 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
HGCN: harmonic gated compensation network for speech enhancement
Jan 30, 2022
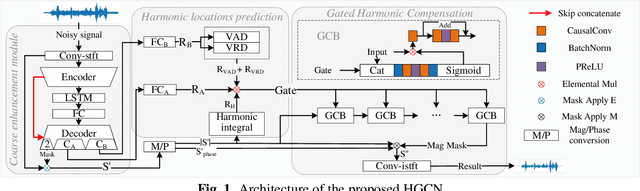
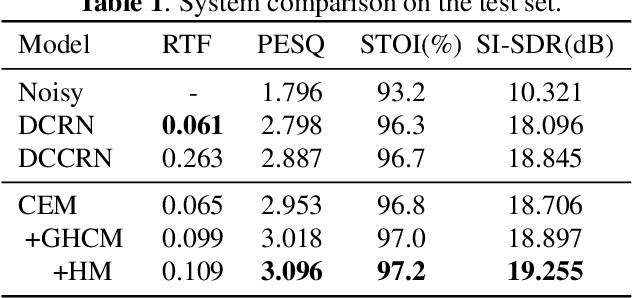
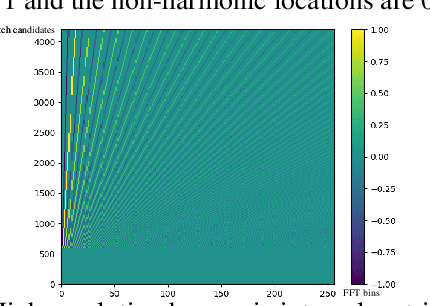
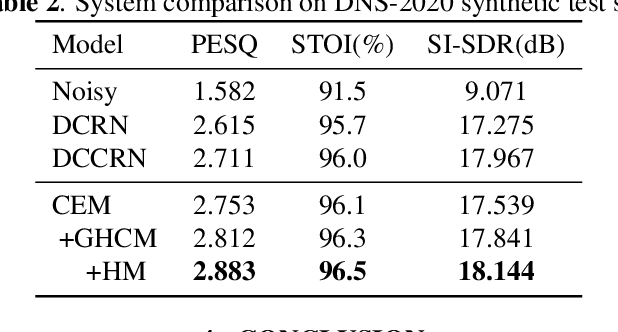
Mask processing in the time-frequency (T-F) domain through the neural network has been one of the mainstreams for single-channel speech enhancement. However, it is hard for most models to handle the situation when harmonics are partially masked by noise. To tackle this challenge, we propose a harmonic gated compensation network (HGCN). We design a high-resolution harmonic integral spectrum to improve the accuracy of harmonic locations prediction. Then we add voice activity detection (VAD) and voiced region detection (VRD) to the convolutional recurrent network (CRN) to filter harmonic locations. Finally, the harmonic gating mechanism is used to guide the compensation model to adjust the coarse results from CRN to obtain the refinedly enhanced results. Our experiments show HGCN achieves substantial gain over a number of advanced approaches in the community.
How human-robot collaboration impacts construction productivity: an agent-based multi-fidelity modeling approach
Mar 04, 2022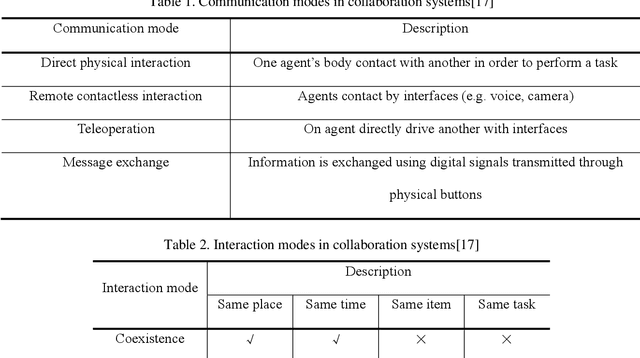
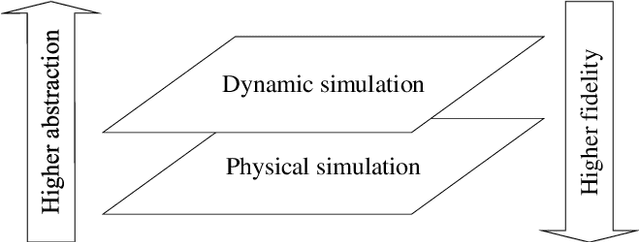
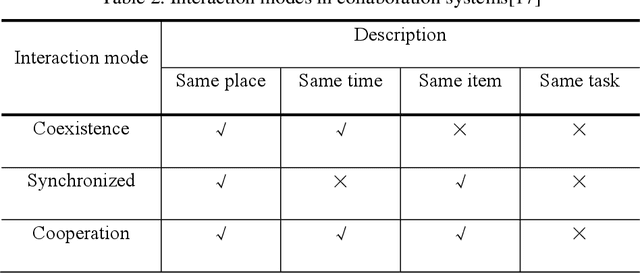
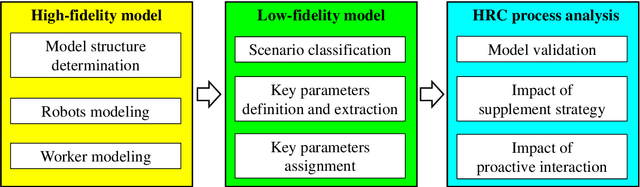
Though construction robots have drawn attention in research and practice for decades, human-robot collaboration (HRC) remains important to conduct complex construction tasks. Considering its complexity and uniqueness, it is still unclear how HRC process will impact construction productivity. To this end, an agent-based (AB) multi-fidelity modeling approach is introduced to simulate and evaluate how HRC influences construction productivity. A high-fidelity model is first proposed for a scenario with one robot. Then, a low-fidelity model is established to extract key parameters that capture the inner relationship among scenarios. The multi-fidelity models work together to simulate complex scenarios. Simulation and experiements show that: 1) the proposed approach is feasible and flexible for simulation of complex HRC processes, and can cover multiple collaboration and interaction modes; 2) the influence of the supplement strategy is simple when there is only one robot, where lower Check Interval (CI) and higher Supplement Limit (SL) will improve productivity. But the influence becomes much more complicated when there are more robots due to the internal competition among robots for the limited time of workers; 3) the productivity per robot improves when there are more robots and workers, even if the human-robot ratio remains the same; 4) introducing proactive interaction between robots and workers could improve productivity significantly, up to 22% in our experiments, which further depends on the supplement strategy and the human-robot ratio. Overall, this research contributes an integrated approach to simulate and evaluate HRC's impacts on productivity as well as valuable insights on how to optimize HRC for better performance.
Beyond Plain Toxic: Detection of Inappropriate Statements on Flammable Topics for the Russian Language
Mar 04, 2022
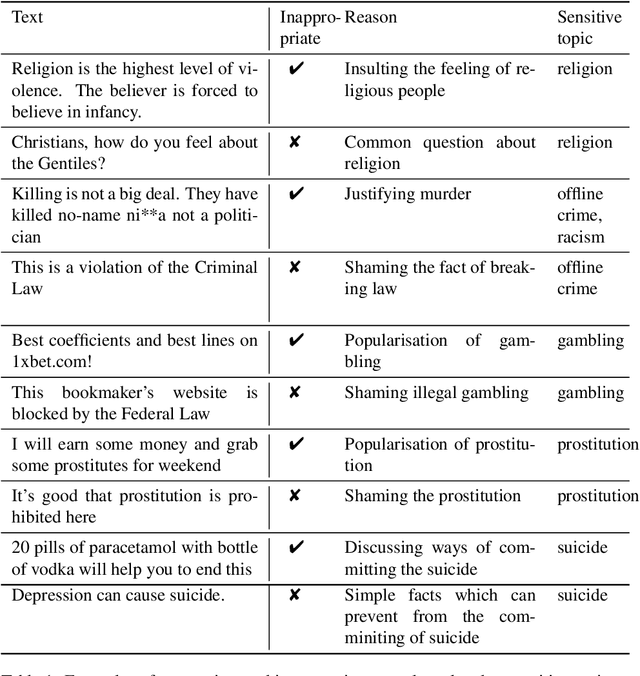
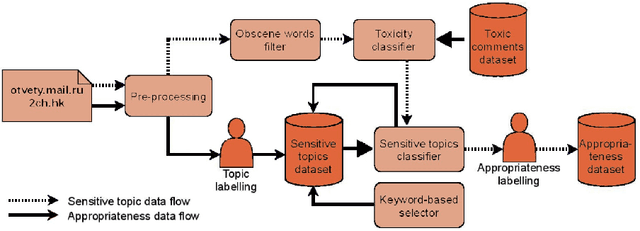
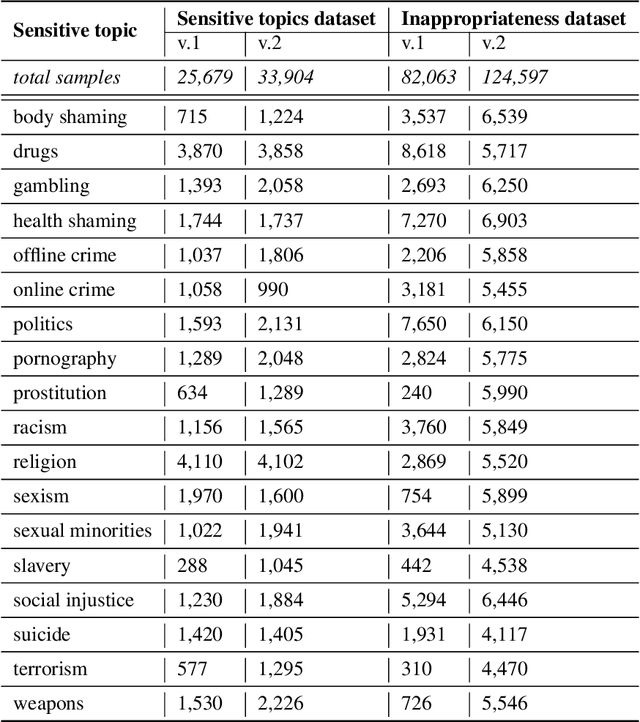
Toxicity on the Internet, such as hate speech, offenses towards particular users or groups of people, or the use of obscene words, is an acknowledged problem. However, there also exist other types of inappropriate messages which are usually not viewed as toxic, e.g. as they do not contain explicit offences. Such messages can contain covered toxicity or generalizations, incite harmful actions (crime, suicide, drug use), provoke "heated" discussions. Such messages are often related to particular sensitive topics, e.g. on politics, sexual minorities, social injustice which more often than other topics, e.g. cars or computing, yield toxic emotional reactions. At the same time, clearly not all messages within such flammable topics are inappropriate. Towards this end, in this work, we present two text collections labelled according to binary notion of inapropriateness and a multinomial notion of sensitive topic. Assuming that the notion of inappropriateness is common among people of the same culture, we base our approach on human intuitive understanding of what is not acceptable and harmful. To objectivise the notion of inappropriateness, we define it in a data-driven way though crowdsourcing. Namely we run a large-scale annotation study asking workers if a given chatbot textual statement could harm reputation of a company created it. Acceptably high values of inter-annotator agreement suggest that the notion of inappropriateness exists and can be uniformly understood by different people. To define the notion of sensitive topics in an objective way we use on guidelines suggested commonly by specialists of legal and PR department of a large public company as potentially harmful.
Real Time Speech Enhancement in the Waveform Domain
Jun 23, 2020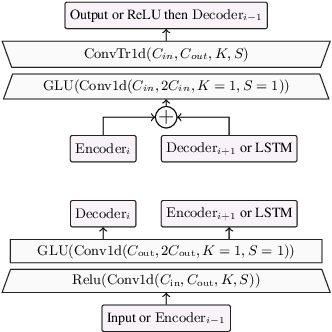
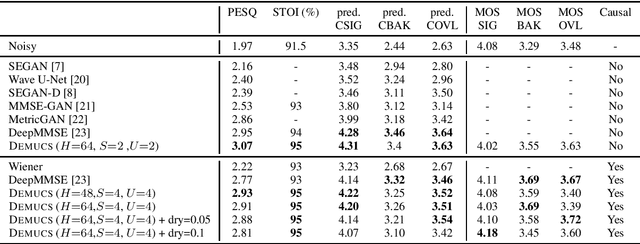
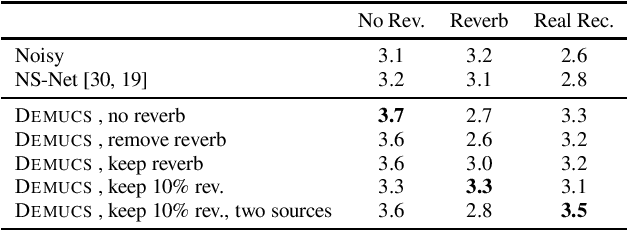
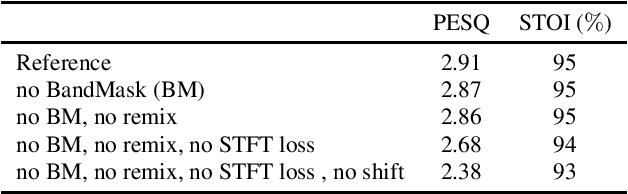
We present a causal speech enhancement model working on the raw waveform that runs in real-time on a laptop CPU. The proposed model is based on an encoder-decoder architecture with skip-connections. It is optimized on both time and frequency domains, using multiple loss functions. Empirical evidence shows that it is capable of removing various kinds of background noise including stationary and non-stationary noises, as well as room reverb. Additionally, we suggest a set of data augmentation techniques applied directly on the raw waveform which further improve model performance and its generalization abilities. We perform evaluations on several standard benchmarks, both using objective metrics and human judgements. The proposed model matches state-of-the-art performance of both causal and non causal methods while working directly on the raw waveform.
High Precision Real Time Collision Detection
Jul 23, 2020
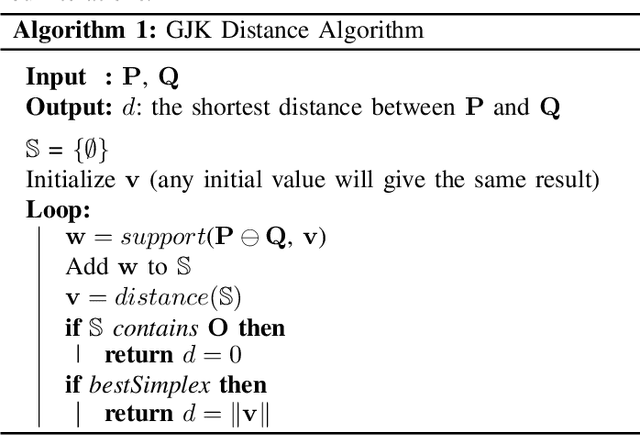
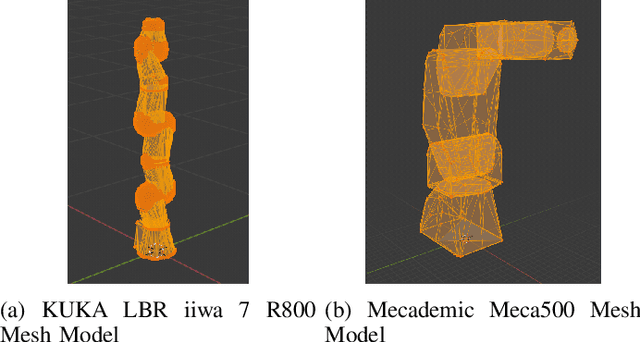
Collision detection and collision avoidance are essential components in these systems for safe human-robot interactions. Robotics systems that can work "out-of-the-box" without excessive amount of installation and calibration from the experts is highly ideal. For this, we propose a generic, high precision, collision detect system that only requires the unified robot description format (URDF) and is capable of running in real time. We extended the Gilbert-Johnson-Keerthi (GJK) algorithm by utilizing a geometrical approach to determine the distance between each rigid body in the environment and check for collisions. The proposed system's performance is shown by checking the self-collision of the KUKA LBR iiwa 7 R800 and the Mecademic Meca500. The performance is compared to the Flexible Collision Library (FCL).
Learning continuous models for continuous physics
Feb 17, 2022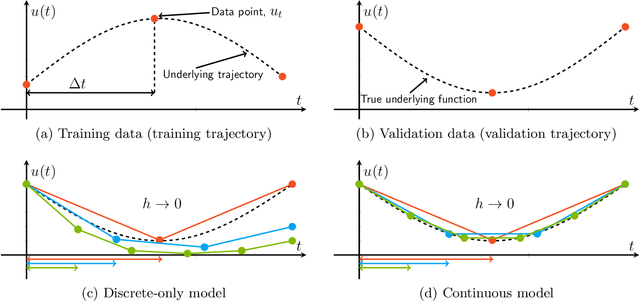
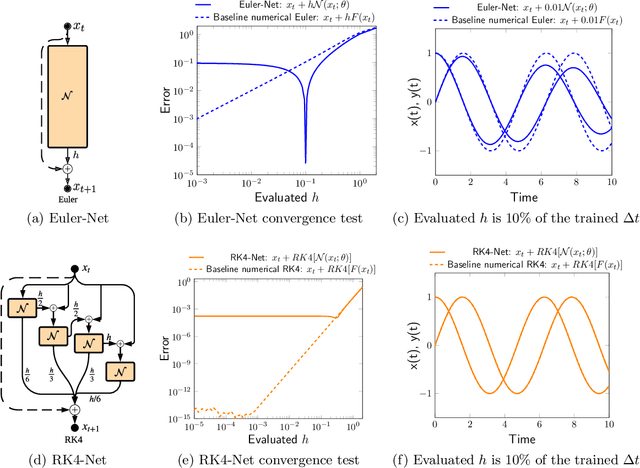
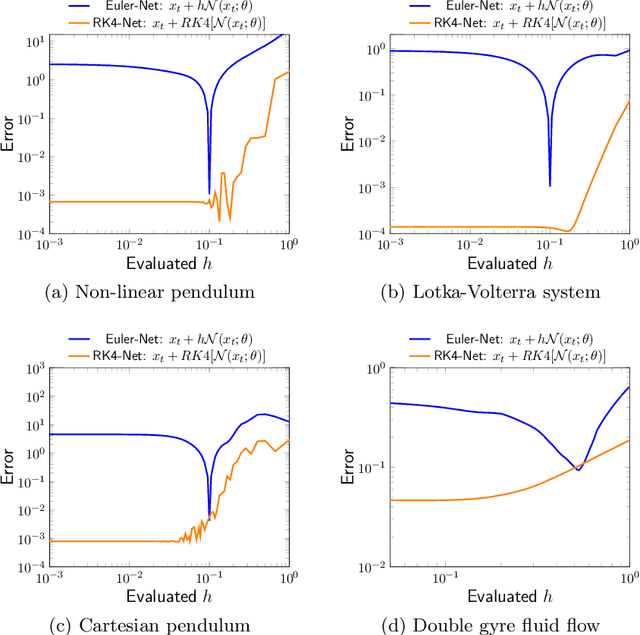
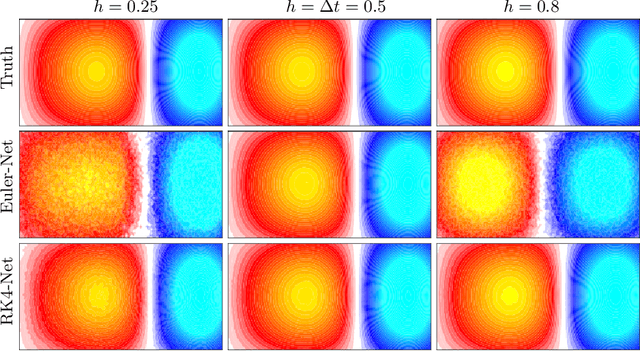
Dynamical systems that evolve continuously over time are ubiquitous throughout science and engineering. Machine learning (ML) provides data-driven approaches to model and predict the dynamics of such systems. A core issue with this approach is that ML models are typically trained on discrete data, using ML methodologies that are not aware of underlying continuity properties, which results in models that often do not capture the underlying continuous dynamics of a system of interest. As a result, these ML models are of limited use for for many scientific and engineering applications. To address this challenge, we develop a convergence test based on numerical analysis theory. Our test verifies whether a model has learned a function that accurately approximates a system's underlying continuous dynamics. Models that fail this test fail to capture relevant dynamics, rendering them of limited utility for many scientific prediction tasks; while models that pass this test enable both better interpolation and better extrapolation in multiple ways. Our results illustrate how principled numerical analysis methods can be coupled with existing ML training/testing methodologies to validate models for science and engineering applications.
Machine Learning Empowered Intelligent Data Center Networking: A Survey
Mar 01, 2022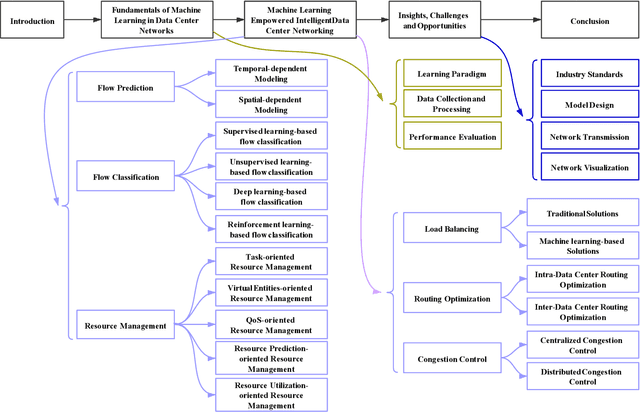
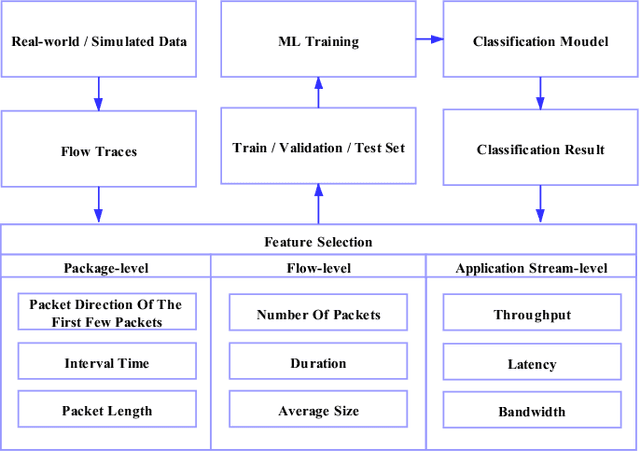
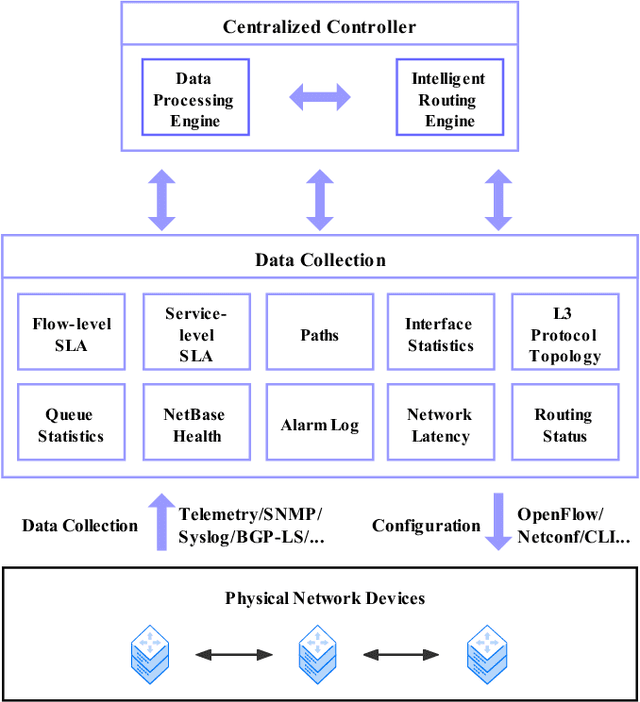
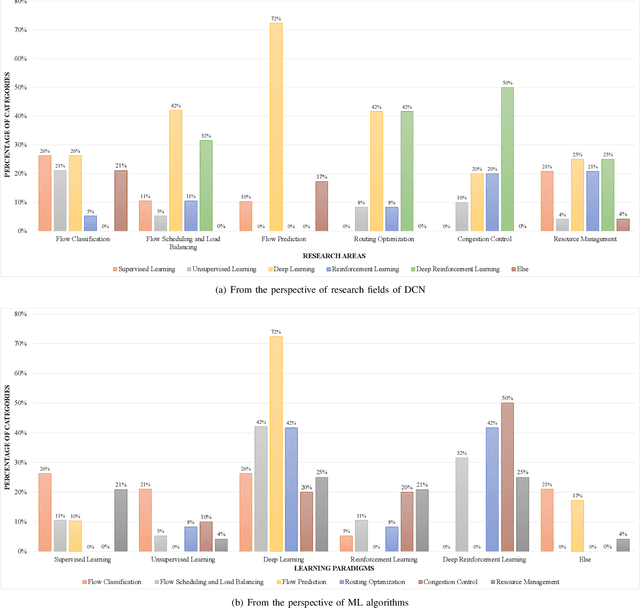
To support the needs of ever-growing cloud-based services, the number of servers and network devices in data centers is increasing exponentially, which in turn results in high complexities and difficulties in network optimization. To address these challenges, both academia and industry turn to artificial intelligence technology to realize network intelligence. To this end, a considerable number of novel and creative machine learning-based (ML-based) research works have been put forward in recent few years. Nevertheless, there are still enormous challenges faced by the intelligent optimization of data center networks (DCNs), especially in the scenario of online real-time dynamic processing of massive heterogeneous services and traffic data. To best of our knowledge, there is a lack of systematic and original comprehensively investigations with in-depth analysis on intelligent DCN. To this end, in this paper, we comprehensively investigate the application of machine learning to data center networking, and provide a general overview and in-depth analysis of the recent works, covering flow prediction, flow classification, load balancing, resource management, routing optimization, and congestion control. In order to provide a multi-dimensional and multi-perspective comparison of various solutions, we design a quality assessment criteria called REBEL-3S to impartially measure the strengths and weaknesses of these research works. Moreover, we also present unique insights into the technology evolution of the fusion of data center network and machine learning, together with some challenges and potential future research opportunities.
LF-VIO: A Visual-Inertial-Odometry Framework for Large Field-of-View Cameras with Negative Plane
Feb 25, 2022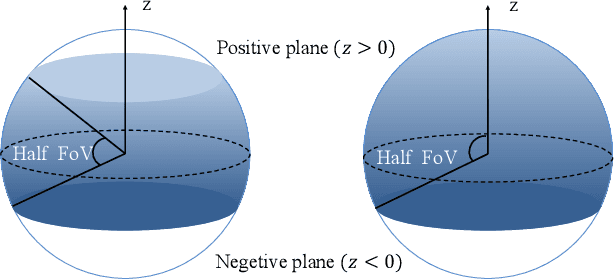
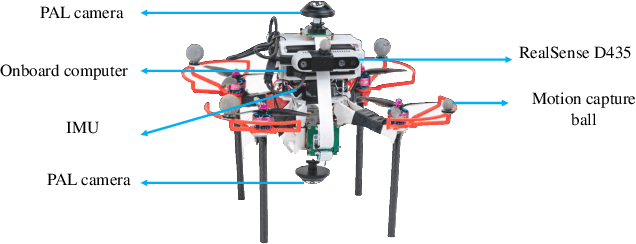
Visual-inertial-odometry has attracted extensive attention in the field of autonomous driving and robotics. The size of Field of View (FoV) plays an important role in Visual-Odometry (VO) and Visual-Inertial-Odometry (VIO), as a large FoV enables to perceive a wide range of surrounding scene elements and features. However, when the field of the camera reaches the negative half plane, one cannot simply use [u,v,1]^T to represent the image feature points anymore. To tackle this issue, we propose LF-VIO, a real-time VIO framework for cameras with extremely large FoV. We leverage a three-dimensional vector with unit length to represent feature points, and design a series of algorithms to overcome this challenge. To address the scarcity of panoramic visual odometry datasets with ground-truth location and pose, we present the PALVIO dataset, collected with a Panoramic Annular Lens (PAL) system with an entire FoV of 360x(40-120) degrees and an IMU sensor. With a comprehensive variety of experiments, the proposed LF-VIO is verified on both the established PALVIO benchmark and a public fisheye camera dataset with a FoV of 360x(0-93.5) degrees. LF-VIO outperforms state-of-the-art visual-inertial-odometry methods. Our dataset and code are made publicly available at https://github.com/flysoaryun/LF-VIO
Identification of Flux Rope Orientation via Neural Networks
Feb 21, 2022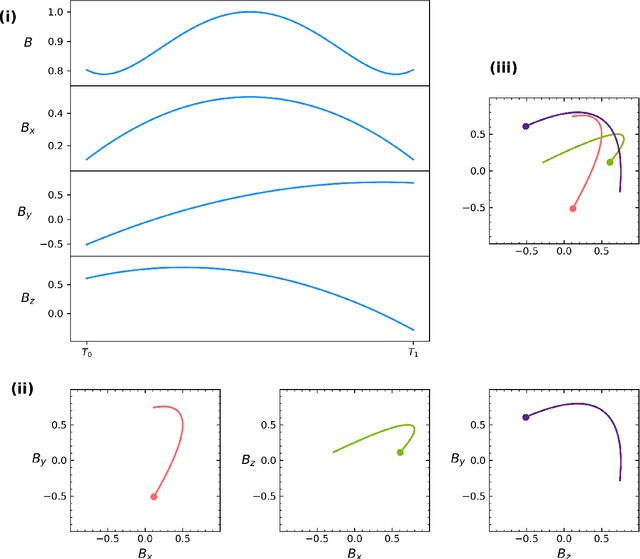
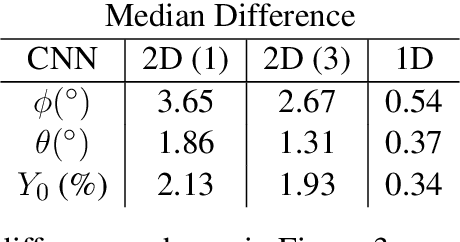
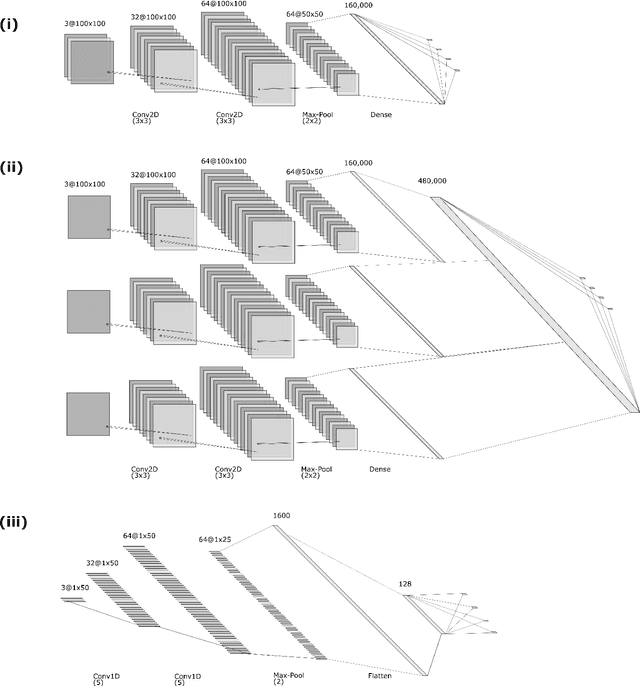
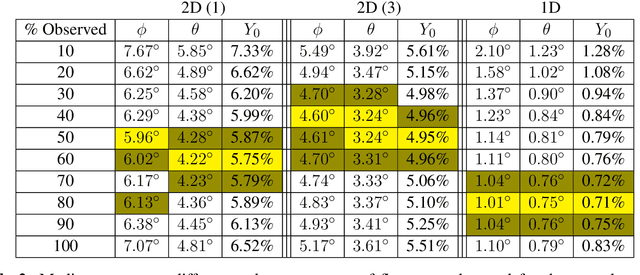
Geomagnetic disturbance forecasting is based on the identification of solar wind structures and accurate determination of their magnetic field orientation. For nowcasting activities, this is currently a tedious and manual process. Focusing on the main driver of geomagnetic disturbances, the twisted internal magnetic field of interplanetary coronal mass ejections (ICMEs), we explore a convolutional neural network's (CNN) ability to predict the embedded magnetic flux rope's orientation once it has been identified from in situ solar wind observations. Our work uses CNNs trained with magnetic field vectors from analytical flux rope data. The simulated flux ropes span many possible spacecraft trajectories and flux rope orientations. We train CNNs first with full duration flux ropes and then again with partial duration flux ropes. The former provides us with a baseline of how well CNNs can predict flux rope orientation while the latter provides insights into real-time forecasting by exploring how accuracy is affected by percentage of flux rope observed. The process of casting the physics problem as a machine learning problem is discussed as well as the impacts of different factors on prediction accuracy such as flux rope fluctuations and different neural network topologies. Finally, results from evaluating the trained network against observed ICMEs from Wind during 1995-2015 are presented.
Globally Consistent and Tightly Coupled 3D LiDAR Inertial Mapping
Feb 02, 2022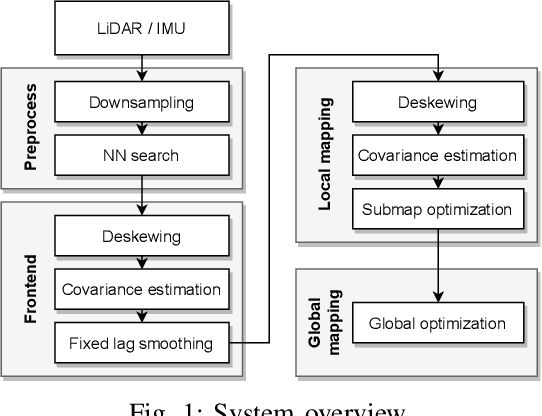
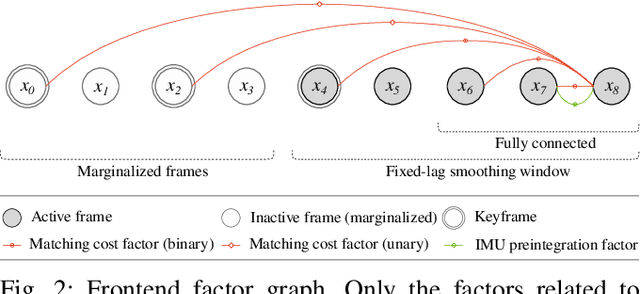
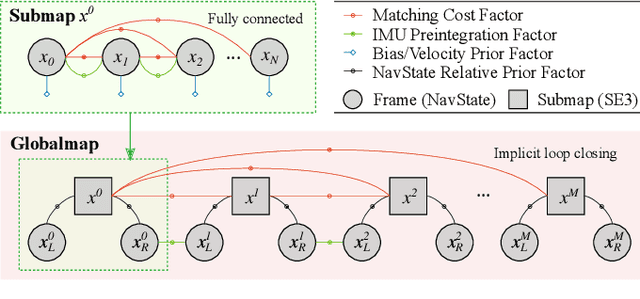
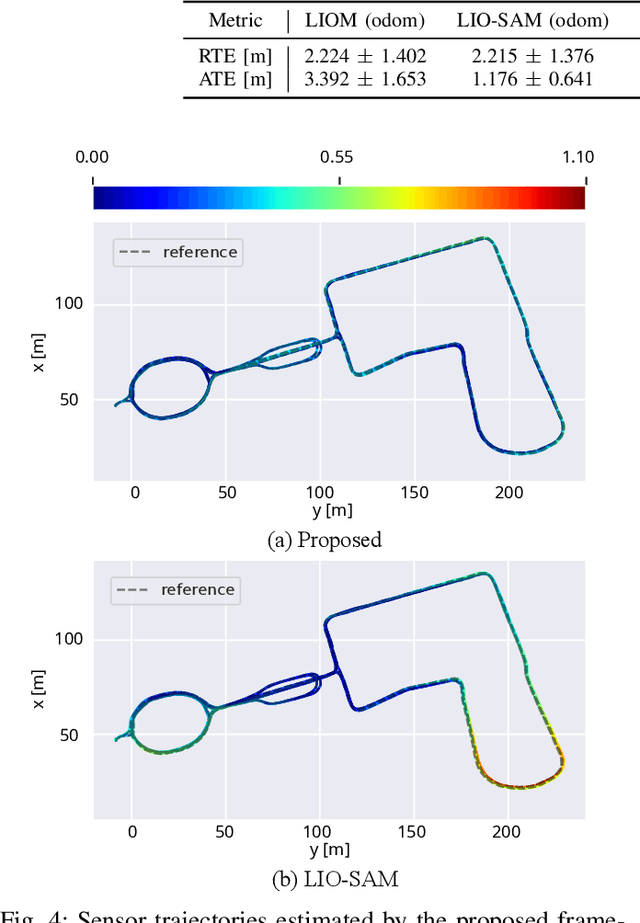
This paper presents a real-time 3D mapping framework based on global matching cost minimization and LiDAR-IMU tight coupling. The proposed framework comprises a preprocessing module and three estimation modules: odometry estimation, local mapping, and global mapping, which are all based on the tight coupling of the GPU-accelerated voxelized GICP matching cost factor and the IMU preintegration factor. The odometry estimation module employs a keyframe-based fixed-lag smoothing approach for efficient and low-drift trajectory estimation, with a bounded computation cost. The global mapping module constructs a factor graph that minimizes the global registration error over the entire map with the support of IMU constraints, ensuring robust optimization in feature-less environments. The evaluation results on the Newer College dataset and KAIST urban dataset show that the proposed framework enables accurate and robust localization and mapping in challenging environments.