 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Dynamic Network-Code Design for Satellite Networks
Apr 04, 2022
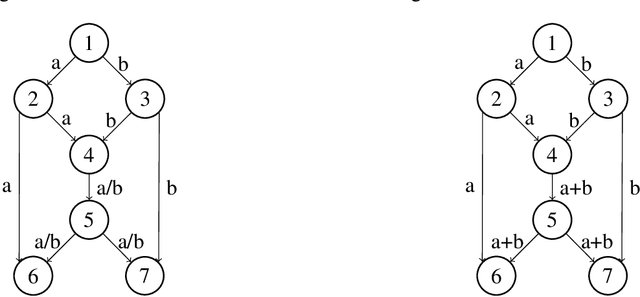
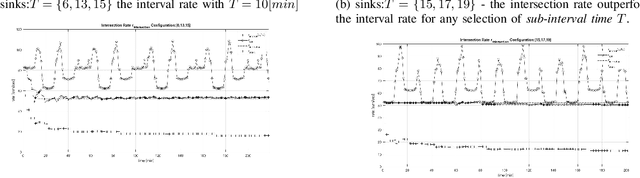
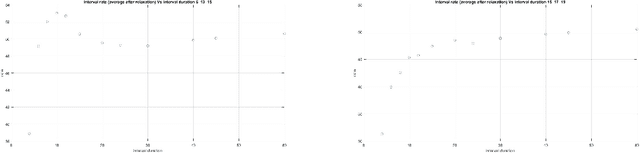
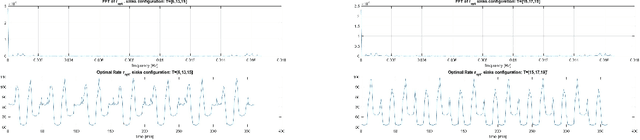
Internet access from space enjoys renaissance as satellites in Mega-Constellations is no longer fictitious. Network capacity, subject to power and computational complexity constraints among other challenges, is a major goal in this type of networks. This work studies Network Coding in the presence of dynamically changing network conditions. The notion of generalized acyclic network is introduced and employed for promoting the generation of linear-multicast network code for what is considered to be a cyclic network. The performance of several network coding schemes, among these is the known static network code, is evaluated by a STK simulation for a swarm of communicating satellites, conceptually based on the Iridium system. Exploiting the prior knowledge of the networks topology over time, new network coding approaches are described, whose aim is to better cope with the time-varying, dynamic behavior of the network. It is demonstrated that in all cases, pertaining to our example network, static network codes under-perform compared to the presented approach. In addition, an efficient test for identifying the most appropriate coding approach is presented.
Crop Type Identification for Smallholding Farms: Analyzing Spatial, Temporal and Spectral Resolutions in Satellite Imagery
May 06, 2022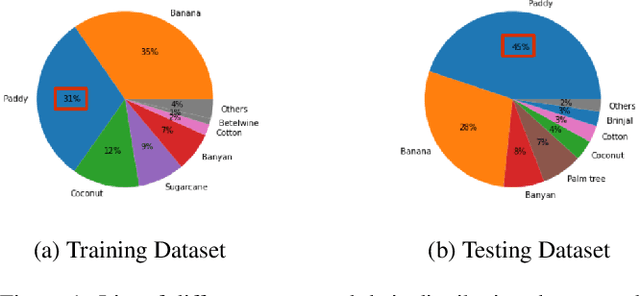
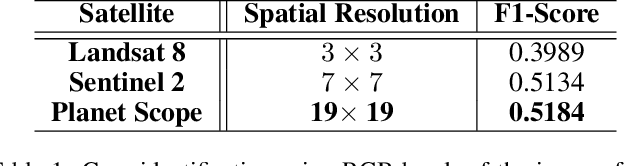
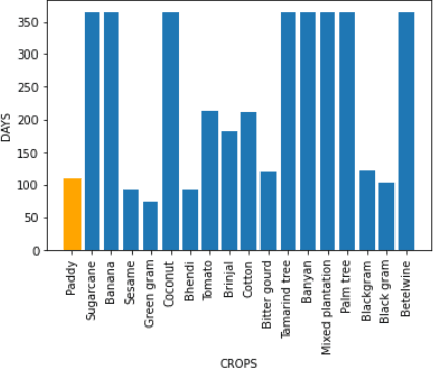
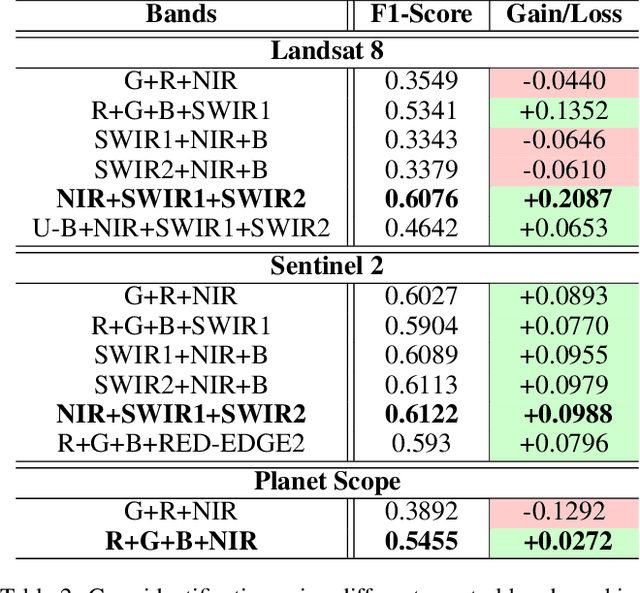
The integration of the modern Machine Learning (ML) models into remote sensing and agriculture has expanded the scope of the application of satellite images in the agriculture domain. In this paper, we present how the accuracy of crop type identification improves as we move from medium-spatiotemporal-resolution (MSTR) to high-spatiotemporal-resolution (HSTR) satellite images. We further demonstrate that high spectral resolution in satellite imagery can improve prediction performance for low spatial and temporal resolutions (LSTR) images. The F1-score is increased by 7% when using multispectral data of MSTR images as compared to the best results obtained from HSTR images. Similarly, when crop season based time series of multispectral data is used we observe an increase of 1.2% in the F1-score. The outcome motivates further advancements in the field of synthetic band generation.
Convolutional recurrent autoencoder network for learning underwater ocean acoustics
Apr 12, 2022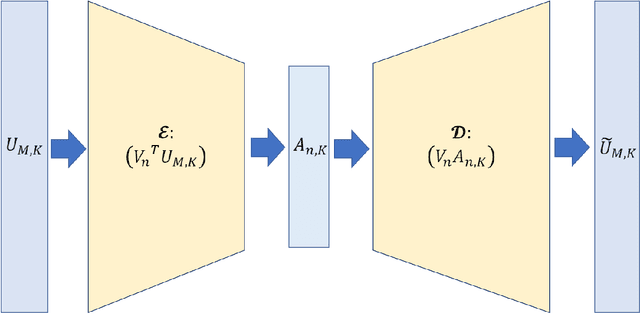
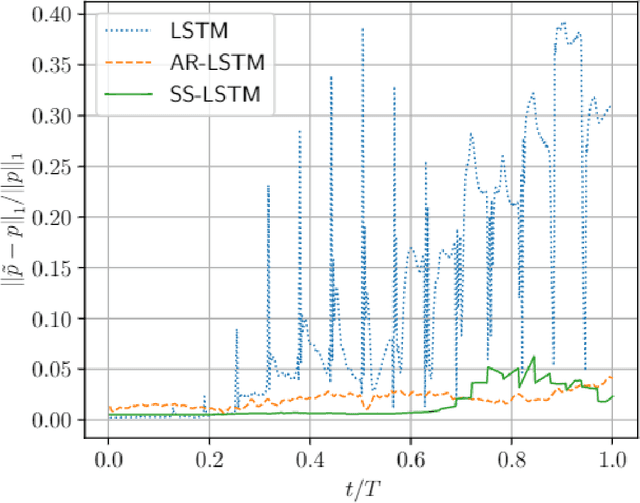
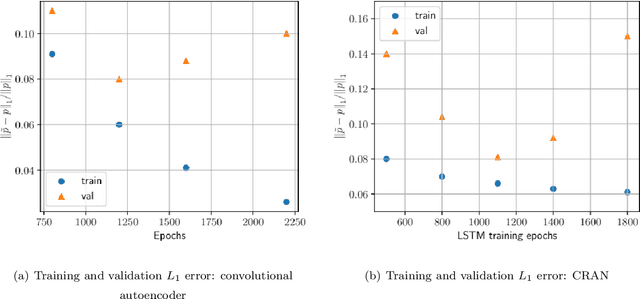
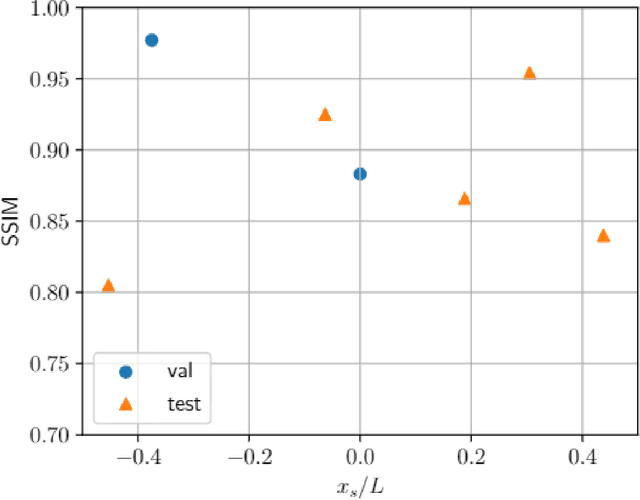
Underwater ocean acoustics is a complex physical phenomenon involving not only widely varying physical parameters and dynamical scales but also uncertainties in the ocean parameters. Thus, it is difficult to construct generalized physical models which can work in a broad range of situations. In this regard, we propose a convolutional recurrent autoencoder network (CRAN) architecture, which is a data-driven deep learning model for acoustic propagation. Being data-driven it is independent of how the data is obtained and can be employed for learning various ocean acoustic phenomena. The CRAN model can learn a reduced-dimensional representation of physical data and can predict the system evolution efficiently. Two cases of increasing complexity are considered to demonstrate the generalization ability of the CRAN. The first case is a one-dimensional wave propagation with spatially-varying discontinuous initial conditions. The second case corresponds to a far-field transmission loss distribution in a two-dimensional ocean domain with depth-dependent sources. For both cases, the CRAN can learn the essential elements of wave propagation physics such as characteristic patterns while predicting long-time system evolution with satisfactory accuracy. Such ability of the CRAN to learn complex ocean acoustics phenomena has the potential of real-time prediction for marine vessel decision-making and online control.
A Spatial-Temporal Attention Multi-Graph Convolution Network for Ride-Hailing Demand Prediction Based on Periodicity with Offset
Apr 08, 2022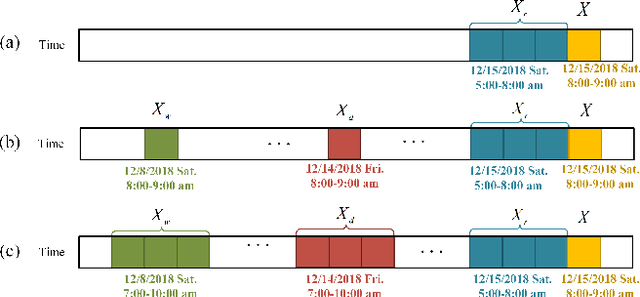
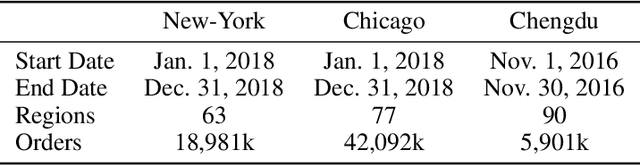
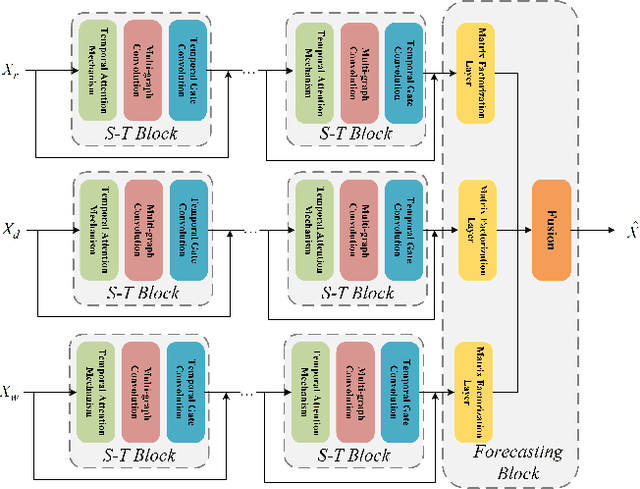
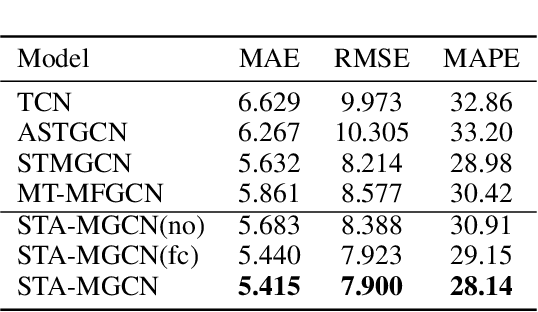
Ride-hailing service is becoming a leading part in urban transportation. To improve the efficiency of ride-hailing service, accurate prediction of transportation demand is a fundamental challenge. In this paper, we tackle this problem from both aspects of network structure and data-set formulation. For network design, we propose a spatial-temporal attention multi-graph convolution network (STA-MGCN). A spatial-temporal layer in STA-MGCN is developed to capture the temporal correlations by temporal attention mechanism and temporal gate convolution, and the spatial correlations by multigraph convolution. A feature cluster layer is introduced to learn latent regional functions and to reduce the computation burden. For the data-set formulation, we develop a novel approach which considers the transportation feature of periodicity with offset. Instead of only using history data during the same time period, the history order demand in forward and backward neighboring time periods from yesterday and last week are also included. Extensive experiments on the three real-world datasets of New-York, Chicago and Chengdu show that the proposed algorithm achieves the state-of-the-art performance for ride-hailing demand prediction.
Machine learning and atomic layer deposition: predicting saturation times from reactor growth profiles using artificial neural networks
May 10, 2022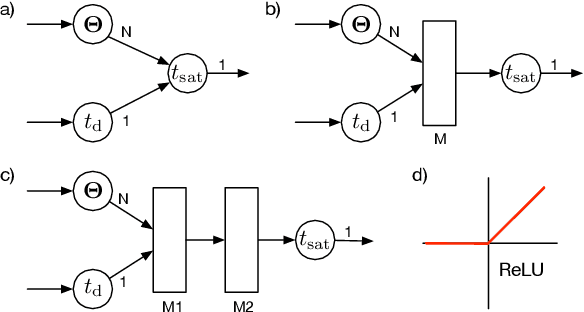
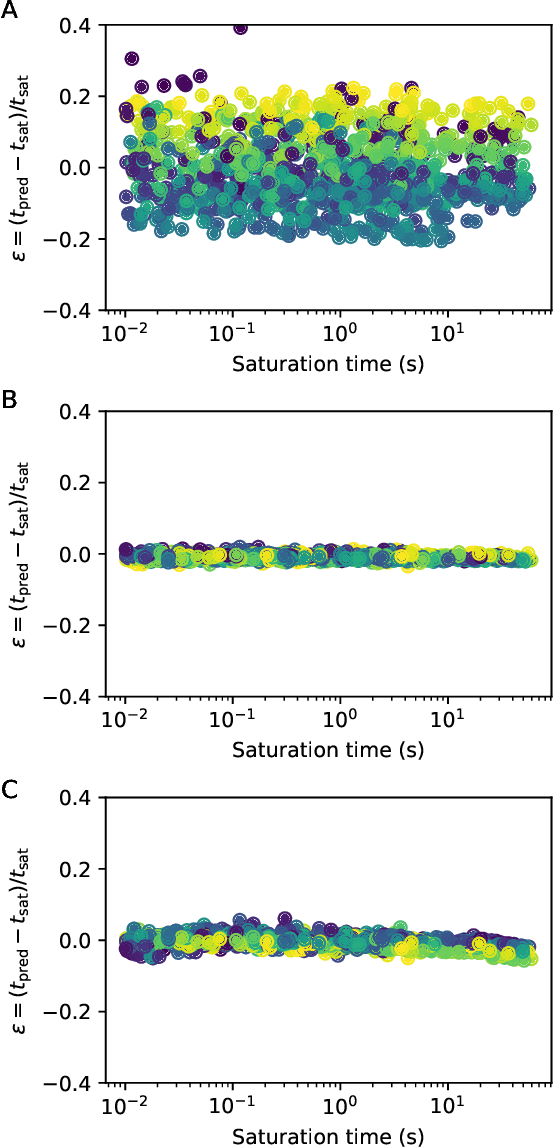
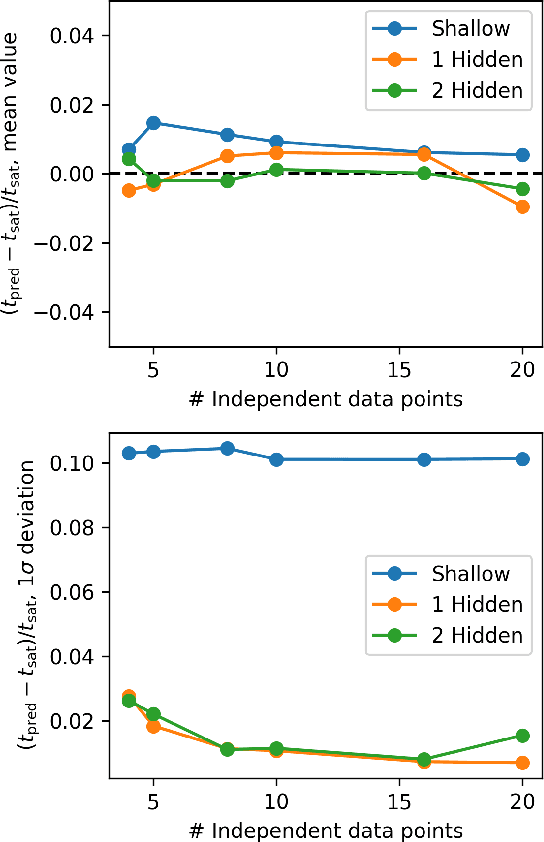
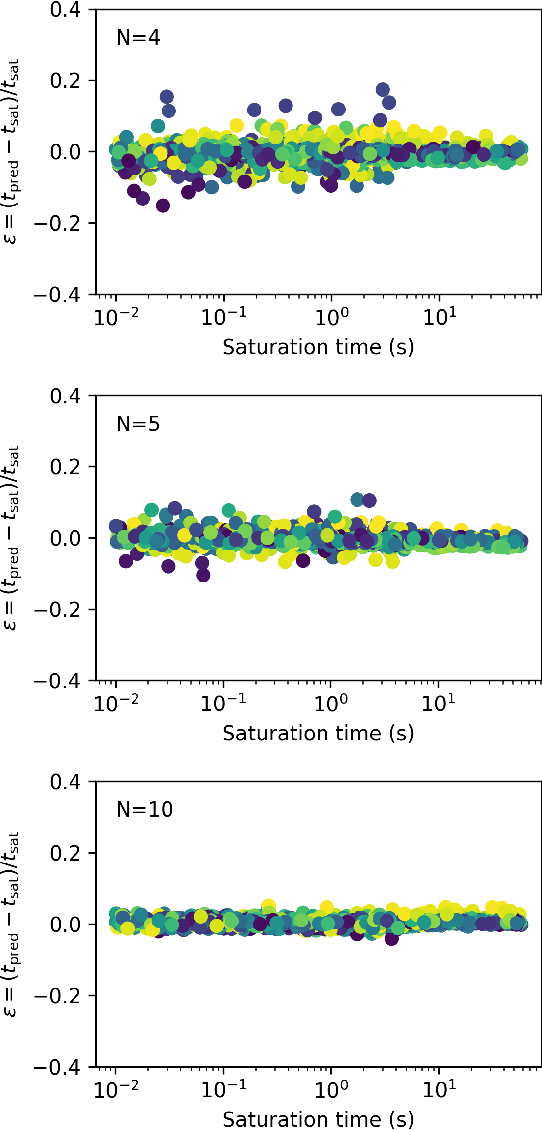
In this work we explore the application of deep neural networks to the optimization of atomic layer deposition processes based on thickness values obtained at different points of an ALD reactor. We introduce a dataset designed to train neural networks to predict saturation times based on the dose time and thickness values measured at different points of the reactor for a single experimental condition. We then explore different artificial neural network configurations, including depth (number of hidden layers) and size (number of neurons in each layers) to better understand the size and complexity that neural networks should have to achieve high predictive accuracy. The results obtained show that trained neural networks can accurately predict saturation times without requiring any prior information on the surface kinetics. This provides a viable approach to minimize the number of experiments required to optimize new ALD processes in a known reactor. However, the datasets and training procedure depend on the reactor geometry.
Best of Both Worlds: Multi-task Audio-Visual Automatic Speech Recognition and Active Speaker Detection
May 10, 2022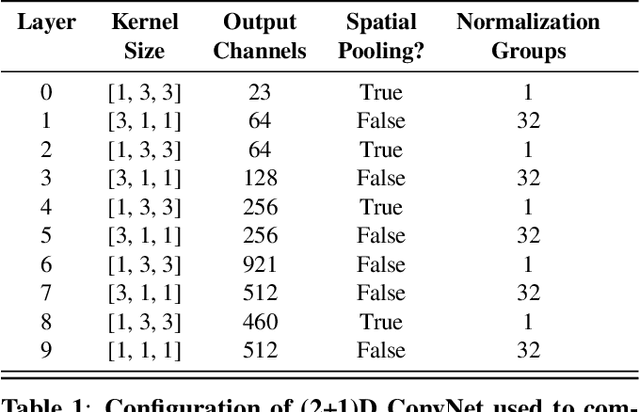
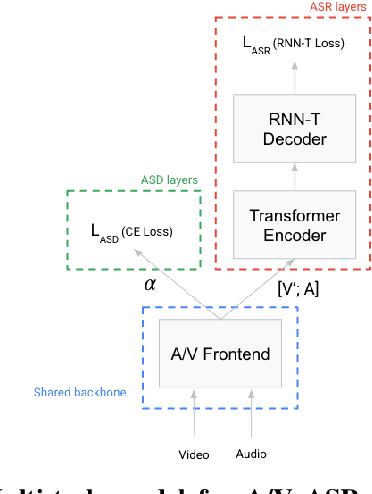
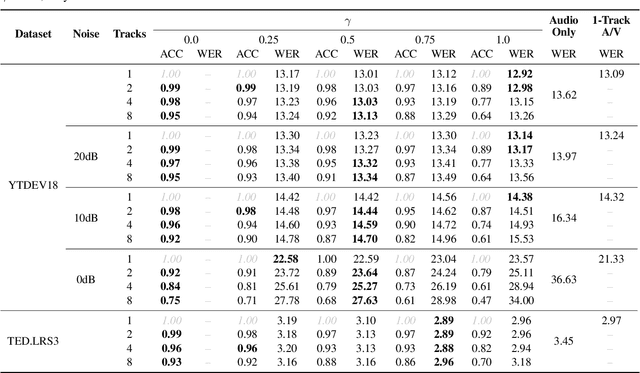
Under noisy conditions, automatic speech recognition (ASR) can greatly benefit from the addition of visual signals coming from a video of the speaker's face. However, when multiple candidate speakers are visible this traditionally requires solving a separate problem, namely active speaker detection (ASD), which entails selecting at each moment in time which of the visible faces corresponds to the audio. Recent work has shown that we can solve both problems simultaneously by employing an attention mechanism over the competing video tracks of the speakers' faces, at the cost of sacrificing some accuracy on active speaker detection. This work closes this gap in active speaker detection accuracy by presenting a single model that can be jointly trained with a multi-task loss. By combining the two tasks during training we reduce the ASD classification accuracy by approximately 25%, while simultaneously improving the ASR performance when compared to the multi-person baseline trained exclusively for ASR.
ISALT: Inference-based schemes adaptive to large time-stepping for locally Lipschitz ergodic systems
Feb 25, 2021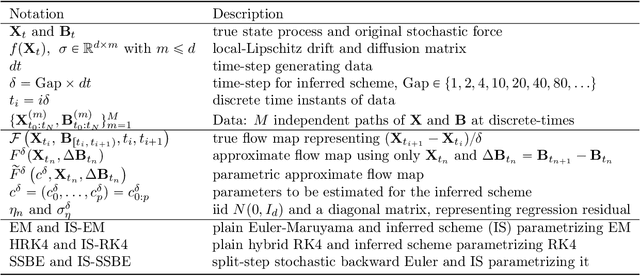
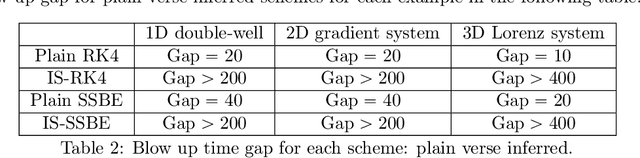
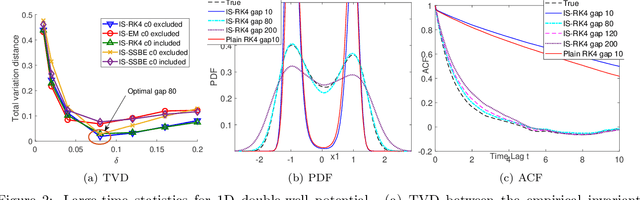
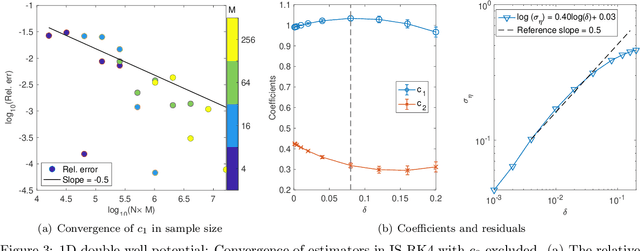
Efficient simulation of SDEs is essential in many applications, particularly for ergodic systems that demand efficient simulation of both short-time dynamics and large-time statistics. However, locally Lipschitz SDEs often require special treatments such as implicit schemes with small time-steps to accurately simulate the ergodic measure. We introduce a framework to construct inference-based schemes adaptive to large time-steps (ISALT) from data, achieving a reduction in time by several orders of magnitudes. The key is the statistical learning of an approximation to the infinite-dimensional discrete-time flow map. We explore the use of numerical schemes (such as the Euler-Maruyama, a hybrid RK4, and an implicit scheme) to derive informed basis functions, leading to a parameter inference problem. We introduce a scalable algorithm to estimate the parameters by least squares, and we prove the convergence of the estimators as data size increases. We test the ISALT on three non-globally Lipschitz SDEs: the 1D double-well potential, a 2D multi-scale gradient system, and the 3D stochastic Lorenz equation with degenerate noise. Numerical results show that ISALT can tolerate time-step magnitudes larger than plain numerical schemes. It reaches optimal accuracy in reproducing the invariant measure when the time-step is medium-large.
The Complexity of Markov Equilibrium in Stochastic Games
Apr 08, 2022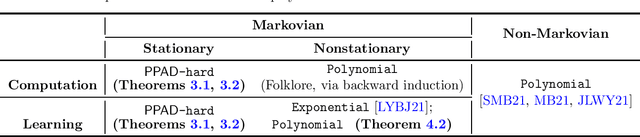
We show that computing approximate stationary Markov coarse correlated equilibria (CCE) in general-sum stochastic games is computationally intractable, even when there are two players, the game is turn-based, the discount factor is an absolute constant, and the approximation is an absolute constant. Our intractability results stand in sharp contrast to normal-form games where exact CCEs are efficiently computable. A fortiori, our results imply that there are no efficient algorithms for learning stationary Markov CCE policies in multi-agent reinforcement learning (MARL), even when the interaction is two-player and turn-based, and both the discount factor and the desired approximation of the learned policies is an absolute constant. In turn, these results stand in sharp contrast to single-agent reinforcement learning (RL) where near-optimal stationary Markov policies can be efficiently learned. Complementing our intractability results for stationary Markov CCEs, we provide a decentralized algorithm (assuming shared randomness among players) for learning a nonstationary Markov CCE policy with polynomial time and sample complexity in all problem parameters. Previous work for learning Markov CCE policies all required exponential time and sample complexity in the number of players.
An optimized hybrid solution for IoT based lifestyle disease classification using stress data
Apr 04, 2022



Stress, anxiety, and nervousness are all high-risk health states in everyday life. Previously, stress levels were determined by speaking with people and gaining insight into what they had experienced recently or in the past. Typically, stress is caused by an incidence that occurred a long time ago, but sometimes it is triggered by unknown factors. This is a challenging and complex task, but recent research advances have provided numerous opportunities to automate it. The fundamental features of most of these techniques are electro dermal activity (EDA) and heart rate values (HRV). We utilized an accelerometer to measure body motions to solve this challenge. The proposed novel method employs a test that measures a subject's electrocardiogram (ECG), galvanic skin values (GSV), HRV values, and body movements in order to provide a low-cost and time-saving solution for detecting stress lifestyle disease in modern times using cyber physical systems. This study provides a new hybrid model for lifestyle disease classification that decreases execution time while picking the best collection of characteristics and increases classification accuracy. The developed approach is capable of dealing with the class imbalance problem by using WESAD (wearable stress and affect dataset) dataset. The new model uses the Grid search (GS) method to select an optimized set of hyper parameters, and it uses a combination of the Correlation coefficient based Recursive feature elimination (CoC-RFE) method for optimal feature selection and gradient boosting as an estimator to classify the dataset, which achieves high accuracy and helps to provide smart, accurate, and high-quality healthcare systems. To demonstrate the validity and utility of the proposed methodology, its performance is compared to those of other well-established machine learning models.
Soft Robotic Mannequin: Design and Algorithm for Deformation Control
May 10, 2022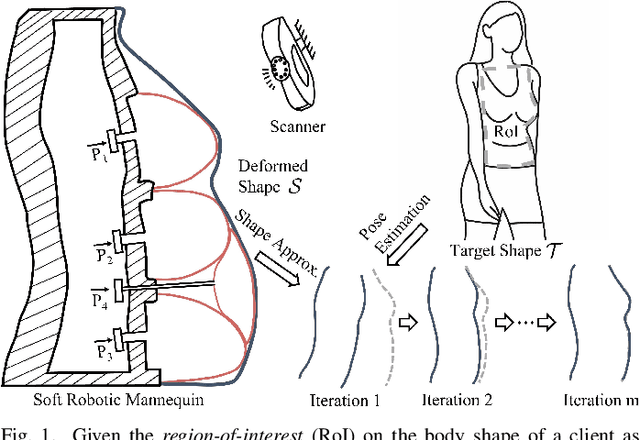
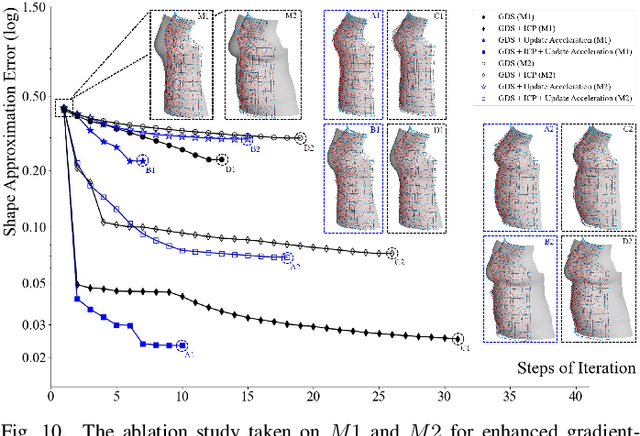
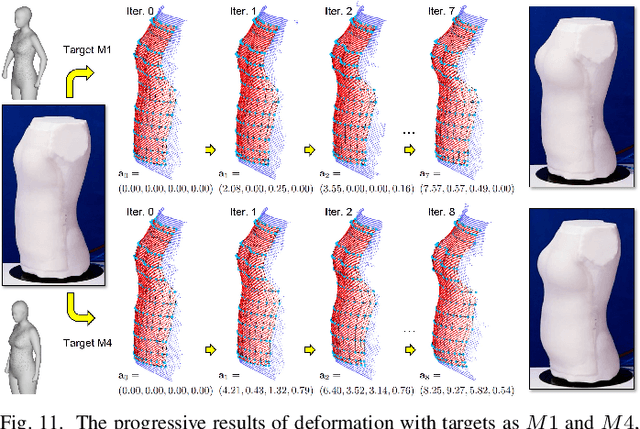
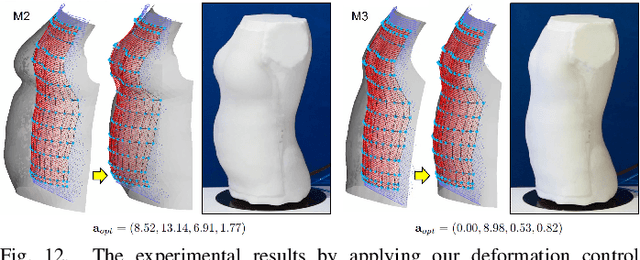
This paper presents a novel soft robotic system for a deformable mannequin that can be employed to physically realize the 3D geometry of different human bodies. The soft membrane on a mannequin is deformed by inflating several curved chambers using pneumatic actuation. Controlling the freeform surface of a soft membrane by adjusting the pneumatic actuation in different chambers is challenging as the membrane's shape is commonly determined by interaction between all chambers. Using vision feedback provided by a structured-light based 3D scanner, we developed an efficient algorithm to compute the optimized actuation of all chambers which could drive the soft membrane to deform into the best approximation of different target shapes. Our algorithm converges quickly by including the step of pose estimation in the loop of optimization, and the time-consuming step for evaluating derivatives on the deformable membrane is avoided by using the Broyden update when possible. The effectiveness of our soft robotic mannequin with controlled deformation has been verified in experiments.