 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Surveying 5G Techno-Economic Research to Inform the Evaluation of 6G Wireless Technologies
Jan 10, 2022
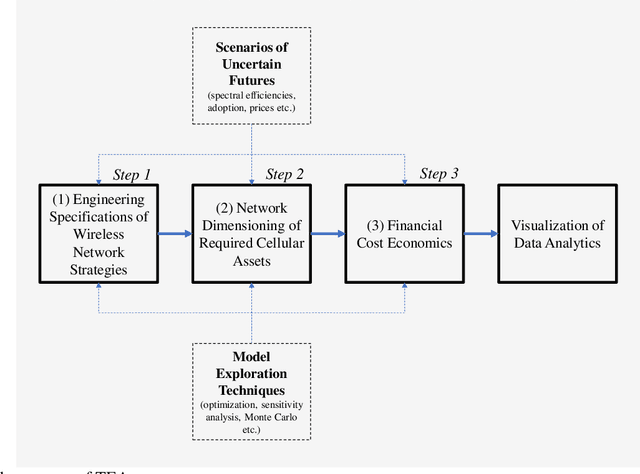
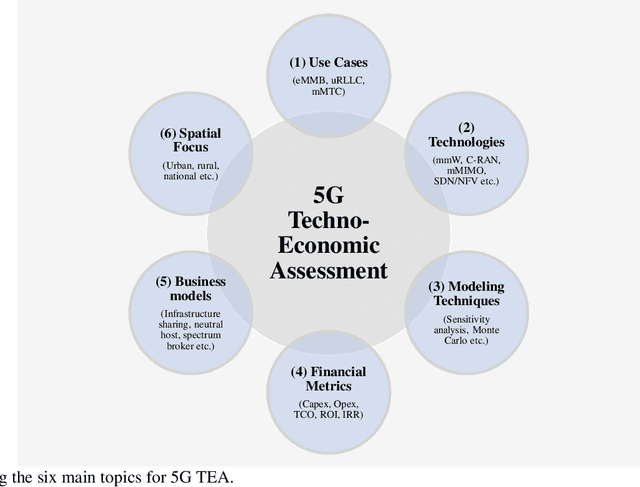
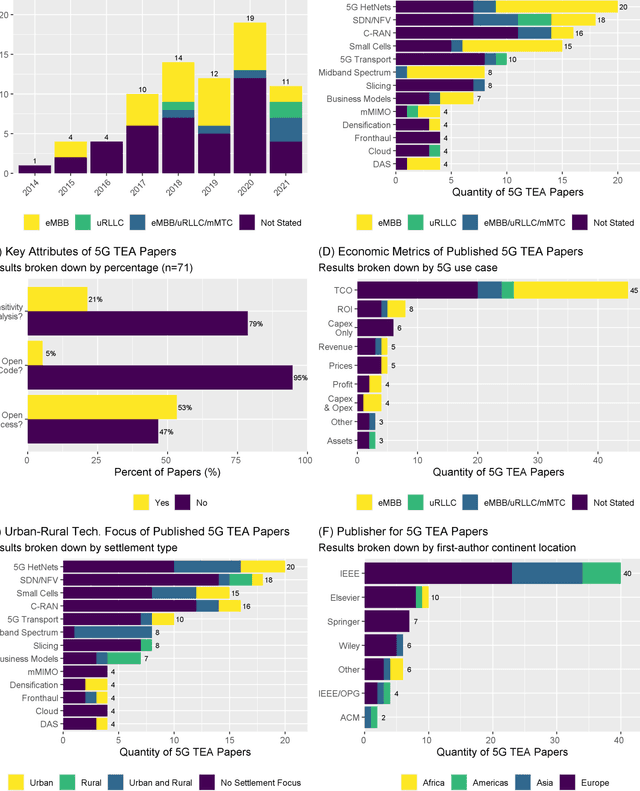
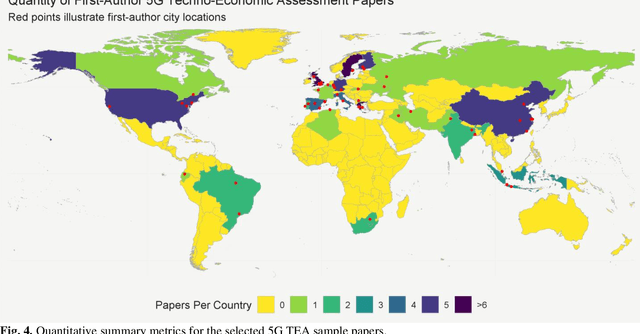
Techno-economic assessment is a fundamental technique engineers use for evaluating new communications technologies. However, despite the techno-economics of the fifth cellular generation (5G) being an active research area, it is surprising there are few comprehensive evaluations of this growing literature. With mobile network operators deploying 5G across their networks, it is therefore an opportune time to appraise current accomplishments and review the state-of-the-art. Such insight can inform the flurry of 6G research papers currently underway and help engineers in their mission to provide affordable high-capacity, low-latency broadband connectivity, globally. The survey discusses emerging trends from the 5G techno-economic literature and makes five key recommendations for the design and standardization of Next Generation 6G wireless technologies.
Graph Neural Network for Cell Tracking in Microscopy Videos
Feb 09, 2022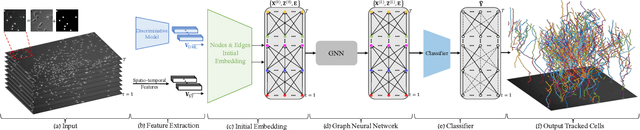
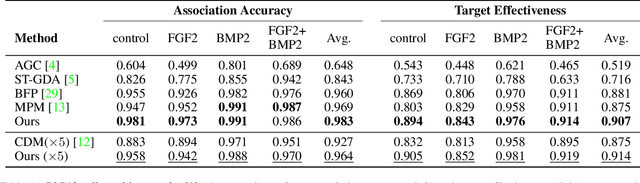
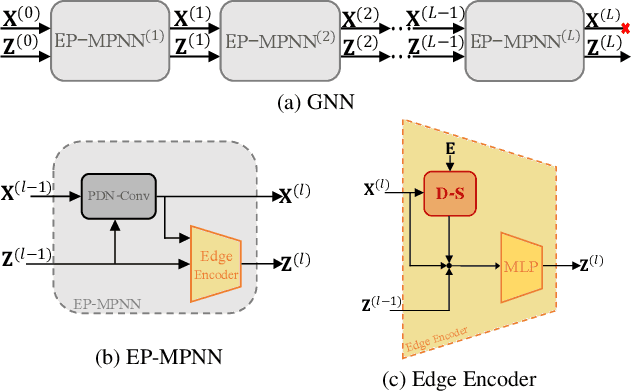
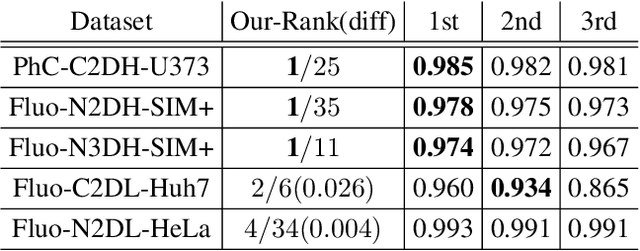
We present a novel graph neural network (GNN) approach for cell tracking in high-throughput microscopy videos. By modeling the entire time-lapse sequence as a direct graph where cell instances are represented by its nodes and their associations by its edges, we extract the entire set of cell trajectories by looking for the maximal paths in the graph. This is accomplished by several key contributions incorporated into an end-to-end deep learning framework. We exploit a deep metric learning algorithm to extract cell feature vectors that distinguish between instances of different biological cells and assemble same cell instances. We introduce a new GNN block type which enables a mutual update of node and edge feature vectors, thus facilitating the underlying message passing process. The message passing concept, whose extent is determined by the number of GNN blocks, is of fundamental importance as it enables the `flow' of information between nodes and edges much behind their neighbors in consecutive frames. Finally, we solve an edge classification problem and use the identified active edges to construct the cells' tracks and lineage trees. We demonstrate the strengths of the proposed cell tracking approach by applying it to 2D and 3D datasets of different cell types, imaging setups, and experimental conditions. We show that our framework outperforms most of the current state-of-the-art methods.
Terrain parameter estimation from proprioceptive sensing of the suspension dynamics in offroad vehicles
Feb 09, 2022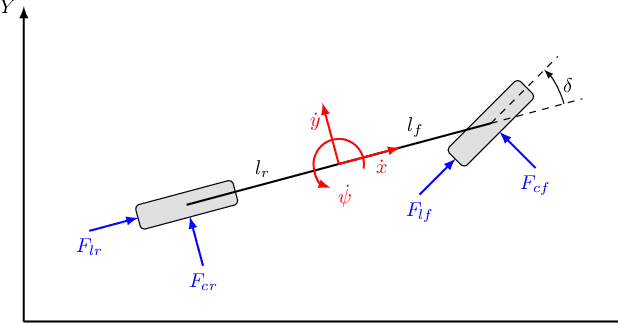
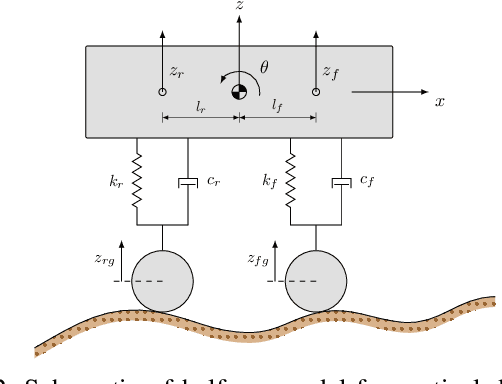
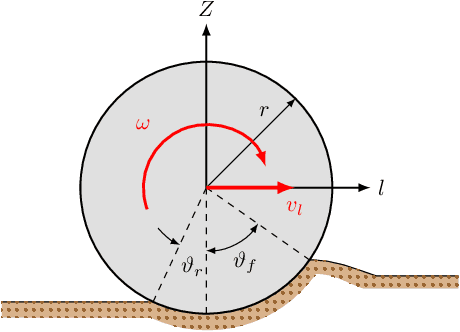
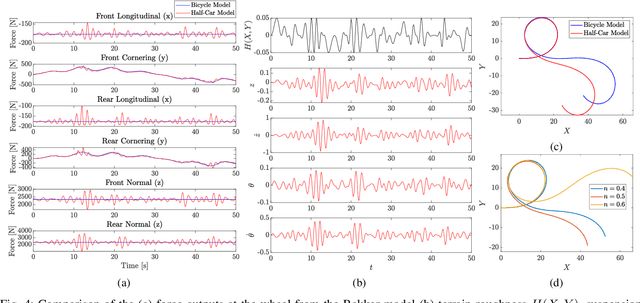
Offroad vehicle movement has to contend with uneven and uncertain terrain which present challenges to path planning and motion control for both manned and unmanned ground vehicles. Knowledge of terrain properties can allow a vehicle to adapt its control and motion planning algorithms. Terrain properties, however, can change on time scales of days or even hours, necessitating their online estimation. The kinematics and, in particular the oscillations experienced by an offroad vehicle carry a signature of the terrain properties. These terrain properties can thus be estimated from proprioceptive sensing of the vehicle dynamics with an appropriate model and estimation algorithm. In this paper, we show that knowledge of the vertical dynamics of a vehicle due to its suspension can enable faster and more accurate estimation of terrain parameters. The paper considers a five degree of freedom model that combines the well known half-car and bicycle models. We show through simulation that the sinkage exponent, a parameter that can significantly influence the wheel forces from the terrain and thus greatly impact the vehicle trajectory, can be estimated from measurements of the vehicle's linear acceleration and rotational velocity, which can be readily obtained from an onboard IMU. We show that modelling the vertical vehicle dynamics can lead to significant improvement in both the estimation of terrain parameters and the prediction of the vehicle trajectory.
Control Theoretic Analysis of Temporal Difference Learning
Jan 13, 2022The goal of this paper is to investigate a control theoretic analysis of linear stochastic iterative algorithm and temporal difference (TD) learning. TD-learning is a linear stochastic iterative algorithm to estimate the value function of a given policy for a Markov decision process, which is one of the most popular and fundamental reinforcement learning algorithms. While there has been a series of successful works in theoretical analysis of TD-learning, it was not until recently that researchers found some guarantees on its statistical efficiency. In this paper, we propose a control theoretic finite-time analysis TD-learning, which exploits standard notions in linear system control communities. Therefore, the proposed work provides additional insights on TD-learning and reinforcement learning with simple concepts and analysis tools in control theory.
Fast Moving Natural Evolution Strategy for High-Dimensional Problems
Jan 27, 2022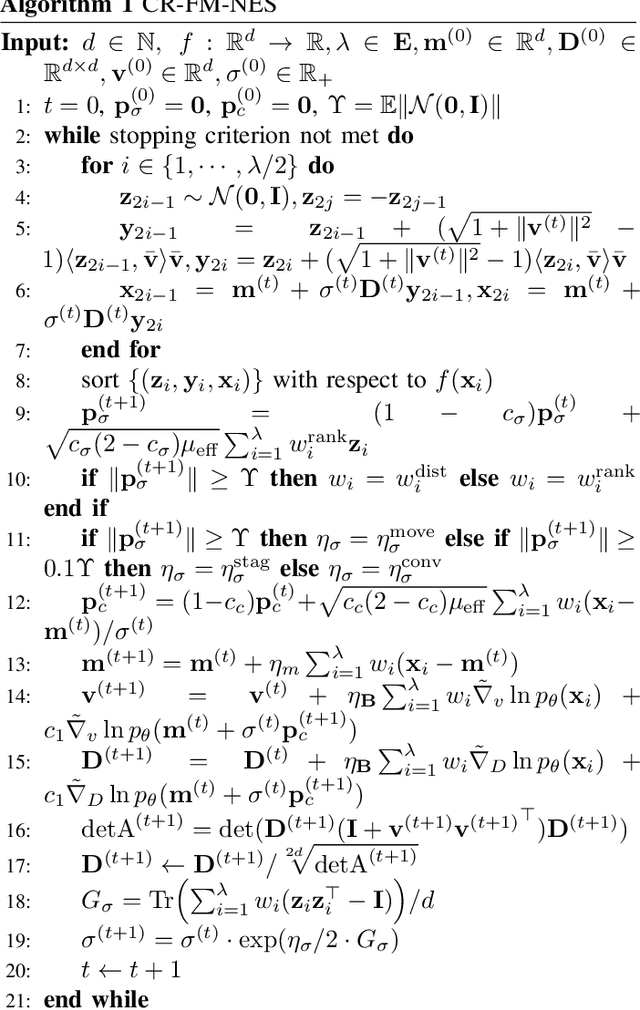
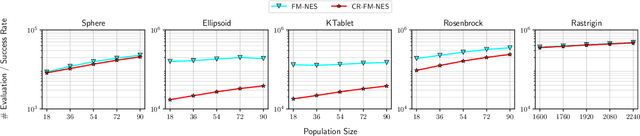
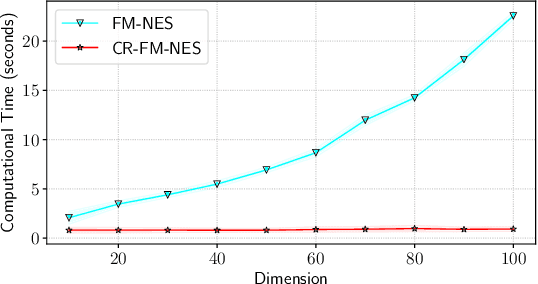
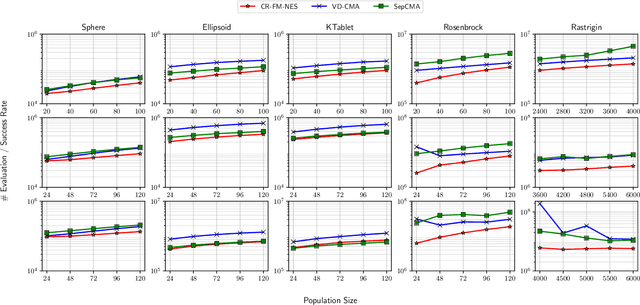
In this work, we propose a new variant of natural evolution strategies (NES) for high-dimensional black-box optimization problems. The proposed method, CR-FM-NES, extends a recently proposed state-of-the-art NES, Fast Moving Natural Evolution Strategy (FM-NES), in order to be applicable in high-dimensional problems. CR-FM-NES builds on an idea using a restricted representation of a covariance matrix instead of using a full covariance matrix, while inheriting an efficiency of FM-NES. The restricted representation of the covariance matrix enables CR-FM-NES to update parameters of a multivariate normal distribution in linear time and space complexity, which can be applied to high-dimensional problems. Our experimental results reveal that CR-FM-NES does not lose the efficiency of FM-NES, and on the contrary, CR-FM-NES has achieved significant speedup compared to FM-NES on some benchmark problems. Furthermore, our numerical experiments using 200, 600, and 1000-dimensional benchmark problems demonstrate that CR-FM-NES is effective over scalable baseline methods, VD-CMA and Sep-CMA.
Statistical analysis of Wasserstein GANs with applications to time series forecasting
Nov 05, 2020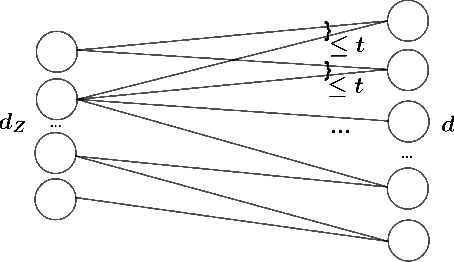
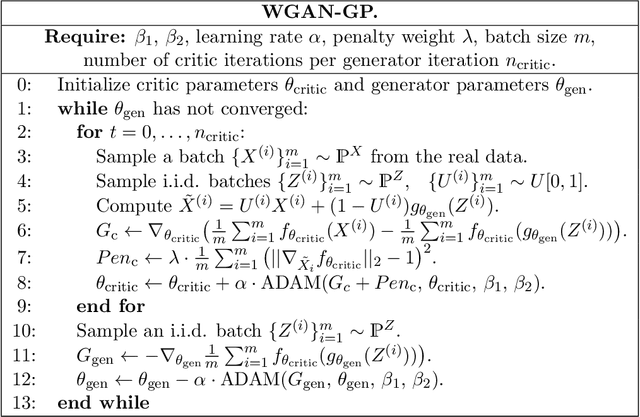
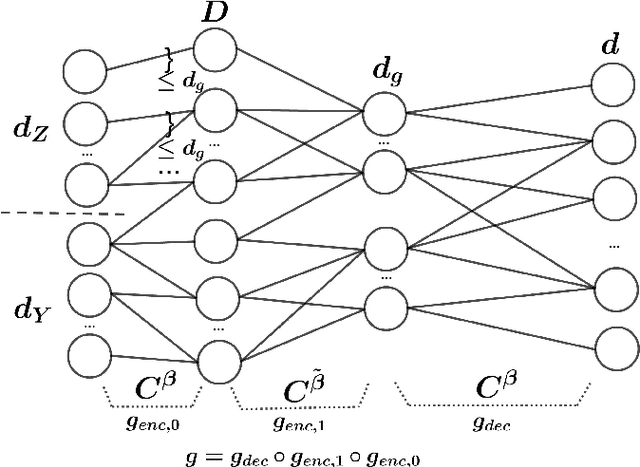
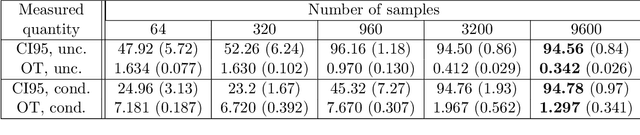
We provide statistical theory for conditional and unconditional Wasserstein generative adversarial networks (WGANs) in the framework of dependent observations. We prove upper bounds for the excess Bayes risk of the WGAN estimators with respect to a modified Wasserstein-type distance. Furthermore, we formalize and derive statements on the weak convergence of the estimators and use them to develop confidence intervals for new observations. The theory is applied to the special case of high-dimensional time series forecasting. We analyze the behavior of the estimators in simulations based on synthetic data and investigate a real data example with temperature data. The dependency of the data is quantified with absolutely regular beta-mixing coefficients.
Sublinear Time Numerical Linear Algebra for Structured Matrices
Dec 12, 2019We show how to solve a number of problems in numerical linear algebra, such as least squares regression, $\ell_p$-regression for any $p \geq 1$, low rank approximation, and kernel regression, in time $T(A) \poly(\log(nd))$, where for a given input matrix $A \in \mathbb{R}^{n \times d}$, $T(A)$ is the time needed to compute $A\cdot y$ for an arbitrary vector $y \in \mathbb{R}^d$. Since $T(A) \leq O(\nnz(A))$, where $\nnz(A)$ denotes the number of non-zero entries of $A$, the time is no worse, up to polylogarithmic factors, as all of the recent advances for such problems that run in input-sparsity time. However, for many applications, $T(A)$ can be much smaller than $\nnz(A)$, yielding significantly sublinear time algorithms. For example, in the overconstrained $(1+\epsilon)$-approximate polynomial interpolation problem, $A$ is a Vandermonde matrix and $T(A) = O(n \log n)$; in this case our running time is $n \cdot \poly(\log n) + \poly(d/\epsilon)$ and we recover the results of \cite{avron2013sketching} as a special case. For overconstrained autoregression, which is a common problem arising in dynamical systems, $T(A) = O(n \log n)$, and we immediately obtain $n \cdot \poly(\log n) + \poly(d/\epsilon)$ time. For kernel autoregression, we significantly improve the running time of prior algorithms for general kernels. For the important case of autoregression with the polynomial kernel and arbitrary target vector $b\in\mathbb{R}^n$, we obtain even faster algorithms. Our algorithms show that, perhaps surprisingly, most of these optimization problems do not require much more time than that of a polylogarithmic number of matrix-vector multiplications.
GNNRank: Learning Global Rankings from Pairwise Comparisons via Directed Graph Neural Networks
Feb 01, 2022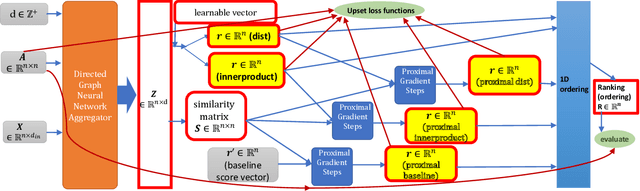
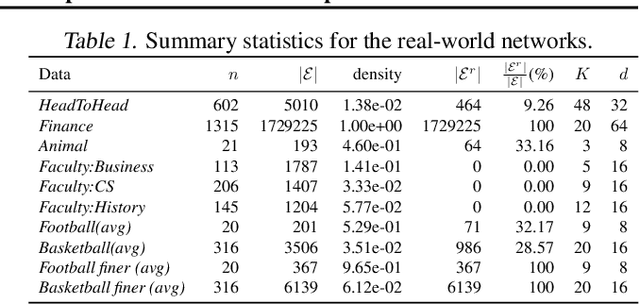
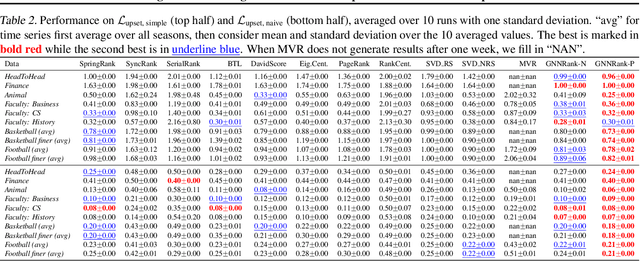

Recovering global rankings from pairwise comparisons is an important problem with many applications, ranging from time synchronization to sports team ranking. Pairwise comparisons corresponding to matches in a competition can naturally be construed as edges in a directed graph (digraph), whose nodes represent competitors with an unknown rank or skill strength. However, existing methods addressing the rank estimation problem have thus far not utilized powerful neural network architectures to optimize ranking objectives. Hence, we propose to augment an algorithm with neural network, in particular graph neural network (GNN) for its coherence to the problem at hand. In this paper, we introduce GNNRank, a modeling framework that is compatible with any GNN capable of learning digraph embeddings, and we devise trainable objectives to encode ranking upsets/violations. This framework includes a ranking score estimation approach, and adds a useful inductive bias by unfolding the Fiedler vector computation of the graph constructed from a learnable similarity matrix. Experimental results on a wide range of data sets show that our methods attain competitive and often superior performance compared with existing approaches. It also shows promising transfer ability to new data based on the trained GNN model.
Graph Neural Networks Accelerated Molecular Dynamics
Dec 06, 2021

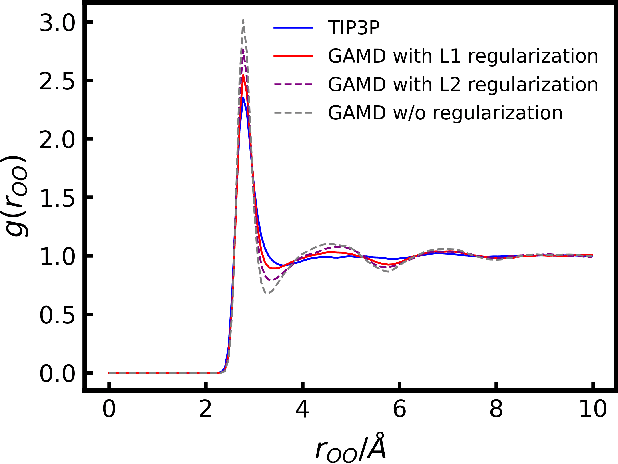
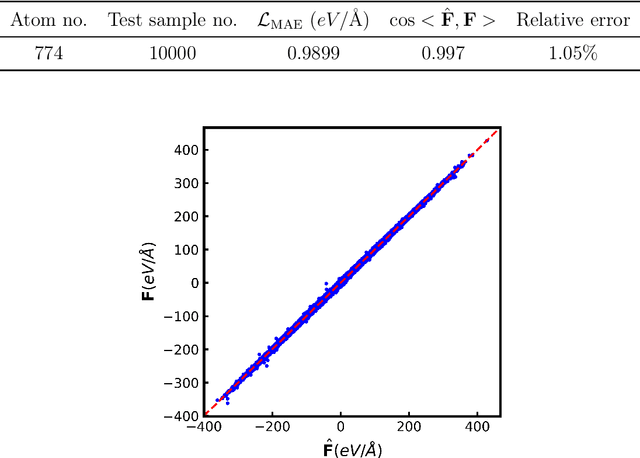
Molecular Dynamics (MD) simulation is a powerful tool for understanding the dynamics and structure of matter. Since the resolution of MD is atomic-scale, achieving long time-scale simulations with femtosecond integration is very expensive. In each MD step, numerous redundant computations are performed which can be learnt and avoided. These redundant computations can be surrogated and modeled by a deep learning model like a Graph Neural Network (GNN). In this work, we developed a GNN Accelerated Molecular Dynamics (GAMD) model that achieves fast and accurate force predictions and generates trajectories consistent with the classical MD simulations. Our results show that GAMD can accurately predict the dynamics of two typical molecular systems, Lennard-Jones (LJ) particles and Water (LJ+Electrostatics). GAMD's learning and inference are agnostic to the scale, where it can scale to much larger systems at test time. We also performed a comprehensive benchmark test comparing our implementation of GAMD to production-level MD softwares, where we showed GAMD is competitive with them on the large-scale simulation.
Multi-modal unsupervised brain image registration using edge maps
Feb 09, 2022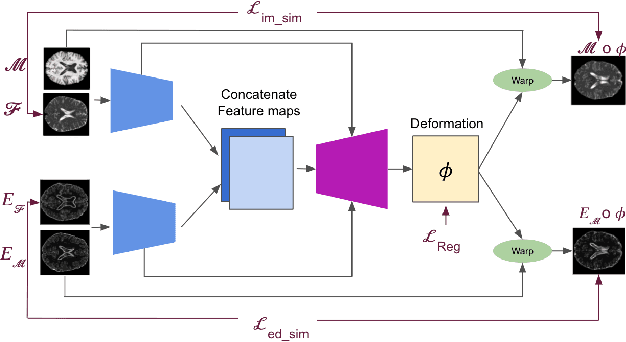
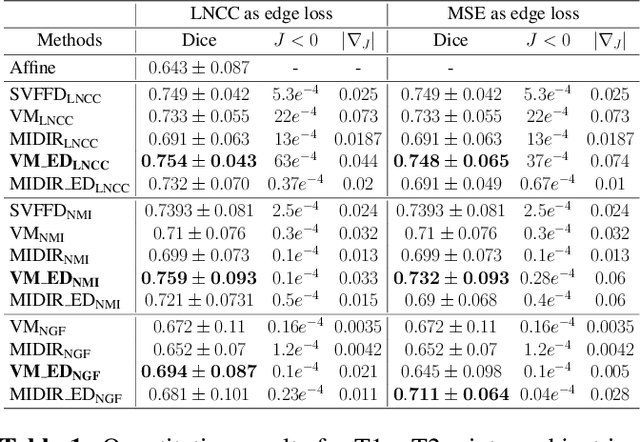
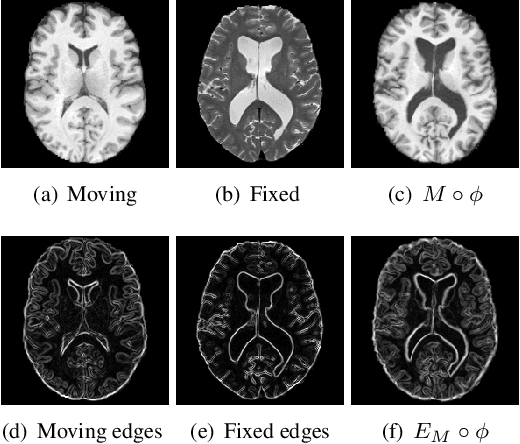
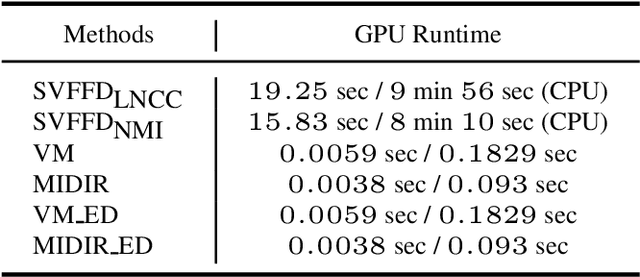
Diffeomorphic deformable multi-modal image registration is a challenging task which aims to bring images acquired by different modalities to the same coordinate space and at the same time to preserve the topology and the invertibility of the transformation. Recent research has focused on leveraging deep learning approaches for this task as these have been shown to achieve competitive registration accuracy while being computationally more efficient than traditional iterative registration methods. In this work, we propose a simple yet effective unsupervised deep learning-based {\em multi-modal} image registration approach that benefits from auxiliary information coming from the gradient magnitude of the image, i.e. the image edges, during the training. The intuition behind this is that image locations with a strong gradient are assumed to denote a transition of tissues, which are locations of high information value able to act as a geometry constraint. The task is similar to using segmentation maps to drive the training, but the edge maps are easier and faster to acquire and do not require annotations. We evaluate our approach in the context of registering multi-modal (T1w to T2w) magnetic resonance (MR) brain images of different subjects using three different loss functions that are said to assist multi-modal registration, showing that in all cases the auxiliary information leads to better results without compromising the runtime.