 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
AudioScopeV2: Audio-Visual Attention Architectures for Calibrated Open-Domain On-Screen Sound Separation
Jul 20, 2022
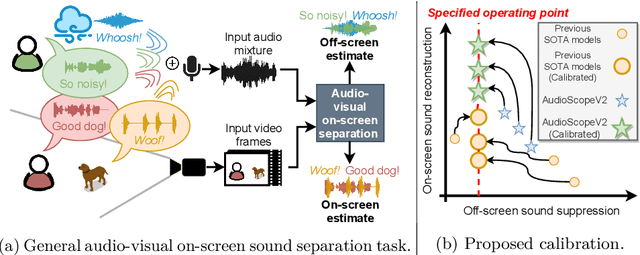
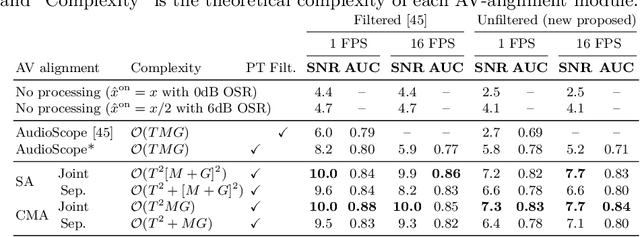
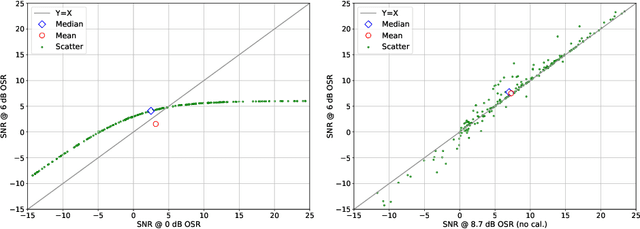
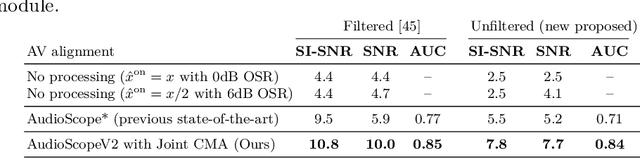
We introduce AudioScopeV2, a state-of-the-art universal audio-visual on-screen sound separation system which is capable of learning to separate sounds and associate them with on-screen objects by looking at in-the-wild videos. We identify several limitations of previous work on audio-visual on-screen sound separation, including the coarse resolution of spatio-temporal attention, poor convergence of the audio separation model, limited variety in training and evaluation data, and failure to account for the trade off between preservation of on-screen sounds and suppression of off-screen sounds. We provide solutions to all of these issues. Our proposed cross-modal and self-attention network architectures capture audio-visual dependencies at a finer resolution over time, and we also propose efficient separable variants that are capable of scaling to longer videos without sacrificing much performance. We also find that pre-training the separation model only on audio greatly improves results. For training and evaluation, we collected new human annotations of onscreen sounds from a large database of in-the-wild videos (YFCC100M). This new dataset is more diverse and challenging. Finally, we propose a calibration procedure that allows exact tuning of on-screen reconstruction versus off-screen suppression, which greatly simplifies comparing performance between models with different operating points. Overall, our experimental results show marked improvements in on-screen separation performance under much more general conditions than previous methods with minimal additional computational complexity.
A Unified Approach to Reinforcement Learning, Quantal Response Equilibria, and Two-Player Zero-Sum Games
Jun 12, 2022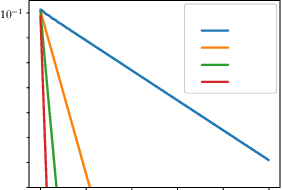
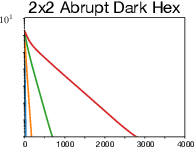
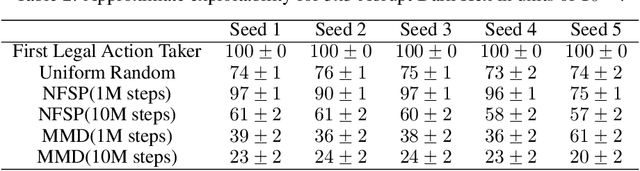

Algorithms designed for single-agent reinforcement learning (RL) generally fail to converge to equilibria in two-player zero-sum (2p0s) games. Conversely, game-theoretic algorithms for approximating Nash and quantal response equilibria (QREs) in 2p0s games are not typically competitive for RL and can be difficult to scale. As a result, algorithms for these two cases are generally developed and evaluated separately. In this work, we show that a single algorithm -- a simple extension to mirror descent with proximal regularization that we call magnetic mirror descent (MMD) -- can produce strong results in both settings, despite their fundamental differences. From a theoretical standpoint, we prove that MMD converges linearly to QREs in extensive-form games -- this is the first time linear convergence has been proven for a first order solver. Moreover, applied as a tabular Nash equilibrium solver via self-play, we show empirically that MMD produces results competitive with CFR in both normal-form and extensive-form games with full feedback (this is the first time that a standard RL algorithm has done so) and also that MMD empirically converges in black-box feedback settings. Furthermore, for single-agent deep RL, on a small collection of Atari and Mujoco games, we show that MMD can produce results competitive with those of PPO. Lastly, for multi-agent deep RL, we show MMD can outperform NFSP in 3x3 Abrupt Dark Hex.
End-to-End License Plate Recognition Pipeline for Real-time Low Resource Video Based Applications
Aug 18, 2021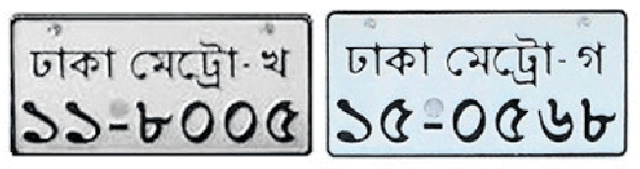

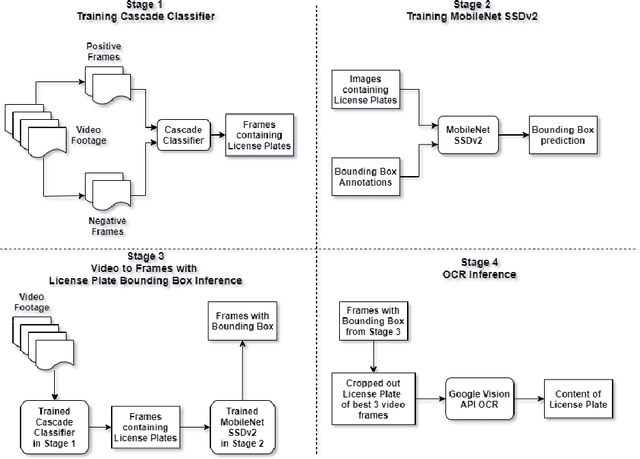
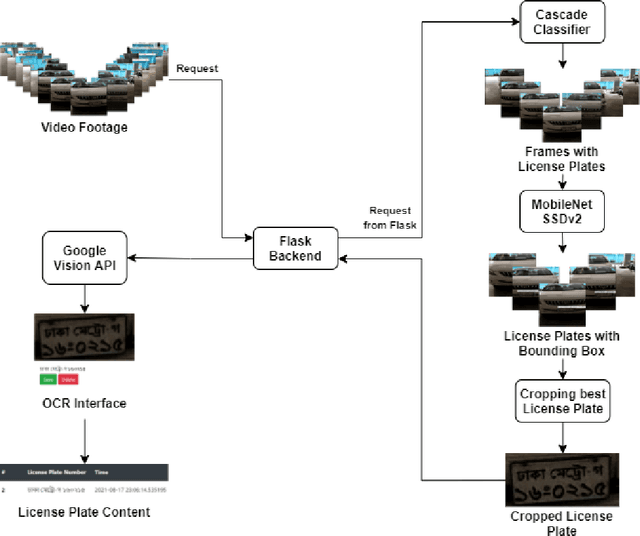
Automatic License Plate Recognition systems aim to provide an end-to-end solution towards detecting, localizing, and recognizing license plate characters from vehicles appearing in video frames. However, deploying such systems in the real world requires real-time performance in low-resource environments. In our paper, we propose a novel two-stage detection pipeline paired with Vision API that aims to provide real-time inference speed along with consistently accurate detection and recognition performance. We used a haar-cascade classifier as a filter on top of our backbone MobileNet SSDv2 detection model. This reduces inference time by only focusing on high confidence detections and using them for recognition. We also impose a temporal frame separation strategy to identify multiple vehicle license plates in the same clip. Furthermore, there are no publicly available Bangla license plate datasets, for which we created an image dataset and a video dataset containing license plates in the wild. We trained our models on the image dataset and achieved an AP(0.5) score of 86% and tested our pipeline on the video dataset and observed reasonable detection and recognition performance (82.7% detection rate, and 60.8% OCR F1 score) with real-time processing speed (27.2 frames per second).
Entangled Residual Mappings
Jun 02, 2022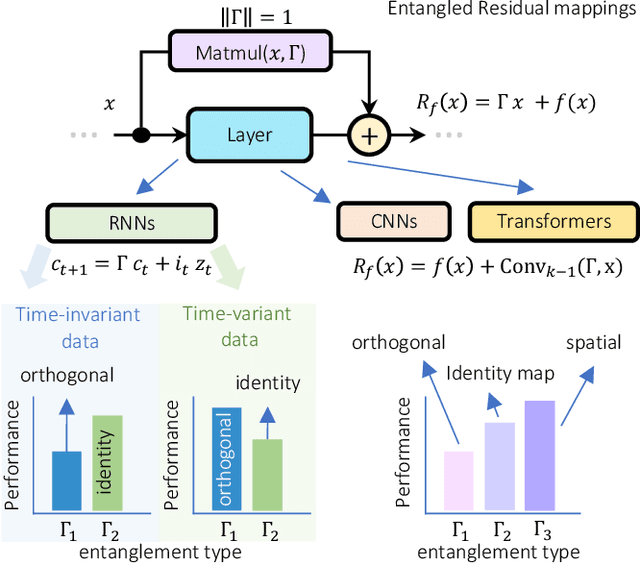
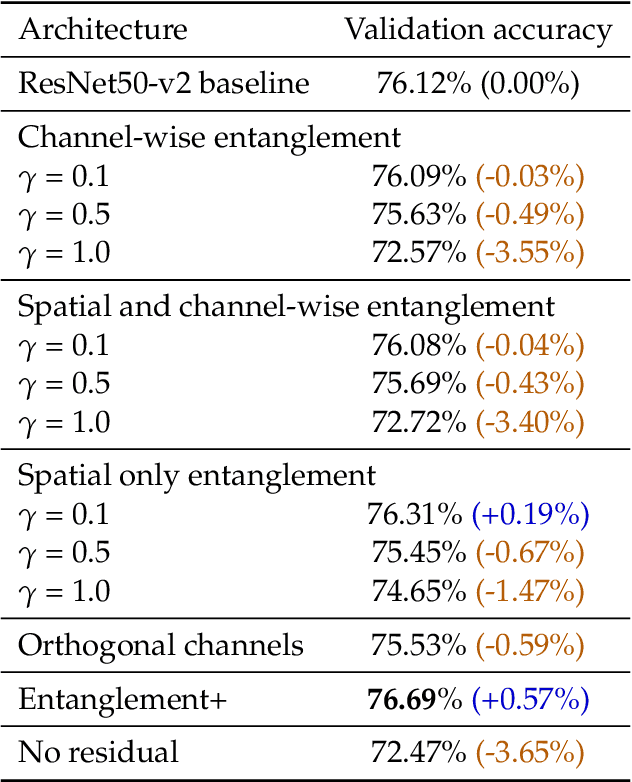
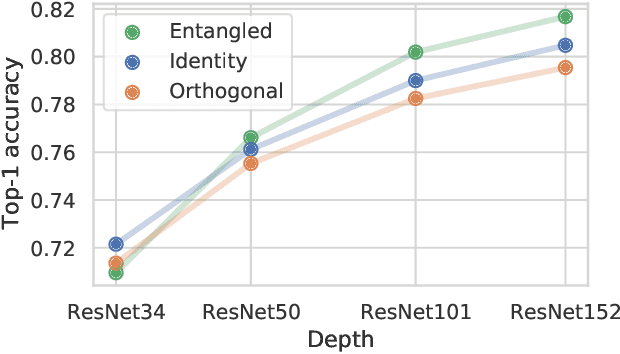
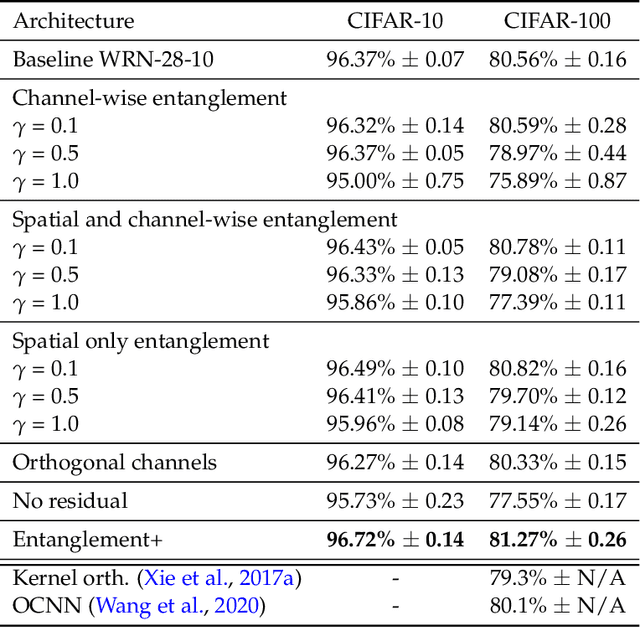
Residual mappings have been shown to perform representation learning in the first layers and iterative feature refinement in higher layers. This interplay, combined with their stabilizing effect on the gradient norms, enables them to train very deep networks. In this paper, we take a step further and introduce entangled residual mappings to generalize the structure of the residual connections and evaluate their role in iterative learning representations. An entangled residual mapping replaces the identity skip connections with specialized entangled mappings such as orthogonal, sparse, and structural correlation matrices that share key attributes (eigenvalues, structure, and Jacobian norm) with identity mappings. We show that while entangled mappings can preserve the iterative refinement of features across various deep models, they influence the representation learning process in convolutional networks differently than attention-based models and recurrent neural networks. In general, we find that for CNNs and Vision Transformers entangled sparse mapping can help generalization while orthogonal mappings hurt performance. For recurrent networks, orthogonal residual mappings form an inductive bias for time-variant sequences, which degrades accuracy on time-invariant tasks.
Actor-Critic Scheduling for Path-Aware Air-to-Ground Multipath Multimedia Delivery
Apr 28, 2022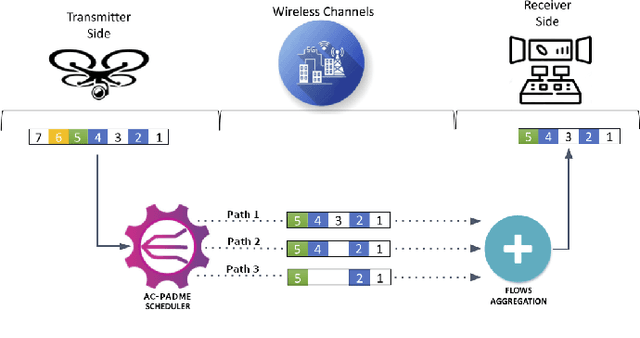
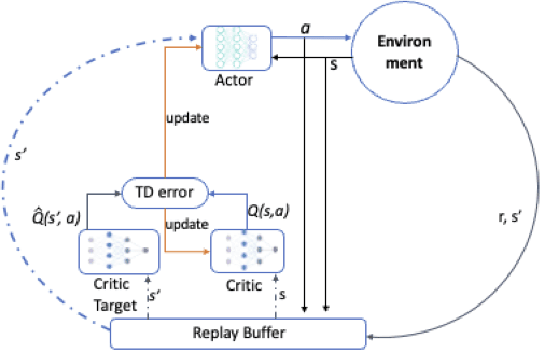
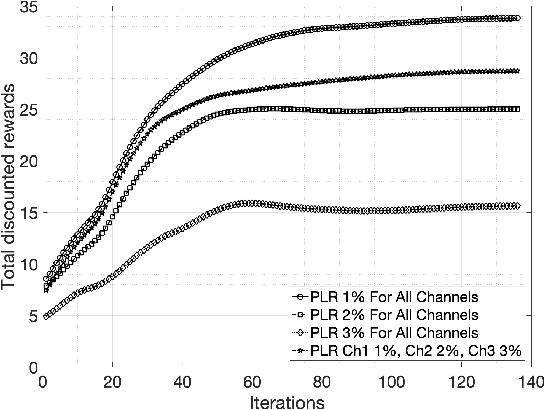
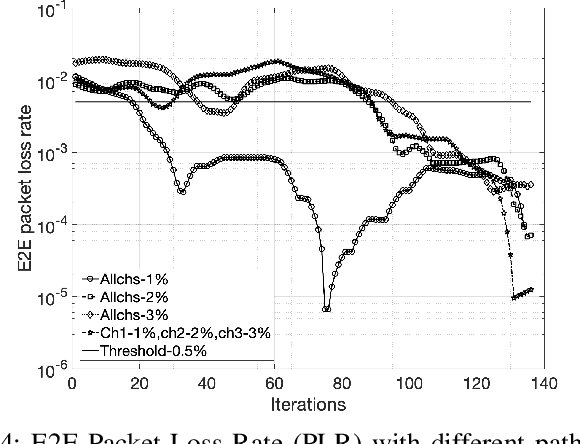
Reinforcement Learning (RL) has recently found wide applications in network traffic management and control because some of its variants do not require prior knowledge of network models. In this paper, we present a novel scheduler for real-time multimedia delivery in multipath systems based on an Actor-Critic (AC) RL algorithm. We focus on a challenging scenario of real-time video streaming from an Unmanned Aerial Vehicle (UAV) using multiple wireless paths. The scheduler acting as an RL agent learns in real-time the optimal policy for path selection, path rate allocation and redundancy estimation for flow protection. The scheduler, implemented as a module of the GStreamer framework, can be used in real or simulated settings. The simulation results show that our scheduler can target a very low loss rate at the receiver by dynamically adapting in real-time the scheduling policy to the path conditions without performing training or relying on prior knowledge of network channel models.
Improving Task-free Continual Learning by Distributionally Robust Memory Evolution
Jul 15, 2022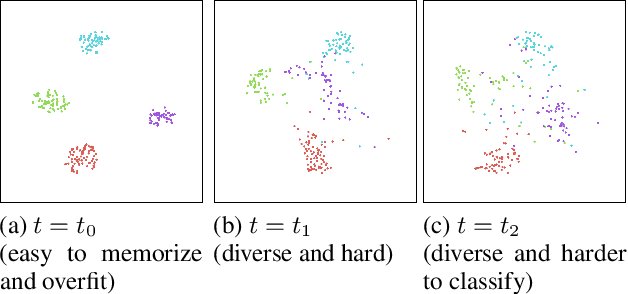
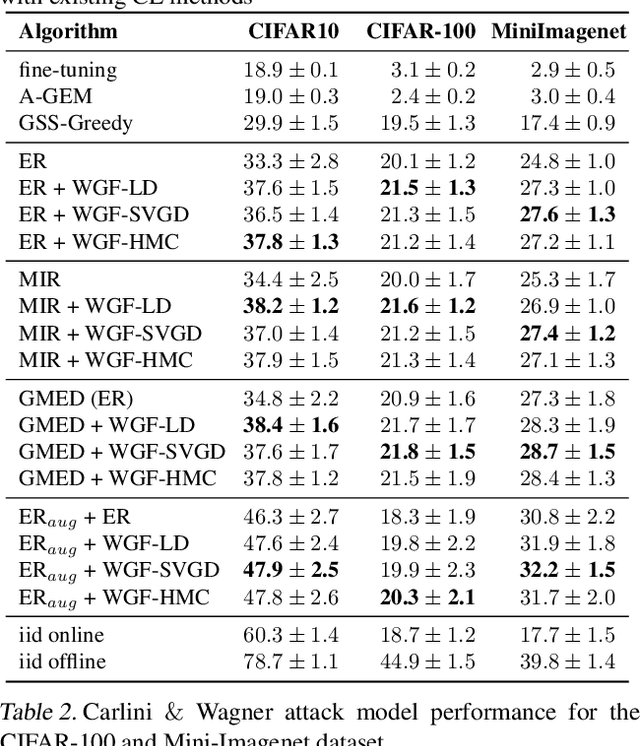
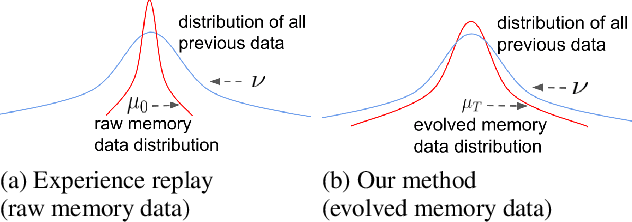
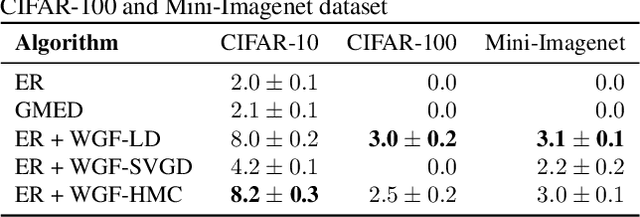
Task-free continual learning (CL) aims to learn a non-stationary data stream without explicit task definitions and not forget previous knowledge. The widely adopted memory replay approach could gradually become less effective for long data streams, as the model may memorize the stored examples and overfit the memory buffer. Second, existing methods overlook the high uncertainty in the memory data distribution since there is a big gap between the memory data distribution and the distribution of all the previous data examples. To address these problems, for the first time, we propose a principled memory evolution framework to dynamically evolve the memory data distribution by making the memory buffer gradually harder to be memorized with distributionally robust optimization (DRO). We then derive a family of methods to evolve the memory buffer data in the continuous probability measure space with Wasserstein gradient flow (WGF). The proposed DRO is w.r.t the worst-case evolved memory data distribution, thus guarantees the model performance and learns significantly more robust features than existing memory-replay-based methods. Extensive experiments on existing benchmarks demonstrate the effectiveness of the proposed methods for alleviating forgetting. As a by-product of the proposed framework, our method is more robust to adversarial examples than existing task-free CL methods.
Bringing Image Scene Structure to Video via Frame-Clip Consistency of Object Tokens
Jun 15, 2022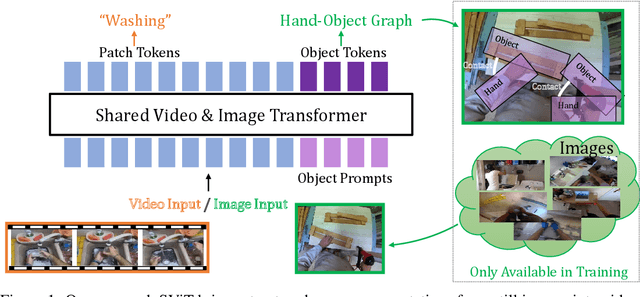
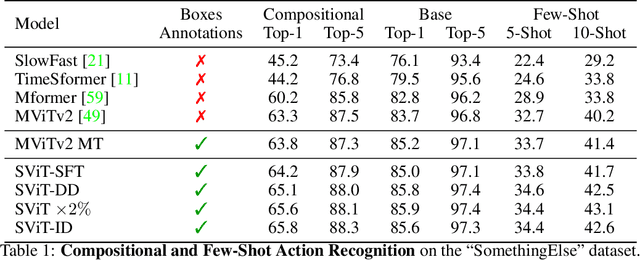
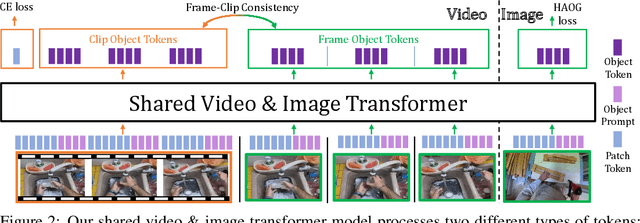
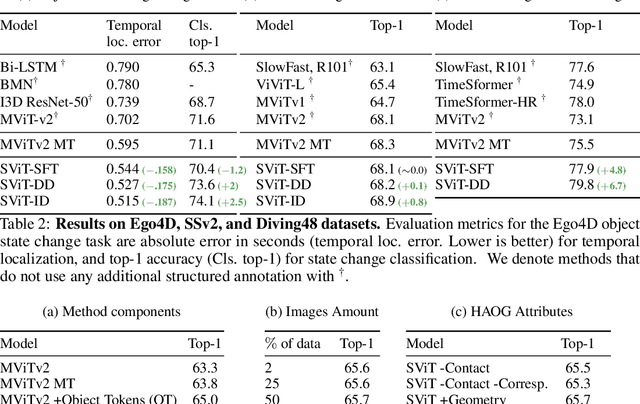
Recent action recognition models have achieved impressive results by integrating objects, their locations and interactions. However, obtaining dense structured annotations for each frame is tedious and time-consuming, making these methods expensive to train and less scalable. At the same time, if a small set of annotated images is available, either within or outside the domain of interest, how could we leverage these for a video downstream task? We propose a learning framework StructureViT (SViT for short), which demonstrates how utilizing the structure of a small number of images only available during training can improve a video model. SViT relies on two key insights. First, as both images and videos contain structured information, we enrich a transformer model with a set of \emph{object tokens} that can be used across images and videos. Second, the scene representations of individual frames in video should "align" with those of still images. This is achieved via a \emph{Frame-Clip Consistency} loss, which ensures the flow of structured information between images and videos. We explore a particular instantiation of scene structure, namely a \emph{Hand-Object Graph}, consisting of hands and objects with their locations as nodes, and physical relations of contact/no-contact as edges. SViT shows strong performance improvements on multiple video understanding tasks and datasets. Furthermore, it won in the Ego4D CVPR'22 Object State Localization challenge. For code and pretrained models, visit the project page at \url{https://eladb3.github.io/SViT/}
Robot Vitals and Robot Health: Towards Systematically Quantifying Runtime Performance Degradation in Robots Under Adverse Conditions
Jul 04, 2022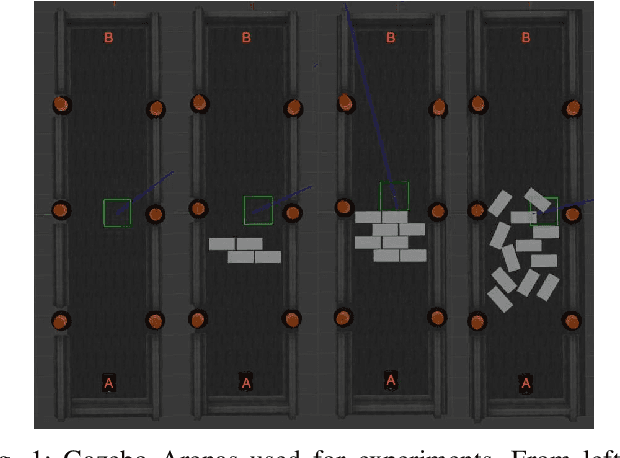
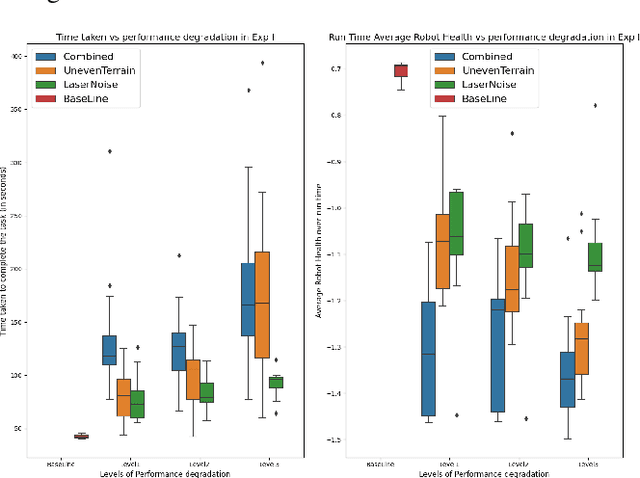
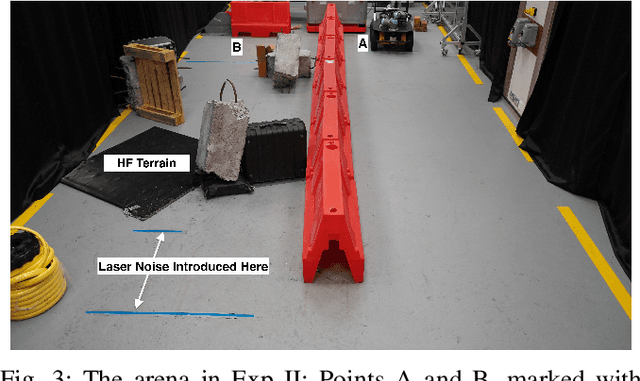
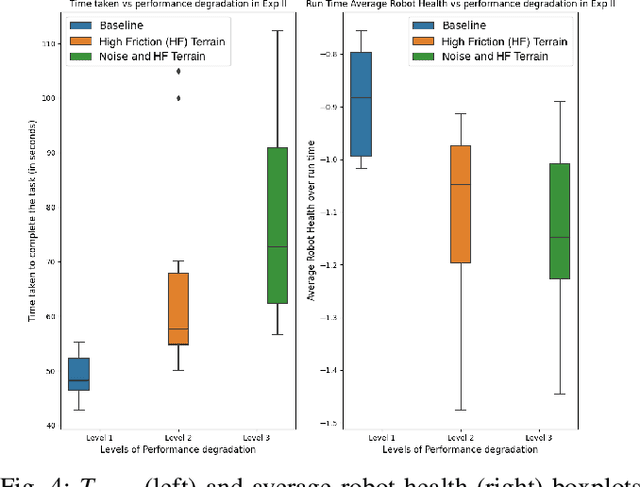
This paper addresses the problem of automatically detecting and quantifying performance degradation in remote mobile robots during task execution. A robot may encounter a variety of uncertainties and adversities during task execution, which can impair its ability to carry out tasks effectively and cause its performance to degrade. Such situations can be mitigated or averted by timely detection and intervention (e.g., by a remote human supervisor taking over control in teleoperation mode). Inspired by patient triaging systems in hospitals, we introduce the framework of "robot vitals" for estimating overall "robot health". A robot's vitals are a set of indicators that estimate the extent of performance degradation faced by a robot at a given point in time. Robot health is a metric that combines robot vitals into a single scalar value estimate of performance degradation. Experiments, both in simulation and on a real mobile robot, demonstrate that the proposed robot vitals and robot health can be used effectively to estimate robot performance degradation during runtime.
Efficient Search of the k Shortest Non-Homotopic Paths by Eliminating Non-k-Optimal Topologies
Jul 27, 2022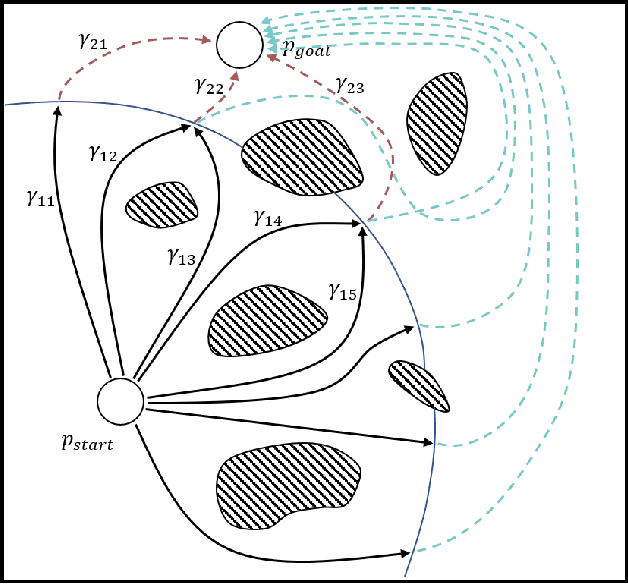
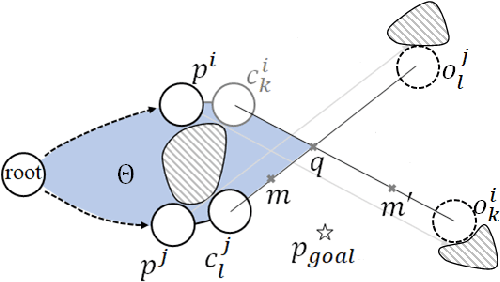
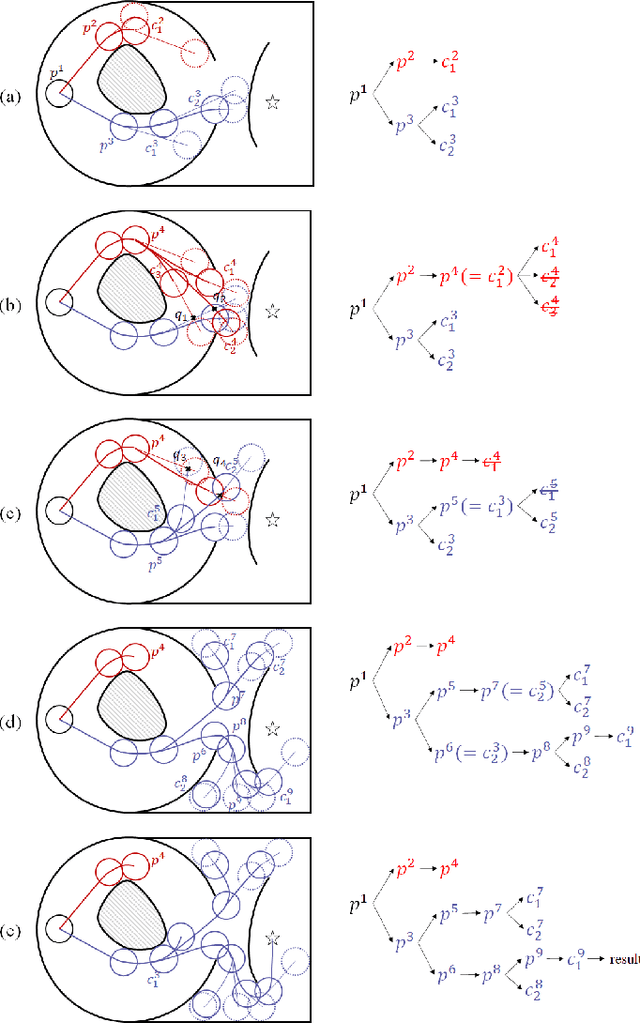
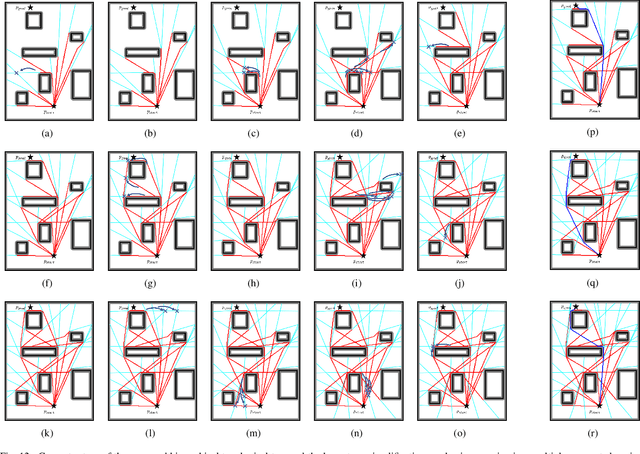
An efficient algorithm to solve the $k$ shortest non-homotopic path planning ($k$-SNPP) problem in a 2D environment is proposed in this paper. Motivated by accelerating the inefficient exploration of the homotopy-augmented space of the 2D environment, our fundamental idea is to identify the non-$k$-optimal path topologies as early as possible and terminate the pathfinding along them. This is a non-trivial practice because it has to be done at an intermediate state of the path planning process when locally shortest paths have not been fully constructed. In other words, the paths to be compared have not rendezvoused at the goal location, which makes the homotopy theory, modelling the spatial relationship among the paths having the same endpoint, not applicable. This paper is the first work that develops a systematic distance-based topology simplification mechanism to solve the $k$-SNPP task, whose core contribution is to assert the distance-based order of non-homotopic locally shortest paths before constructing them. If the order can be predicted, then those path topologies having more than $k$ better topologies are proven free of the desired $k$ paths and thus can be safely discarded during the path planning process. To this end, a hierarchical topological tree is proposed as an implementation of the mechanism, whose nodes are proven to expand in non-homotopic directions and edges (collision-free path segments) are proven locally shortest. With efficient criteria that observe the order relations between partly constructed locally shortest paths being imparted into the tree, the tree nodes that expand in non-$k$-optimal topologies will not be expanded. As a result, the computational time for solving the $k$-SNPP problem is reduced by near two orders of magnitude.
Practical Black Box Hamiltonian Learning
Jun 30, 2022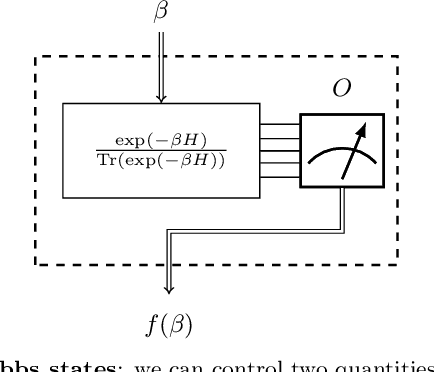

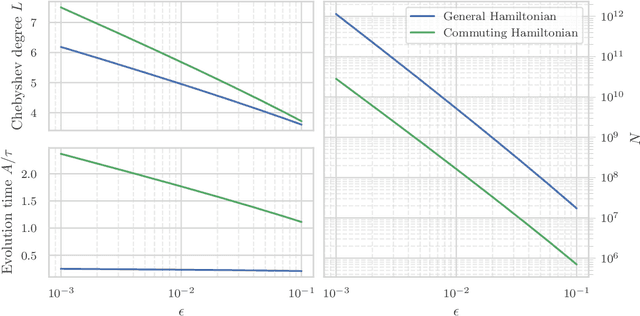
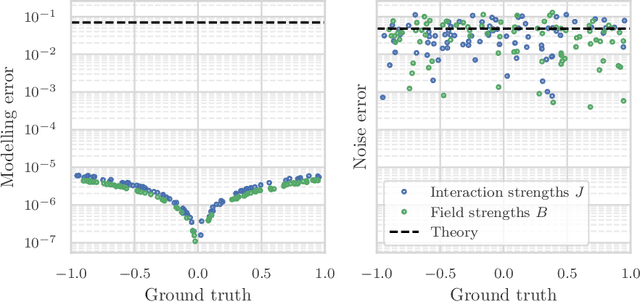
We study the problem of learning the parameters for the Hamiltonian of a quantum many-body system, given limited access to the system. In this work, we build upon recent approaches to Hamiltonian learning via derivative estimation. We propose a protocol that improves the scaling dependence of prior works, particularly with respect to parameters relating to the structure of the Hamiltonian (e.g., its locality $k$). Furthermore, by deriving exact bounds on the performance of our protocol, we are able to provide a precise numerical prescription for theoretically optimal settings of hyperparameters in our learning protocol, such as the maximum evolution time (when learning with unitary dynamics) or minimum temperature (when learning with Gibbs states). Thanks to these improvements, our protocol is practical for large problems: we demonstrate this with a numerical simulation of our protocol on an 80-qubit system.