 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
MCDS: AI Augmented Workflow Scheduling in Mobile Edge Cloud Computing Systems
Dec 14, 2021
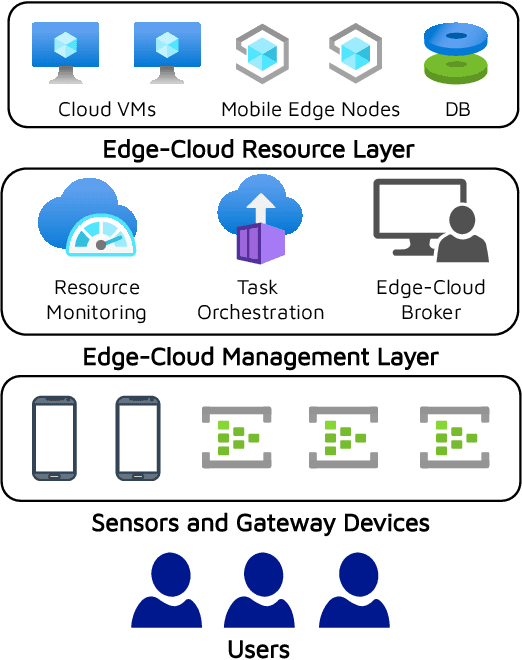
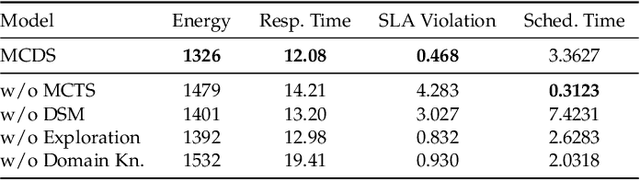
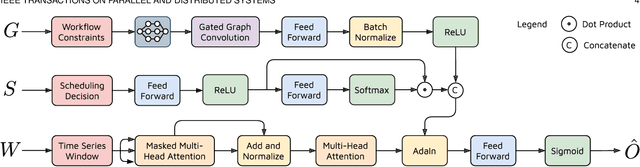
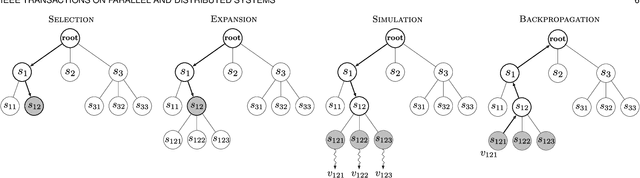
Workflow scheduling is a long-studied problem in parallel and distributed computing (PDC), aiming to efficiently utilize compute resources to meet user's service requirements. Recently proposed scheduling methods leverage the low response times of edge computing platforms to optimize application Quality of Service (QoS). However, scheduling workflow applications in mobile edge-cloud systems is challenging due to computational heterogeneity, changing latencies of mobile devices and the volatile nature of workload resource requirements. To overcome these difficulties, it is essential, but at the same time challenging, to develop a long-sighted optimization scheme that efficiently models the QoS objectives. In this work, we propose MCDS: Monte Carlo Learning using Deep Surrogate Models to efficiently schedule workflow applications in mobile edge-cloud computing systems. MCDS is an Artificial Intelligence (AI) based scheduling approach that uses a tree-based search strategy and a deep neural network-based surrogate model to estimate the long-term QoS impact of immediate actions for robust optimization of scheduling decisions. Experiments on physical and simulated edge-cloud testbeds show that MCDS can improve over the state-of-the-art methods in terms of energy consumption, response time, SLA violations and cost by at least 6.13, 4.56, 45.09 and 30.71 percent respectively.
Splatting-based Synthesis for Video Frame Interpolation
Jan 25, 2022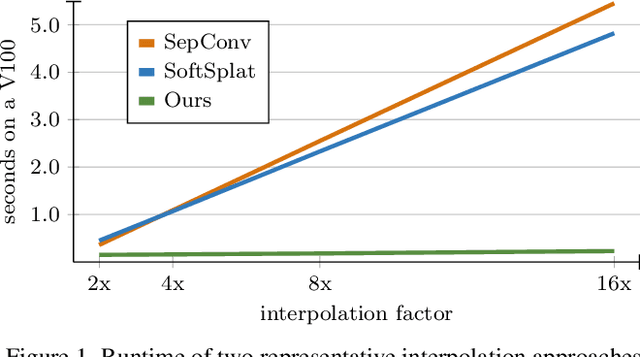
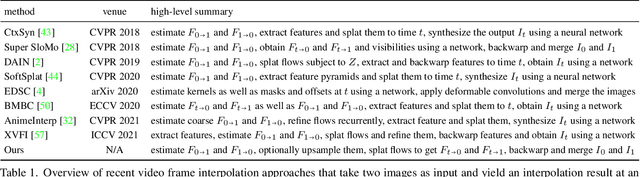

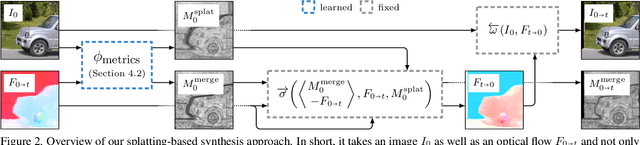
Frame interpolation is an essential video processing technique that adjusts the temporal resolution of an image sequence. An effective approach to perform frame interpolation is based on splatting, also known as forward warping. Specifically, splatting can be used to warp the input images to an arbitrary temporal location based on an optical flow estimate. A synthesis network, also sometimes referred to as refinement network, can then be used to generate the output frame from the warped images. In doing so, it is common to not only warp the images but also various feature representations which provide rich contextual cues to the synthesis network. However, while this approach has been shown to work well and enables arbitrary-time interpolation due to using splatting, the involved synthesis network is prohibitively slow. In contrast, we propose to solely rely on splatting to synthesize the output without any subsequent refinement. This splatting-based synthesis is much faster than similar approaches, especially for multi-frame interpolation, while enabling new state-of-the-art results at high resolutions.
Measuring Wind Turbine Health Using Drifting Concepts
Dec 09, 2021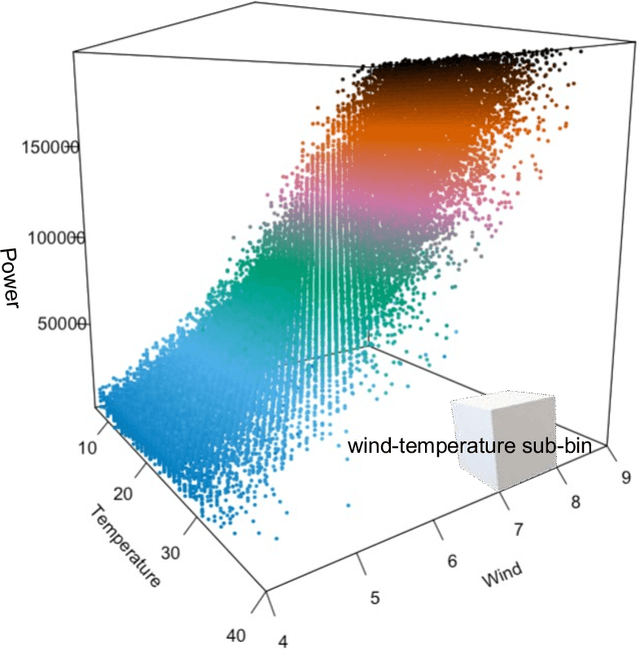
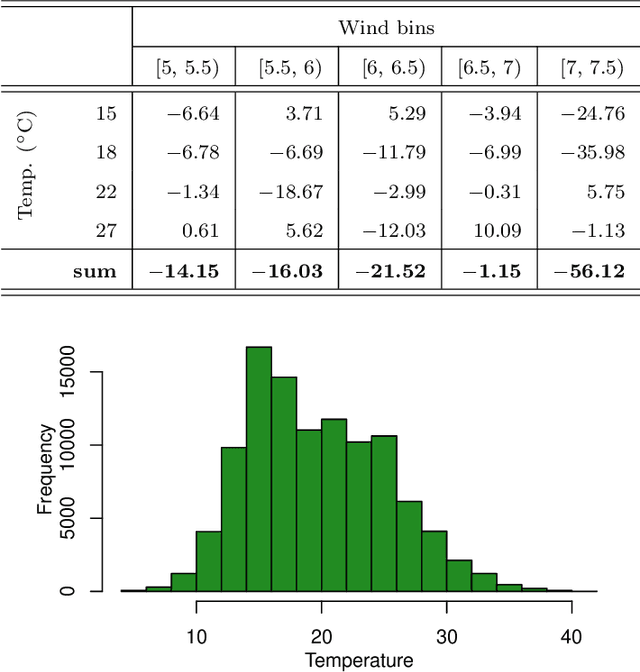
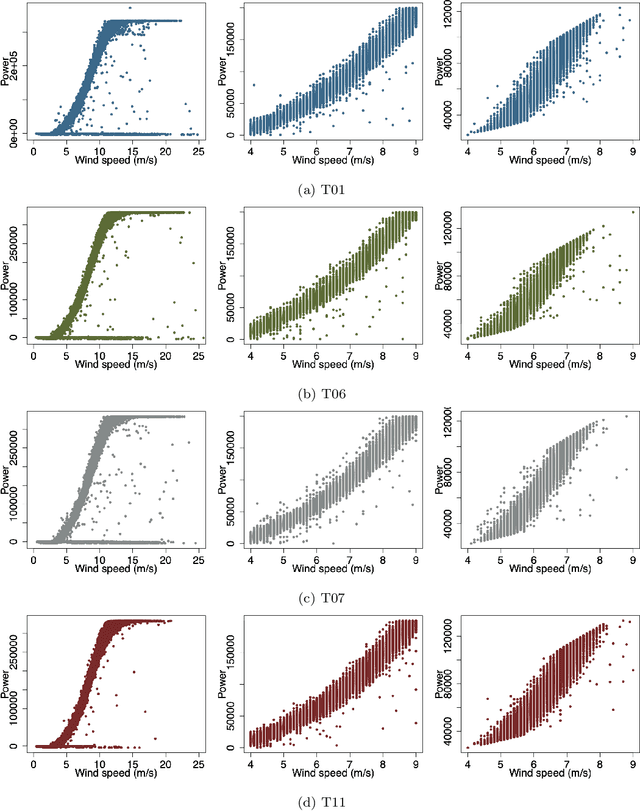
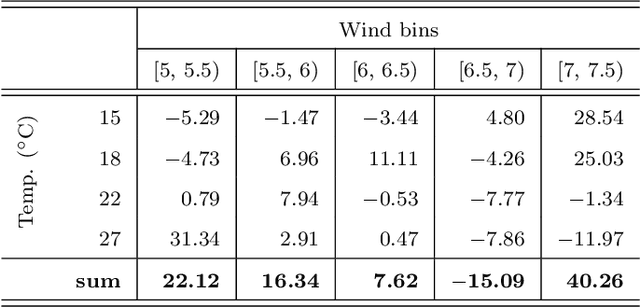
Time series processing is an essential aspect of wind turbine health monitoring. Despite the progress in this field, there is still room for new methods to improve modeling quality. In this paper, we propose two new approaches for the analysis of wind turbine health. Both approaches are based on abstract concepts, implemented using fuzzy sets, which summarize and aggregate the underlying raw data. By observing the change in concepts, we infer about the change in the turbine's health. Analyzes are carried out separately for different external conditions (wind speed and temperature). We extract concepts that represent relative low, moderate, and high power production. The first method aims at evaluating the decrease or increase in relatively high and low power production. This task is performed using a regression-like model. The second method evaluates the overall drift of the extracted concepts. Large drift indicates that the power production process undergoes fluctuations in time. Concepts are labeled using linguistic labels, thus equipping our model with improved interpretability features. We applied the proposed approach to process publicly available data describing four wind turbines. The simulation results have shown that the aging process is not homogeneous in all wind turbines.
Efficient, Anytime Algorithms for Calibration with Isotonic Regression under Strictly Convex Losses
Oct 31, 2021We investigate the calibration of estimations to increase performance with an optimal monotone transform on the estimator outputs. We start by studying the traditional square error setting with its weighted variant and show that the optimal monotone transform is in the form of a unique staircase function. We further show that this staircase behavior is preserved for general strictly convex loss functions. Their optimal monotone transforms are also unique, i.e., there exist a single staircase transform that achieves the minimum loss. We propose a linear time and space algorithm that can find such optimal transforms for specific loss settings. Our algorithm has an online implementation where the optimal transform for the samples observed so far are found in linear space and amortized time when the samples arrive in an ordered fashion. We also extend our results to cases where the functions are not trivial to individually optimize and propose an anytime algorithm, which has linear space and pseudo-linearithmic time complexity.
A Lightweight, Efficient and Explainable-by-Design Convolutional Neural Network for Internet Traffic Classification
Feb 11, 2022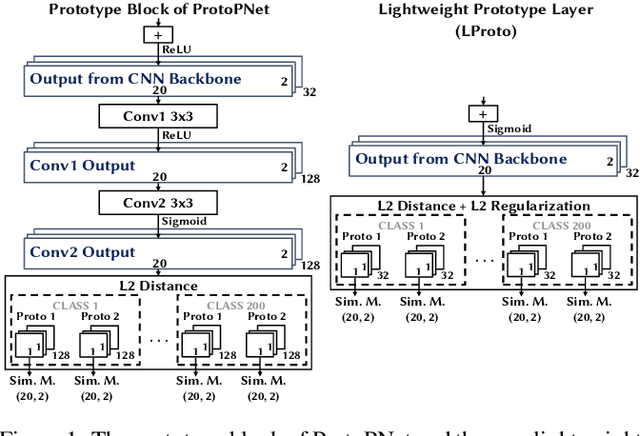
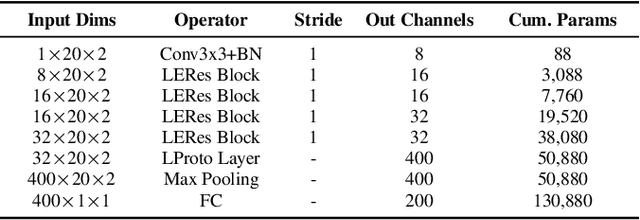
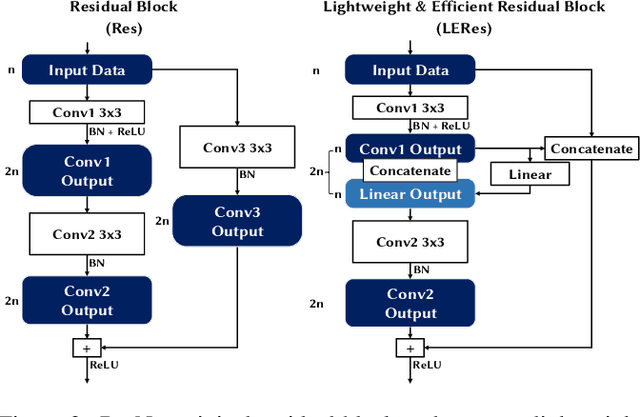
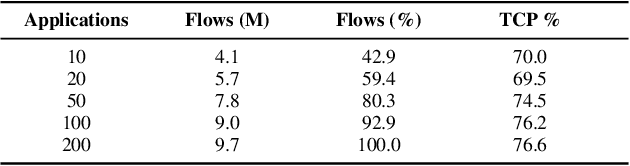
Traffic classification, i.e. the identification of the type of applications flowing in a network, is a strategic task for numerous activities (e.g., intrusion detection, routing). This task faces some critical challenges that current deep learning approaches do not address. The design of current approaches do not take into consideration the fact that networking hardware (e.g., routers) often runs with limited computational resources. Further, they do not meet the need for faithful explainability highlighted by regulatory bodies. Finally, these traffic classifiers are evaluated on small datasets which fail to reflect the diversity of applications in real commercial settings. Therefore, this paper introduces a Lightweight, Efficient and eXplainable-by-design convolutional neural network (LEXNet) for Internet traffic classification, which relies on a new residual block (for lightweight and efficiency purposes) and prototype layer (for explainability). Based on a commercial-grade dataset, our evaluation shows that LEXNet succeeds to maintain the same accuracy as the best performing state-of-the-art neural network, while providing the additional features previously mentioned. Moreover, we demonstrate that LEXNet significantly reduces the model size and inference time compared to the state-of-the-art neural networks with explainability-by-design and post hoc explainability methods. Finally, we illustrate the explainability feature of our approach, which stems from the communication of detected application prototypes to the end-user, and we highlight the faithfulness of LEXNet explanations through a comparison with post hoc methods.
Introducing explainable supervised machine learning into interactive feedback loops for statistical production system
Feb 07, 2022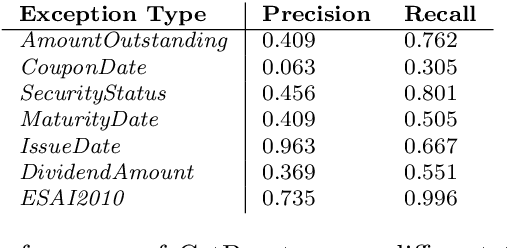
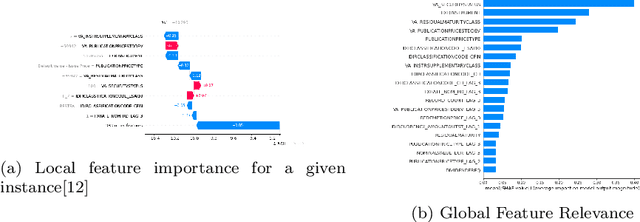
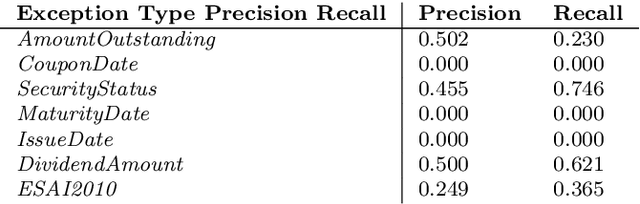
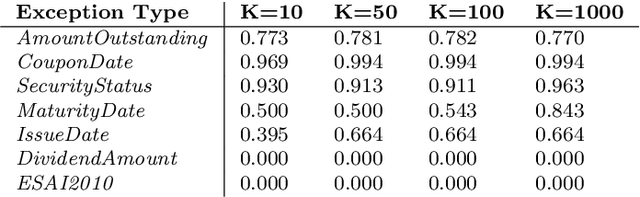
Statistical production systems cover multiple steps from the collection, aggregation, and integration of data to tasks like data quality assurance and dissemination. While the context of data quality assurance is one of the most promising fields for applying machine learning, the lack of curated and labeled training data is often a limiting factor. The statistical production system for the Centralised Securities Database features an interactive feedback loop between data collected by the European Central Bank and data quality assurance performed by data quality managers at National Central Banks. The quality assurance feedback loop is based on a set of rule-based checks for raising exceptions, upon which the user either confirms the data or corrects an actual error. In this paper we use the information received from this feedback loop to optimize the exceptions presented to the National Central Banks thereby improving the quality of exceptions generated and the time consumed on the system by the users authenticating those exceptions. For this approach we make use of explainable supervised machine learning to (a) identify the types of exceptions and (b) to prioritize which exceptions are more likely to require an intervention or correction by the NCBs. Furthermore, we provide an explainable AI taxonomy aiming to identify the different explainable AI needs that arose during the project.
MSHT: Multi-stage Hybrid Transformer for the ROSE Image Analysis of Pancreatic Cancer
Dec 27, 2021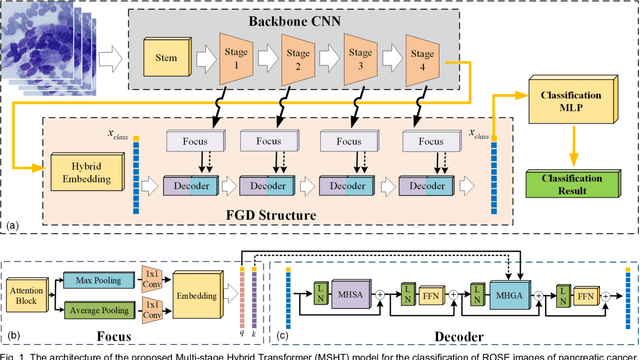
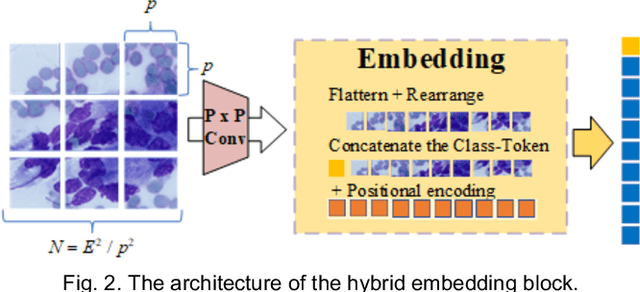
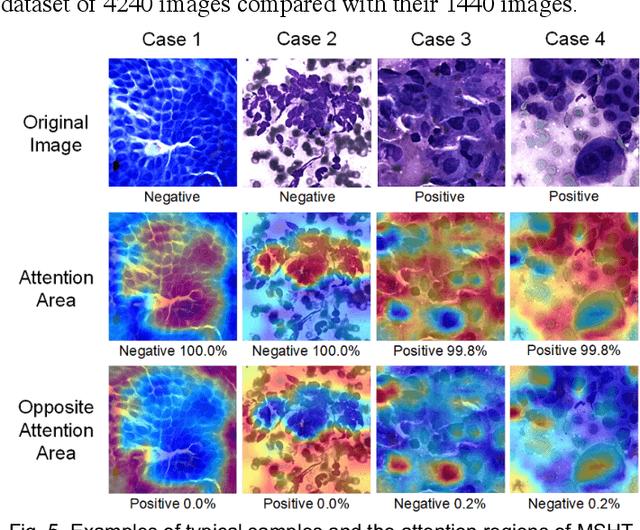
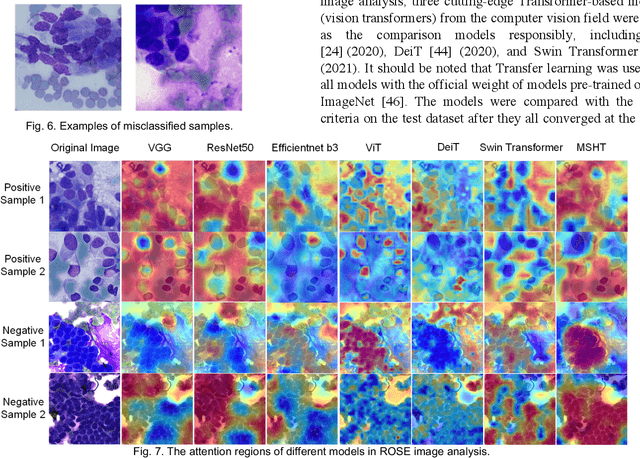
Pancreatic cancer is one of the most malignant cancers in the world, which deteriorates rapidly with very high mortality. The rapid on-site evaluation (ROSE) technique innovates the workflow by immediately analyzing the fast stained cytopathological images with on-site pathologists, which enables faster diagnosis in this time-pressured process. However, the wider expansion of ROSE diagnosis has been hindered by the lack of experienced pathologists. To overcome this problem, we propose a hybrid high-performance deep learning model to enable the automated workflow, thus freeing the occupation of the valuable time of pathologists. By firstly introducing the Transformer block into this field with our particular multi-stage hybrid design, the spatial features generated by the convolutional neural network (CNN) significantly enhance the Transformer global modeling. Turning multi-stage spatial features as global attention guidance, this design combines the robustness from the inductive bias of CNN with the sophisticated global modeling power of Transformer. A dataset of 4240 ROSE images is collected to evaluate the method in this unexplored field. The proposed multi-stage hybrid Transformer (MSHT) achieves 95.68% in classification accuracy, which is distinctively higher than the state-of-the-art models. Facing the need for interpretability, MSHT outperforms its counterparts with more accurate attention regions. The results demonstrate that the MSHT can distinguish cancer samples accurately at an unprecedented image scale, laying the foundation for deploying automatic decision systems and enabling the expansion of ROSE in clinical practice. The code and records are available at: https://github.com/sagizty/Multi-Stage-Hybrid-Transformer.
Towards the automated large-scale reconstruction of past road networks from historical maps
Feb 11, 2022

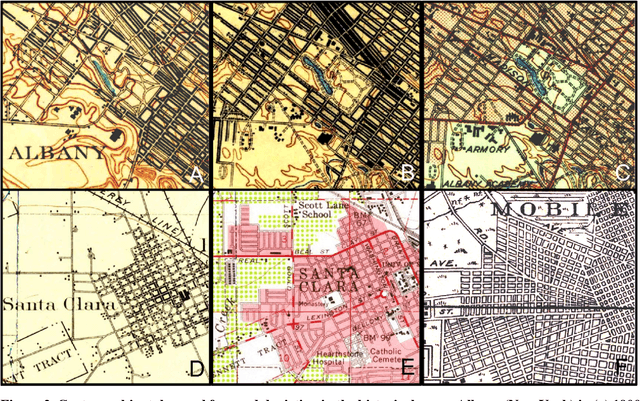
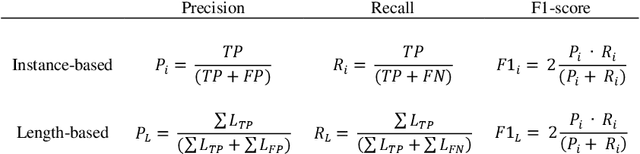
Transportation infrastructure, such as road or railroad networks, represent a fundamental component of our civilization. For sustainable planning and informed decision making, a thorough understanding of the long-term evolution of transportation infrastructure such as road networks is crucial. However, spatially explicit, multi-temporal road network data covering large spatial extents are scarce and rarely available prior to the 2000s. Herein, we propose a framework that employs increasingly available scanned and georeferenced historical map series to reconstruct past road networks, by integrating abundant, contemporary road network data and color information extracted from historical maps. Specifically, our method uses contemporary road segments as analytical units and extracts historical roads by inferring their existence in historical map series based on image processing and clustering techniques. We tested our method on over 300,000 road segments representing more than 50,000 km of the road network in the United States, extending across three study areas that cover 53 historical topographic map sheets dated between 1890 and 1950. We evaluated our approach by comparison to other historical datasets and against manually created reference data, achieving F-1 scores of up to 0.95, and showed that the extracted road network statistics are highly plausible over time, i.e., following general growth patterns. We demonstrated that contemporary geospatial data integrated with information extracted from historical map series open up new avenues for the quantitative analysis of long-term urbanization processes and landscape changes far beyond the era of operational remote sensing and digital cartography.
Real-Time Navigation System for a Low-Cost Mobile Robot with an RGB-D Camera
Mar 04, 2021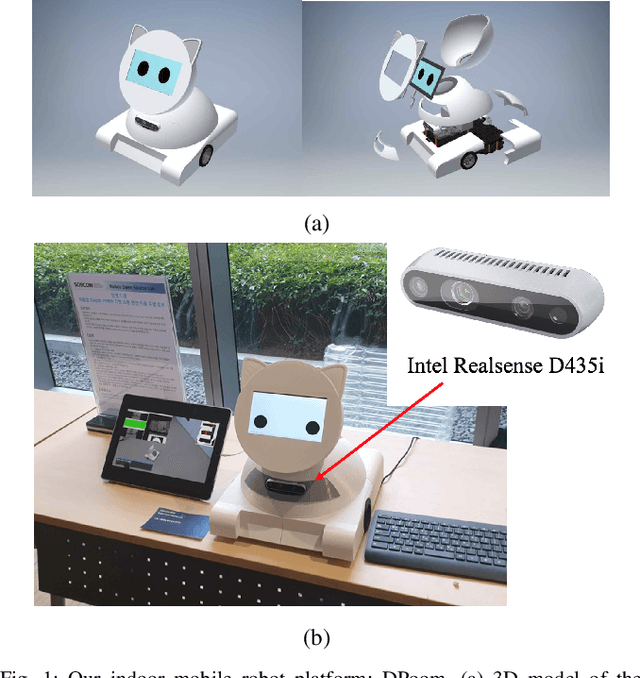
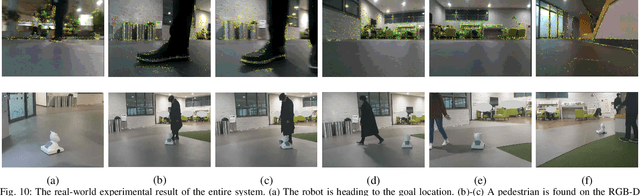
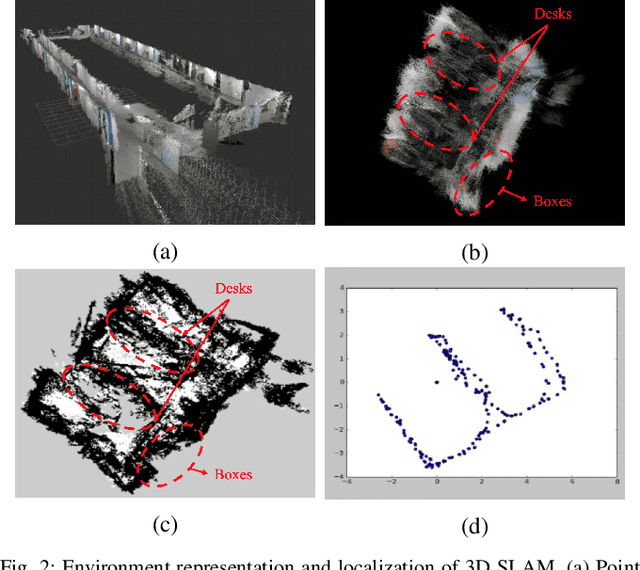
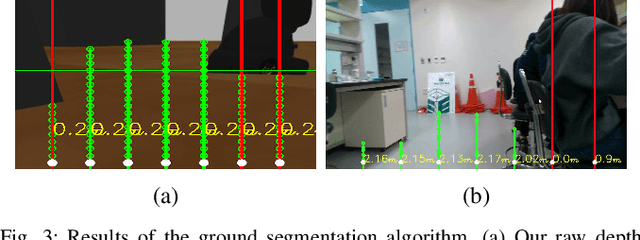
Currently, mobile robots are developing rapidly and are finding numerous applications in industry. However, there remain a number of problems related to their practical use, such as the need for expensive hardware and their high power consumption levels. In this study, we propose a navigation system that is operable on a low-end computer with an RGB-D camera and a mobile robot platform for the operation of an integrated autonomous driving system. The proposed system does not require LiDARs or a GPU. Our raw depth image ground segmentation approach extracts a traversability map for the safe driving of low-body mobile robots. It is designed to guarantee real-time performance on a low-cost commercial single board computer with integrated SLAM, global path planning, and motion planning. Running sensor data processing and other autonomous driving functions simultaneously, our navigation method performs rapidly at a refresh rate of 18Hz for control command, whereas other systems have slower refresh rates. Our method outperforms current state-of-the-art navigation approaches as shown in 3D simulation tests. In addition, we demonstrate the applicability of our mobile robot system through successful autonomous driving in a residential lobby.
The Effects of Reward Misspecification: Mapping and Mitigating Misaligned Models
Jan 10, 2022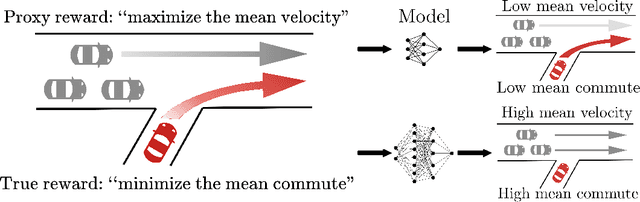
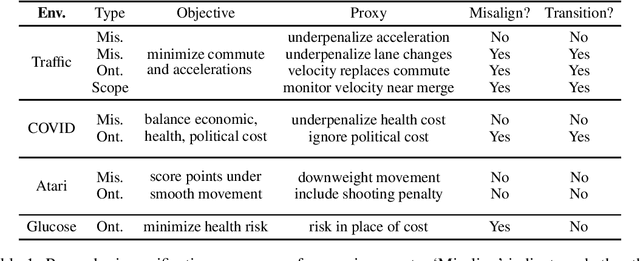
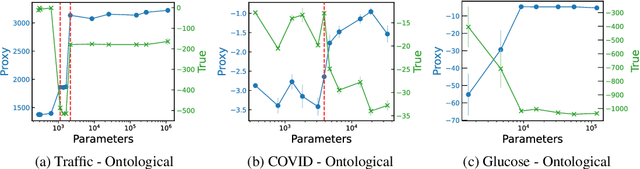
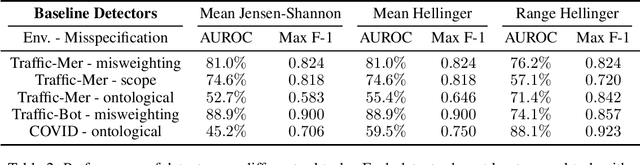
Reward hacking -- where RL agents exploit gaps in misspecified reward functions -- has been widely observed, but not yet systematically studied. To understand how reward hacking arises, we construct four RL environments with misspecified rewards. We investigate reward hacking as a function of agent capabilities: model capacity, action space resolution, observation space noise, and training time. More capable agents often exploit reward misspecifications, achieving higher proxy reward and lower true reward than less capable agents. Moreover, we find instances of phase transitions: capability thresholds at which the agent's behavior qualitatively shifts, leading to a sharp decrease in the true reward. Such phase transitions pose challenges to monitoring the safety of ML systems. To address this, we propose an anomaly detection task for aberrant policies and offer several baseline detectors.