 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Integrated In-vehicle Monitoring System Using 3D Human Pose Estimation and Seat Belt Segmentation
Apr 17, 2022
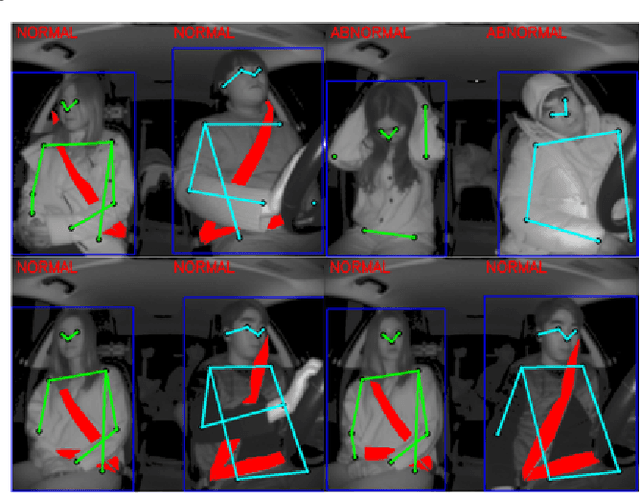
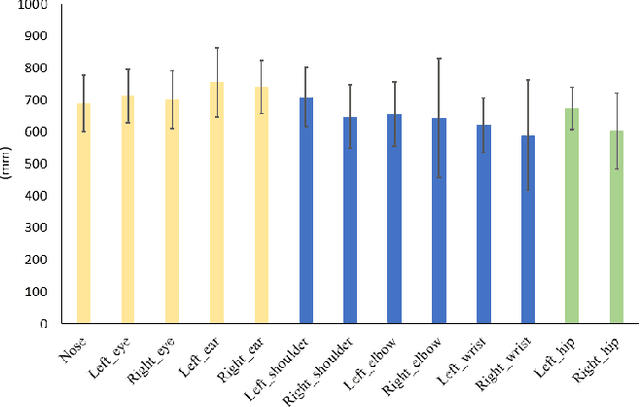
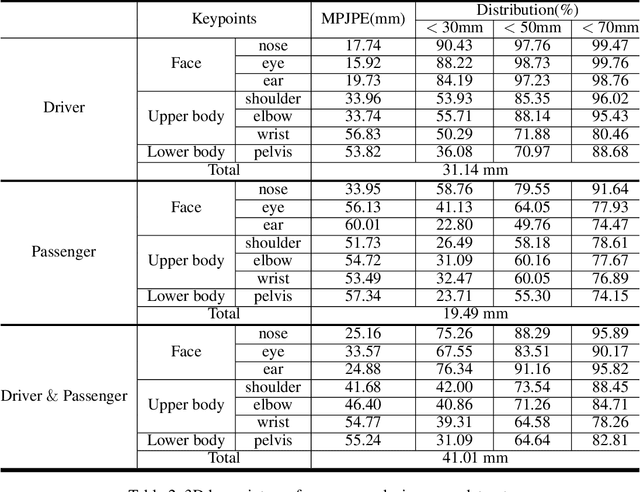
Recently, along with interest in autonomous vehicles, the importance of monitoring systems for both drivers and passengers inside vehicles has been increasing. This paper proposes a novel in-vehicle monitoring system the combines 3D pose estimation, seat-belt segmentation, and seat-belt status classification networks. Our system outputs various information necessary for monitoring by accurately considering the data characteristics of the in-vehicle environment. Specifically, the proposed 3D pose estimation directly estimates the absolute coordinates of keypoints for a driver and passengers, and the proposed seat-belt segmentation is implemented by applying a structure based on the feature pyramid. In addition, we propose a classification task to distinguish between normal and abnormal states of wearing a seat belt using results that combine 3D pose estimation with seat-belt segmentation. These tasks can be learned simultaneously and operate in real-time. Our method was evaluated on a private dataset we newly created and annotated. The experimental results show that our method has significantly high performance that can be applied directly to real in-vehicle monitoring systems.
Neural Conditional Event Time Models
Apr 03, 2020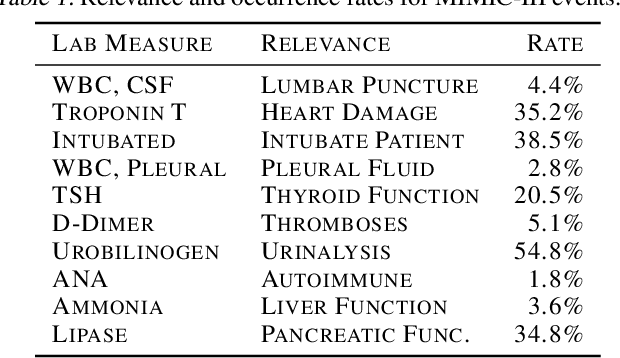
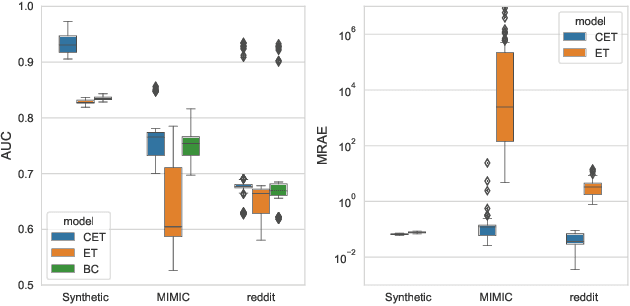
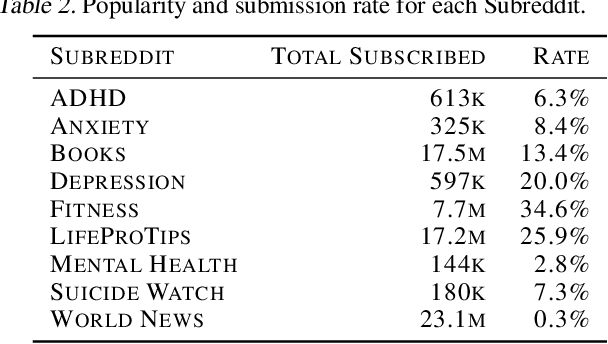
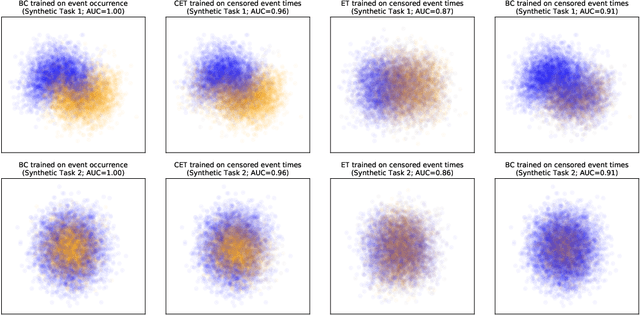
Event time models predict occurrence times of an event of interest based on known features. Recent work has demonstrated that neural networks achieve state-of-the-art event time predictions in a variety of settings. However, standard event time models suppose that the event occurs, eventually, in all cases. Consequently, no distinction is made between a) the probability of event occurrence, and b) the predicted time of occurrence. This distinction is critical when predicting medical diagnoses, equipment defects, social media posts, and other events that or may not occur, and for which the features affecting a) may be different from those affecting b). In this work, we develop a conditional event time model that distinguishes between these components, implement it as a neural network with a binary stochastic layer representing finite event occurrence, and show how it may be learned from right-censored event times via maximum likelihood estimation. Results demonstrate superior event occurrence and event time predictions on synthetic data, medical events (MIMIC-III), and social media posts (Reddit), comprising 21 total prediction tasks.
Global-Supervised Contrastive Loss and View-Aware-Based Post-Processing for Vehicle Re-Identification
Apr 17, 2022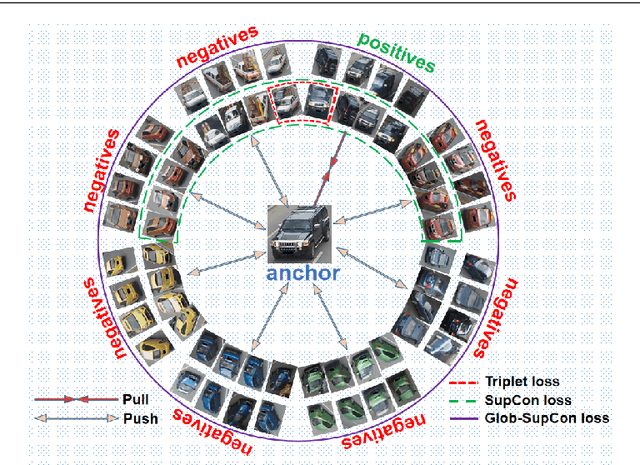
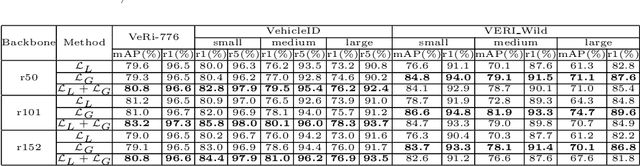
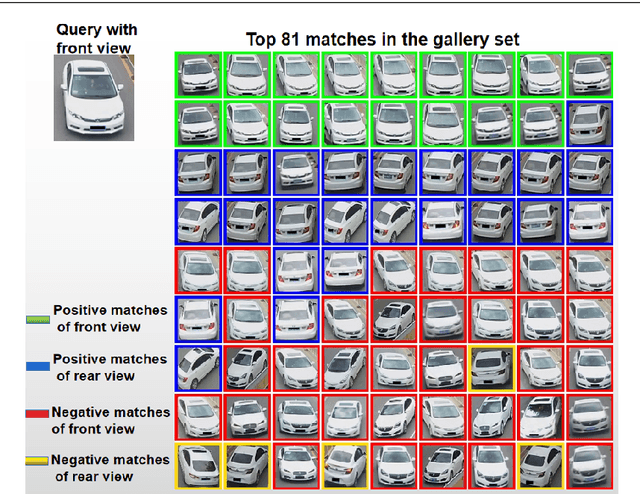

In this paper, we propose a Global-Supervised Contrastive loss and a view-aware-based post-processing (VABPP) method for the field of vehicle re-identification. The traditional supervised contrastive loss calculates the distances of features within the batch, so it has the local attribute. While the proposed Global-Supervised Contrastive loss has new properties and has good global attributes, the positive and negative features of each anchor in the training process come from the entire training set. The proposed VABPP method is the first time that the view-aware-based method is used as a post-processing method in the field of vehicle re-identification. The advantages of VABPP are that, first, it is only used during testing and does not affect the training process. Second, as a post-processing method, it can be easily integrated into other trained re-id models. We directly apply the view-pair distance scaling coefficient matrix calculated by the model trained in this paper to another trained re-id model, and the VABPP method greatly improves its performance, which verifies the feasibility of the VABPP method.
Phase-Based Signal Representations for Scattering
Feb 15, 2022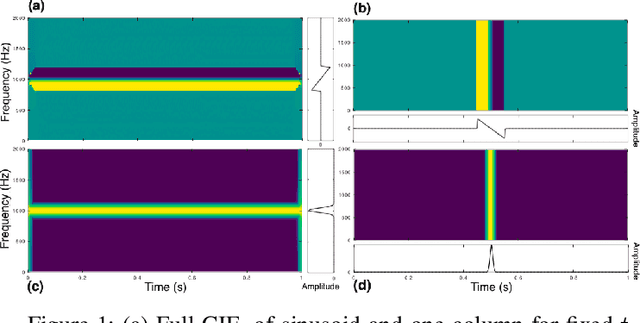
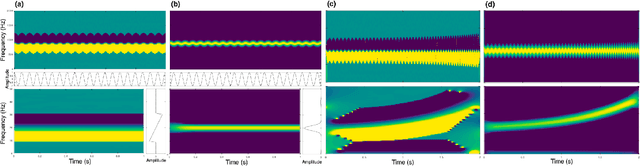
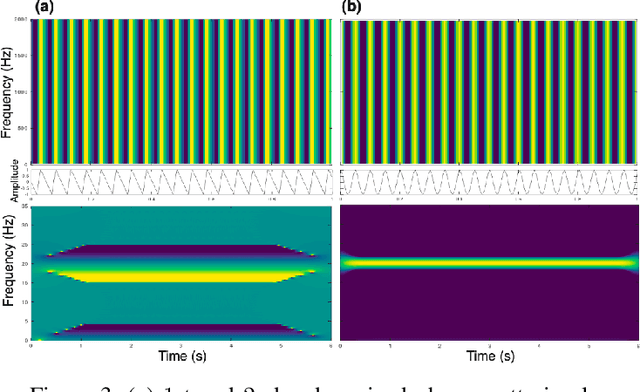
The scattering transform is a non-linear signal representation method based on cascaded wavelet transform magnitudes. In this paper we introduce phase scattering, a novel approach where we use phase derivatives in a scattering procedure. We first revisit phase-related concepts for representing time-frequency information of audio signals, in particular, the partial derivatives of the phase in the time-frequency domain. By putting analytical and numerical results in a new light, we set the basis to extend the phase-based representations to higher orders by means of a scattering transform, which leads to well localized signal representations of large-scale structures. All the ideas are introduced in a general way and then applied using the STFT.
Conformal prediction interval for dynamic time-series
Oct 18, 2020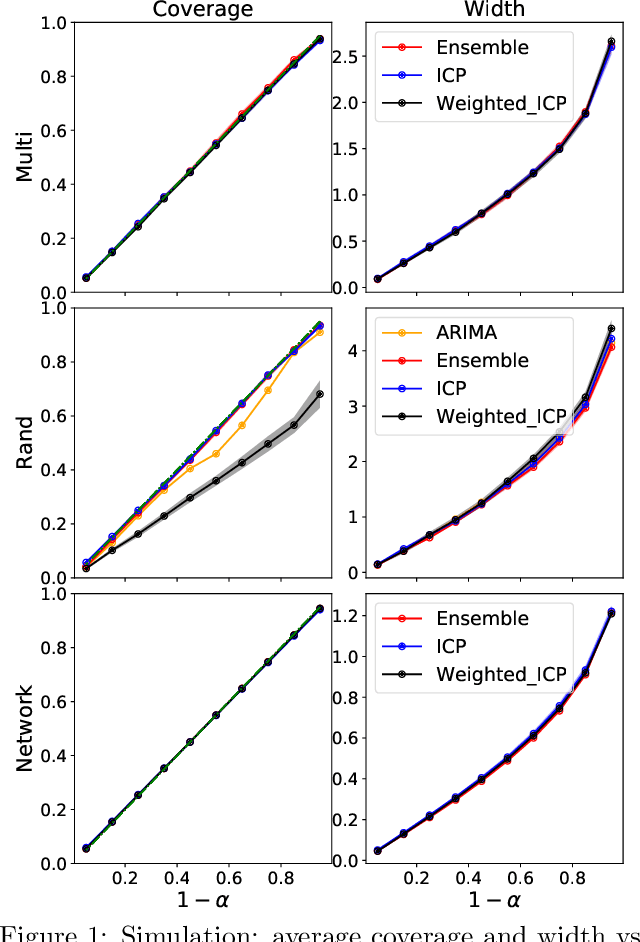
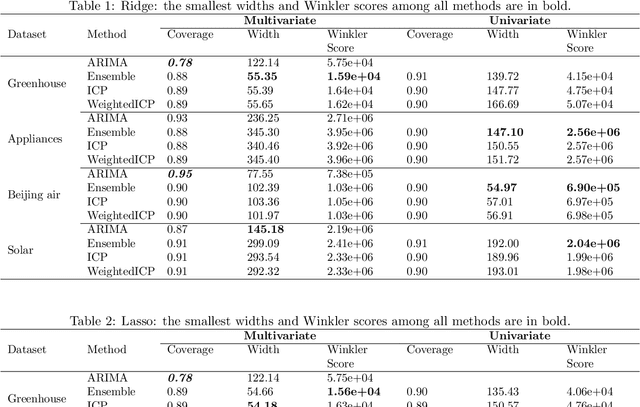
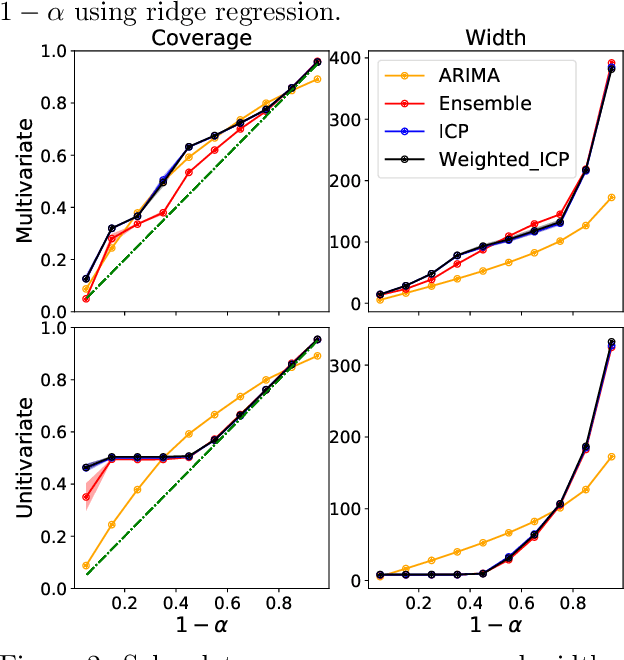
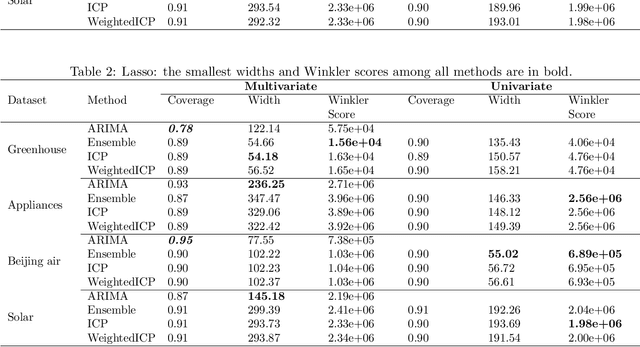
We develop a method to build distribution-free prediction intervals for time-series based on conformal inference, called \Verb|EnPI| that wraps around any ensemble estimator to construct sequential prediction intervals. \Verb|EnPI| is closely related to the conformal prediction (CP) framework but does not require data exchangeability. Theoretically, these intervals attain finite-sample, approximately valid average coverage for broad classes of regression functions and time-series with strongly mixing stochastic errors. Computationally, \Verb|EnPI| requires no training of multiple ensemble estimators; it efficiently operates around an already trained ensemble estimator. In general, \Verb|EnPI| is easy to implement, scalable to producing arbitrarily many prediction intervals sequentially, and well-suited to a wide range of regression functions. We perform extensive simulations and real-data analyses to demonstrate its effectiveness.
Sensing RISs: Enabling Dimension-Independent CSI Acquisition for Beamforming
Apr 28, 2022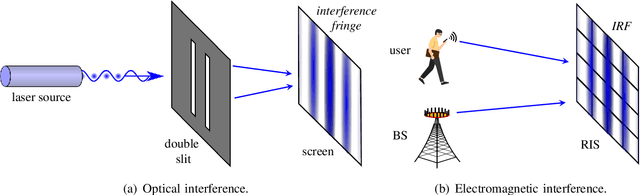
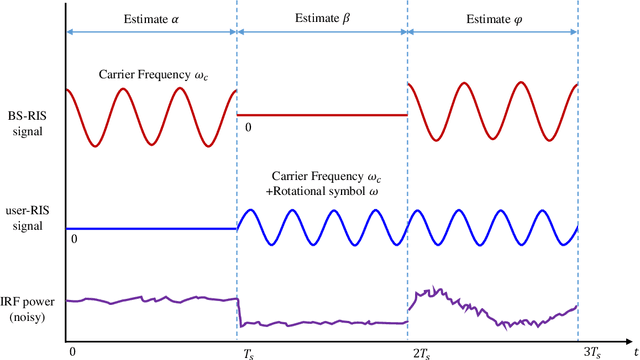
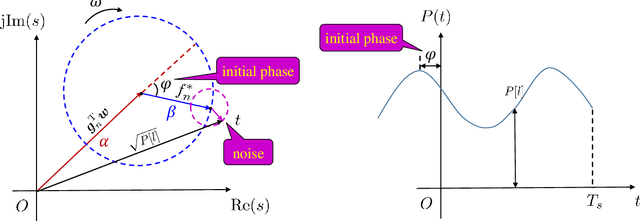
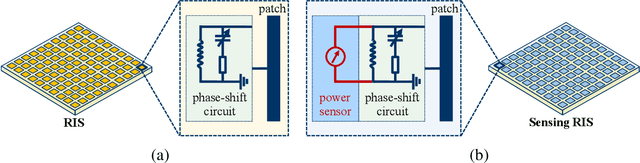
Reconfigurable intelligent surfaces (RISs) are envisioned as a potentially transformative technology for future wireless communications. However, RIS's inability to process signals and their attendant increased channel dimension have brought new challenges to RIS-assisted systems, which greatly increases the pilot overhead required for channel estimation. To address these problems, several prior contributions that enhance the hardware architecture of RISs or develop algorithms to exploit the channels' mathematical properties have been made, where the required pilot overhead is reduced to be proportional to the number of RIS elements. In this paper, we propose a dimension-independent channel state information (CSI) acquisition approach in which the required pilot overhead is independent of the number of RIS elements. Specifically, in contrast to traditional signal transmission methods, where signals from the base station (BS) and the users are transmitted in different time slots, we propose a novel method in which signals are transmitted from the BS and the user simultaneously during CSI acquisition. Under this method, an electromagnetic interference random field (IRF) will be induced on the RIS, and we employ a sensing RIS to capture its features. Moreover, we develop three algorithms for parameter estimation in this system, and also derive the Cramer-Rao lower bound (CRLB) and an asymptotic expression for it. Simulation results verify that our proposed signal transmission method and the corresponding algorithms can achieve dimension-independent CSI acquisition for beamforming.
Change Detection from Synthetic Aperture Radar Images via Dual Path Denoising Network
Mar 13, 2022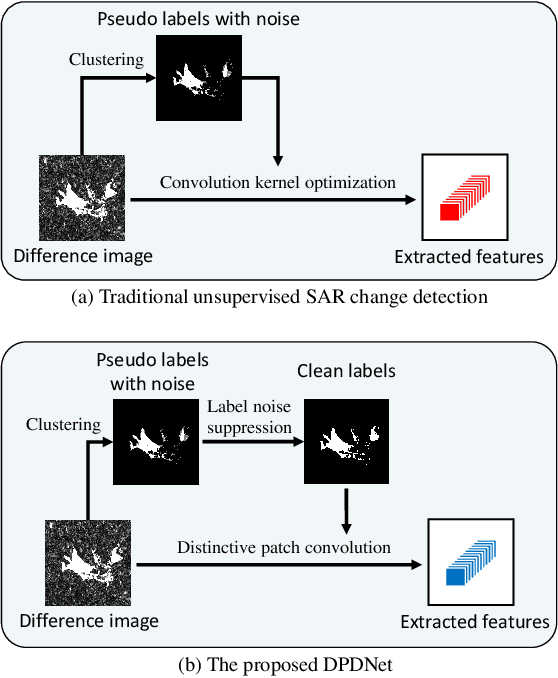
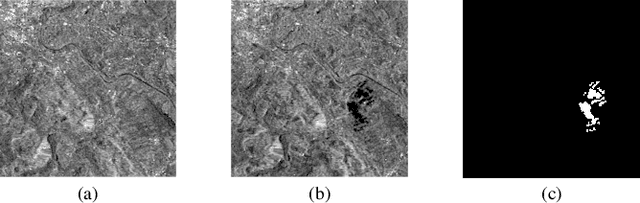
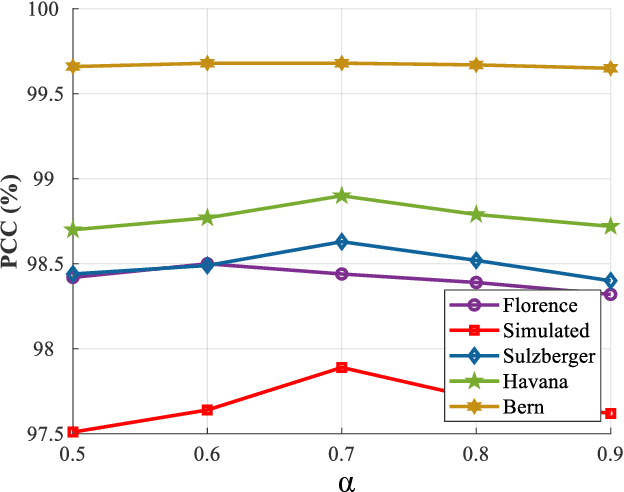
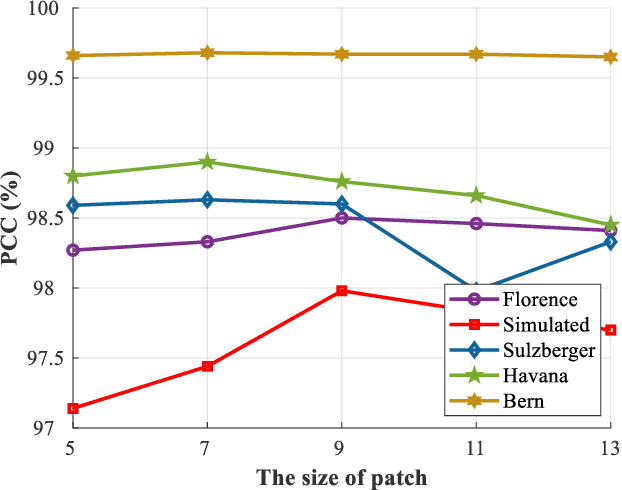
Benefited from the rapid and sustainable development of synthetic aperture radar (SAR) sensors, change detection from SAR images has received increasing attentions over the past few years. Existing unsupervised deep learning-based methods have made great efforts to exploit robust feature representations, but they consume much time to optimize parameters. Besides, these methods use clustering to obtain pseudo-labels for training, and the pseudo-labeled samples often involve errors, which can be considered as "label noise". To address these issues, we propose a Dual Path Denoising Network (DPDNet) for SAR image change detection. In particular, we introduce the random label propagation to clean the label noise involved in preclassification. We also propose the distinctive patch convolution for feature representation learning to reduce the time consumption. Specifically, the attention mechanism is used to select distinctive pixels in the feature maps, and patches around these pixels are selected as convolution kernels. Consequently, the DPDNet does not require a great number of training samples for parameter optimization, and its computational efficiency is greatly enhanced. Extensive experiments have been conducted on five SAR datasets to verify the proposed DPDNet. The experimental results demonstrate that our method outperforms several state-of-the-art methods in change detection results.
MAP-SNN: Mapping Spike Activities with Multiplicity, Adaptability, and Plasticity into Bio-Plausible Spiking Neural Networks
Apr 21, 2022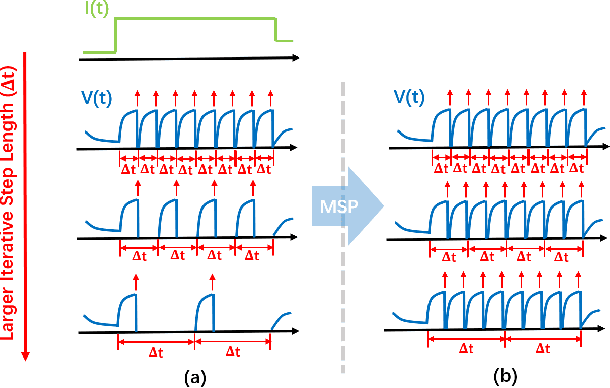
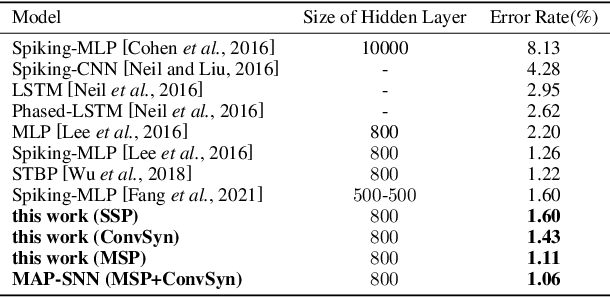
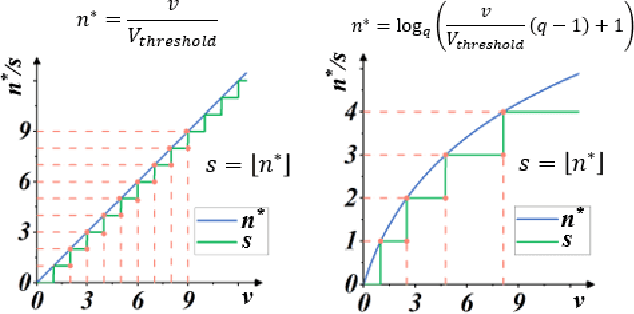
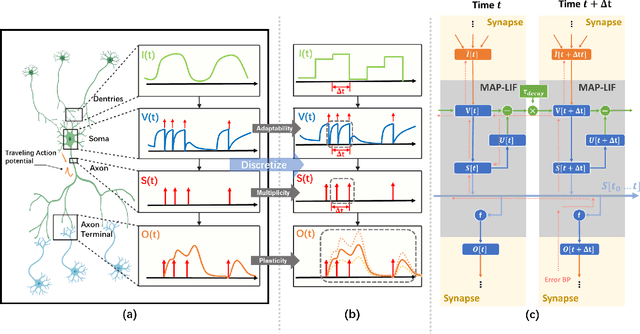
Spiking Neural Network (SNN) is considered more biologically realistic and power-efficient as it imitates the fundamental mechanism of the human brain. Recently, backpropagation (BP) based SNN learning algorithms that utilize deep learning frameworks have achieved good performance. However, bio-interpretability is partially neglected in those BP-based algorithms. Toward bio-plausible BP-based SNNs, we consider three properties in modeling spike activities: Multiplicity, Adaptability, and Plasticity (MAP). In terms of multiplicity, we propose a Multiple-Spike Pattern (MSP) with multiple spike transmission to strengthen model robustness in discrete time-iteration. To realize adaptability, we adopt Spike Frequency Adaption (SFA) under MSP to decrease spike activities for improved efficiency. For plasticity, we propose a trainable convolutional synapse that models spike response current to enhance the diversity of spiking neurons for temporal feature extraction. The proposed SNN model achieves competitive performances on neuromorphic datasets: N-MNIST and SHD. Furthermore, experimental results demonstrate that the proposed three aspects are significant to iterative robustness, spike efficiency, and temporal feature extraction capability of spike activities. In summary, this work proposes a feasible scheme for bio-inspired spike activities with MAP, offering a new neuromorphic perspective to embed biological characteristics into spiking neural networks.
pysamoo: Surrogate-Assisted Multi-Objective Optimization in Python
Apr 12, 2022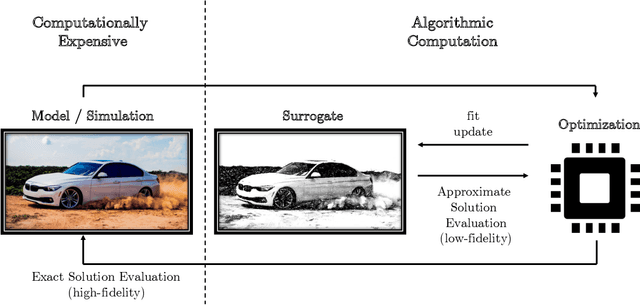
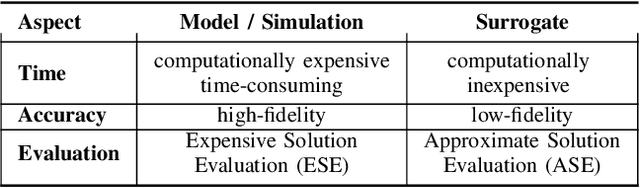
Significant effort has been made to solve computationally expensive optimization problems in the past two decades, and various optimization methods incorporating surrogates into optimization have been proposed. However, most optimization toolboxes do not consist of ready-to-run algorithms for computationally expensive problems, especially in combination with other key requirements, such as handling multiple conflicting objectives or constraints. Thus, the lack of appropriate software packages has become a bottleneck for solving real-world applications. The proposed framework, pysamoo, addresses these shortcomings of existing optimization frameworks and provides multiple optimization methods for handling problems involving time-consuming evaluation functions. The framework extends the functionalities of pymoo, a popular and comprehensive toolbox for multi-objective optimization, and incorporates surrogates to support expensive function evaluations. The framework is available under the GNU Affero General Public License (AGPL) and is primarily designed for research purposes. For more information about pysamoo, readers are encouraged to visit: anyoptimization.com/projects/pysamoo.
Hitchhiker: A Quadrotor Aggressively Perching on a Moving Inclined Surface Using Compliant Suction Cup Gripper
Mar 04, 2022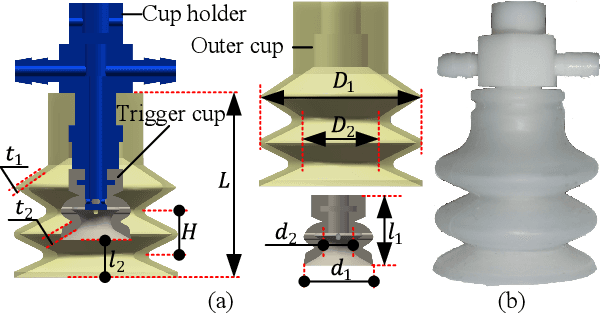
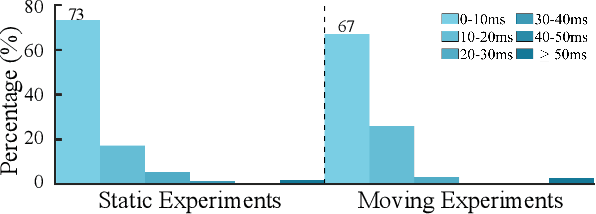
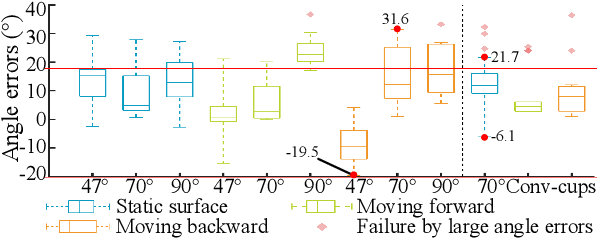
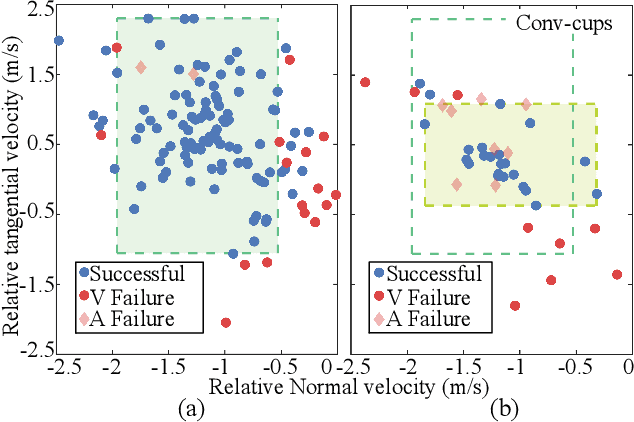
Perching on surfaces of moving objects, like vehicles, could extend the flight times and range of quadrotors. For surfaces attachment, suction cups are usually adopted due to their durability and large adhesion force. To seal on surfaces, suction cups are required to be aligned with surfaces and match to the frictions on end faces induced by relative tangential velocity. However, when the object surface is moving and inclined such that an aggressive maneuver is required, the attitude and relative velocity errors of quadrotors would become significant, which poses challenges to perch. To address the problem, we proposed a real-time trajectory planning algorithm to alleviate the velocity errors of quadrotors relative to moving surfaces. Multimodal search in dynamic time-domain is developed in the algorithm and thus the time-optimal aggressive trajectories can be efficiently generated. To further adapt to the residual attitude and relative velocity errors, we design a compliant gripper using self-sealing cups. Multiple cups in different directions are integrated into a wheel-like mechanism to increase the tolerance to attitude errors. The wheel mechanism in the gripper also eliminates the requirement of matching the attitude and tangential velocity and thus increases the adaptability to tangential velocity. Extensive tests are conducted, including comparison experiments, to perch on static and moving surfaces at various inclinations. Results demonstrate that our proposed system enables a quadrotor to reliably perch on static and moving inclined (up to 1.18$m/s$ and 90$^\circ$) surfaces with a success rate of 70\% or higher. The trajectory planner is valid and efficient. Compared to conventional suction cup grippers in moving surface perching, our gripper has larger adaptability to attitude errors and tangential velocities, and the success rate increases by 45\%.