 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
CodeMapping: Real-Time Dense Mapping for Sparse SLAM using Compact Scene Representations
Jul 19, 2021
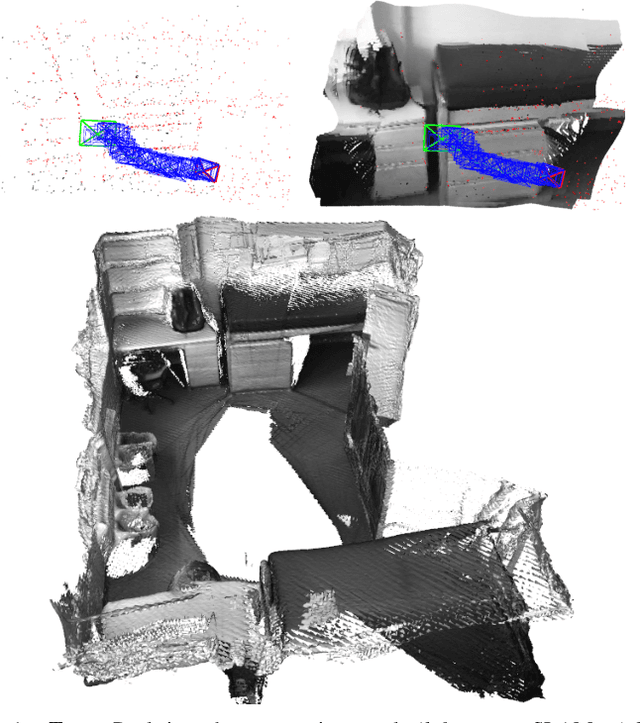
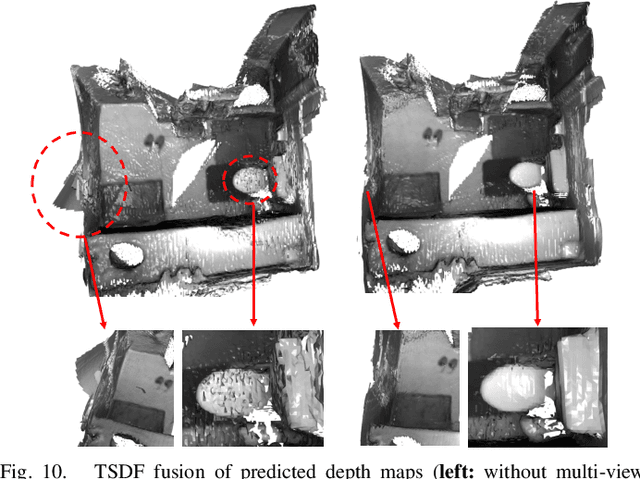
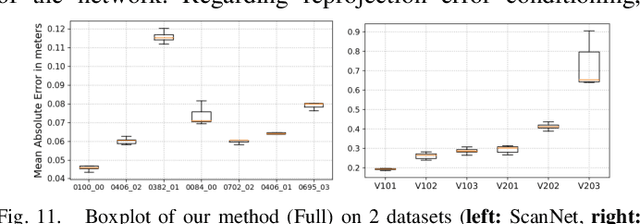
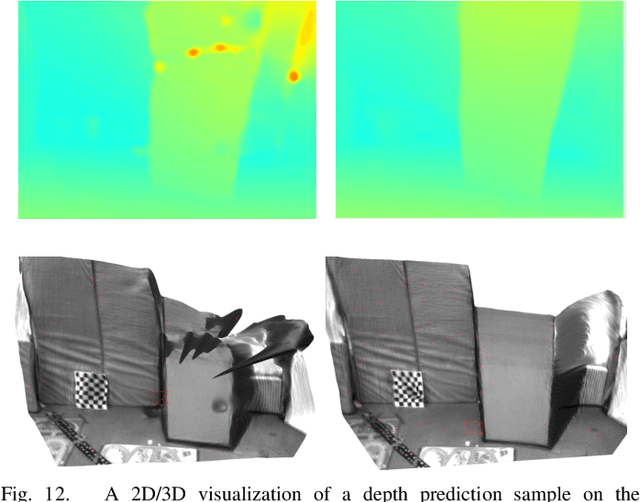
We propose a novel dense mapping framework for sparse visual SLAM systems which leverages a compact scene representation. State-of-the-art sparse visual SLAM systems provide accurate and reliable estimates of the camera trajectory and locations of landmarks. While these sparse maps are useful for localization, they cannot be used for other tasks such as obstacle avoidance or scene understanding. In this paper we propose a dense mapping framework to complement sparse visual SLAM systems which takes as input the camera poses, keyframes and sparse points produced by the SLAM system and predicts a dense depth image for every keyframe. We build on CodeSLAM and use a variational autoencoder (VAE) which is conditioned on intensity, sparse depth and reprojection error images from sparse SLAM to predict an uncertainty-aware dense depth map. The use of a VAE then enables us to refine the dense depth images through multi-view optimization which improves the consistency of overlapping frames. Our mapper runs in a separate thread in parallel to the SLAM system in a loosely coupled manner. This flexible design allows for integration with arbitrary metric sparse SLAM systems without delaying the main SLAM process. Our dense mapper can be used not only for local mapping but also globally consistent dense 3D reconstruction through TSDF fusion. We demonstrate our system running with ORB-SLAM3 and show accurate dense depth estimation which could enable applications such as robotics and augmented reality.
DCF-ASN: Coarse-to-fine Real-time Visual Tracking via Discriminative Correlation Filter and Attentional Siamese Network
Mar 19, 2021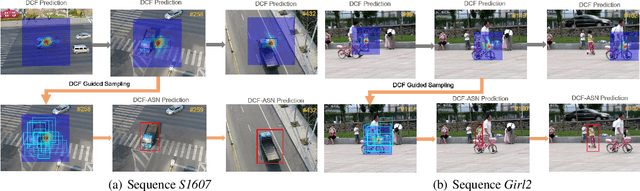
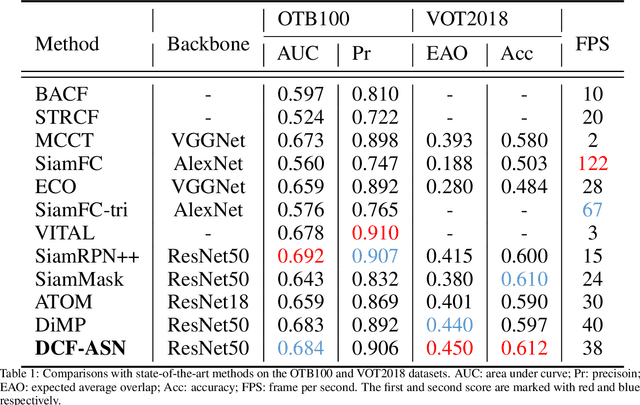
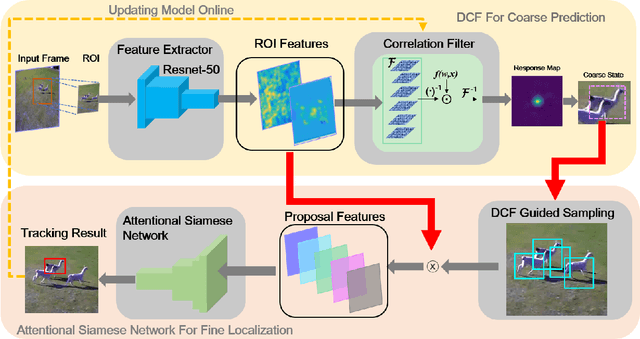

Discriminative correlation filters (DCF) and siamese networks have achieved promising performance on visual tracking tasks thanks to their superior computational efficiency and reliable similarity metric learning, respectively. However, how to effectively take advantages of powerful deep networks, while maintaining the real-time response of DCF, remains a challenging problem. Embedding the cross-correlation operator as a separate layer into siamese networks is a popular choice to enhance the tracking accuracy. Being a key component of such a network, the correlation layer is updated online together with other parts of the network. Yet, when facing serious disturbance, fused trackers may still drift away from the target completely due to accumulated errors. To address these issues, we propose a coarse-to-fine tracking framework, which roughly infers the target state via an online-updating DCF module first and subsequently, finely locates the target through an offline-training asymmetric siamese network (ASN). Benefitting from the guidance of DCF and the learned channel weights obtained through exploiting the given ground-truth template, ASN refines feature representation and implements precise target localization. Systematic experiments on five popular tracking datasets demonstrate that the proposed DCF-ASN achieves the state-of-the-art performance while exhibiting good tracking efficiency.
Knowledge Graph Based Waveform Recommendation: A New Communication Waveform Design Paradigm
Jan 24, 2022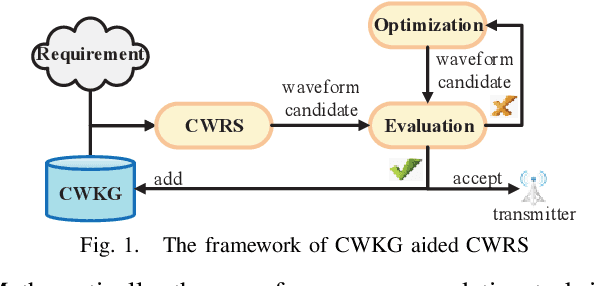
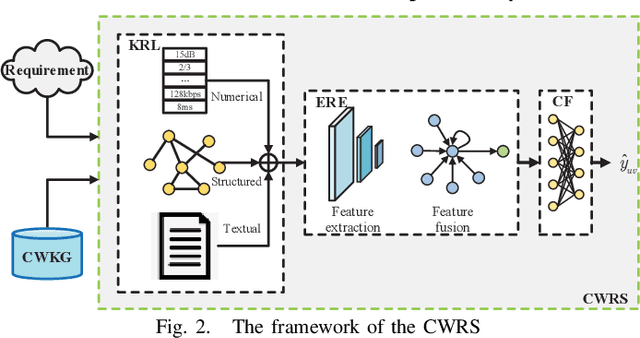
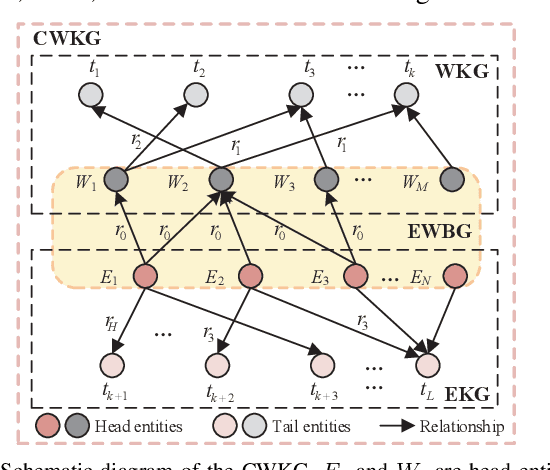
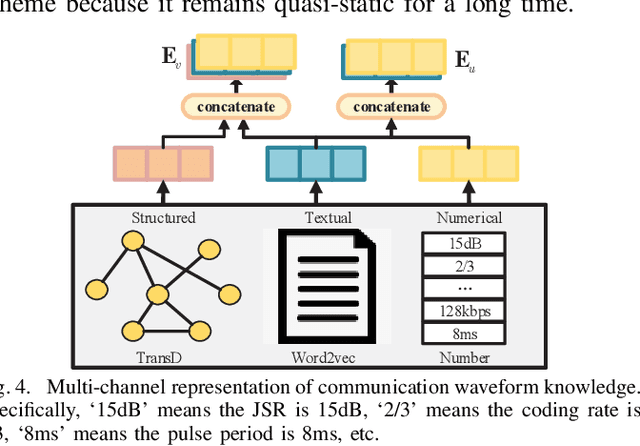
Traditionally, a communication waveform is designed by experts based on communication theory and their experiences on a case-by-case basis, which is usually laborious and time-consuming. In this paper, we investigate the waveform design from a novel perspective and propose a new waveform design paradigm with the knowledge graph (KG)-based intelligent recommendation system. The proposed paradigm aims to improve the design efficiency by structural characterization and representations of existing waveforms and intelligently utilizing the knowledge learned from them. To achieve this goal, we first build a communication waveform knowledge graph (CWKG) with a first-order neighbor node, for which both structured semantic knowledge and numerical parameters of a waveform are integrated by representation learning. Based on the developed CWKG, we further propose an intelligent communication waveform recommendation system (CWRS) to generate waveform candidates. In the CWRS, an improved involution1D operator, which is channel-agnostic and space-specific, is introduced according to the characteristics of KG-based waveform representation for feature extraction, and the multi-head self-attention is adopted to weigh the influence of various components for feature fusion. Meanwhile, multilayer perceptron-based collaborative filtering is used to evaluate the matching degree between the requirement and the waveform candidate. Simulation results show that the proposed CWKG-based CWRS can automatically recommend waveform candidates with high reliability.
A novel method for error analysis in radiation thermometry with application to industrial furnaces
Jan 10, 2022
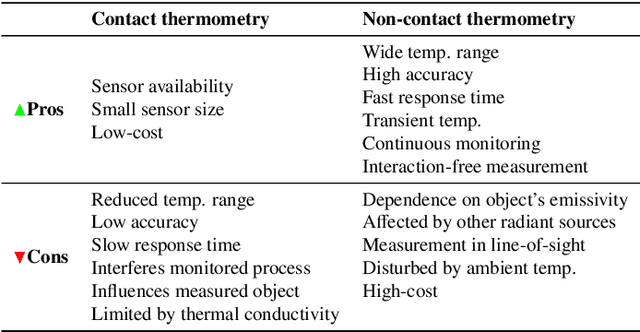
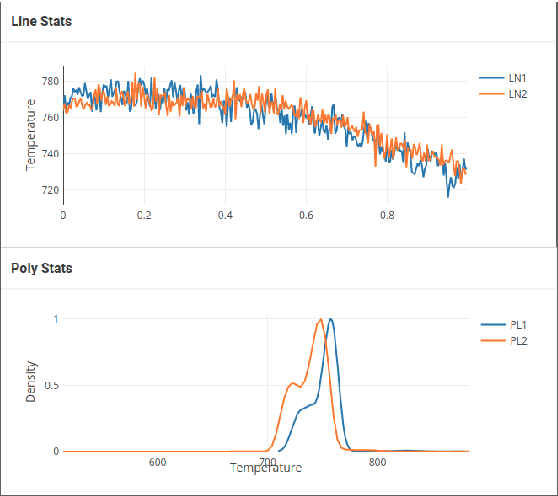
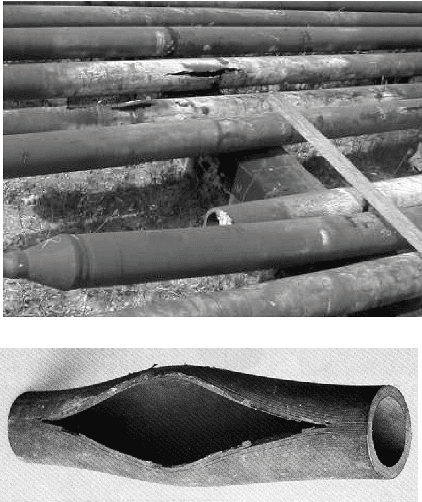
Accurate temperature measurements are essential for the proper monitoring and control of industrial furnaces. However, measurement uncertainty is a risk for such a critical parameter. Certain instrumental and environmental errors must be considered when using spectral-band radiation thermometry techniques, such as the uncertainty in the emissivity of the target surface, reflected radiation from surrounding objects, or atmospheric absorption and emission, to name a few. Undesired contributions to measured radiation can be isolated using measurement models, also known as error-correction models. This paper presents a methodology for budgeting significant sources of error and uncertainty during temperature measurements in a petrochemical furnace scenario. A continuous monitoring system is also presented, aided by a deep-learning-based measurement correction model, to allow domain experts to analyze the furnace's operation in real-time. To validate the proposed system's functionality, a real-world application case in a petrochemical plant is presented. The proposed solution demonstrates the viability of precise industrial furnace monitoring, thereby increasing operational security and improving the efficiency of such energy-intensive systems.
Cardiac and respiratory motion extraction for MRI using Pilot Tone-a patient study
Jan 31, 2022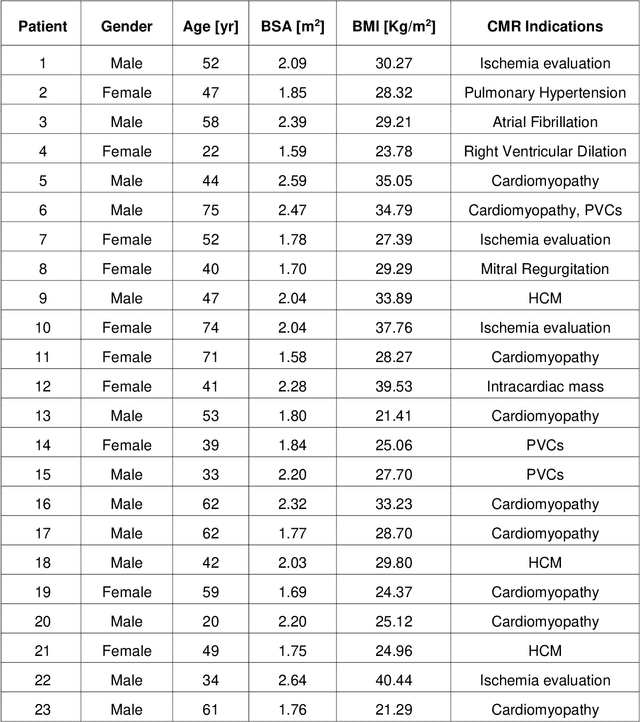
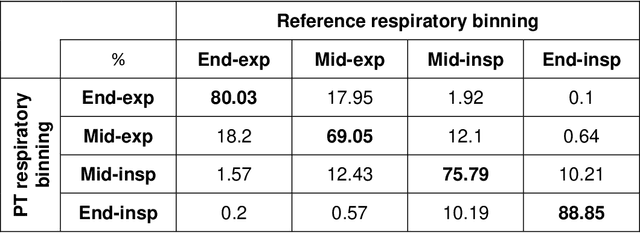
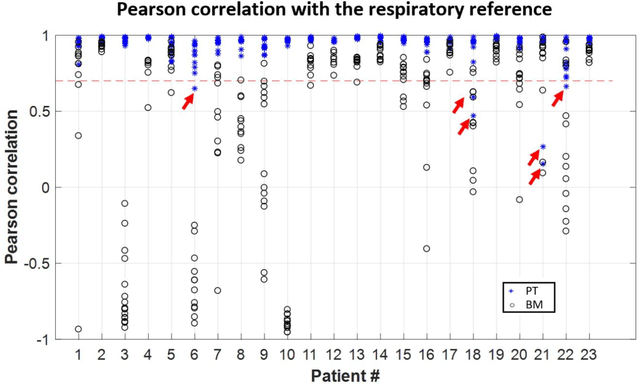
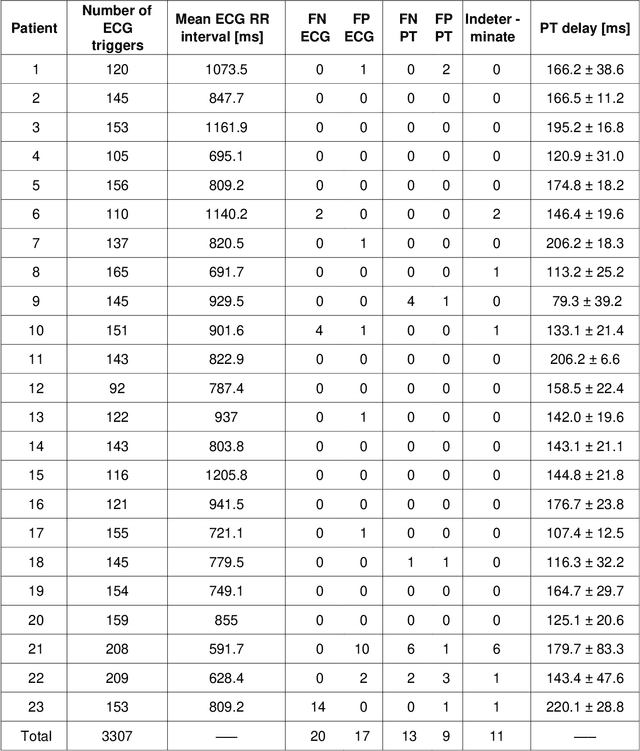
Background:The Pilot Tone (PT) technology allows contactless monitoring of physiological motion during the MRI scan. Several studies have shown that both respiratory and cardiac motion can be extracted from the PT signal successfully. However, most of these studies were performed in healthy volunteers. In this study, we seek to evaluate the accuracy and reliability of the cardiac and respiratory signals extracted from PT in patients clinically referred for cardiovascular MRI (CMR). Methods: Twenty-three patients were included in this study, each scanned under free-breathing conditions using a balanced steady-state free-precession real-time (RT) cine sequence on a 1.5T scanner. The PT signal was generated by a built-in PT transmitter integrated within the body array coil. For comparison, ECG and BioMatrix (BM) respiratory sensor signals were also synchronously recorded. To assess the performances of PT, ECG, and BM, cardiac and respiratory signals extracted from the RT cine images were used as the ground truth. Results: The respiratory motion extracted from PT correlated positively with the image-derived respiratory signal in all cases and showed a stronger correlation (absolute coefficient: 0.95-0.09) than BM (0.72-0.24). For the cardiac signal, the precision of PT-based triggers (standard deviation of PT trigger locations relative to ECG triggers) ranged from 6.6 to 81.2 ms (median 19.5 ms). Overall, the performance of PT-based trigger extraction was comparable to that of ECG. Conclusions: This study demonstrates the potential of PT to monitor both respiratory and cardiac motion in patients clinically referred for CMR.
Animal Behavior Classification via Deep Learning on Embedded Systems
Nov 24, 2021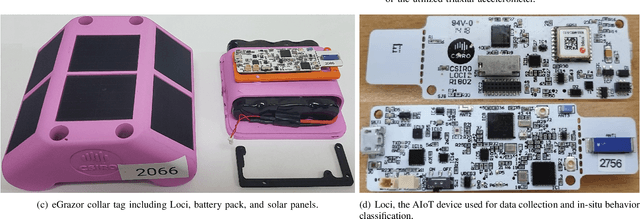
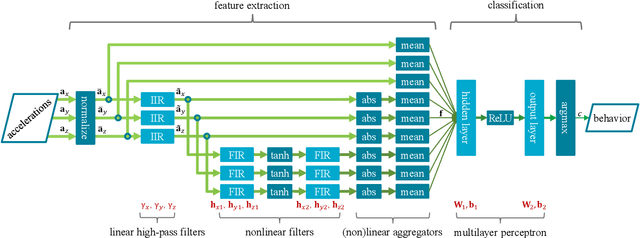
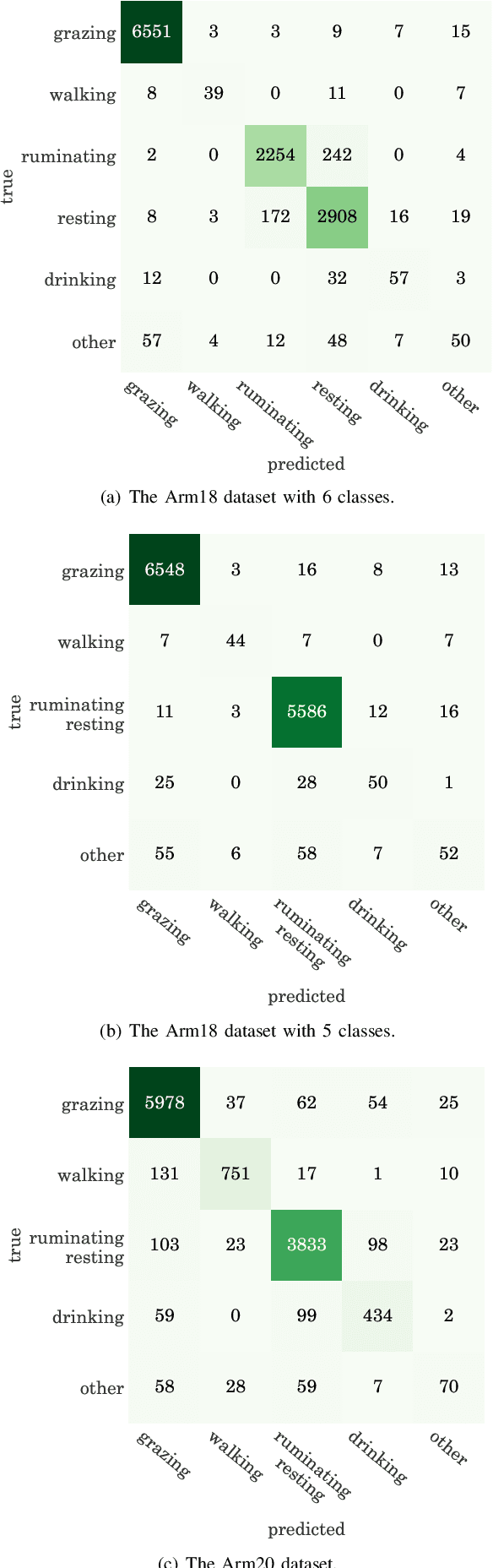
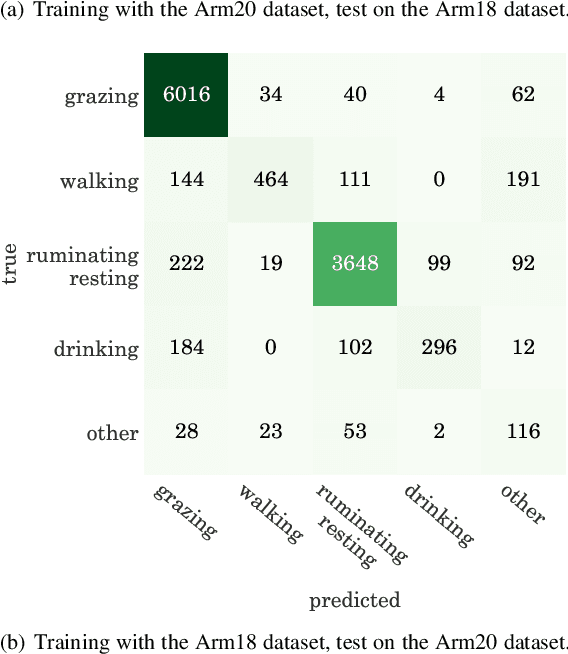
We develop an end-to-end deep-neural-network-based algorithm for classifying animal behavior using accelerometry data on the embedded system of an artificial intelligence of things (AIoT) device installed in a wearable collar tag. The proposed algorithm jointly performs feature extraction and classification utilizing a set of infinite-impulse-response (IIR) and finite-impulse-response (FIR) filters together with a multilayer perceptron. The utilized IIR and FIR filters can be viewed as specific types of recurrent and convolutional neural network layers, respectively. We evaluate the performance of the proposed algorithm via two real-world datasets collected from grazing cattle. The results show that the proposed algorithm offers good intra- and inter-dataset classification accuracy and outperforms its closest contenders including two state-of-the-art convolutional-neural-network-based time-series classification algorithms, which are significantly more complex. We implement the proposed algorithm on the embedded system of the collar tag's AIoT device to perform in-situ classification of animal behavior. We achieve real-time in-situ behavior inference from accelerometry data without imposing any strain on the available computational, memory, or energy resources of the embedded system.
Vibration Fault Diagnosis in Wind Turbines based on Automated Feature Learning
Jan 31, 2022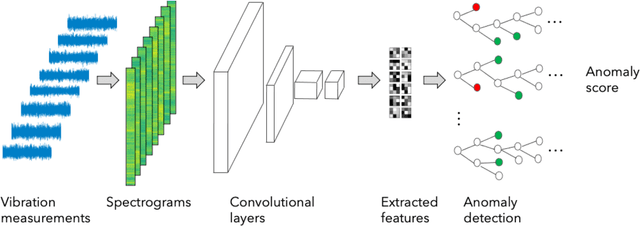
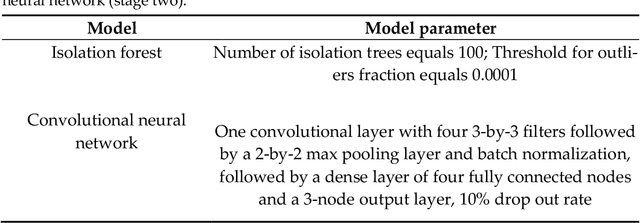
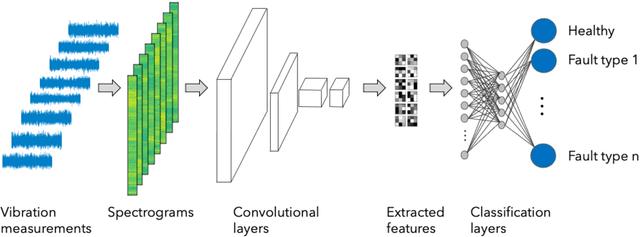
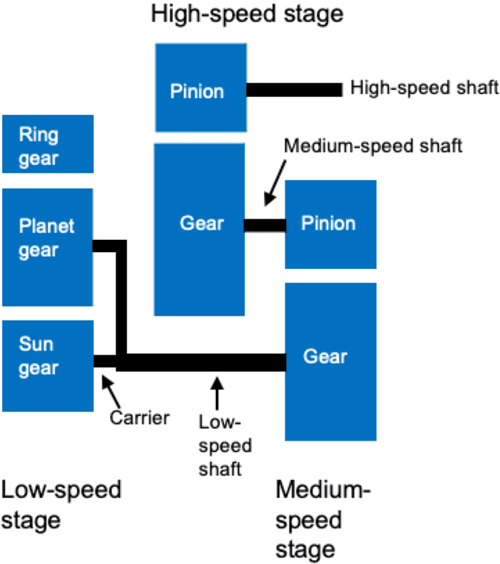
A growing number of wind turbines are equipped with vibration measurement systems to enable a close monitoring and early detection of developing fault conditions. The vibration measurements are analyzed to continuously assess the component health and prevent failures that can result in downtimes. This study focuses on gearbox monitoring but is applicable also to other subsystems. The current state-of-the-art gearbox fault diagnosis algorithms rely on statistical or machine learning methods based on fault signatures that have been defined by human analysts. This has multiple disadvantages. Defining the fault signatures by human analysts is a time-intensive process that requires highly detailed knowledge of the gearbox composition. This effort needs to be repeated for every new turbine, so it does not scale well with the increasing number of monitored turbines, especially in fast growing portfolios. Moreover, fault signatures defined by human analysts can result in biased and imprecise decision boundaries that lead to imprecise and uncertain fault diagnosis decisions. We present a novel accurate fault diagnosis method for vibration-monitored wind turbine components that overcomes these disadvantages. Our approach combines autonomous data-driven learning of fault signatures and health state classification based on convolutional neural networks and isolation forests. We demonstrate its performance with vibration measurements from two wind turbine gearboxes. Unlike the state-of-the-art methods, our approach does not require gearbox-type specific diagnosis expertise and is not restricted to predefined frequencies or spectral ranges but can monitor the full spectrum at once.
Real-Time Optimization Of Web Publisher RTB Revenues
Jun 12, 2020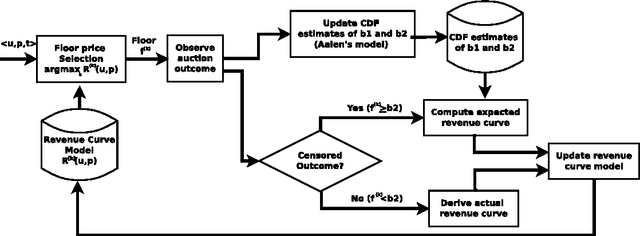
This paper describes an engine to optimize web publisher revenues from second-price auctions. These auctions are widely used to sell online ad spaces in a mechanism called real-time bidding (RTB). Optimization within these auctions is crucial for web publishers, because setting appropriate reserve prices can significantly increase revenue. We consider a practical real-world setting where the only available information before an auction occurs consists of a user identifier and an ad placement identifier. The real-world challenges we had to tackle consist mainly of tracking the dependencies on both the user and placement in an highly non-stationary environment and of dealing with censored bid observations. These challenges led us to make the following design choices: (i) we adopted a relatively simple non-parametric regression model of auction revenue based on an incremental time-weighted matrix factorization which implicitly builds adaptive users' and placements' profiles; (ii) we jointly used a non-parametric model to estimate the first and second bids' distribution when they are censored, based on an on-line extension of the Aalen's Additive model. Our engine is a component of a deployed system handling hundreds of web publishers across the world, serving billions of ads a day to hundreds of millions of visitors. The engine is able to predict, for each auction, an optimal reserve price in approximately one millisecond and yields a significant revenue increase for the web publishers.
Gait Recognition Based on Deep Learning: A Survey
Jan 10, 2022
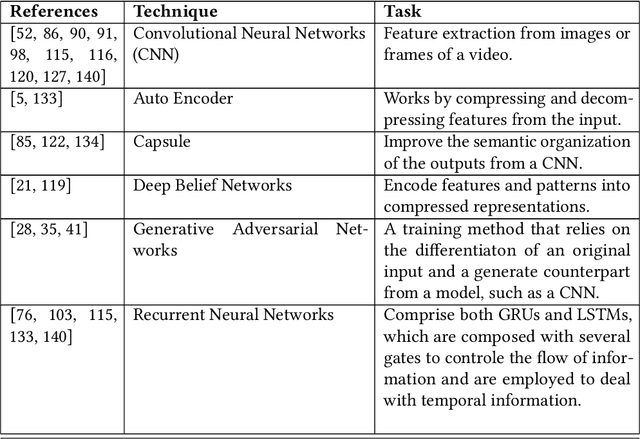
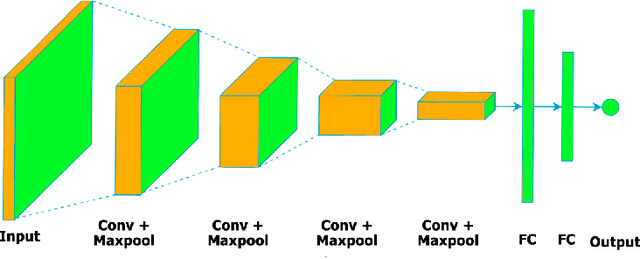
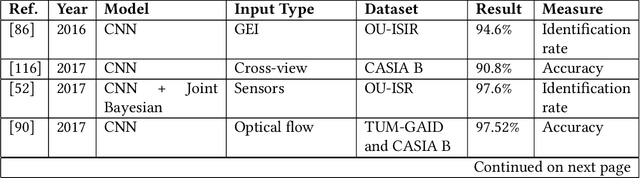
In general, biometry-based control systems may not rely on individual expected behavior or cooperation to operate appropriately. Instead, such systems should be aware of malicious procedures for unauthorized access attempts. Some works available in the literature suggest addressing the problem through gait recognition approaches. Such methods aim at identifying human beings through intrinsic perceptible features, despite dressed clothes or accessories. Although the issue denotes a relatively long-time challenge, most of the techniques developed to handle the problem present several drawbacks related to feature extraction and low classification rates, among other issues. However, deep learning-based approaches recently emerged as a robust set of tools to deal with virtually any image and computer-vision related problem, providing paramount results for gait recognition as well. Therefore, this work provides a surveyed compilation of recent works regarding biometric detection through gait recognition with a focus on deep learning approaches, emphasizing their benefits, and exposing their weaknesses. Besides, it also presents categorized and characterized descriptions of the datasets, approaches, and architectures employed to tackle associated constraints.
A Machine Learning Approach for Material Type Logging and Chemical Assaying from Autonomous Measure-While-Drilling (MWD) Data
Feb 07, 2022
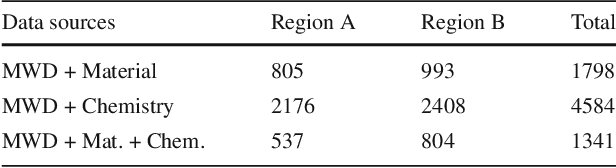
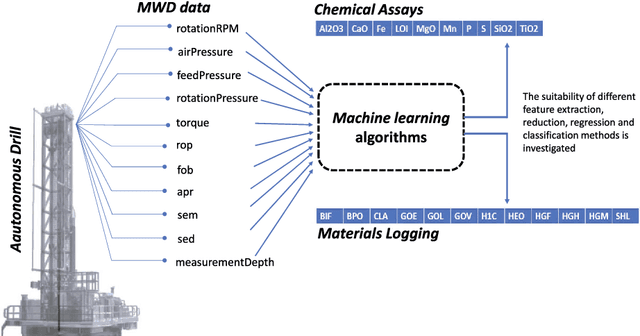
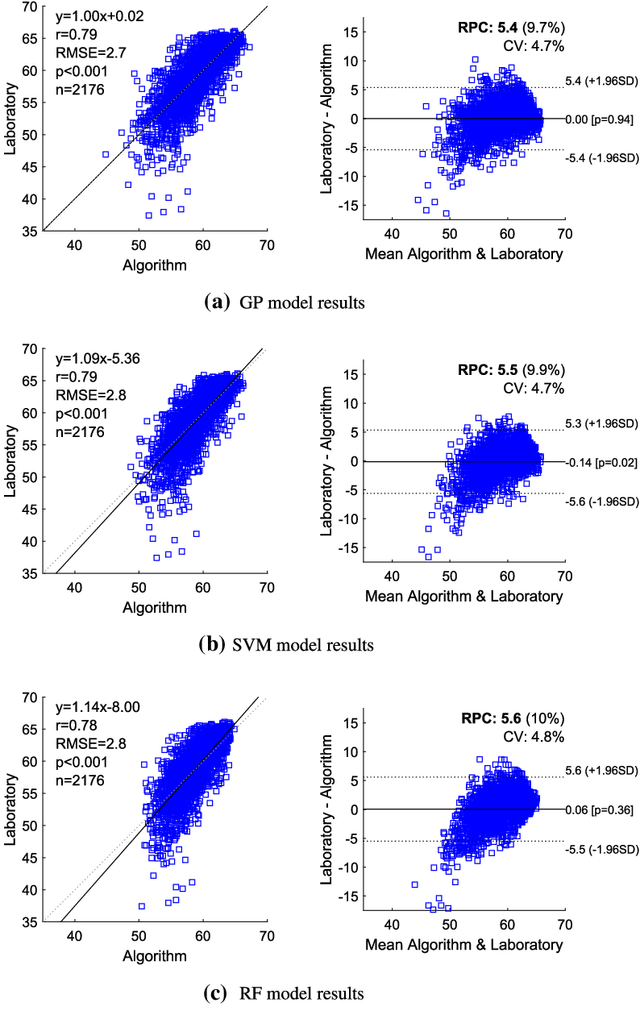
Understanding the structure and mineralogical composition of a region is an essential step in mining, both during exploration (before mining) and in the mining process. During exploration, sparse but high-quality data are gathered to assess the overall orebody. During the mining process, boundary positions and material properties are refined as the mine progresses. This refinement is facilitated through drilling, material logging, and chemical assaying. Material type logging suffers from a high degree of variability due to factors such as the diversity in mineralization and geology, the subjective nature of human measurement even by experts, and human error in manually recording results. While laboratory-based chemical assaying is much more precise, it is time-consuming and costly and does not always capture or correlate boundary positions between all material types. This leads to significant challenges and financial implications for the industry, as the accuracy of production blasthole logging and assaying processes is essential for resource evaluation, planning, and execution of mine plans. To overcome these challenges, this work reports on a pilot study to automate the process of material logging and chemical assaying. A machine learning approach has been trained on features extracted from measurement-while-drilling (MWD) data, logged from autonomous drilling systems (ADS). MWD data facilitate the construction of profiles of physical drilling parameters as a function of hole depth. A hypothesis is formed to link these drilling parameters to the underlying mineral composition. The results of the pilot study discussed in this paper demonstrate the feasibility of this process, with correlation coefficients of up to 0.92 for chemical assays and 93% accuracy for material detection, depending on the material or assay type and their generalization across the different spatial regions.
* 29 pages, 19 figures, mathematical geosciences, Rio Tinto Centre for Mine Automation