 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
ChildCI Framework: Analysis of Motor and Cognitive Development in Children-Computer Interaction for Age Detection
Apr 08, 2022
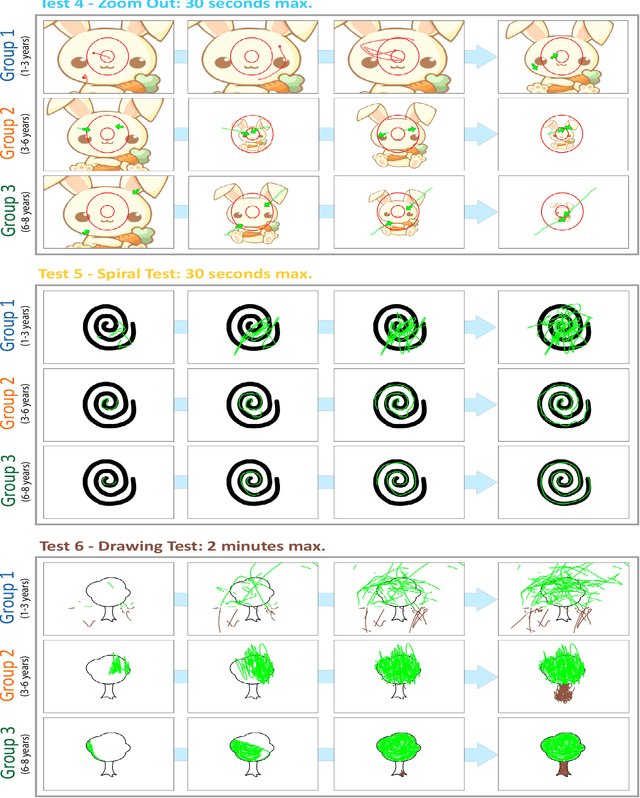
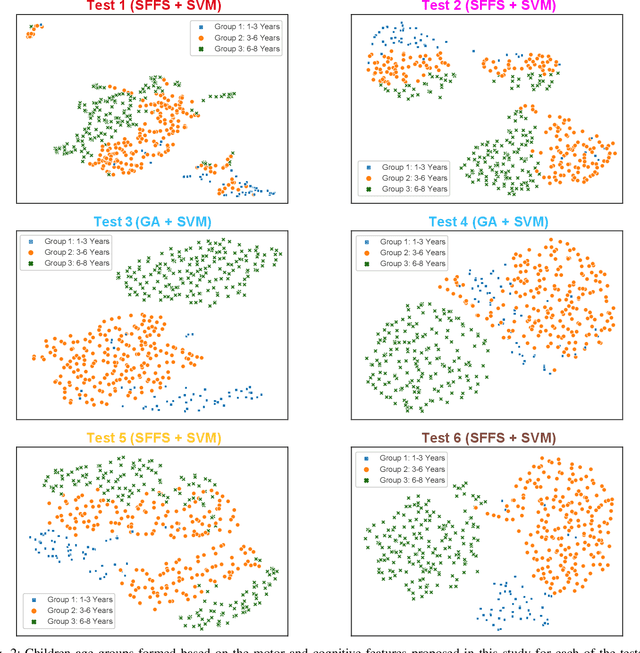
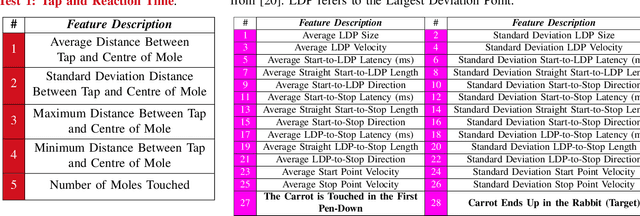
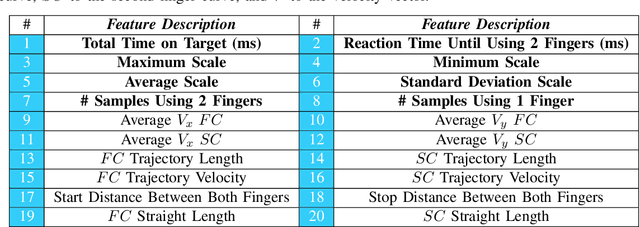
This article presents a comprehensive analysis of the different tests proposed in the recent ChildCI framework, proving its potential for generating a better understanding of children's neuromotor and cognitive development along time, as well as their possible application in other research areas such as e-Health and e-Learning. In particular, we propose a set of over 100 global features related to motor and cognitive aspects of the children interaction with mobile devices, some of them collected and adapted from the literature. Furthermore, we analyse the robustness and discriminative power of the proposed feature set including experimental results for the task of children age group detection based on their motor and cognitive behaviors. Two different scenarios are considered in this study: i) single-test scenario, and ii) multiple-test scenario. Results over 93% accuracy are achieved using the publicly available ChildCIdb_v1 database (over 400 children from 18 months to 8 years old), proving the high correlation of children's age with the way they interact with mobile devices.
A Wavelet, AR and SVM based hybrid method for short-term wind speed prediction
Mar 29, 2022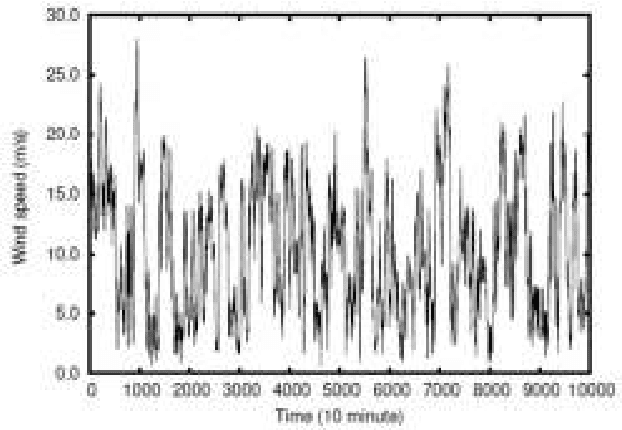
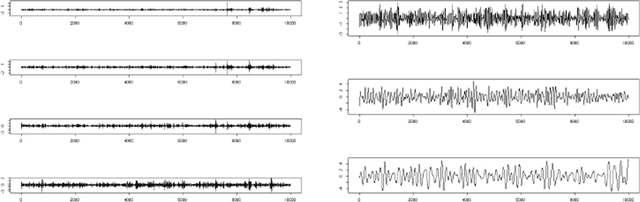
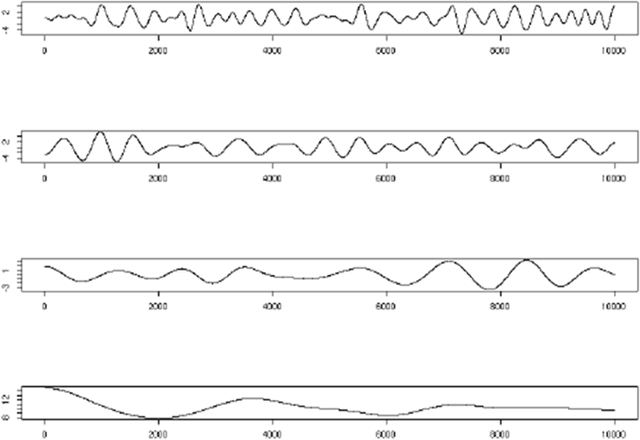
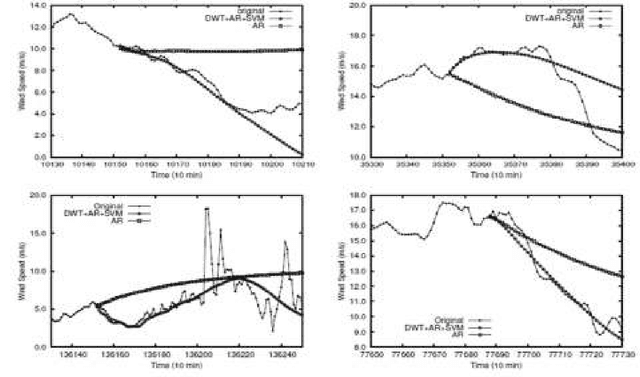
Wind speed modelling and prediction has been gaining importance because of its significant roles in various stages of wind energy management. In this paper, we propose a hybrid model, based on wavelet transform to improve the accuracy of the short-term forecast. The wind speed time series are split into various frequency components using wavelet decomposition technique, and each frequency components are modelled separately. Since the components associated with the high- frequency range shows stochastic nature, we modelled them with autoregressive (AR) method and rest of low-frequency components modelled with support vector machine (SVM). The results of the hybrid method show a promising improvement in accuracy of wind speed prediction compared to that of stand-alone AR or SVM model.
A Multi-Characteristic Learning Method with Micro-Doppler Signatures for Pedestrian Identification
Mar 23, 2022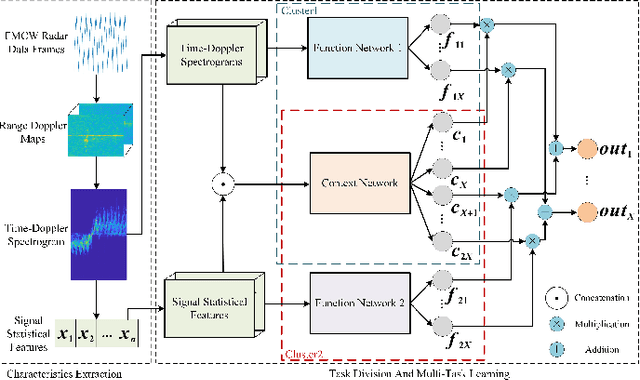
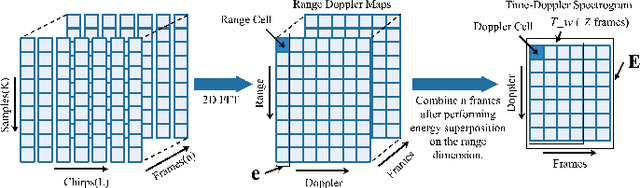
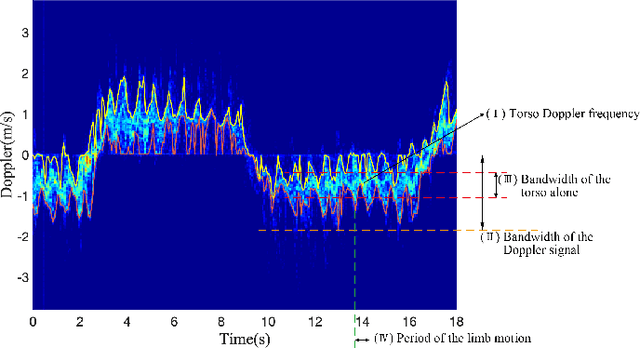
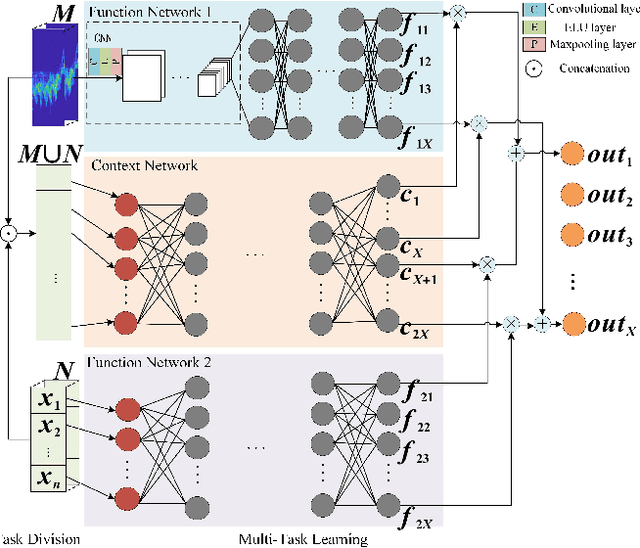
The identification of pedestrians using radar micro-Doppler signatures has become a hot topic in recent years. In this paper, we propose a multi-characteristic learning (MCL) model with clusters to jointly learn discrepant pedestrian micro-Doppler signatures and fuse the knowledge learned from each cluster into final decisions. Time-Doppler spectrogram (TDS) and signal statistical features extracted from FMCW radar, as two categories of micro-Doppler signatures, are used in MCL to learn the micro-motion information inside pedestrians' free walking patterns. The experimental results show that our model achieves a higher accuracy rate and is more stable for pedestrian identification than other studies, which make our model more practical.
Design of an Internet of Things System for Smart Hospitals
Apr 06, 2022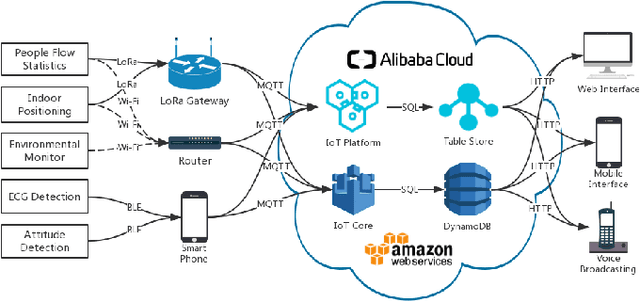
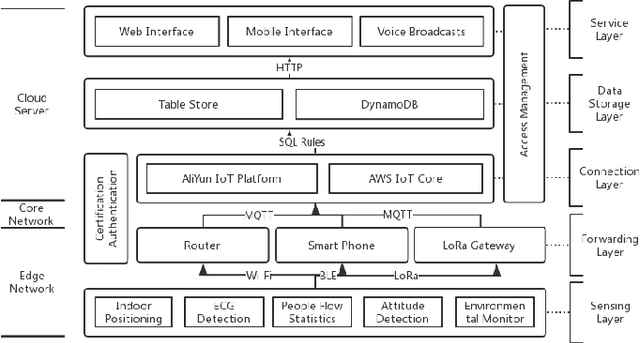
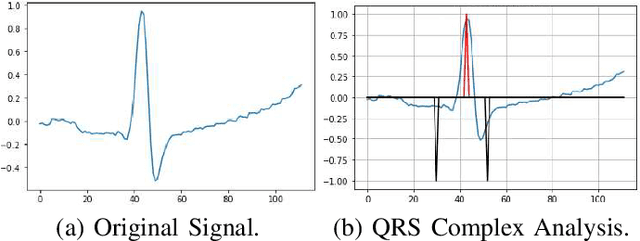
With the fast advancement of smart devices and Internet of Things (IoT) technologies, certain established situations are opening up new avenues of exploration. Particularly in the sphere of healthcare, the diverse and big population, the complicated and professional data, and the stringent environmental requirements for certain medical scenes and equipment all impose exceptionally high standards on hospital administration. As a result, an effective and secure Internet of things system is critical. This article proposes an IoT system that might be used in hospitals for a variety of purposes. This system collects data by LoRa, Wi-Fi, and other ways, uploads it to a cloud platform for processing over a secure connection, and then feeds it back to users in real-time via the user interface. This system enables precise indoor localization through the use of UWB, ECG signal detection, environmental monitoring, and data on people flow.
A Neural Vocoder Based Packet Loss Concealment Algorithm
Mar 26, 2022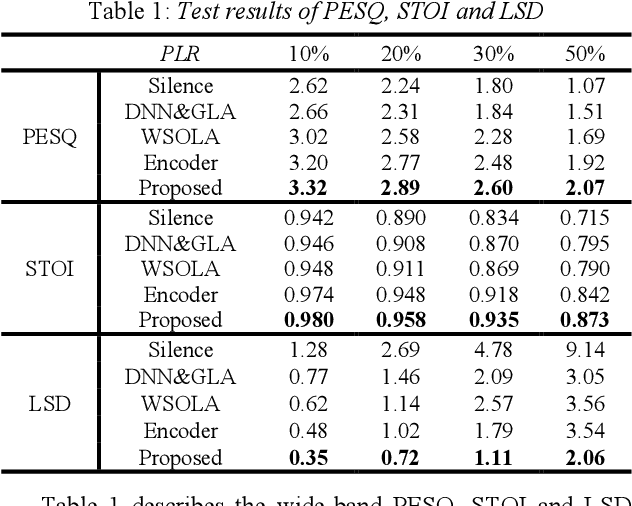
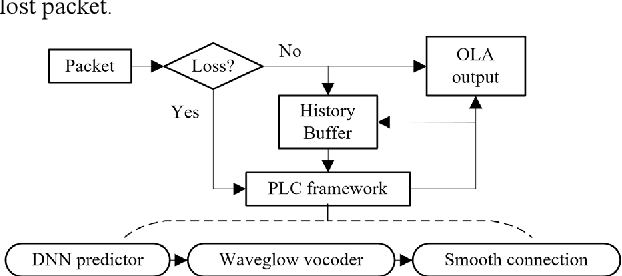
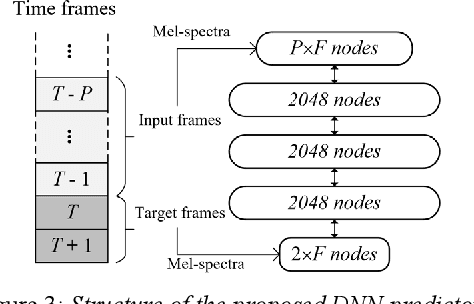
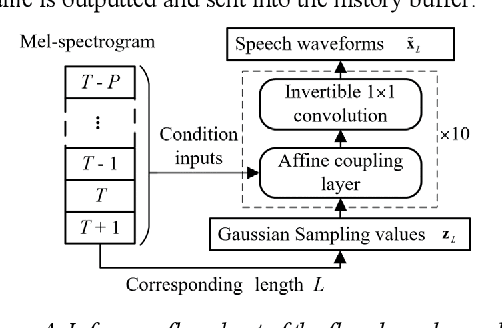
The packet loss problem seriously affects the quality of service in Voice over IP (VoIP) sceneries. In this paper, we investigated online receiver-based packet loss concealment which is much more portable and applicable. For ensuring the speech naturalness, rather than directly processing time-domain waveforms or separately reconstructing amplitudes and phases in frequency domain, a flow-based neural vocoder is adopted to generate the substitution waveform of lost packet from Mel-spectrogram which is generated from history contents by a well-designed neural predictor. Furthermore, a waveform similarity-based smoothing post-process is created to mitigate the discontinuity of speech and avoid the artifacts. The experimental results show the outstanding performance of the proposed method.
Automatic Segmentation of Aircraft Dents in Point Clouds
May 03, 2022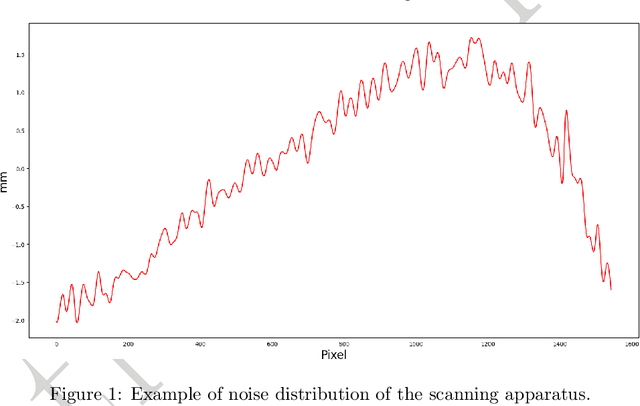
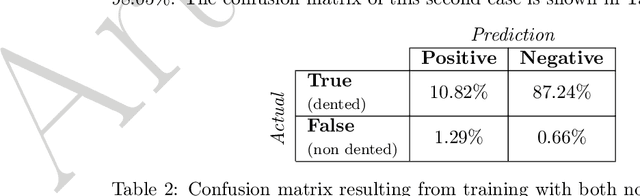
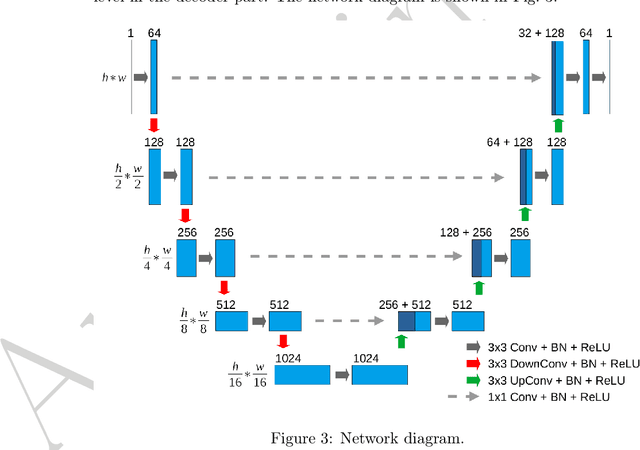
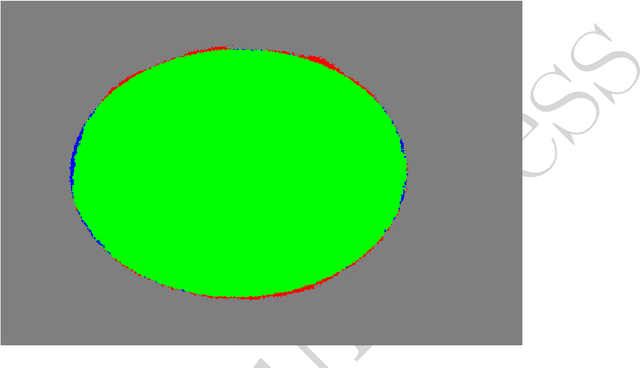
Dents on the aircraft skin are frequent and may easily go undetected during airworthiness checks, as their inspection process is tedious and extremely subject to human factors and environmental conditions. Nowadays, 3D scanning technologies are being proposed for more reliable, human-independent measurements, yet the process of inspection and reporting remains laborious and time consuming because data acquisition and validation are still carried out by the engineer. For full automation of dent inspection, the acquired point cloud data must be analysed via a reliable segmentation algorithm, releasing humans from the search and evaluation of damage. This paper reports on two developments towards automated dent inspection. The first is a method to generate a synthetic dataset of dented surfaces to train a fully convolutional neural network. The training of machine learning algorithms needs a substantial volume of dent data, which is not readily available. Dents are thus simulated in random positions and shapes, within criteria and definitions of a Boeing 737 structural repair manual. The noise distribution from the scanning apparatus is then added to reflect the complete process of 3D point acquisition on the training. The second proposition is a surface fitting strategy to convert 3D point clouds to 2.5D. This allows higher resolution point clouds to be processed with a small amount of memory compared with state-of-the-art methods involving 3D sampling approaches. Simulations with available ground truth data show that the proposed technique reaches an intersection-over-union of over 80%. Experiments over dent samples prove an effective detection of dents with a speed of over 500 000 points per second.
Time-Efficient Mars Exploration of Simultaneous Coverage and Charging with Multiple Drones
Nov 16, 2020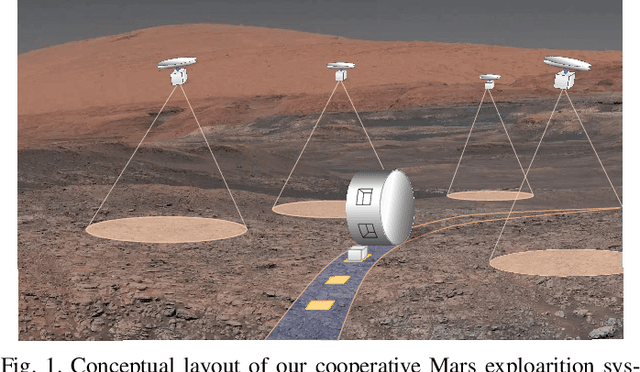
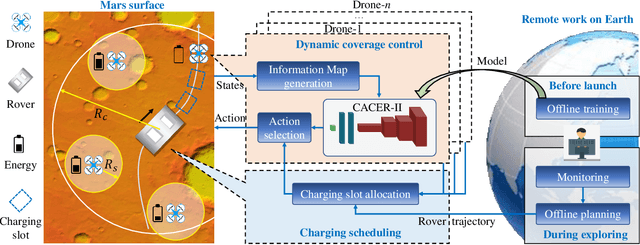
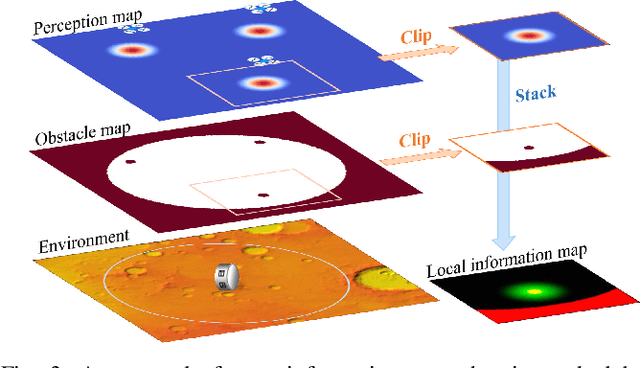
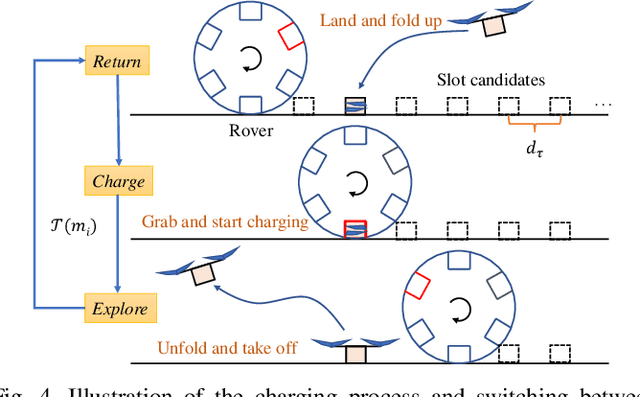
This paper presents a time-efficient scheme for Mars exploration by the cooperation of multiple drones and a rover. To maximize effective coverage of the Mars surface in the long run, a comprehensive framework has been developed with joint consideration for limited energy, sensor model, communication range and safety radius, which we call TIME-SC2 (TIme-efficient Mars Exploration of Simultaneous Coverage and Charging). First, we propose a multi-drone coverage control algorithm by leveraging emerging deep reinforcement learning and design a novel information map to represent dynamic system states. Second, we propose a near-optimal charging scheduling algorithm to navigate each drone to an individual charging slot, and we have proven that there always exists feasible solutions. The attractiveness of this framework not only resides on its ability to maximize exploration efficiency, but also on its high autonomy that has greatly reduced the non-exploring time. Extensive simulations have been conducted to demonstrate the remarkable performance of TIME-SC2 in terms of time-efficiency, adaptivity and flexibility.
Follow the Water: Finding Water, Snow and Clouds on Terrestrial Exoplanets with Photometry and Machine Learning
Mar 08, 2022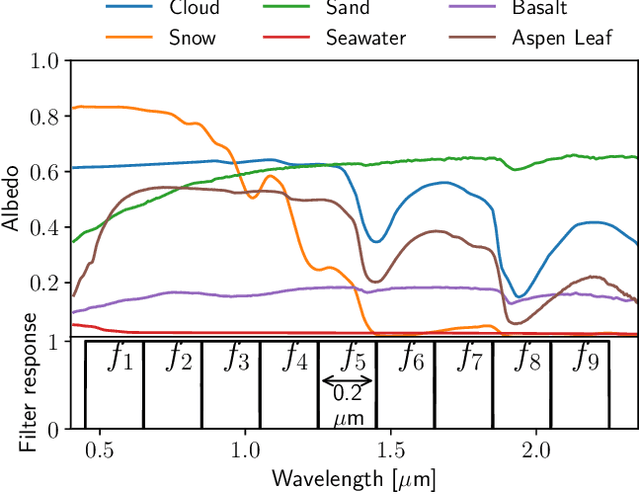
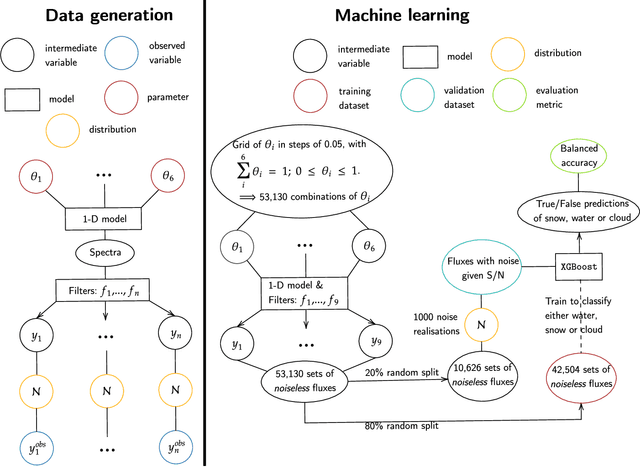
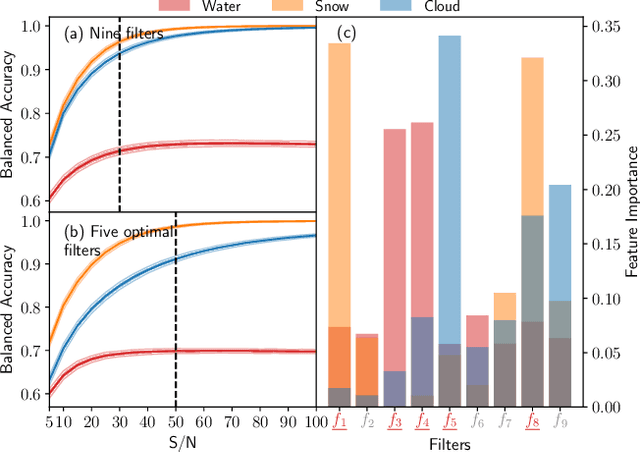
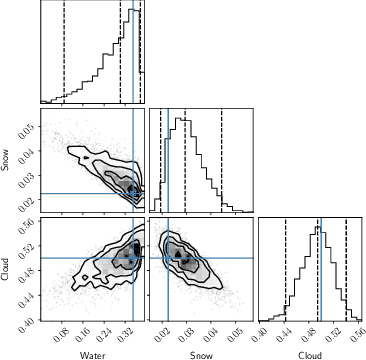
All life on Earth needs water. NASA's quest to follow the water links water to the search for life in the cosmos. Telescopes like JWST and mission concepts like HabEx, LUVOIR and Origins are designed to characterise rocky exoplanets spectroscopically. However, spectroscopy remains time-intensive and therefore, initial characterisation is critical to prioritisation of targets. Here, we study machine learning as a tool to assess water's existence through broadband-filter reflected photometric flux on Earth-like exoplanets in three forms: seawater, water-clouds and snow; based on 53,130 spectra of cold, Earth-like planets with 6 major surfaces. XGBoost, a well-known machine learning algorithm, achieves over 90\% balanced accuracy in detecting the existence of snow or clouds for S/N$\gtrsim 20$, and 70\% for liquid seawater for S/N $\gtrsim 30$. Finally, we perform mock Bayesian analysis with Markov-chain Monte Carlo with five filters identified to derive exact surface compositions to test for retrieval feasibility. The results show that the use of machine learning to identify water on the surface of exoplanets from broadband-filter photometry provides a promising initial characterisation tool of water in different forms. Planned small and large telescope missions could use this to aid their prioritisation of targets for time-intense follow-up observations.
Where to Look Next: Learning Viewpoint Recommendations for Informative Trajectory Planning
Mar 04, 2022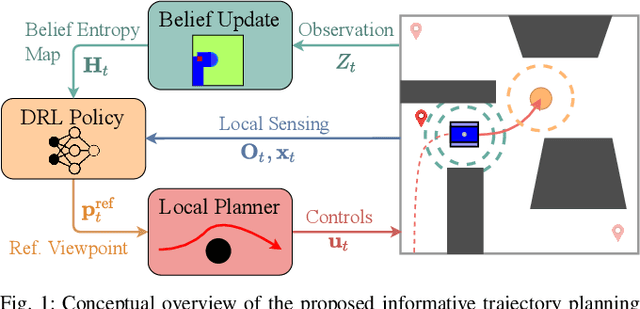
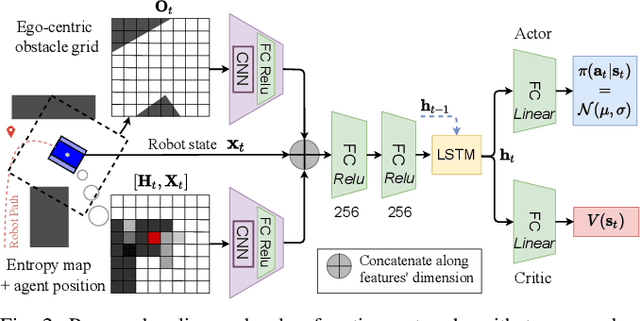
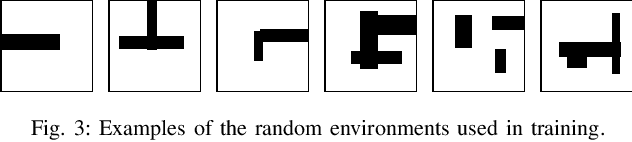
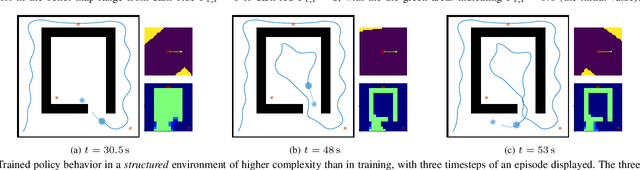
Search missions require motion planning and navigation methods for information gathering that continuously replan based on new observations of the robot's surroundings. Current methods for information gathering, such as Monte Carlo Tree Search, are capable of reasoning over long horizons, but they are computationally expensive. An alternative for fast online execution is to train, offline, an information gathering policy, which indirectly reasons about the information value of new observations. However, these policies lack safety guarantees and do not account for the robot dynamics. To overcome these limitations we train an information-aware policy via deep reinforcement learning, that guides a receding-horizon trajectory optimization planner. In particular, the policy continuously recommends a reference viewpoint to the local planner, such that the resulting dynamically feasible and collision-free trajectories lead to observations that maximize the information gain and reduce the uncertainty about the environment. In simulation tests in previously unseen environments, our method consistently outperforms greedy next-best-view policies and achieves competitive performance compared to Monte Carlo Tree Search, in terms of information gains and coverage time, with a reduction in execution time by three orders of magnitude.
A Soft-Bodied Aerial Robot for Collision Resilience and Contact-Reactive Perching
Apr 27, 2022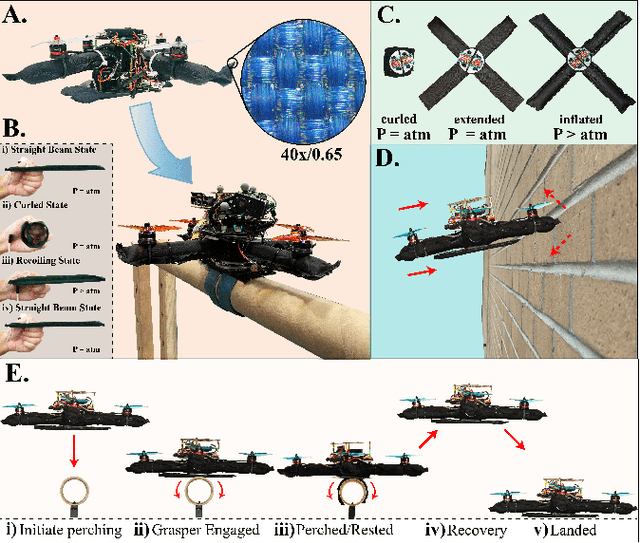
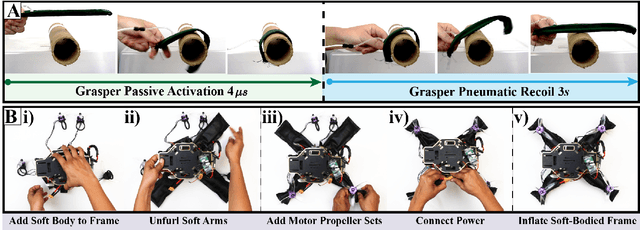
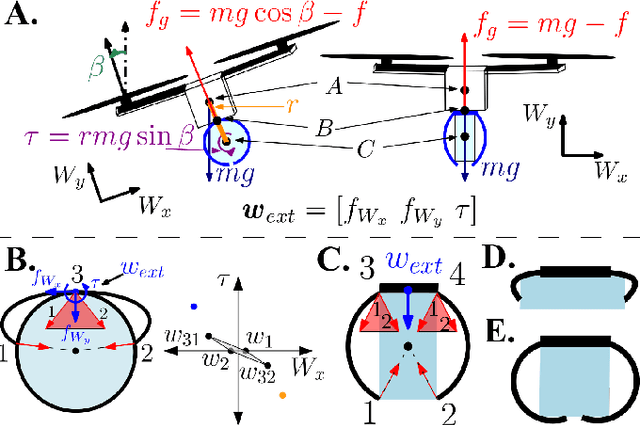
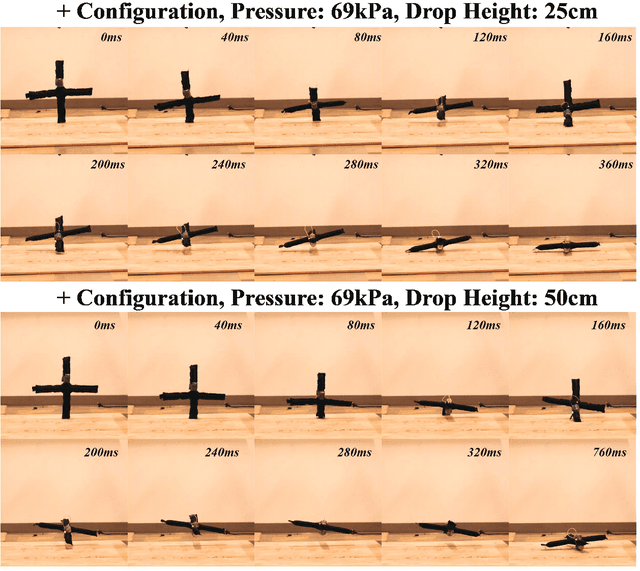
Compared to their biological counterparts, aerial robots demonstrate limited capabilities when tasked to interact in unstructured environments. Very often, the limitation lies in their inability to tolerate collisions and to successfully land, or perch, on objects of unknown shape. Over the past years, efforts to address this have introduced designs that incorporate mechanical impact protection and grasping/perching structures at the cost of reduced agility and flight time due to added weight and bulkiness. In this work, we develop a fabric-based, soft-bodied aerial robot (SoBAR) composed of both contact-reactive perching and embodied impact protection structures while remaining lightweight and streamlined. The robot is capable to 1) pneumatically vary its body stiffness for collision resilience and 2) utilize a hybrid fabric-based, bistable (HFB) grasper to perform passive grasping. When compared to conventional rigid drone frames the SoBAR successfully demonstrates its ability to dissipate impact from head-on collisions and maintain flight stability without any structural damage. Furthermore, in dynamic perching scenarios the HFB grasper is capable to convert impact energy upon contact into firm grasp through rapid body shape conforming in less than 4ms. We exhaustively study and offer insights for this novel perching scheme through grasping characterization, grasp wrench analysis, and experimental grasping validations in objects with various shapes. Finally, we demonstrate the complete control pipeline for SoBAR to approach an object, dynamically perch on it, recover from it, and land.