with a model trained with the whole database. Adaptive TTT improves models performance in all cases and makes more than 25% improvements under several scenarios.
Real-time Quadrotor Navigation Through Planning in Depth Space in Unstructured Environments
Oct 18, 2020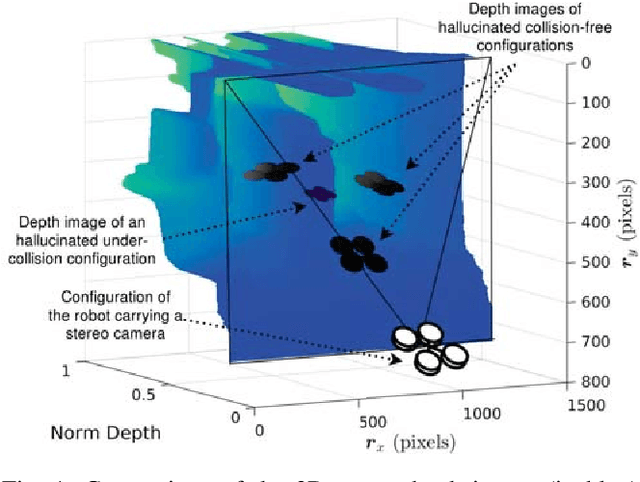
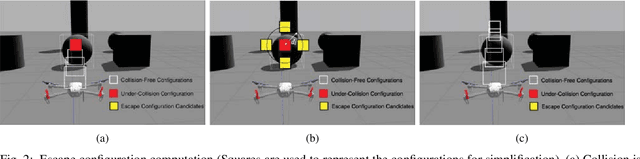
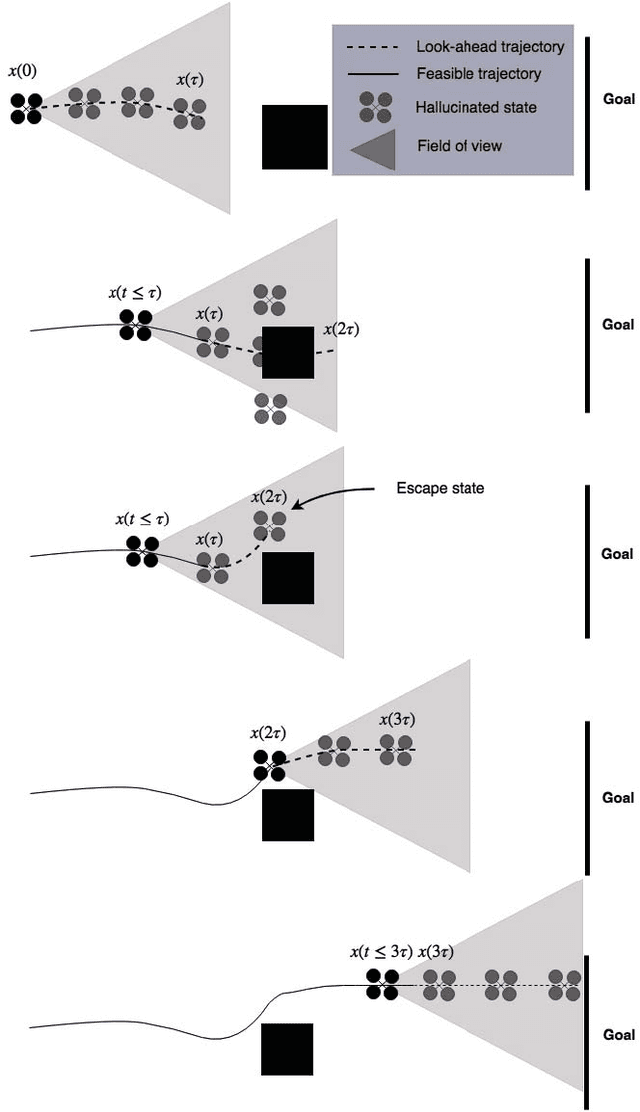
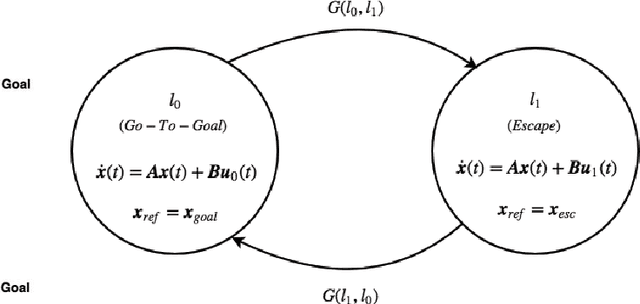
This paper addresses the problem of real-time vision-based autonomous obstacle avoidance in unstructured environments for quadrotor UAVs. We assume that our UAV is equipped with a forward facing stereo camera as the only sensor to perceive the world around it. Moreover, all the computations are performed onboard. Feasible trajectory generation in this kind of problems requires rapid collision checks along with efficient planning algorithms. We propose a trajectory generation approach in the depth image space, which refers to the environment information as depicted by the depth images. In order to predict the collision in a look ahead robot trajectory, we create depth images from the sequence of robot poses along the path. We compare these images with the depth images of the actual world sensed through the forward facing stereo camera. We aim at generating fuel optimal trajectories inside the depth image space. In case of a predicted collision, a switching strategy is used to aggressively deviate the quadrotor away from the obstacle. For this purpose we use two closed loop motion primitives based on Linear Quadratic Regulator (LQR) objective functions. The proposed approach is validated through simulation and hardware experiments.
Finding General Equilibria in Many-Agent Economic Simulations Using Deep Reinforcement Learning
Jan 03, 2022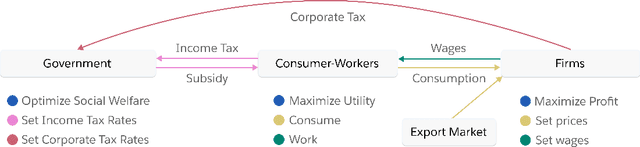

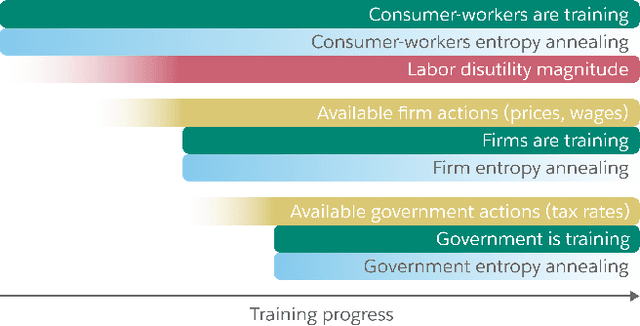
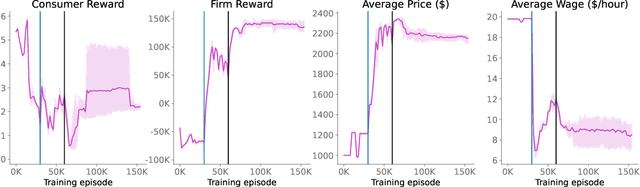
Real economies can be seen as a sequential imperfect-information game with many heterogeneous, interacting strategic agents of various agent types, such as consumers, firms, and governments. Dynamic general equilibrium models are common economic tools to model the economic activity, interactions, and outcomes in such systems. However, existing analytical and computational methods struggle to find explicit equilibria when all agents are strategic and interact, while joint learning is unstable and challenging. Amongst others, a key reason is that the actions of one economic agent may change the reward function of another agent, e.g., a consumer's expendable income changes when firms change prices or governments change taxes. We show that multi-agent deep reinforcement learning (RL) can discover stable solutions that are epsilon-Nash equilibria for a meta-game over agent types, in economic simulations with many agents, through the use of structured learning curricula and efficient GPU-only simulation and training. Conceptually, our approach is more flexible and does not need unrealistic assumptions, e.g., market clearing, that are commonly used for analytical tractability. Our GPU implementation enables training and analyzing economies with a large number of agents within reasonable time frames, e.g., training completes within a day. We demonstrate our approach in real-business-cycle models, a representative family of DGE models, with 100 worker-consumers, 10 firms, and a government who taxes and redistributes. We validate the learned meta-game epsilon-Nash equilibria through approximate best-response analyses, show that RL policies align with economic intuitions, and that our approach is constructive, e.g., by explicitly learning a spectrum of meta-game epsilon-Nash equilibria in open RBC models.
Multi-Robot On-site Shared Analytics Information and Computing
Dec 13, 2021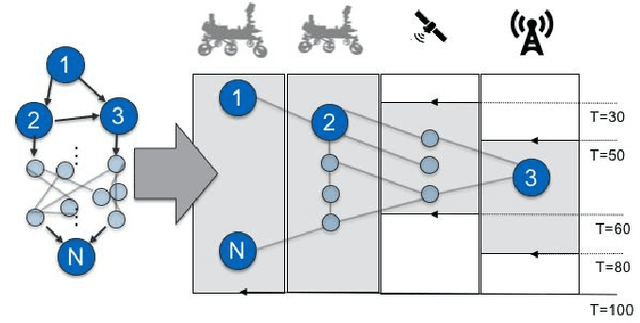
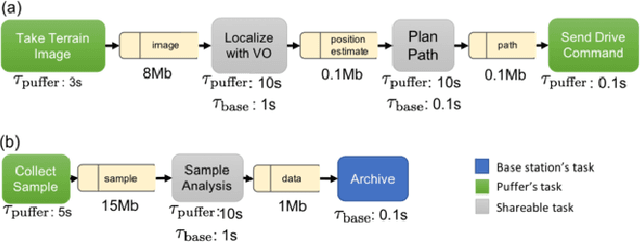
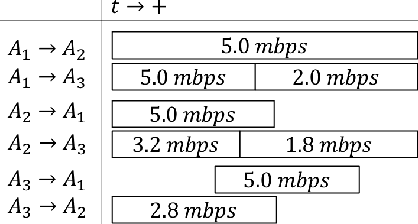
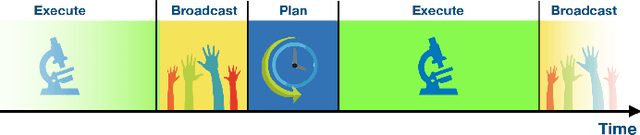
Computation load-sharing across a network of heterogeneous robots is a promising approach to increase robots capabilities and efficiency as a team in extreme environments. However, in such environments, communication links may be intermittent and connections to the cloud or internet may be nonexistent. In this paper we introduce a communication-aware, computation task scheduling problem for multi-robot systems and propose an integer linear program (ILP) that optimizes the allocation of computational tasks across a network of heterogeneous robots, accounting for the networked robots' computational capabilities and for available (and possibly time-varying) communication links. We consider scheduling of a set of inter-dependent required and optional tasks modeled by a dependency graph. We present a consensus-backed scheduling architecture for shared-world, distributed systems. We validate the ILP formulation and the distributed implementation in different computation platforms and in simulated scenarios with a bias towards lunar or planetary exploration scenarios. Our results show that the proposed implementation can optimize schedules to allow a threefold increase the amount of rewarding tasks performed (e.g., science measurements) compared to an analogous system with no computational load-sharing.
Batched Thompson Sampling
Oct 01, 2021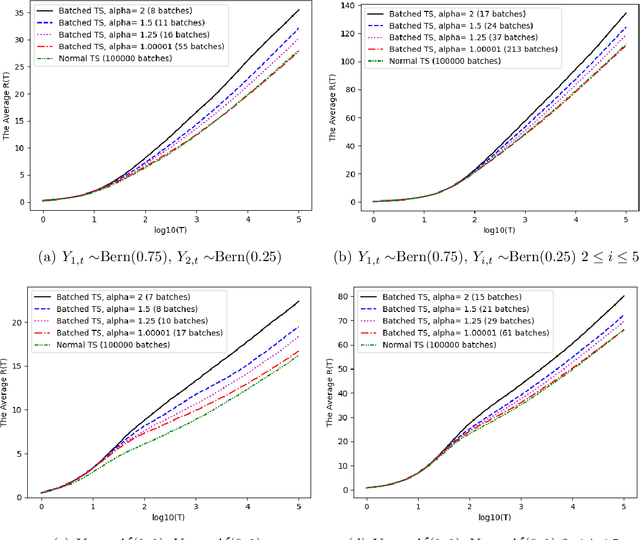
We introduce a novel anytime Batched Thompson sampling policy for multi-armed bandits where the agent observes the rewards of her actions and adjusts her policy only at the end of a small number of batches. We show that this policy simultaneously achieves a problem dependent regret of order $O(\log(T))$ and a minimax regret of order $O(\sqrt{T\log(T)})$ while the number of batches can be bounded by $O(\log(T))$ independent of the problem instance over a time horizon $T$. We also show that in expectation the number of batches used by our policy can be bounded by an instance dependent bound of order $O(\log\log(T))$. These results indicate that Thompson sampling maintains the same performance in this batched setting as in the case when instantaneous feedback is available after each action, while requiring minimal feedback. These results also indicate that Thompson sampling performs competitively with recently proposed algorithms tailored for the batched setting. These algorithms optimize the batch structure for a given time horizon $T$ and prioritize exploration in the beginning of the experiment to eliminate suboptimal actions. We show that Thompson sampling combined with an adaptive batching strategy can achieve a similar performance without knowing the time horizon $T$ of the problem and without having to carefully optimize the batch structure to achieve a target regret bound (i.e. problem dependent vs minimax regret) for a given $T$.
Tackling Dynamics in Federated Incremental Learning with Variational Embedding Rehearsal
Oct 19, 2021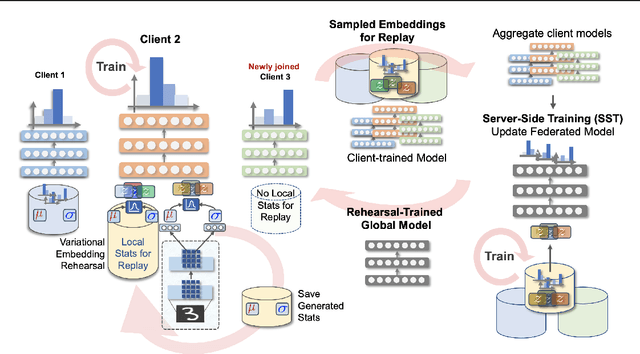
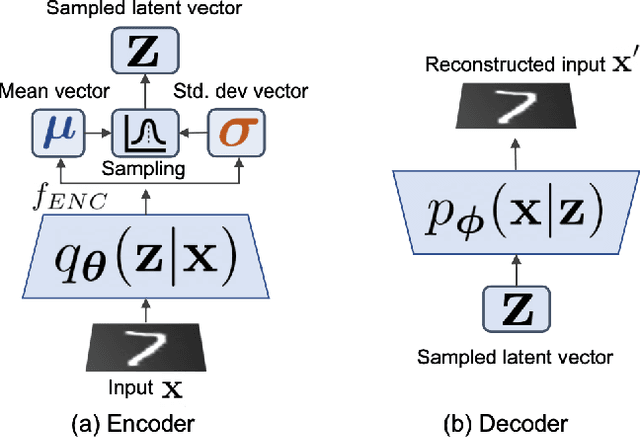
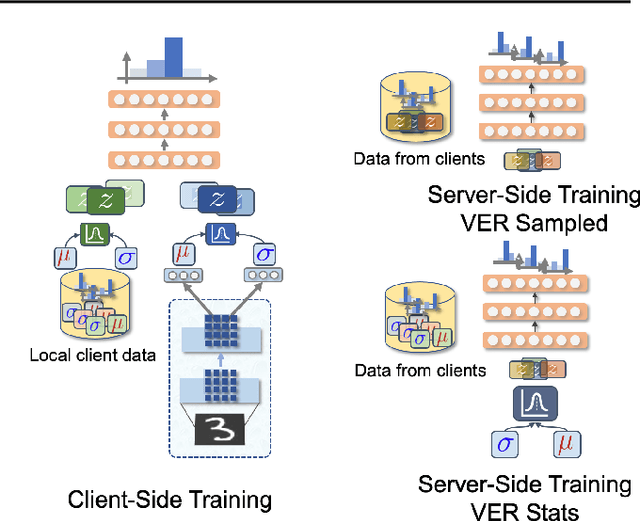
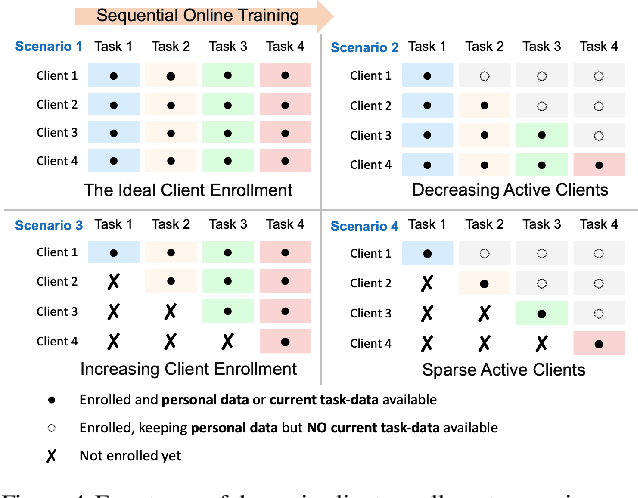
Federated Learning is a fast growing area of ML where the training datasets are extremely distributed, all while dynamically changing over time. Models need to be trained on clients' devices without any guarantees for either homogeneity or stationarity of the local private data. The need for continual training has also risen, due to the ever-increasing production of in-task data. However, pursuing both directions at the same time is challenging, since client data privacy is a major constraint, especially for rehearsal methods. Herein, we propose a novel algorithm to address the incremental learning process in an FL scenario, based on realistic client enrollment scenarios where clients can drop in or out dynamically. We first propose using deep Variational Embeddings that secure the privacy of the client data. Second, we propose a server-side training method that enables a model to rehearse the previously learnt knowledge. Finally, we investigate the performance of federated incremental learning in dynamic client enrollment scenarios. The proposed method shows parity with offline training on domain-incremental learning, addressing challenges in both the dynamic enrollment of clients and the domain shifting of client data.
Word Graph Guided Summarization for Radiology Findings
Dec 18, 2021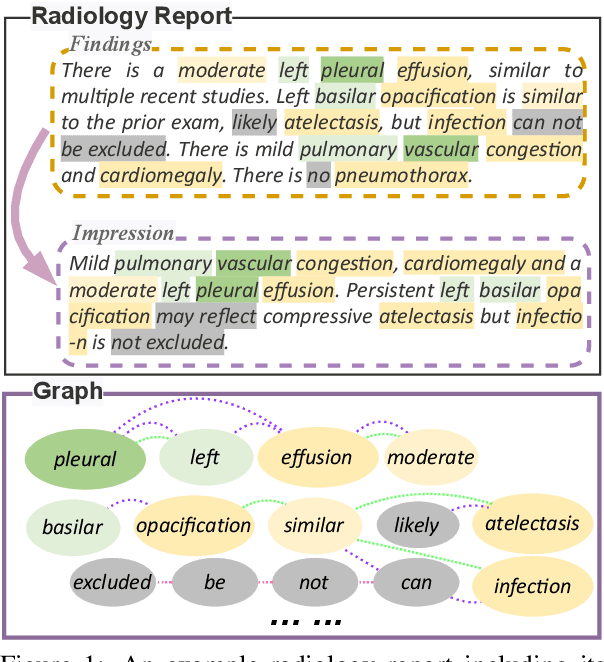
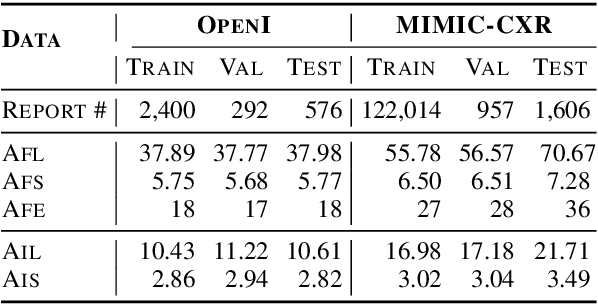
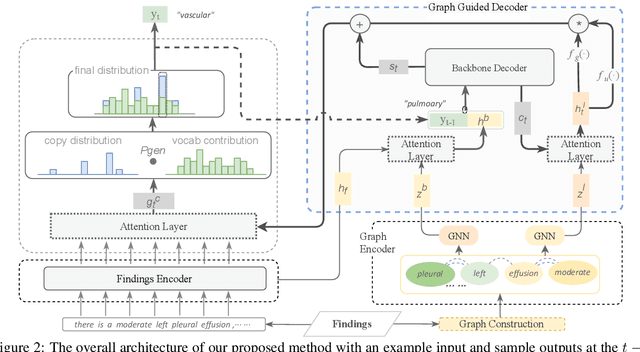
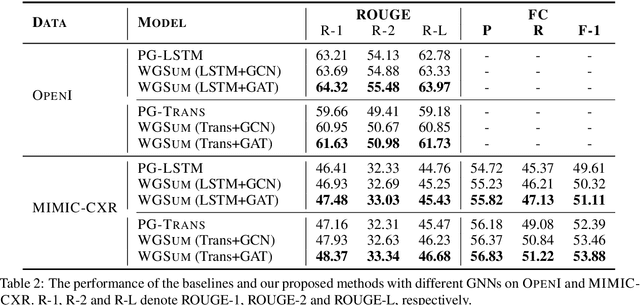
Radiology reports play a critical role in communicating medical findings to physicians. In each report, the impression section summarizes essential radiology findings. In clinical practice, writing impression is highly demanded yet time-consuming and prone to errors for radiologists. Therefore, automatic impression generation has emerged as an attractive research direction to facilitate such clinical practice. Existing studies mainly focused on introducing salient word information to the general text summarization framework to guide the selection of the key content in radiology findings. However, for this task, a model needs not only capture the important words in findings but also accurately describe their relations so as to generate high-quality impressions. In this paper, we propose a novel method for automatic impression generation, where a word graph is constructed from the findings to record the critical words and their relations, then a Word Graph guided Summarization model (WGSum) is designed to generate impressions with the help of the word graph. Experimental results on two datasets, OpenI and MIMIC-CXR, confirm the validity and effectiveness of our proposed approach, where the state-of-the-art results are achieved on both datasets. Further experiments are also conducted to analyze the impact of different graph designs to the performance of our method.
Real-Time Panoptic Segmentation from Dense Detections
Dec 04, 2019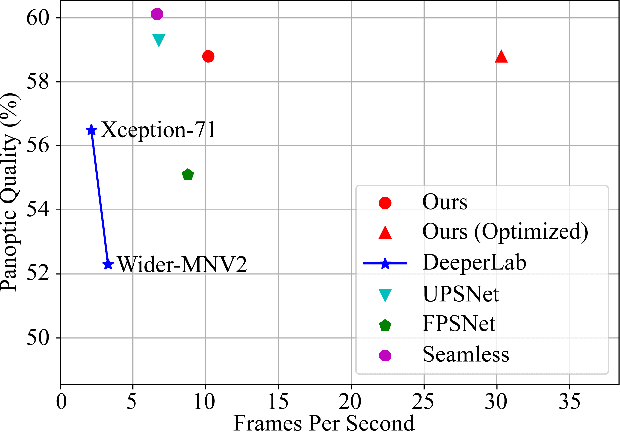
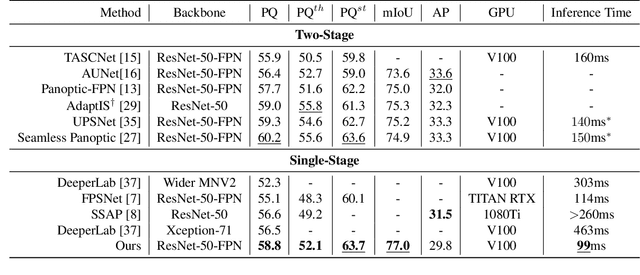
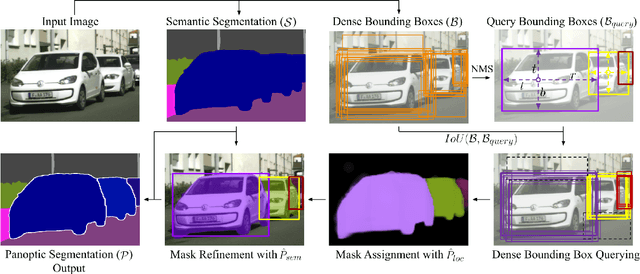
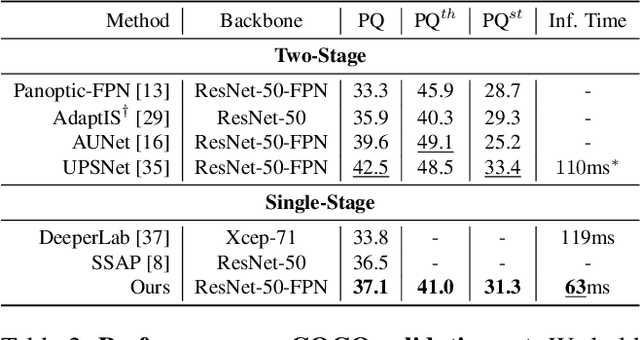
Panoptic segmentation is a complex full scene parsing task requiring simultaneous instance and semantic segmentation at high resolution. Current state-of-the-art approaches cannot run in real-time, and simplifying these architectures to improve efficiency severely degrades their accuracy. In this paper, we propose a new single-shot panoptic segmentation network that leverages dense detections and a global self-attention mechanism to operate in real-time with performance approaching the state of the art. We introduce a novel parameter-free mask construction method that substantially reduces computational complexity by efficiently reusing information from the object detection and semantic segmentation sub-tasks. The resulting network has a simple data flow that does not require feature map re-sampling or clustering post-processing, enabling significant hardware acceleration. Our experiments on the Cityscapes and COCO benchmarks show that our network works at 30 FPS on 1024x2048 resolution, trading a 3% relative performance degradation from the current state of the art for up to 440% faster inference.
Channel Estimation for STAR-RIS-aided Wireless Communication
Dec 02, 2021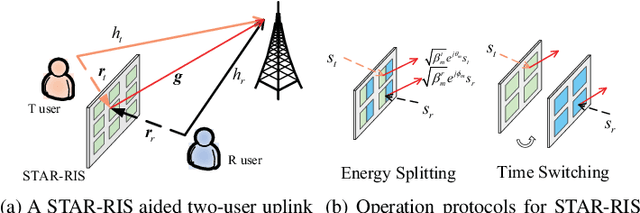
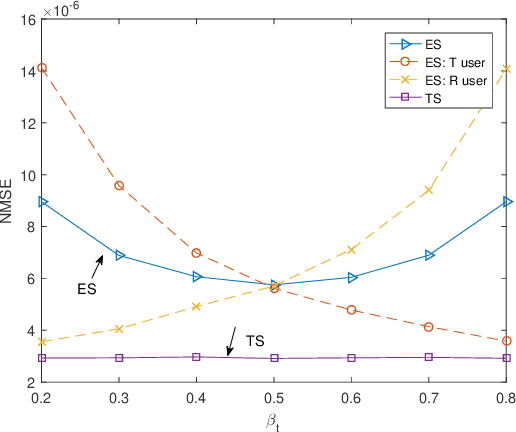
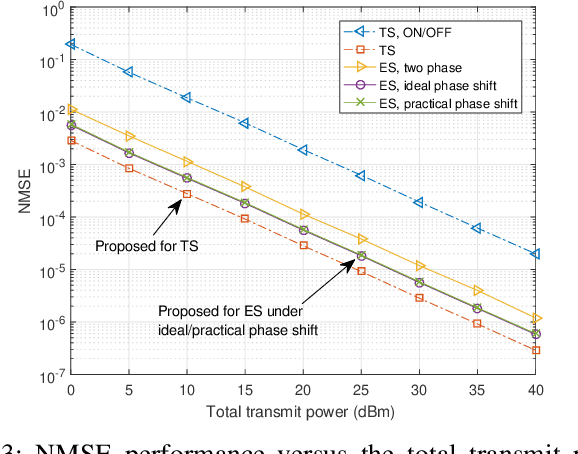
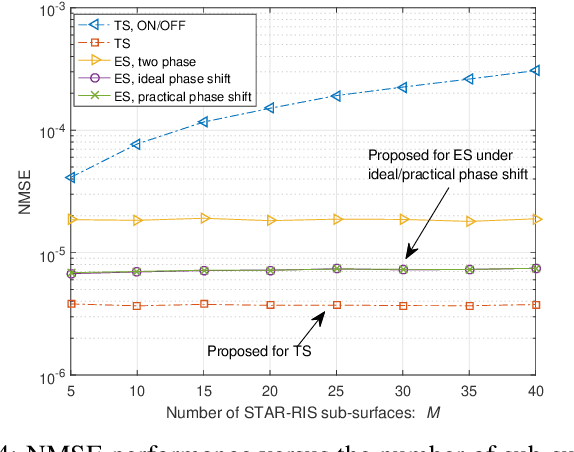
In this letter, we study efficient uplink channel estimation design for a simultaneously transmitting and reflecting reconfigurable intelligent surface (STAR-RIS) assisted two-user communication systems. We first consider the time switching (TS) protocol for STAR-RIS and propose an efficient scheme to separately estimate the channels of the two users with optimized training (transmission/reflection) pattern. Next, we consider the energy splitting (ES) protocol for STAR-RIS under the practical coupled phase-shift model and devise a customized scheme to simultaneously estimate the channels of both users. Although the problem of minimizing the resultant channel estimation error for the ES protocol is difficult to solve, we propose an efficient algorithm to obtain a high-quality solution by jointly designing the pilot sequences, power-splitting ratio, and training patterns. Numerical results show the effectiveness of the proposed channel estimation designs and reveal that the STAR-RIS under the TS protocol achieves a smaller channel estimation error than the ES case.