 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Data-Driven Denoising of Accelerometer Signals
Jun 13, 2022
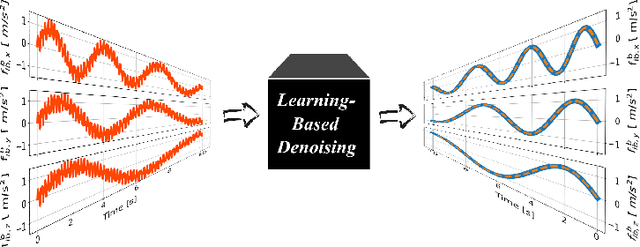
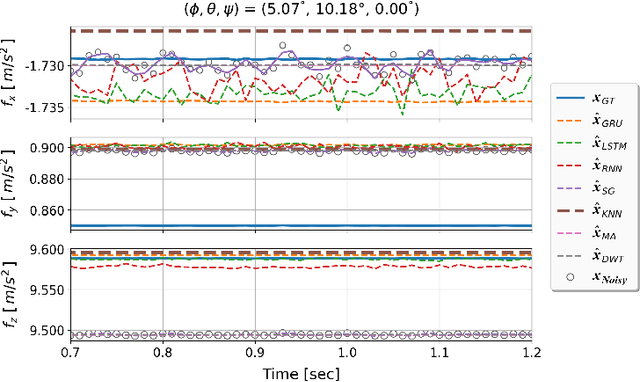
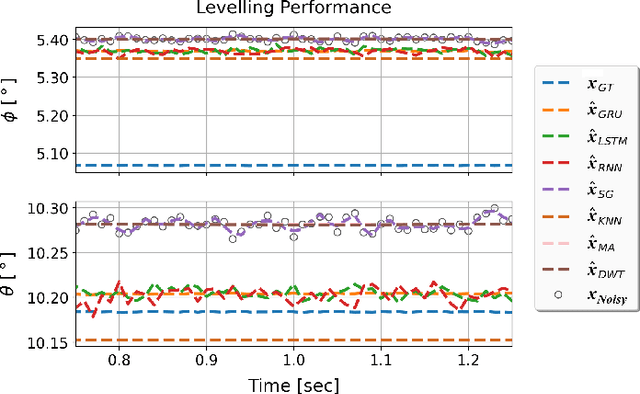
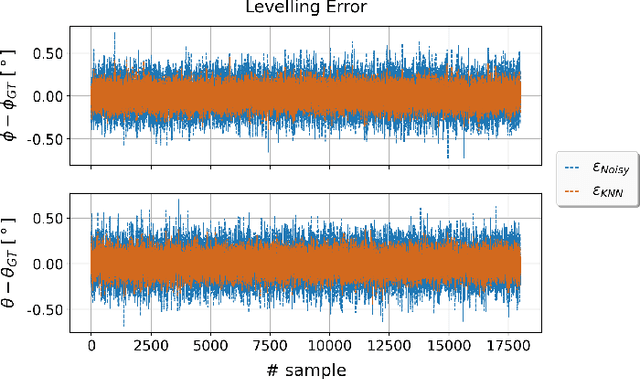
Modern navigation solutions are largely dependent on the performances of the standalone inertial sensors, especially at times when no external sources are available. During these outages, the inertial navigation solution is likely to degrade over time due to instrumental noises sources, particularly when using consumer low-cost inertial sensors. Conventionally, model-based estimation algorithms are employed to reduce noise levels and enhance meaningful information, thus improving the navigation solution directly. However, guaranteeing their optimality often proves to be challenging as sensors performance differ in manufacturing quality, process noise modeling, and calibration precision. In the literature, most inertial denoising models are model-based when recently several data-driven approaches were suggested primarily for gyroscope measurements denoising. Data-driven approaches for accelerometer denoising task are more challenging due to the unknown gravity projection on the accelerometer axes. To fill this gap, we propose several learning-based approaches and compare their performances with prominent denoising algorithms, in terms of pure noise removal, followed by stationary coarse alignment procedure. Based on the benchmarking results, obtained in field experiments, we show that: (i) learning-based models perform better than traditional signal processing filtering; (ii) non-parametric kNN algorithm outperforms all state of the art deep learning models examined in this study; (iii) denoising can be fruitful for pure inertial signal reconstruction, but moreover for navigation-related tasks, as both errors are shown to be reduced up to one order of magnitude.
POLA: Online Time Series Prediction by Adaptive Learning Rates
Feb 17, 2021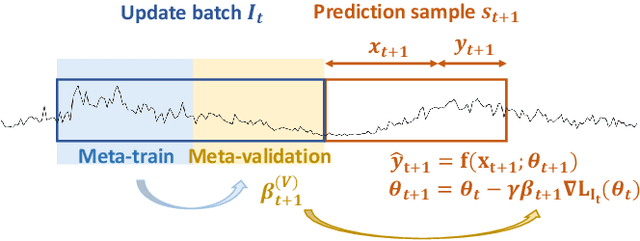
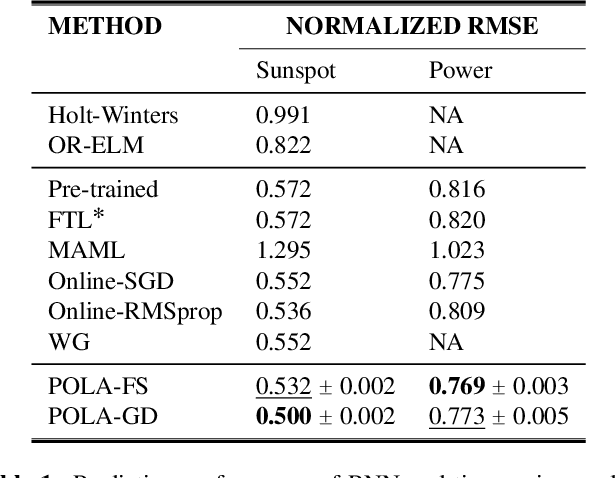
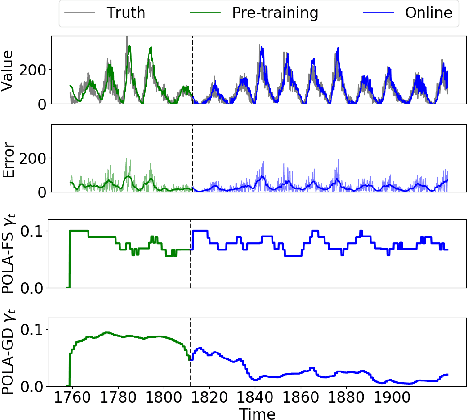
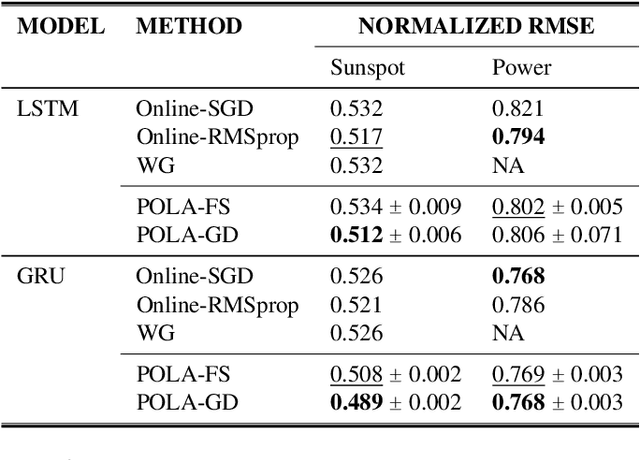
Online prediction for streaming time series data has practical use for many real-world applications where downstream decisions depend on accurate forecasts for the future. Deployment in dynamic environments requires models to adapt quickly to changing data distributions without overfitting. We propose POLA (Predicting Online by Learning rate Adaptation) to automatically regulate the learning rate of recurrent neural network models to adapt to changing time series patterns across time. POLA meta-learns the learning rate of the stochastic gradient descent (SGD) algorithm by assimilating the prequential or interleaved-test-then-train evaluation scheme for online prediction. We evaluate POLA on two real-world datasets across three commonly-used recurrent neural network models. POLA demonstrates overall comparable or better predictive performance over other online prediction methods.
Learning sRGB-to-Raw-RGB De-rendering with Content-Aware Metadata
Jun 03, 2022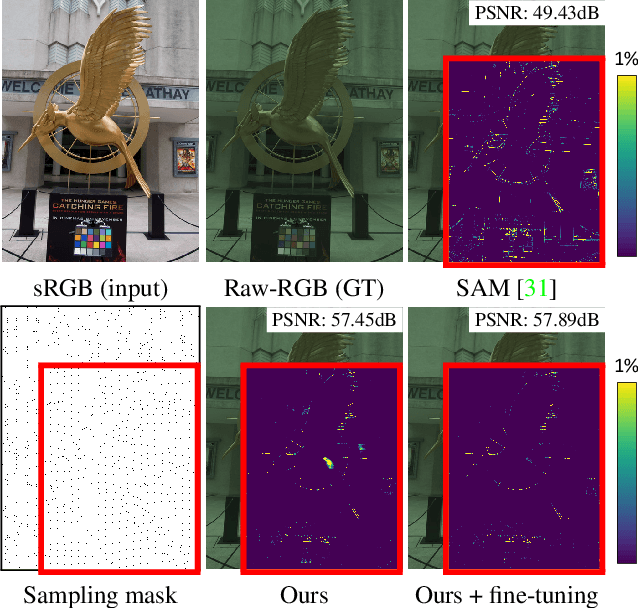

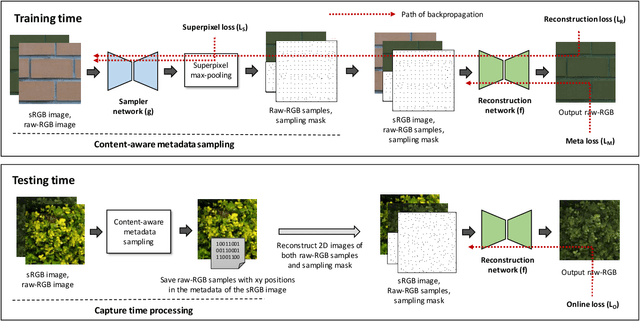
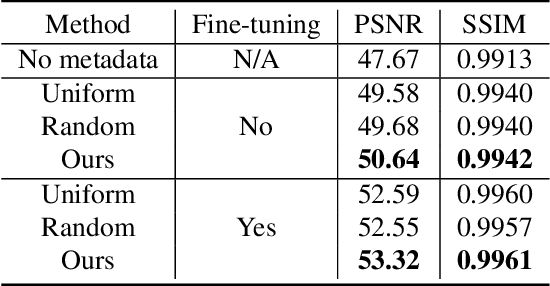
Most camera images are rendered and saved in the standard RGB (sRGB) format by the camera's hardware. Due to the in-camera photo-finishing routines, nonlinear sRGB images are undesirable for computer vision tasks that assume a direct relationship between pixel values and scene radiance. For such applications, linear raw-RGB sensor images are preferred. Saving images in their raw-RGB format is still uncommon due to the large storage requirement and lack of support by many imaging applications. Several "raw reconstruction" methods have been proposed that utilize specialized metadata sampled from the raw-RGB image at capture time and embedded in the sRGB image. This metadata is used to parameterize a mapping function to de-render the sRGB image back to its original raw-RGB format when needed. Existing raw reconstruction methods rely on simple sampling strategies and global mapping to perform the de-rendering. This paper shows how to improve the de-rendering results by jointly learning sampling and reconstruction. Our experiments show that our learned sampling can adapt to the image content to produce better raw reconstructions than existing methods. We also describe an online fine-tuning strategy for the reconstruction network to improve results further.
Configuration-Aware Safe Control for Mobile Robotic Arm with Control Barrier Functions
Apr 18, 2022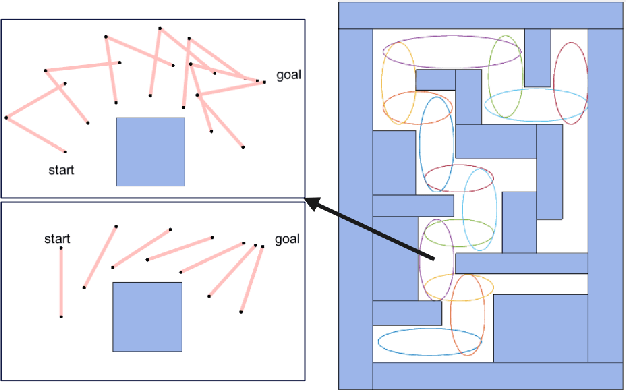
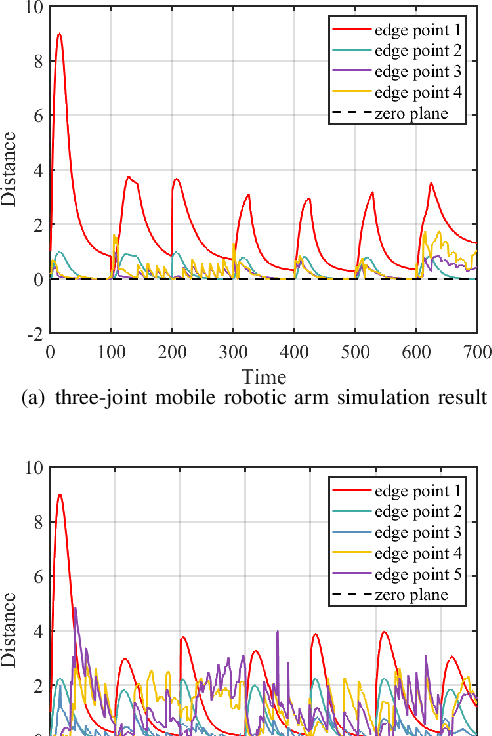
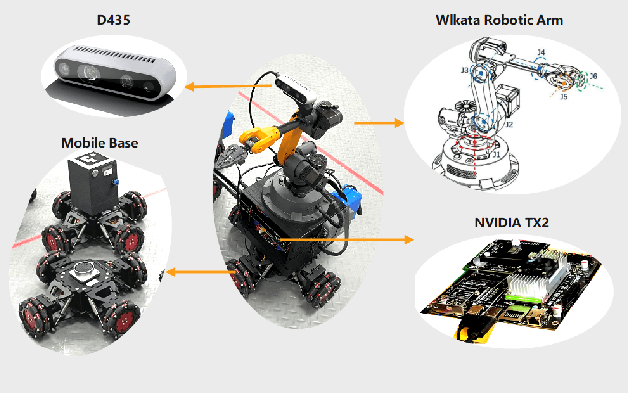
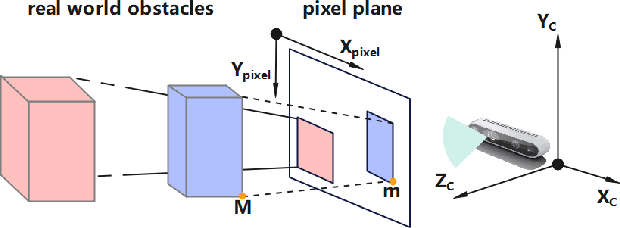
Collision avoidance is a widely investigated topic in robotic applications. When applying collision avoidance techniques to a mobile robot, how to deal with the spatial structure of the robot still remains a challenge. In this paper, we design a configuration-aware safe control law by solving a Quadratic Programming (QP) with designed Control Barrier Functions (CBFs) constraints, which can safely navigate a mobile robotic arm to a desired region while avoiding collision with environmental obstacles. The advantage of our approach is that it correctly and in an elegant way incorporates the spatial structure of the mobile robotic arm. This is achieved by merging geometric restrictions among mobile robotic arm links into CBFs constraints. Simulations on a rigid rod and the modeled mobile robotic arm are performed to verify the feasibility and time-efficiency of proposed method. Numerical results about the time consuming for different degrees of freedom illustrate that our method scales well with dimension.
Deep Learning Neural Networks for Emotion Classification from Text: Enhanced Leaky Rectified Linear Unit Activation and Weighted Loss
Mar 04, 2022
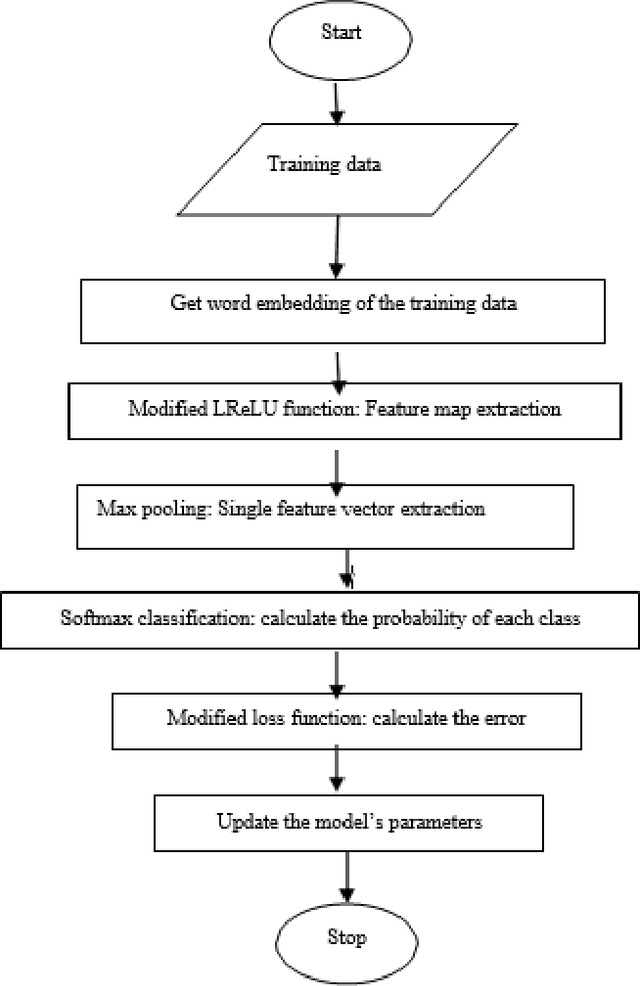
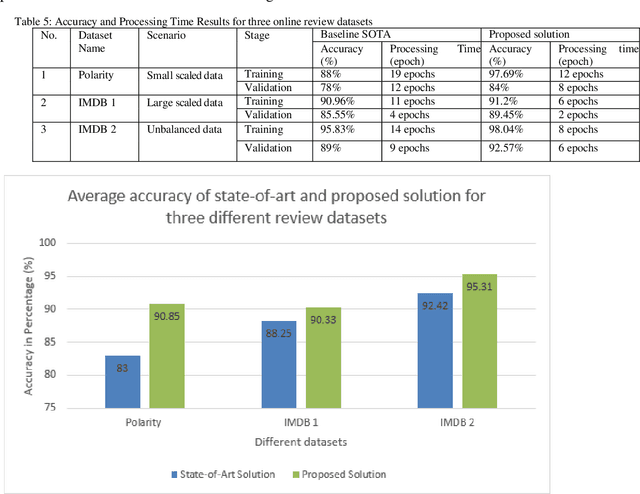
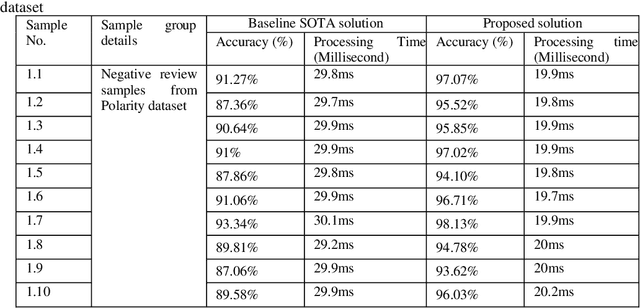
Accurate emotion classification for online reviews is vital for business organizations to gain deeper insights into markets. Although deep learning has been successfully implemented in this area, accuracy and processing time are still major problems preventing it from reaching its full potential. This paper proposes an Enhanced Leaky Rectified Linear Unit activation and Weighted Loss (ELReLUWL) algorithm for enhanced text emotion classification and faster parameter convergence speed. This algorithm includes the definition of the inflection point and the slope for inputs on the left side of the inflection point to avoid gradient saturation. It also considers the weight of samples belonging to each class to compensate for the influence of data imbalance. Convolutional Neural Network (CNN) combined with the proposed algorithm to increase the classification accuracy and decrease the processing time by eliminating the gradient saturation problem and minimizing the negative effect of data imbalance, demonstrated on a binary sentiment problem. The results show that the proposed solution achieves better classification performance in different data scenarios and different review types. The proposed model takes less convergence time to achieve model optimization with seven epochs against the current convergence time of 11.5 epochs on average. The proposed solution improves accuracy and reduces the processing time of text emotion classification. The solution provides an average class accuracy of 96.63% against a current average accuracy of 91.56%. It also provides a processing time of 23.3 milliseconds compared to the current average processing time of 33.2 milliseconds. Finally, this study solves the issues of gradient saturation and data imbalance. It enhances overall average class accuracy and decreases processing time.
* 28 pages
Inferring Black Hole Properties from Astronomical Multivariate Time Series with Bayesian Attentive Neural Processes
Jun 02, 2021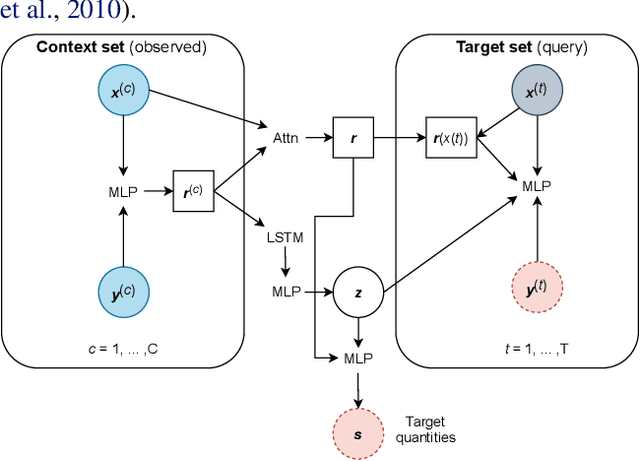
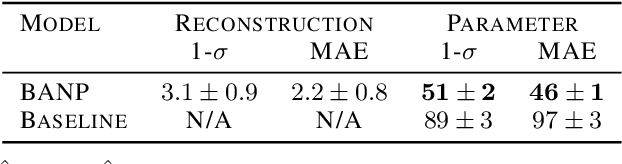
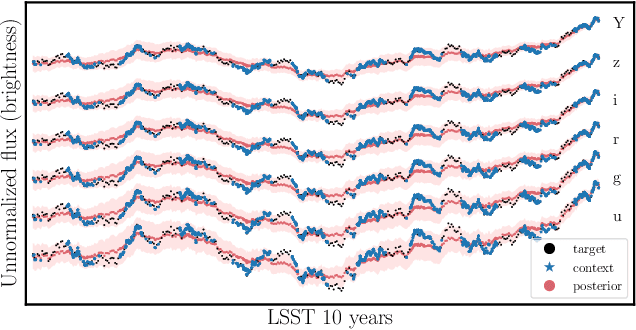
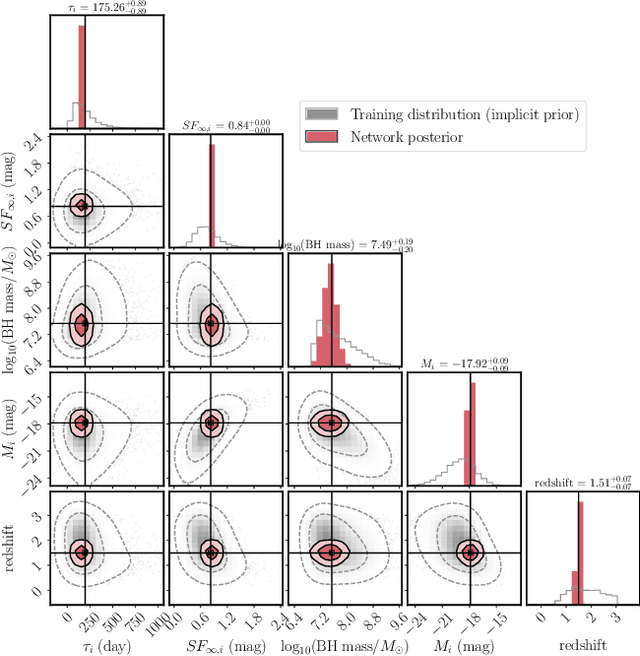
Among the most extreme objects in the Universe, active galactic nuclei (AGN) are luminous centers of galaxies where a black hole feeds on surrounding matter. The variability patterns of the light emitted by an AGN contain information about the physical properties of the underlying black hole. Upcoming telescopes will observe over 100 million AGN in multiple broadband wavelengths, yielding a large sample of multivariate time series with long gaps and irregular sampling. We present a method that reconstructs the AGN time series and simultaneously infers the posterior probability density distribution (PDF) over the physical quantities of the black hole, including its mass and luminosity. We apply this method to a simulated dataset of 11,000 AGN and report precision and accuracy of 0.4 dex and 0.3 dex in the inferred black hole mass. This work is the first to address probabilistic time series reconstruction and parameter inference for AGN in an end-to-end fashion.
Forecast-based Multi-aspect Framework for Multivariate Time-series Anomaly Detection
Jan 13, 2022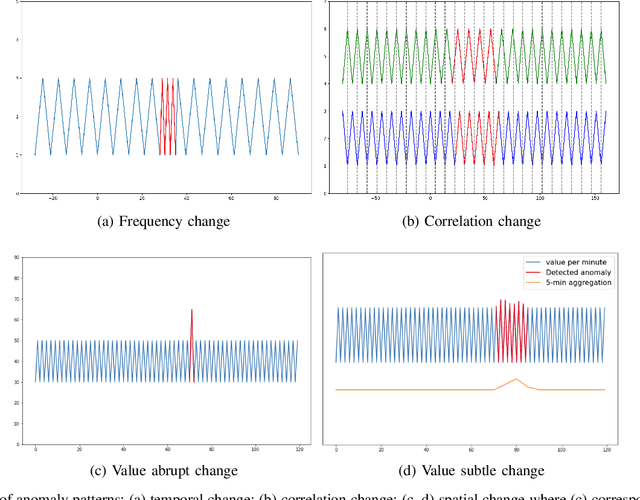
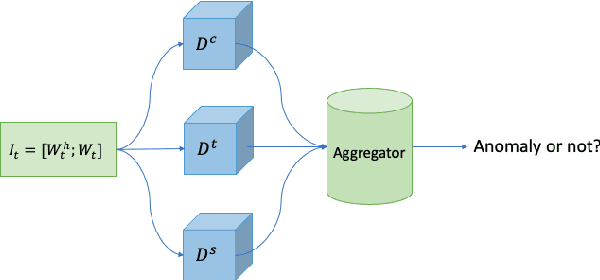
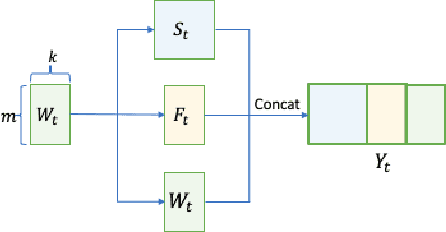
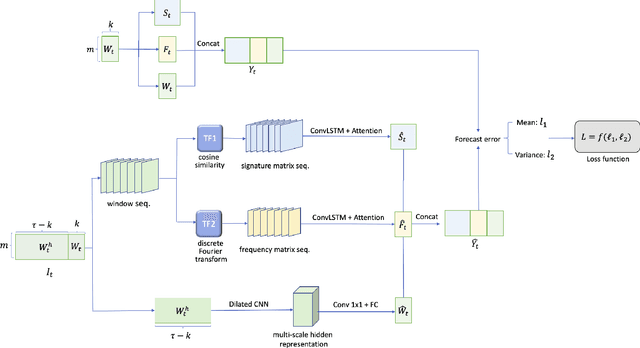
Today's cyber-world is vastly multivariate. Metrics collected at extreme varieties demand multivariate algorithms to properly detect anomalies. However, forecast-based algorithms, as widely proven approaches, often perform sub-optimally or inconsistently across datasets. A key common issue is they strive to be one-size-fits-all but anomalies are distinctive in nature. We propose a method that tailors to such distinction. Presenting FMUAD - a Forecast-based, Multi-aspect, Unsupervised Anomaly Detection framework. FMUAD explicitly and separately captures the signature traits of anomaly types - spatial change, temporal change and correlation change - with independent modules. The modules then jointly learn an optimal feature representation, which is highly flexible and intuitive, unlike most other models in the category. Extensive experiments show our FMUAD framework consistently outperforms other state-of-the-art forecast-based anomaly detectors.
Safety Guarantees for Neural Network Dynamic Systems via Stochastic Barrier Functions
Jun 15, 2022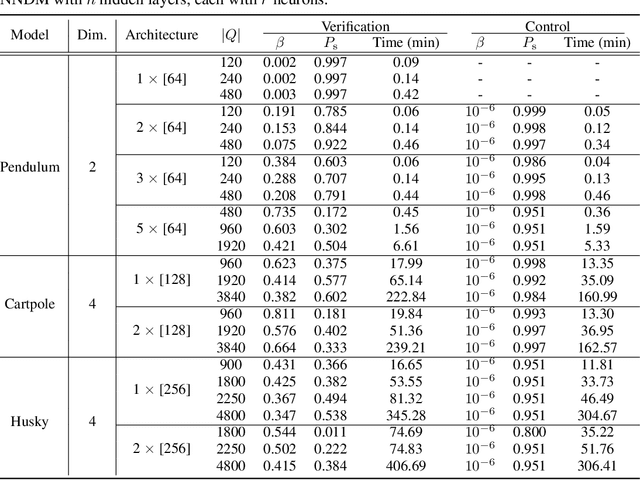
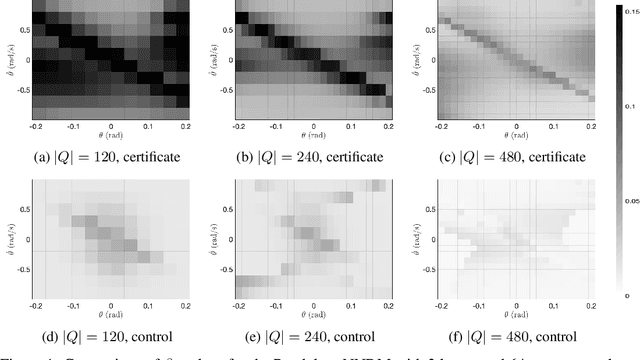
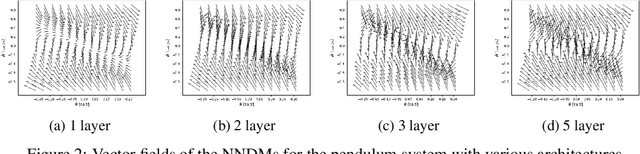
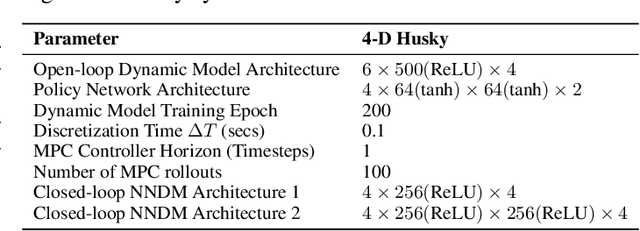
Neural Networks (NNs) have been successfully employed to represent the state evolution of complex dynamical systems. Such models, referred to as NN dynamic models (NNDMs), use iterative noisy predictions of NN to estimate a distribution of system trajectories over time. Despite their accuracy, safety analysis of NNDMs is known to be a challenging problem and remains largely unexplored. To address this issue, in this paper, we introduce a method of providing safety guarantees for NNDMs. Our approach is based on stochastic barrier functions, whose relation with safety are analogous to that of Lyapunov functions with stability. We first show a method of synthesizing stochastic barrier functions for NNDMs via a convex optimization problem, which in turn provides a lower bound on the system's safety probability. A key step in our method is the employment of the recent convex approximation results for NNs to find piece-wise linear bounds, which allow the formulation of the barrier function synthesis problem as a sum-of-squares optimization program. If the obtained safety probability is above the desired threshold, the system is certified. Otherwise, we introduce a method of generating controls for the system that robustly maximizes the safety probability in a minimally-invasive manner. We exploit the convexity property of the barrier function to formulate the optimal control synthesis problem as a linear program. Experimental results illustrate the efficacy of the method. Namely, they show that the method can scale to multi-dimensional NNDMs with multiple layers and hundreds of neurons per layer, and that the controller can significantly improve the safety probability.
Robust Experimentation in the Continuous Time Bandit Problem
Mar 31, 2021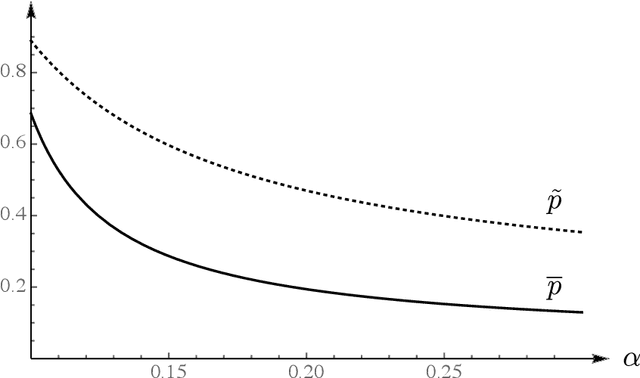
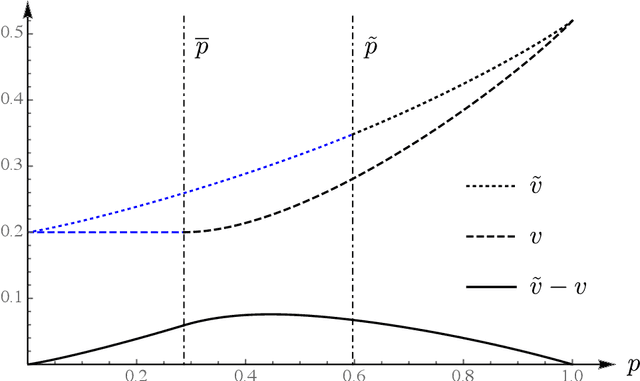
We study the experimentation dynamics of a decision maker (DM) in a two-armed bandit setup (Bolton and Harris (1999)), where the agent holds ambiguous beliefs regarding the distribution of the return process of one arm and is certain about the other one. The DM entertains Multiplier preferences a la Hansen and Sargent (2001), thus we frame the decision making environment as a two-player differential game against nature in continuous time. We characterize the DM value function and her optimal experimentation strategy that turns out to follow a cut-off rule with respect to her belief process. The belief threshold for exploring the ambiguous arm is found in closed form and is shown to be increasing with respect to the ambiguity aversion index. We then study the effect of provision of an unambiguous information source about the ambiguous arm. Interestingly, we show that the exploration threshold rises unambiguously as a result of this new information source, thereby leading to more conservatism. This analysis also sheds light on the efficient time to reach for an expert opinion.
BLINK with Elasticsearch for Efficient Entity Linking in Business Conversations
May 09, 2022
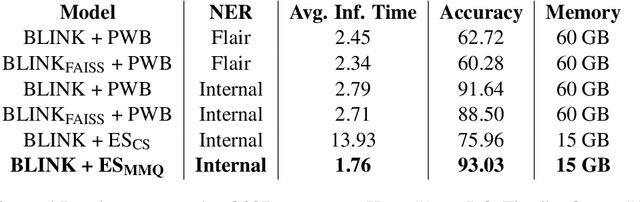
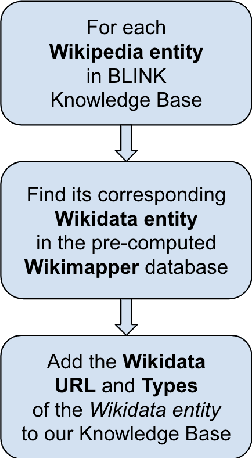
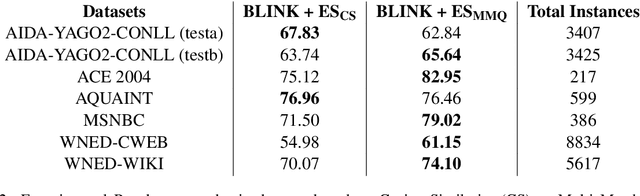
An Entity Linking system aligns the textual mentions of entities in a text to their corresponding entries in a knowledge base. However, deploying a neural entity linking system for efficient real-time inference in production environments is a challenging task. In this work, we present a neural entity linking system that connects the product and organization type entities in business conversations to their corresponding Wikipedia and Wikidata entries. The proposed system leverages Elasticsearch to ensure inference efficiency when deployed in a resource limited cloud machine, and obtains significant improvements in terms of inference speed and memory consumption while retaining high accuracy.