 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Model Selection, Adaptation, and Combination for Deep Transfer Learning through Neural Networks in Renewable Energies
Apr 28, 2022
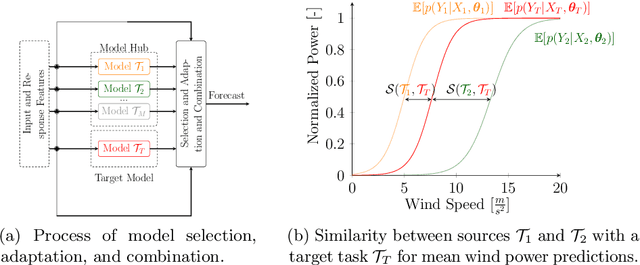
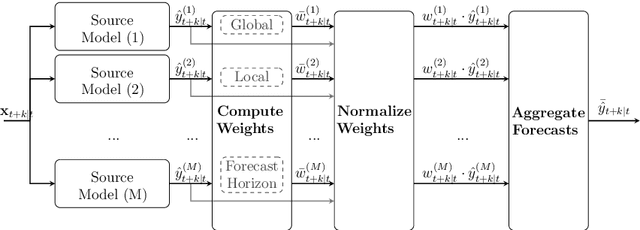
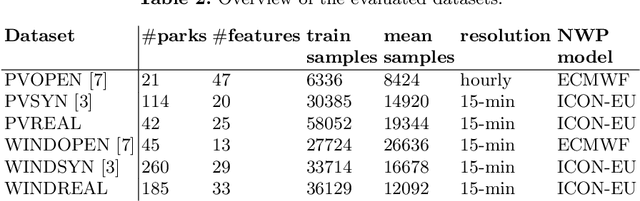
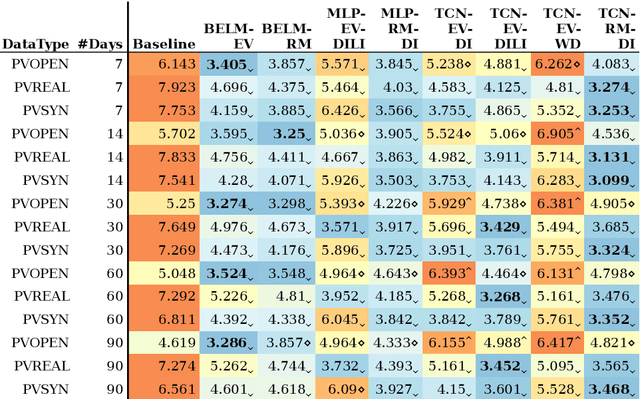
There is recent interest in using model hubs, a collection of pre-trained models, in computer vision tasks. To utilize the model hub, we first select a source model and then adapt the model for the target to compensate for differences. While there is yet limited research on a model selection and adaption for computer vision tasks, this holds even more for the field of renewable power. At the same time, it is a crucial challenge to provide forecasts for the increasing demand for power forecasts based on weather features from a numerical weather prediction. We close these gaps by conducting the first thorough experiment for model selection and adaptation for transfer learning in renewable power forecast, adopting recent results from the field of computer vision on six datasets. We adopt models based on data from different seasons and limit the amount of training data. As an extension of the current state of the art, we utilize a Bayesian linear regression for forecasting the response based on features extracted from a neural network. This approach outperforms the baseline with only seven days of training data. We further show how combining multiple models through ensembles can significantly improve the model selection and adaptation approach. In fact, with more than 30 days of training data, both proposed model combination techniques achieve similar results to those models trained with a full year of training data.
Automatic calibration of time of flight based non-line-of-sight reconstruction
May 21, 2021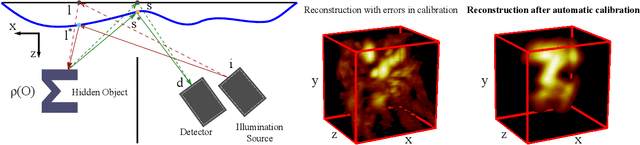
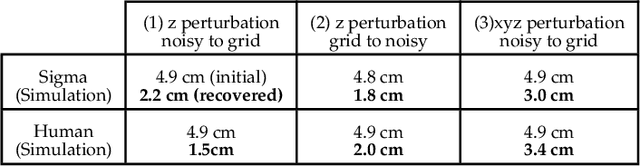
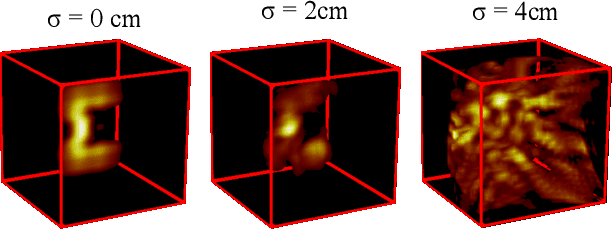

Time of flight based Non-line-of-sight (NLOS) imaging approaches require precise calibration of illumination and detector positions on the visible scene to produce reasonable results. If this calibration error is sufficiently high, reconstruction can fail entirely without any indication to the user. In this work, we highlight the necessity of building autocalibration into NLOS reconstruction in order to handle mis-calibration. We propose a forward model of NLOS measurements that is differentiable with respect to both, the hidden scene albedo, and virtual illumination and detector positions. With only a mean squared error loss and no regularization, our model enables joint reconstruction and recovery of calibration parameters by minimizing the measurement residual using gradient descent. We demonstrate our method is able to produce robust reconstructions using simulated and real data where the calibration error applied causes other state of the art algorithms to fail.
A9-Dataset: Multi-Sensor Infrastructure-Based Dataset for Mobility Research
Apr 13, 2022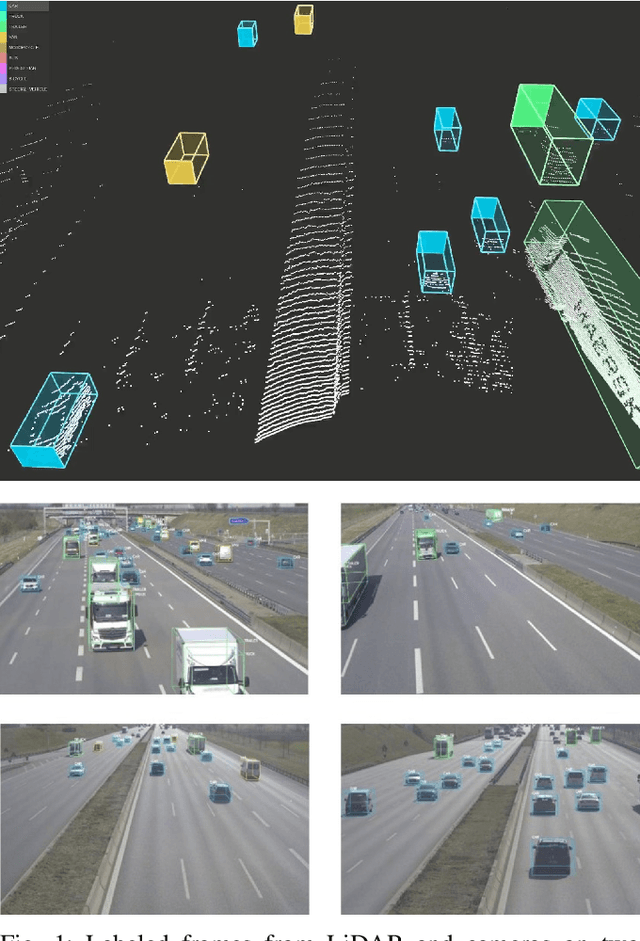
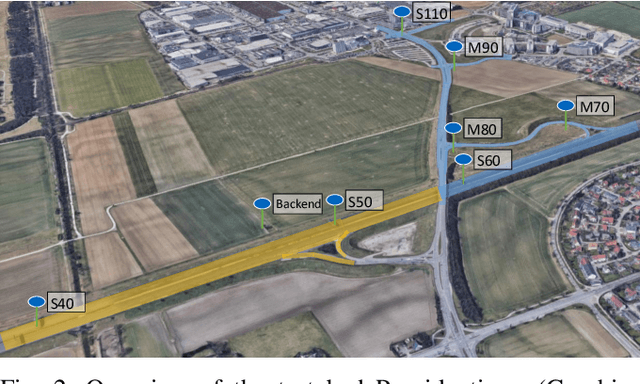

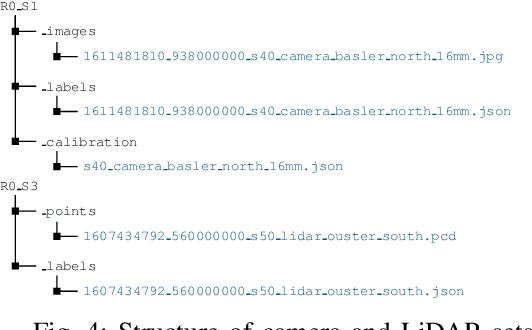
Data-intensive machine learning based techniques increasingly play a prominent role in the development of future mobility solutions - from driver assistance and automation functions in vehicles, to real-time traffic management systems realized through dedicated infrastructure. The availability of high quality real-world data is often an important prerequisite for the development and reliable deployment of such systems in large scale. Towards this endeavour, we present the A9-Dataset based on roadside sensor infrastructure from the 3 km long Providentia++ test field near Munich in Germany. The dataset includes anonymized and precision-timestamped multi-modal sensor and object data in high resolution, covering a variety of traffic situations. As part of the first set of data, which we describe in this paper, we provide camera and LiDAR frames from two overhead gantry bridges on the A9 autobahn with the corresponding objects labeled with 3D bounding boxes. The first set includes in total more than 1000 sensor frames and 14000 traffic objects. The dataset is available for download at https://a9-dataset.com.
APAN: Asynchronous Propagation Attention Network for Real-time Temporal Graph Embedding
Dec 16, 2020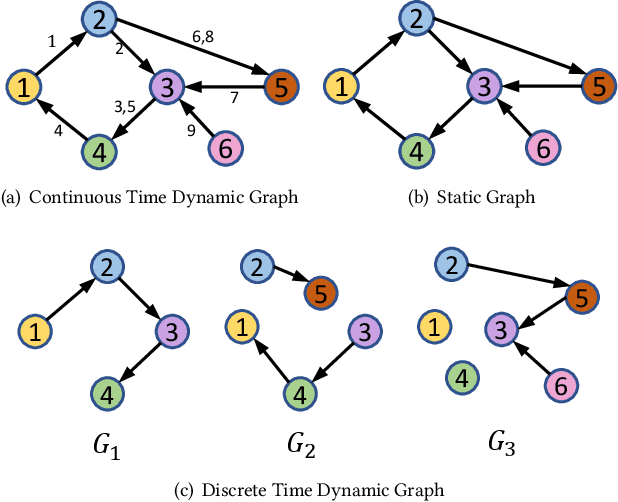
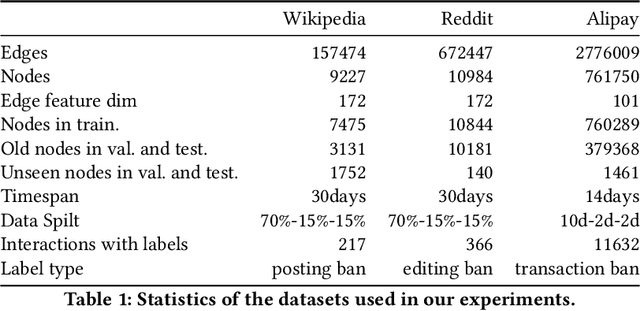
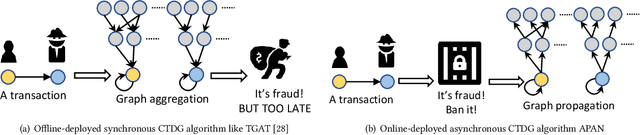
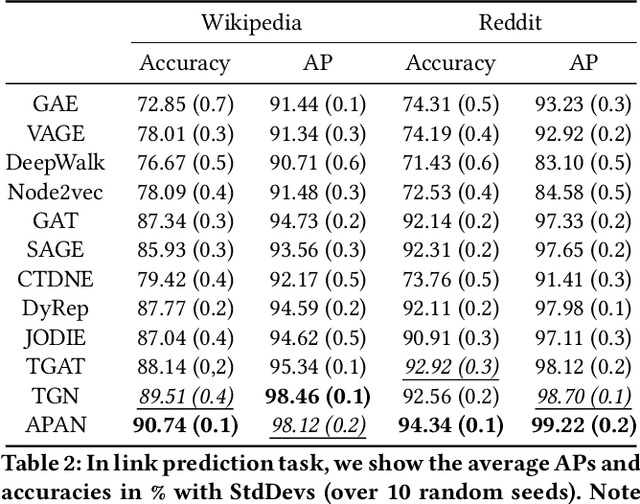
Limited by the time complexity of querying k-hop neighbors in a graph database, most graph algorithms cannot be deployed online and execute millisecond-level inference. This problem dramatically limits the potential of applying graph algorithms in certain areas, such as financial fraud detection. Therefore, we propose Asynchronous Propagation Attention Network, an asynchronous continuous time dynamic graph algorithm for real-time temporal graph embedding. Traditional graph models usually execute two serial operations: first graph computation and then model inference. We decouple model inference and graph computation step so that the heavy graph query operations will not damage the speed of model inference. Extensive experiments demonstrate that the proposed method can achieve competitive performance and 8.7 times inference speed improvement in the meantime.
Time-Aware Evidence Ranking for Fact-Checking
Sep 10, 2020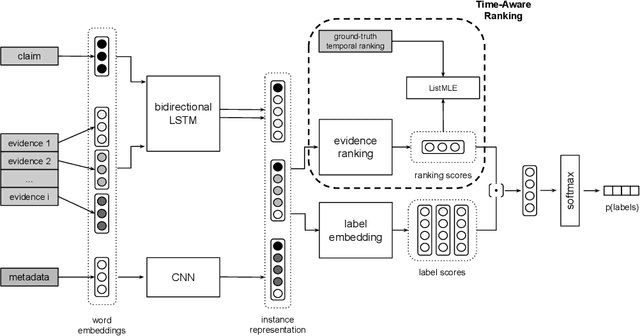
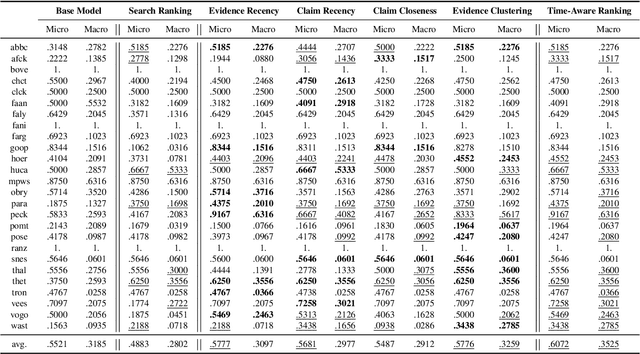
Truth can vary over time. Therefore, fact-checking decisions on claim veracity should take into account temporal information of both the claim and supporting or refuting evidence. Automatic fact-checking models typically take claims and evidence pages as input, and previous work has shown that weighing or ranking these evidence pages by their relevance to the claim is useful. However, the temporal information of the evidence pages is not generally considered when defining evidence relevance. In this work, we investigate the hypothesis that the timestamp of an evidence page is crucial to how it should be ranked for a given claim. We delineate four temporal ranking methods that constrain evidence ranking differently: evidence-based recency, claim-based recency, claim-centered closeness and evidence-centered clustering ranking. Subsequently, we simulate hypothesis-specific evidence rankings given the evidence timestamps as gold standard. Evidence ranking is then optimized using a learning to rank loss function. The best performing time-aware fact-checking model outperforms its baseline by up to 33.34%, depending on the domain. Overall, evidence-based recency and evidence-centered clustering ranking lead to the best results. Our study reveals that time-aware evidence ranking not only surpasses relevance assumptions based purely on semantic similarity or position in a search results list, but also improves veracity predictions of time-sensitive claims in particular.
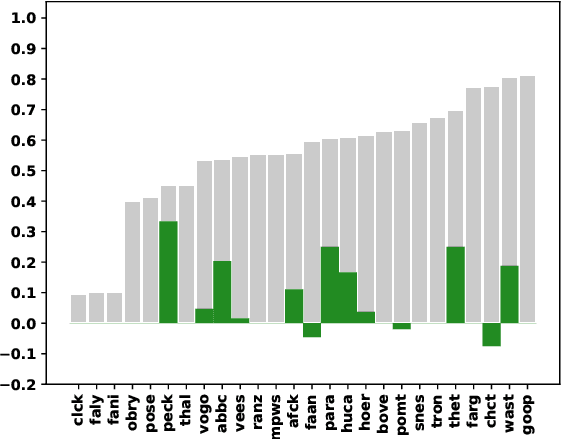
TopTemp: Parsing Precipitate Structure from Temper Topology
Apr 01, 2022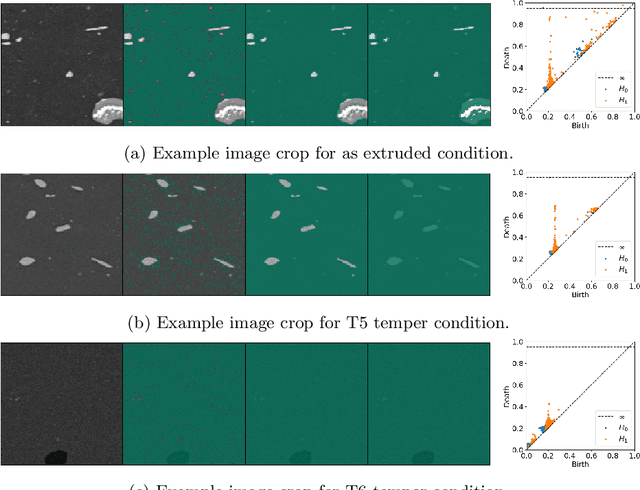
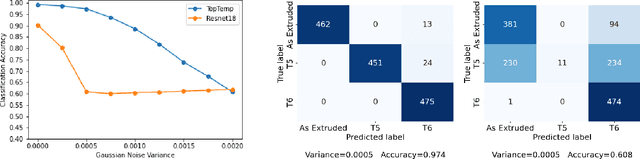
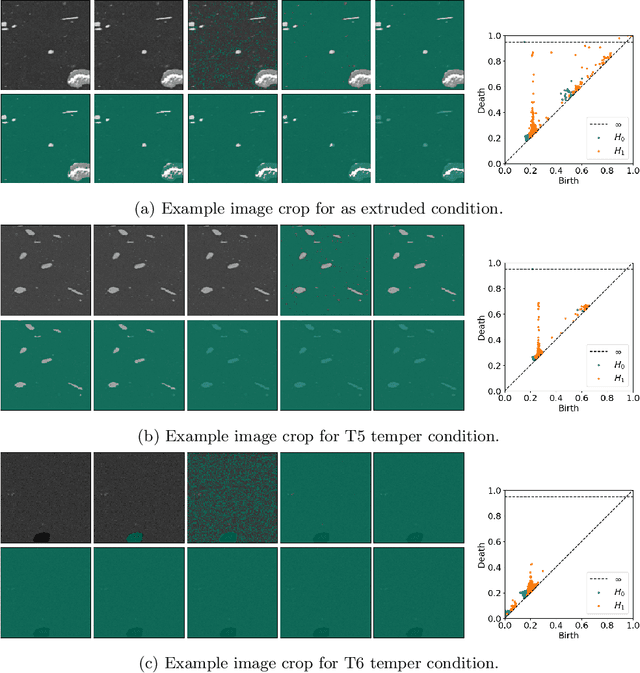
Technological advances are in part enabled by the development of novel manufacturing processes that give rise to new materials or material property improvements. Development and evaluation of new manufacturing methodologies is labor-, time-, and resource-intensive expensive due to complex, poorly defined relationships between advanced manufacturing process parameters and the resulting microstructures. In this work, we present a topological representation of temper (heat-treatment) dependent material micro-structure, as captured by scanning electron microscopy, called TopTemp. We show that this topological representation is able to support temper classification of microstructures in a data limited setting, generalizes well to previously unseen samples, is robust to image perturbations, and captures domain interpretable features. The presented work outperforms conventional deep learning baselines and is a first step towards improving understanding of process parameters and resulting material properties.
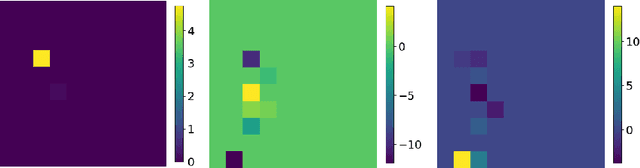
An Adaptive and Scalable ANN-based Model-Order-Reduction Method for Large-Scale TO Designs
Mar 20, 2022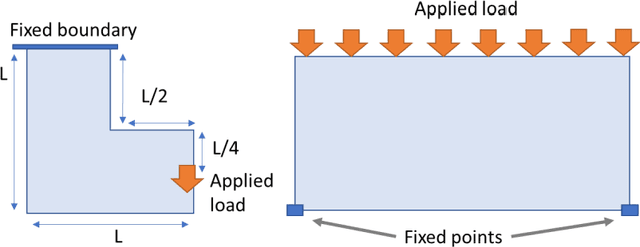

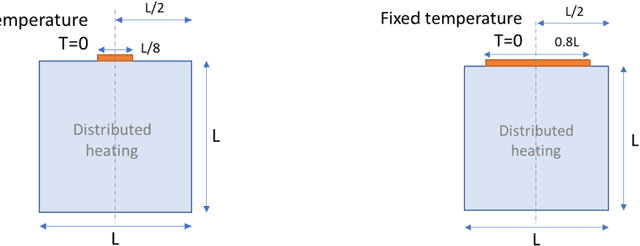

Topology Optimization (TO) provides a systematic approach for obtaining structure design with optimum performance of interest. However, the process requires numerical evaluation of objective function and constraints at each iteration, which is computational expensive especially for large-scale design. Deep learning-based models have been developed to accelerate the process either by acting as surrogate models replacing the simulation process, or completely replacing the optimization process. However, most of them require a large set of labelled training data, which are generated mostly through simulations. The data generation time scales rapidly with the design domain size, decreasing the efficiency of the method itself. Another major issue is the weak generalizability of most deep learning models. Most models are trained to work with the design problem similar to that used for data generation and require retraining if the design problem changes. In this work a scalable deep learning-based model-order-reduction method is proposed to accelerate large-scale TO process, by utilizing MapNet, a neural network which maps the field of interest from coarse-scale to fine-scale. The proposed method allows for each simulation of the TO process to be performed at a coarser mesh, thereby greatly reducing the total computational time. Moreover, by using domain fragmentation, the transferability of the MapNet is largely improved. Specifically, it has been demonstrated that the MapNet trained using data from one cantilever beam design with a specific loading condition can be directly applied to other structure design problems with different domain shapes, sizes, boundary and loading conditions.
Hybrid Cloud-Edge Collaborative Data Anomaly Detection in Industrial Sensor Networks
Apr 21, 2022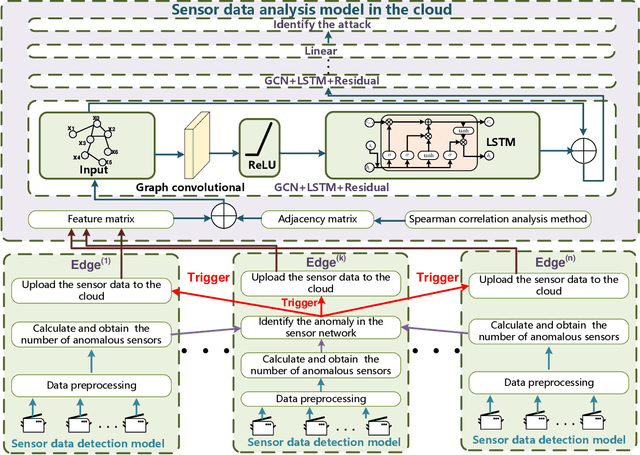
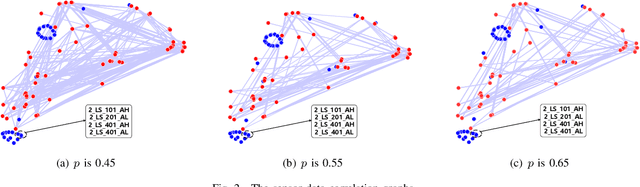
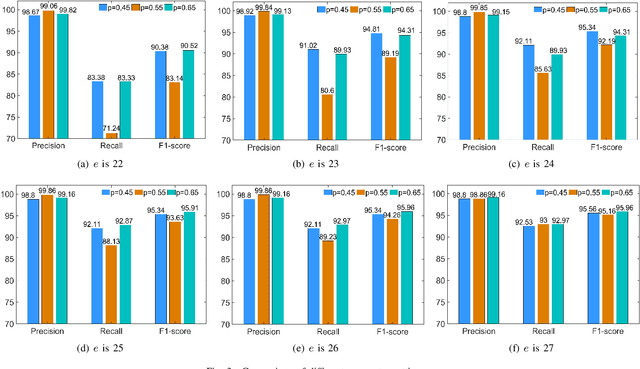
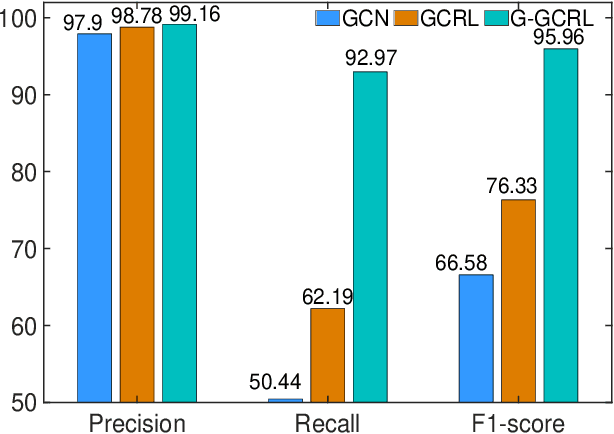
Industrial control systems (ICSs) are facing increasing cyber-physical attacks that can cause catastrophes in the physical system. Efficient anomaly detection models in the industrial sensor networks are essential for enhancing ICS reliability and security, due to the sensor data is related to the operational state of the ICS. Considering the limited availability of computing resources, this paper proposes a hybrid anomaly detection approach in cloud-edge collaboration industrial sensor networks. The hybrid approach consists of sensor data detection models deployed at the edges and a sensor data analysis model deployed in the cloud. The sensor data detection model based on Gaussian and Bayesian algorithms can detect the anomalous sensor data in real-time and upload them to the cloud for further analysis, filtering the normal sensor data and reducing traffic load. The sensor data analysis model based on Graph convolutional network, Residual algorithm and Long short-term memory network (GCRL) can effectively extract the spatial and temporal features and then identify the attack precisely. The proposed hybrid anomaly detection approach is evaluated using a benchmark dataset and baseline anomaly detection models. The experimental results show that the proposed approach can achieve an overall 11.19% increase in Recall and an impressive 14.29% improvement in F1-score, compared with the existing models.
Indoor Localization for Quadrotors using Invisible Projected Tags
Mar 01, 2022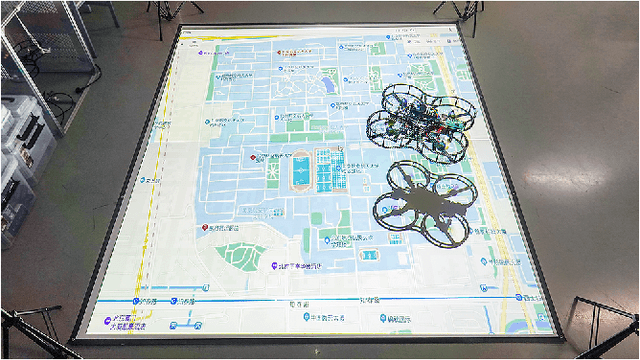
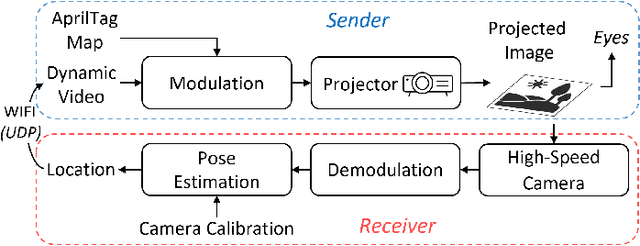
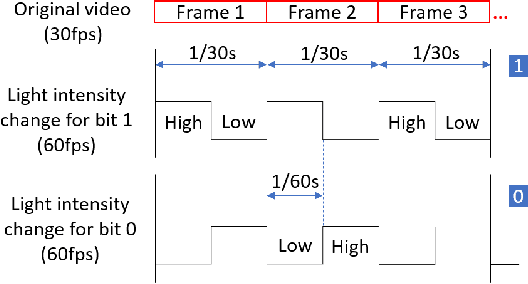
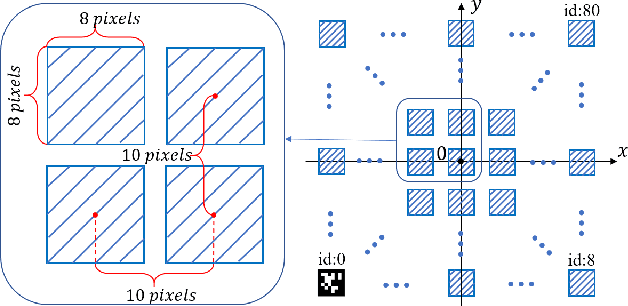
Augmented reality (AR) technology has been introduced into the robotics field to narrow the visual gap between indoor and outdoor environments. However, without signals from satellite navigation systems, flight experiments in these indoor AR scenarios need other accurate localization approaches. This work proposes a real-time centimeter-level indoor localization method based on psycho-visually invisible projected tags (IPT), requiring a projector as the sender and quadrotors with high-speed cameras as the receiver. The method includes a modulation process for the sender, as well as demodulation and pose estimation steps for the receiver, where screen-camera communication technology is applied to hide fiducial tags using human vision property. Experiments have demonstrated that IPT can achieve accuracy within ten centimeters and a speed of about ten FPS. Compared with other localization methods for AR robotics platforms, IPT is affordable by using only a projector and high-speed cameras as hardware consumption and convenient by omitting a coordinate alignment step. To the authors' best knowledge, this is the first time screen-camera communication is utilized for AR robot localization.
Automatic Segmentation of Aircraft Dents in Point Clouds
May 03, 2022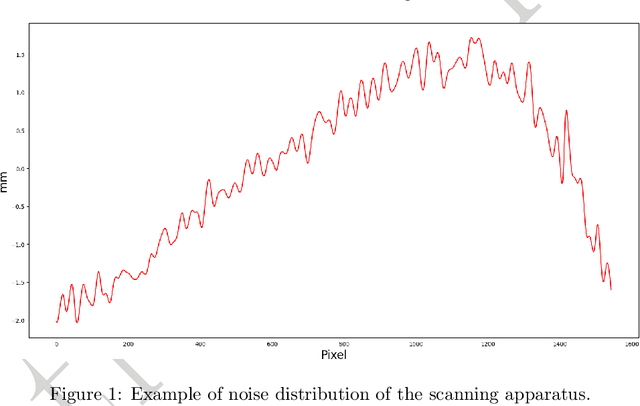
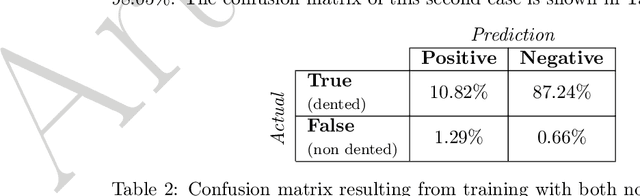
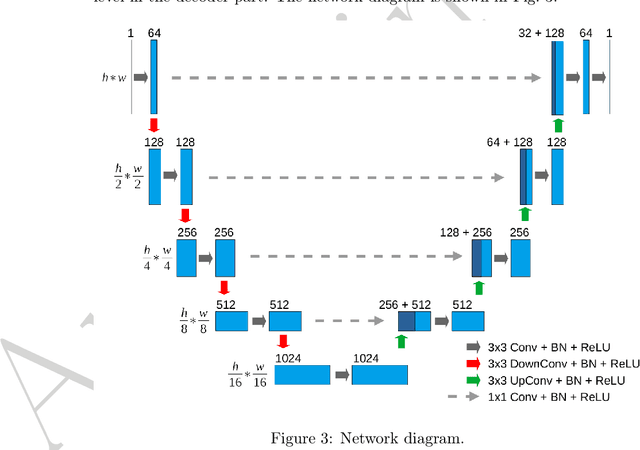
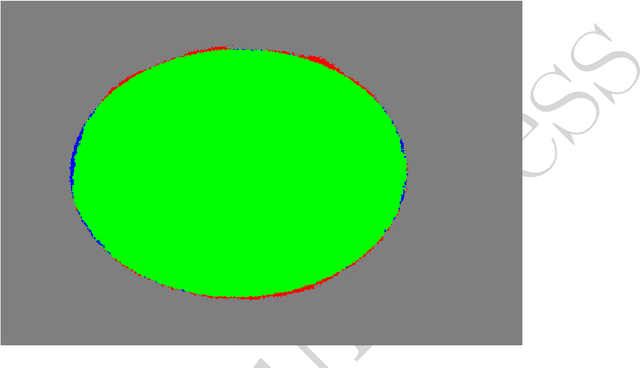
Dents on the aircraft skin are frequent and may easily go undetected during airworthiness checks, as their inspection process is tedious and extremely subject to human factors and environmental conditions. Nowadays, 3D scanning technologies are being proposed for more reliable, human-independent measurements, yet the process of inspection and reporting remains laborious and time consuming because data acquisition and validation are still carried out by the engineer. For full automation of dent inspection, the acquired point cloud data must be analysed via a reliable segmentation algorithm, releasing humans from the search and evaluation of damage. This paper reports on two developments towards automated dent inspection. The first is a method to generate a synthetic dataset of dented surfaces to train a fully convolutional neural network. The training of machine learning algorithms needs a substantial volume of dent data, which is not readily available. Dents are thus simulated in random positions and shapes, within criteria and definitions of a Boeing 737 structural repair manual. The noise distribution from the scanning apparatus is then added to reflect the complete process of 3D point acquisition on the training. The second proposition is a surface fitting strategy to convert 3D point clouds to 2.5D. This allows higher resolution point clouds to be processed with a small amount of memory compared with state-of-the-art methods involving 3D sampling approaches. Simulations with available ground truth data show that the proposed technique reaches an intersection-over-union of over 80%. Experiments over dent samples prove an effective detection of dents with a speed of over 500 000 points per second.