 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Toward An Optimal Selection of Dialogue Strategies: A Target-Driven Approach for Intelligent Outbound Robots
Jun 22, 2022
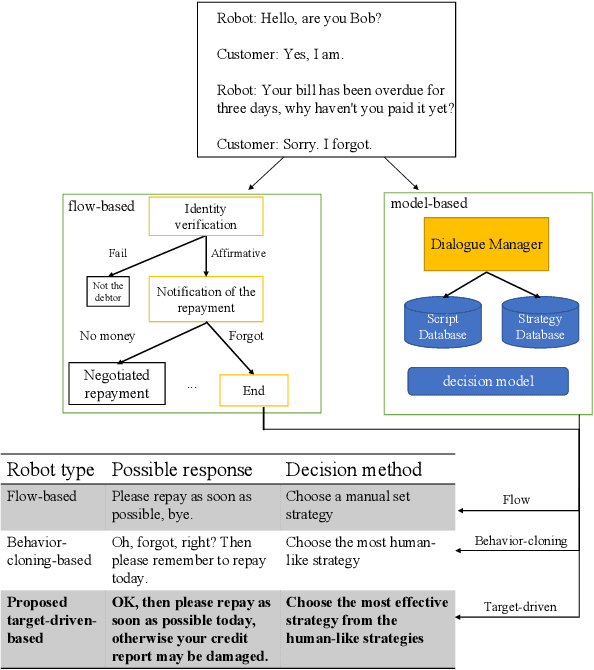
With the growth of the economy and society, enterprises, especially in the FinTech industry, have increasing demands of outbound calls for customers such as debt collection, marketing, anti-fraud calls, and so on. But a large amount of repetitive and mechanical work occupies most of the time of human agents, so the cost of equipment and labor for enterprises is increasing accordingly. At the same time, with the development of artificial intelligence technology in the past few decades, it has become quite common for companies to use new technologies such as Big Data and artificial intelligence to empower outbound call businesses. The intelligent outbound robot is a typical application of the artificial intelligence technology in the field of outbound call businesses. It is mainly used to communicate with customers in order to accomplish a certain target. It has the characteristics of low cost, high reuse, and easy compliance, which has attracted more attention from the industry. At present, there are two kinds of intelligent outbound robots in the industry but both of them still leave large room for improvement. One kind of them is based on a finite state machine relying on the configuration of jump conditions and corresponding nodes based on manual experience. This kind of intelligent outbound robot is also called a flow-based robot. For example, the schematic diagram of the working model of a flow-based robot for debt collection is shown in Fig.\ref{fig:label}. In each round, the robot will reply to the user with the words corresponding to each node.
NExG: Provable and Guided State Space Exploration of Neural Network Control Systems using Sensitivity Approximation
Jul 08, 2022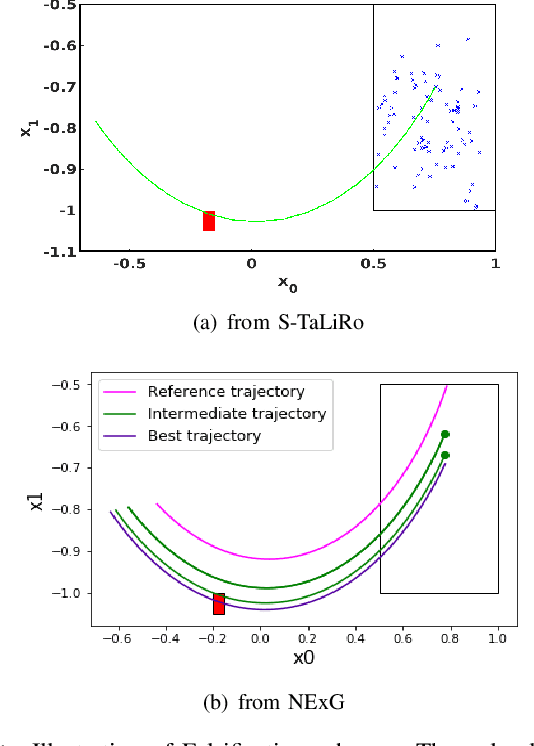
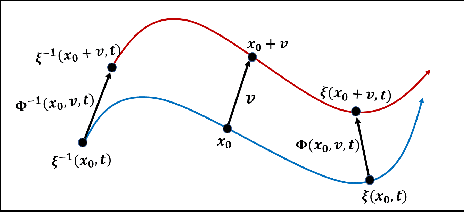
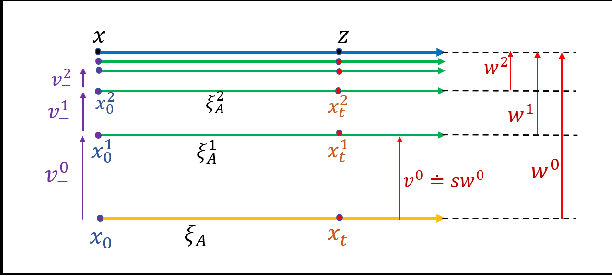
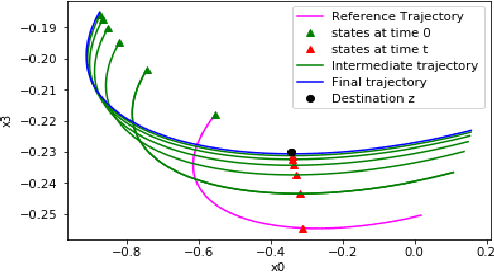
We propose a new technique for performing state space exploration of closed loop control systems with neural network feedback controllers. Our approach involves approximating the sensitivity of the trajectories of the closed loop dynamics. Using such an approximator and the system simulator, we present a guided state space exploration method that can generate trajectories visiting the neighborhood of a target state at a specified time. We present a theoretical framework which establishes that our method will produce a sequence of trajectories that will reach a suitable neighborhood of the target state. We provide thorough evaluation of our approach on various systems with neural network feedback controllers of different configurations. We outperform earlier state space exploration techniques and achieve significant improvement in both the quality (explainability) and performance (convergence rate). Finally, we adopt our algorithm for the falsification of a class of temporal logic specification, assess its performance against a state-of-the-art falsification tool, and show its potential in supplementing existing falsification algorithms.
Lane-Level Route Planning for Autonomous Vehicles
Jun 06, 2022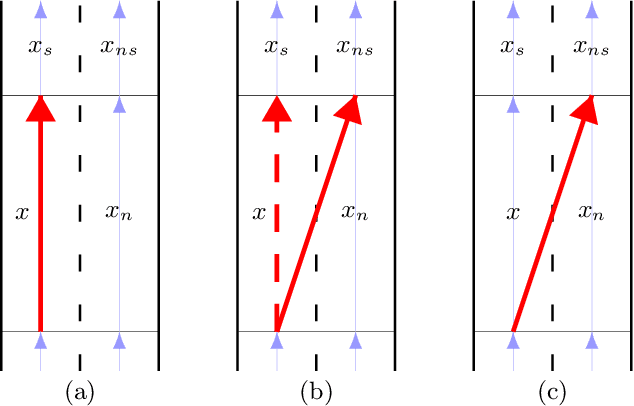
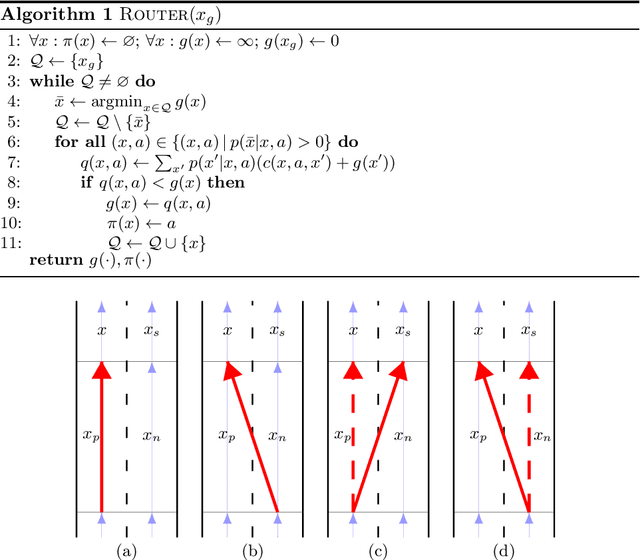
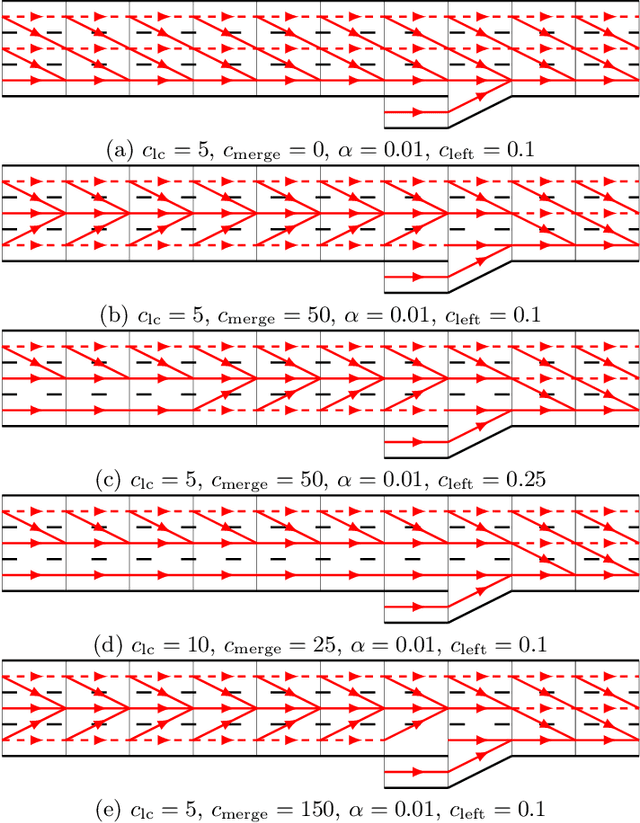
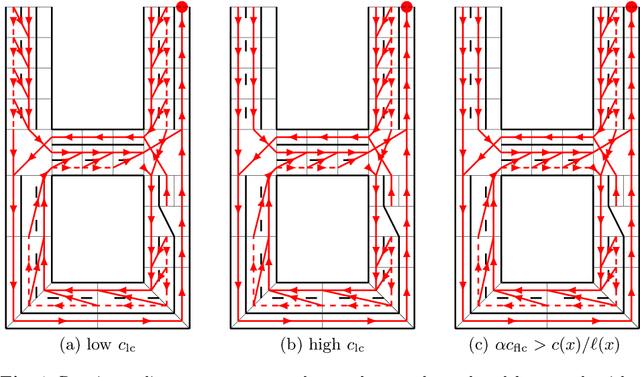
We present an algorithm that, given a representation of a road network in lane-level detail, computes a route that minimizes the expected cost to reach a given destination. In doing so, our algorithm allows us to solve for the complex trade-offs encountered when trying to decide not just which roads to follow, but also when to change between the lanes making up these roads, in order to -- for example -- reduce the likelihood of missing a left exit while not unnecessarily driving in the leftmost lane. This routing problem can naturally be formulated as a Markov Decision Process (MDP), in which lane change actions have stochastic outcomes. However, MDPs are known to be time-consuming to solve in general. In this paper, we show that -- under reasonable assumptions -- we can use a Dijkstra-like approach to solve this stochastic problem, and benefit from its efficient $O(n \log n)$ running time. This enables an autonomous vehicle to exhibit natural lane-selection behavior as it efficiently plans an optimal route to its destination.
Knowledge Transfer and Distillation from Autoregressive to Non-Autoregressive Speech Recognition
Jul 15, 2022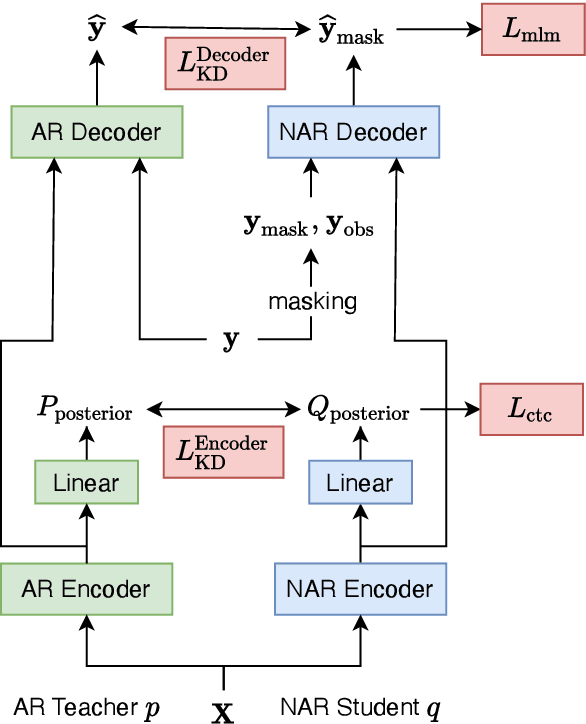
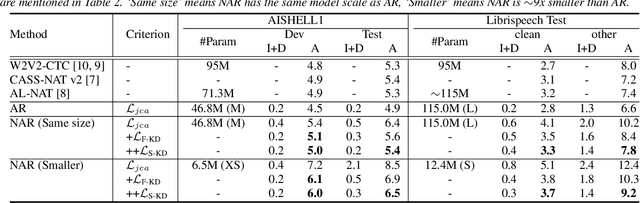
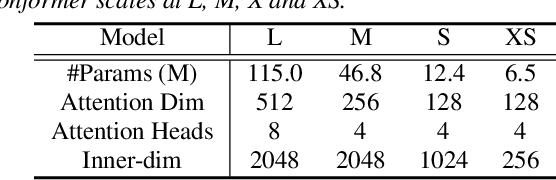
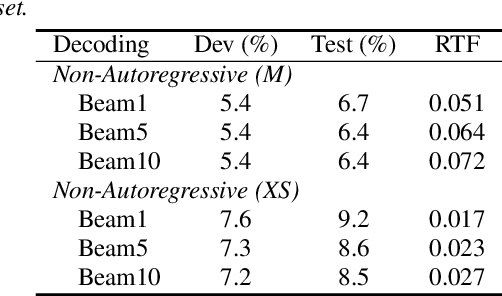
Modern non-autoregressive~(NAR) speech recognition systems aim to accelerate the inference speed; however, they suffer from performance degradation compared with autoregressive~(AR) models as well as the huge model size issue. We propose a novel knowledge transfer and distillation architecture that leverages knowledge from AR models to improve the NAR performance while reducing the model's size. Frame- and sequence-level objectives are well-designed for transfer learning. To further boost the performance of NAR, a beam search method on Mask-CTC is developed to enlarge the search space during the inference stage. Experiments show that the proposed NAR beam search relatively reduces CER by over 5% on AISHELL-1 benchmark with a tolerable real-time-factor~(RTF) increment. By knowledge transfer, the NAR student who has the same size as the AR teacher obtains relative CER reductions of 8/16% on AISHELL-1 dev/test sets, and over 25% relative WER reductions on LibriSpeech test-clean/other sets. Moreover, the ~9x smaller NAR models achieve ~25% relative CER/WER reductions on both AISHELL-1 and LibriSpeech benchmarks with the proposed knowledge transfer and distillation.
Open-source software for electrical engineering applications requiring consideration of electrodynamics: elecode
Jul 15, 2022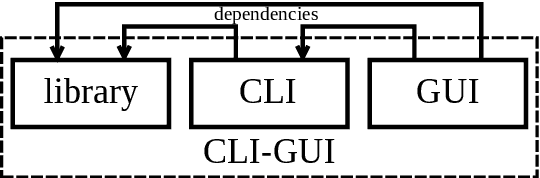
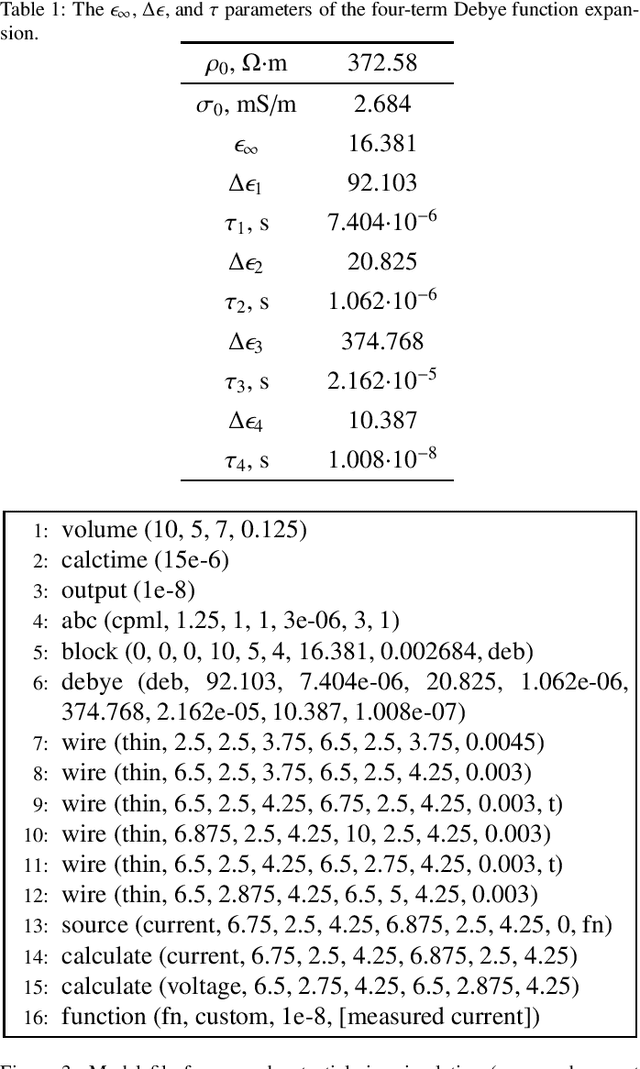
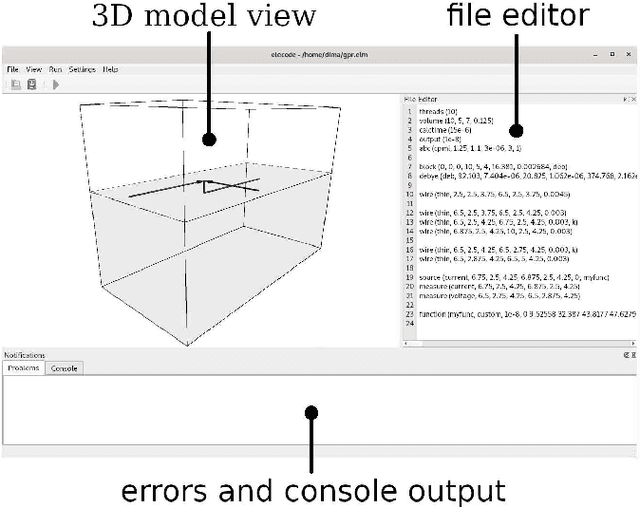
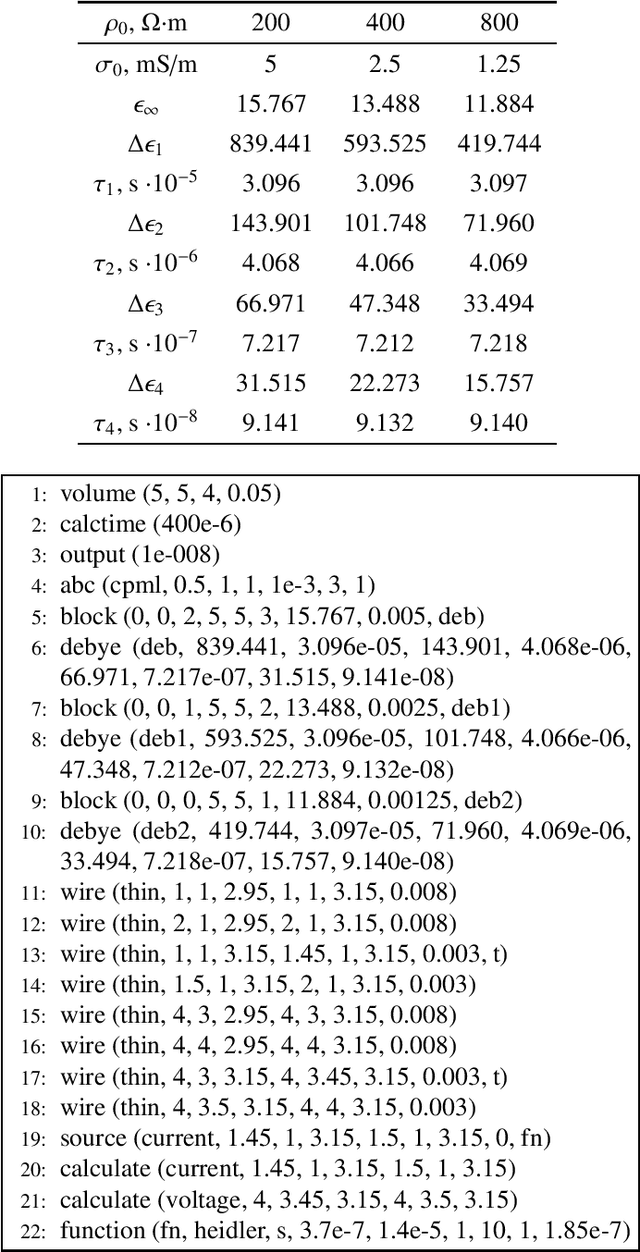
The work presents elecode, open-source software for various electrical engineering applications that require considering electromagnetic processes. The primary focus of the software is power engineering applications. However, the software does not impose any specific limitations preventing other uses. In contrast to other open-source software based on the Finite Difference Time Domain (FDTD) method, elecode implements various thin wire modeling techniques which allow simulating complex objects consisting of wires. In addition, implemented graphical user interface (GUI) helps modify models conveniently. The software provides auxiliary numerical methods for simulations and measurements of the electrical soil properties, allows conducting lightning-related simulations (including those involving isolation breakdown models), and calculations of grounding characteristics. The part of the code responsible for FDTD simulations is well tested in previous works. Recently, the code was rewritten in order to add a convenient interface for using it as a library, command-line program, or GUI program. Finally, the code was released under an open-source license. The main capabilities of the software are described in the work. Several simulation examples covering main software features are presented. elecode is available at https://gitlab.com/dmika/elecode.
Discrete Morse Sandwich: Fast Computation of Persistence Diagrams for Scalar Data -- An Algorithm and A Benchmark
Jun 27, 2022
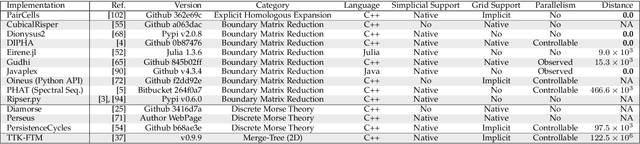
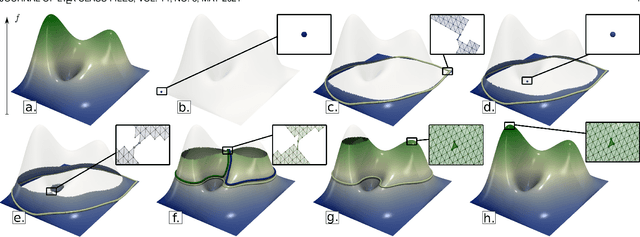

This paper introduces an efficient algorithm for persistence diagram computation, given an input piecewise linear scalar field f defined on a d-dimensional simplicial complex K, with $d \leq 3$. Our method extends the seminal "PairCells" algorithm by introducing three main accelerations. First, we express this algorithm within the setting of discrete Morse theory, which considerably reduces the number of input simplices to consider. Second, we introduce a stratification approach to the problem, that we call "sandwiching". Specifically, minima-saddle persistence pairs ($D_0(f)$) and saddle-maximum persistence pairs ($D_{d-1}(f)$) are efficiently computed by respectively processing with a Union-Find the unstable sets of 1-saddles and the stable sets of (d-1)-saddles. This fast processing of the dimensions 0 and (d-1) further reduces, and drastically, the number of critical simplices to consider for the computation of $D_1(f)$, the intermediate layer of the sandwich. Third, we document several performance improvements via shared-memory parallelism. We provide an open-source implementation of our algorithm for reproducibility purposes. We also contribute a reproducible benchmark package, which exploits three-dimensional data from a public repository and compares our algorithm to a variety of publicly available implementations. Extensive experiments indicate that our algorithm improves by two orders of magnitude the time performance of the seminal "PairCells" algorithm it extends. Moreover, it also improves memory footprint and time performance over a selection of 14 competing approaches, with a substantial gain over the fastest available approaches, while producing a strictly identical output. We illustrate the utility of our contributions with an application to the fast and robust extraction of persistent 1-dimensional generators on surfaces, volume data and high-dimensional point clouds.
Electromagnetic Signal Injection Attacks on Differential Signaling
Jul 31, 2022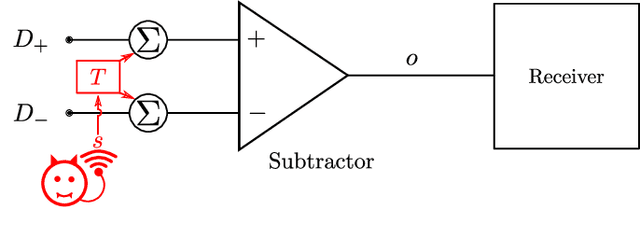
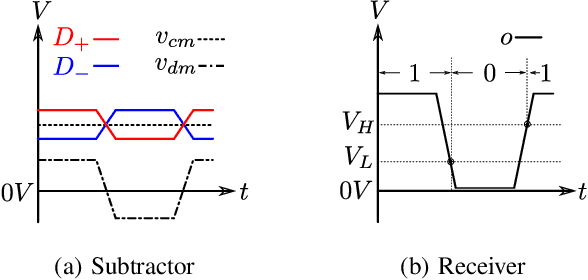
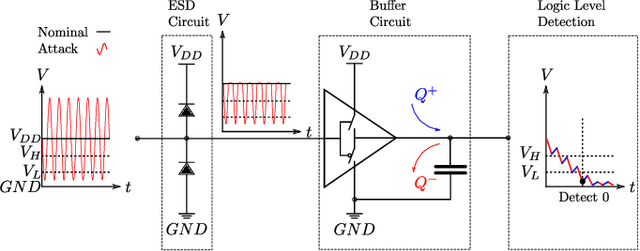
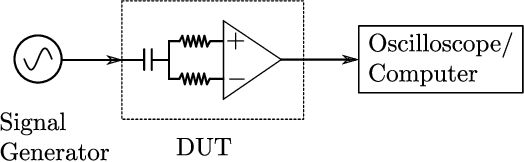
Differential signaling is a method of data transmission that uses two complementary electrical signals to encode information. This allows a receiver to reject any noise by looking at the difference between the two signals, assuming the noise affects both signals in the same way. Many protocols such as USB, Ethernet, and HDMI use differential signaling to achieve a robust communication channel in a noisy environment. This generally works well and has led many to believe that it is infeasible to remotely inject attacking signals into such a differential pair. In this paper we challenge this assumption and show that an adversary can in fact inject malicious signals from a distance, purely using common-mode injection, i.e., injecting into both wires at the same time. We show how this allows an attacker to inject bits or even arbitrary messages into a communication line. Such an attack is a significant threat to many applications, from home security and privacy to automotive systems, critical infrastructure, or implantable medical devices; in which incorrect data or unauthorized control could cause significant damage, or even fatal accidents. We show in detail the principles of how an electromagnetic signal can bypass the noise rejection of differential signaling, and eventually result in incorrect bits in the receiver. We show how an attacker can exploit this to achieve a successful injection of an arbitrary bit, and we analyze the success rate of injecting longer arbitrary messages. We demonstrate the attack on a real system and show that the success rate can reach as high as $90\%$. Finally, we present a case study where we wirelessly inject a message into a Controller Area Network (CAN) bus, which is a differential signaling bus protocol used in many critical applications, including the automotive and aviation sector.
An Enhanced Graph Representation for Machine Learning Based Automatic Intersection Management
Jul 18, 2022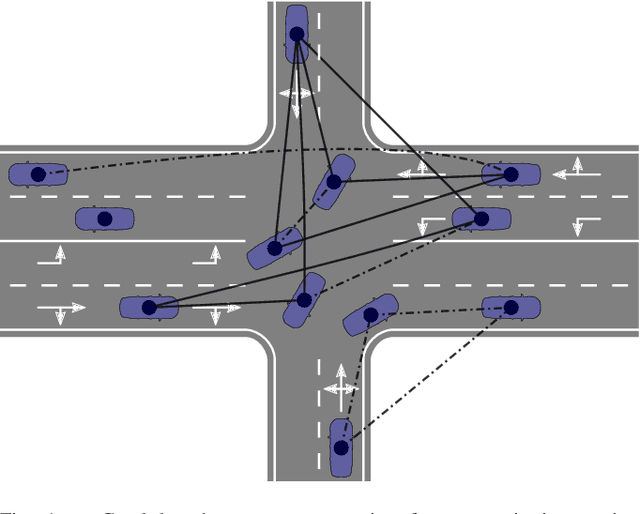
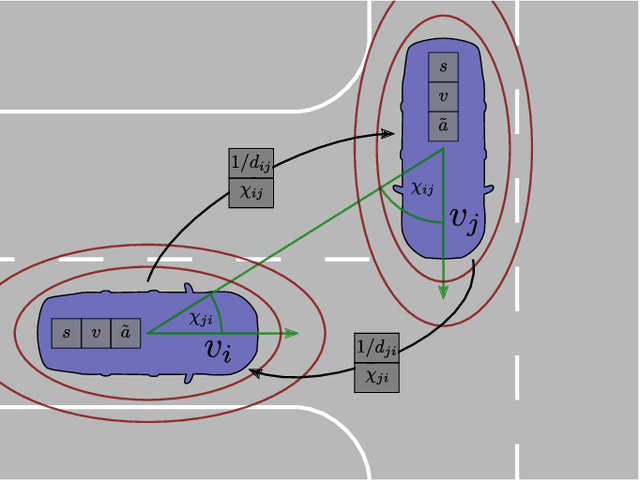
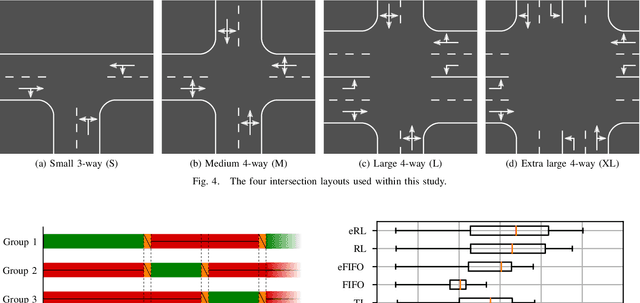
The improvement of traffic efficiency at urban intersections receives strong research interest in the field of automated intersection management. So far, mostly non-learning algorithms like reservation or optimization-based ones were proposed to solve the underlying multi-agent planning problem. At the same time, automated driving functions for a single ego vehicle are increasingly implemented using machine learning methods. In this work, we build upon a previously presented graph-based scene representation and graph neural network to approach the problem using reinforcement learning. The scene representation is improved in key aspects by using edge features in addition to the existing node features for the vehicles. This leads to an increased representation quality that is leveraged by an updated network architecture. The paper provides an in-depth evaluation of the proposed method against baselines that are commonly used in automatic intersection management. Compared to a traditional signalized intersection and an enhanced first-in-first-out scheme, a significant reduction of induced delay is observed at varying traffic densities. Finally, the generalization capability of the graph-based representation is evaluated by testing the policy on intersection layouts not seen during training. The model generalizes virtually without restrictions to smaller intersection layouts and within certain limits to larger ones.
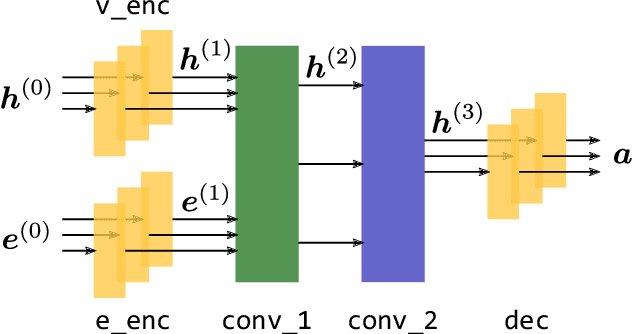
Towards Real-time and Light-weight Line Segment Detection
Jun 01, 2021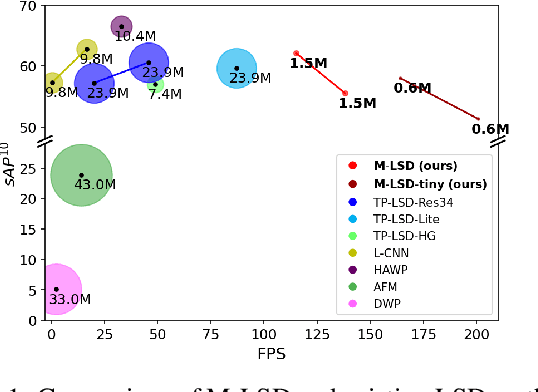
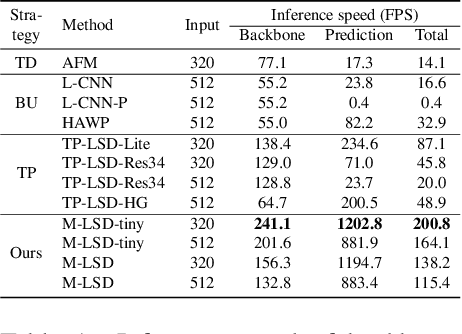
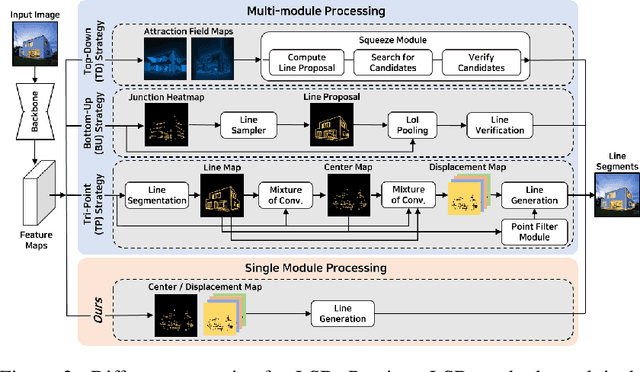
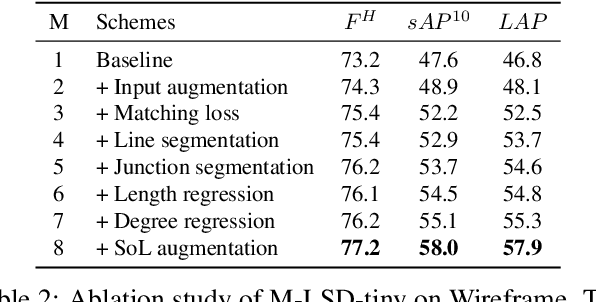
Previous deep learning-based line segment detection (LSD) suffer from the immense model size and high computational cost for line prediction. This constrains them from real-time inference on computationally restricted environments. In this paper, we propose a real-time and light-weight line segment detector for resource-constrained environments named Mobile LSD (M-LSD). We design an extremely efficient LSD architecture by minimizing the backbone network and removing the typical multi-module process for line prediction in previous methods. To maintain competitive performance with such a light-weight network, we present novel training schemes: Segments of Line segment (SoL) augmentation and geometric learning scheme. SoL augmentation splits a line segment into multiple subparts, which are used to provide auxiliary line data during the training process. Moreover, the geometric learning scheme allows a model to capture additional geometry cues from matching loss, junction and line segmentation, length and degree regression. Compared with TP-LSD-Lite, previously the best real-time LSD method, our model (M-LSD-tiny) achieves competitive performance with 2.5% of model size and an increase of 130.5% in inference speed on GPU when evaluated with Wireframe and YorkUrban datasets. Furthermore, our model runs at 56.8 FPS and 48.6 FPS on Android and iPhone mobile devices, respectively. To the best of our knowledge, this is the first real-time deep LSD method available on mobile devices.
The Brain-Inspired Decoder for Natural Visual Image Reconstruction
Jul 18, 2022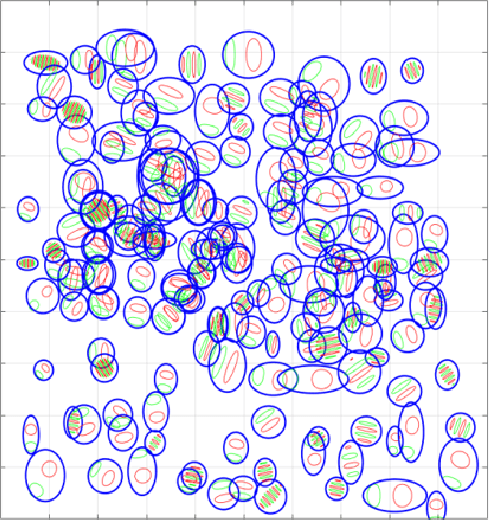
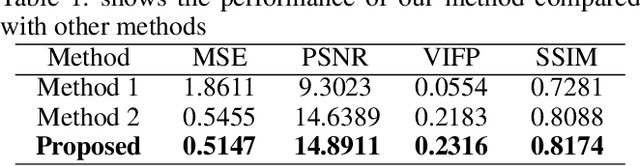
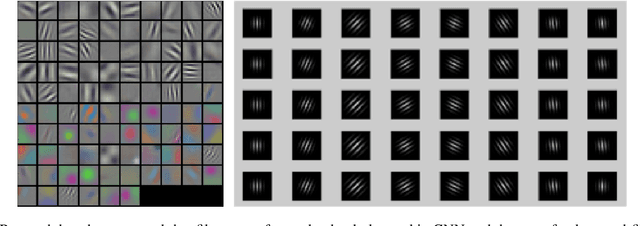
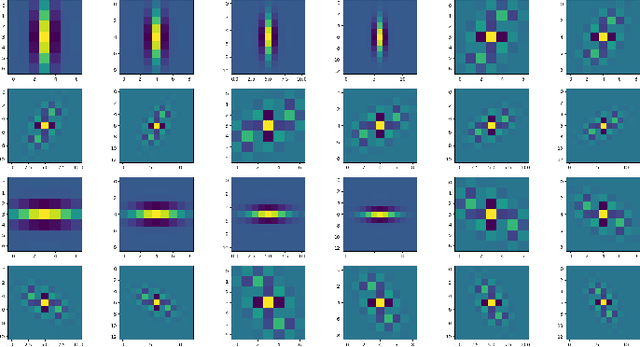
Decoding images from brain activity has been a challenge. Owing to the development of deep learning, there are available tools to solve this problem. The decoded image, which aims to map neural spike trains to low-level visual features and high-level semantic information space. Recently, there are a few studies of decoding from spike trains, however, these studies pay less attention to the foundations of neuroscience and there are few studies that merged receptive field into visual image reconstruction. In this paper, we propose a deep learning neural network architecture with biological properties to reconstruct visual image from spike trains. As far as we know, we implemented a method that integrated receptive field property matrix into loss function at the first time. Our model is an end-to-end decoder from neural spike trains to images. We not only merged Gabor filter into auto-encoder which used to generate images but also proposed a loss function with receptive field properties. We evaluated our decoder on two datasets which contain macaque primary visual cortex neural spikes and salamander retina ganglion cells (RGCs) spikes. Our results show that our method can effectively combine receptive field features to reconstruct images, providing a new approach to visual reconstruction based on neural information.