 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
libACA, pyACA, and ACA-Code: Audio Content Analysis in 3 Languages
Jun 30, 2022
The three packages libACA, pyACA, and ACA-Code provide reference implementations for basic approaches and algorithms for the analysis of musical audio signals in three different languages: C++, Python, and Matlab. All three packages cover the same algorithms, such as extraction of low level audio features, fundamental frequency estimation, as well as simple approaches to chord recognition, musical key detection, and onset detection. In addition, it implementations of more generic algorithms useful in audio content analysis such as dynamic time warping and the Viterbi algorithm are provided. The three packages thus provide a practical cross-language and cross-platform reference to students and engineers implementing audio analysis algorithms and enable implementation-focused learning of algorithms for audio content analysis and music information retrieval.
TransFA: Transformer-based Representation for Face Attribute Evaluation
Jul 12, 2022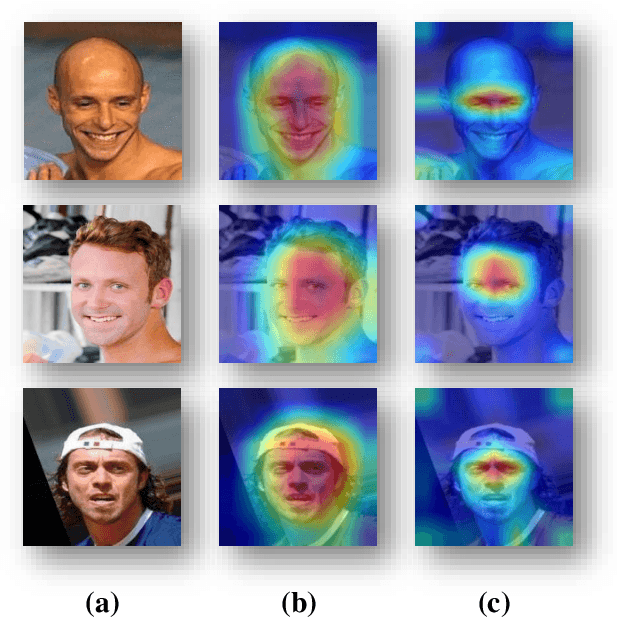
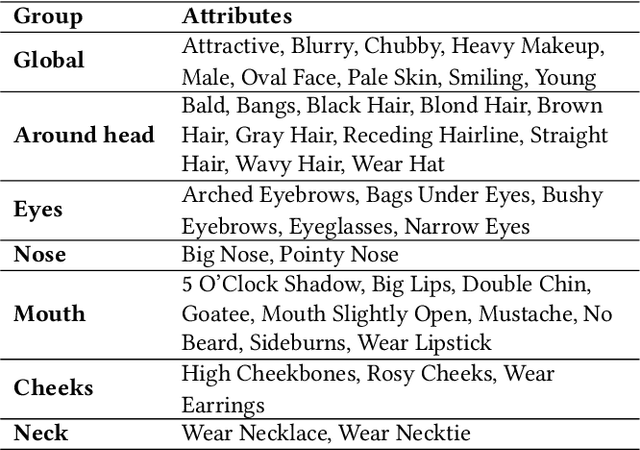
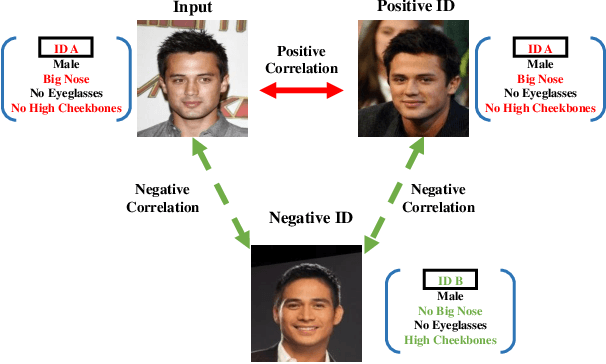
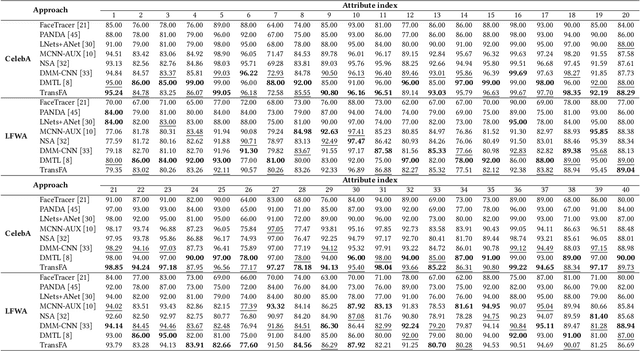
Face attribute evaluation plays an important role in video surveillance and face analysis. Although methods based on convolution neural networks have made great progress, they inevitably only deal with one local neighborhood with convolutions at a time. Besides, existing methods mostly regard face attribute evaluation as the individual multi-label classification task, ignoring the inherent relationship between semantic attributes and face identity information. In this paper, we propose a novel \textbf{trans}former-based representation for \textbf{f}ace \textbf{a}ttribute evaluation method (\textbf{TransFA}), which could effectively enhance the attribute discriminative representation learning in the context of attention mechanism. The multiple branches transformer is employed to explore the inter-correlation between different attributes in similar semantic regions for attribute feature learning. Specially, the hierarchical identity-constraint attribute loss is designed to train the end-to-end architecture, which could further integrate face identity discriminative information to boost performance. Experimental results on multiple face attribute benchmarks demonstrate that the proposed TransFA achieves superior performances compared with state-of-the-art methods.
Implicit U-Net for volumetric medical image segmentation
Jun 30, 2022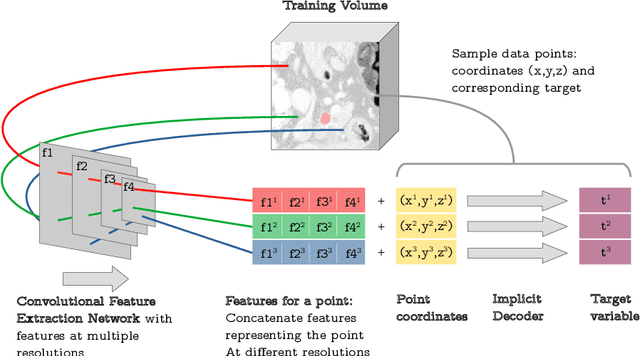
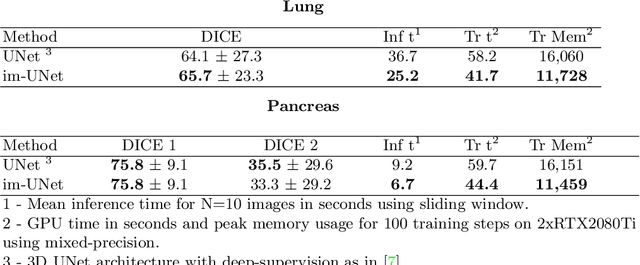
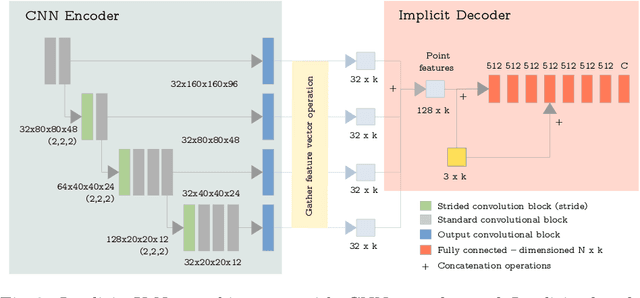
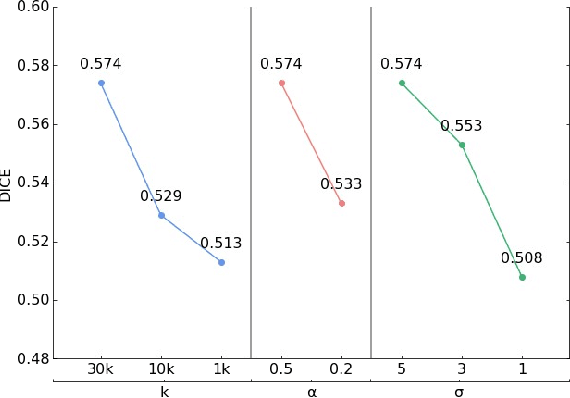
U-Net has been the go-to architecture for medical image segmentation tasks, however computational challenges arise when extending the U-Net architecture to 3D images. We propose the Implicit U-Net architecture that adapts the efficient Implicit Representation paradigm to supervised image segmentation tasks. By combining a convolutional feature extractor with an implicit localization network, our implicit U-Net has 40% less parameters than the equivalent U-Net. Moreover, we propose training and inference procedures to capitalize sparse predictions. When comparing to an equivalent fully convolutional U-Net, Implicit U-Net reduces by approximately 30% inference and training time as well as training memory footprint while achieving comparable results in our experiments with two different abdominal CT scan datasets.
Support Vector Machines with the Hard-Margin Loss: Optimal Training via Combinatorial Benders' Cuts
Jul 15, 2022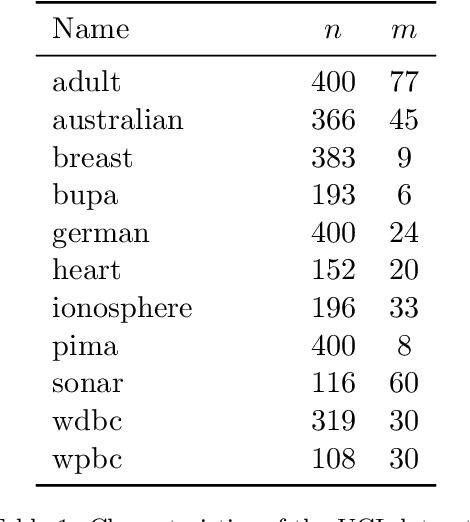
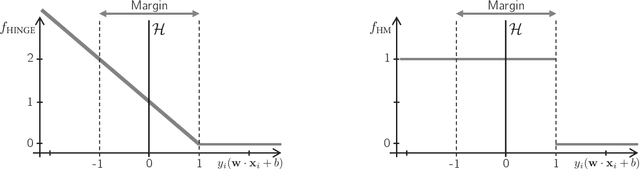

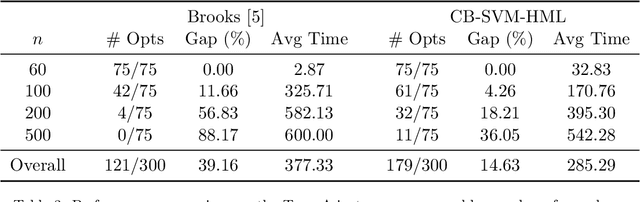
The classical hinge-loss support vector machines (SVMs) model is sensitive to outlier observations due to the unboundedness of its loss function. To circumvent this issue, recent studies have focused on non-convex loss functions, such as the hard-margin loss, which associates a constant penalty to any misclassified or within-margin sample. Applying this loss function yields much-needed robustness for critical applications but it also leads to an NP-hard model that makes training difficult, since current exact optimization algorithms show limited scalability, whereas heuristics are not able to find high-quality solutions consistently. Against this background, we propose new integer programming strategies that significantly improve our ability to train the hard-margin SVM model to global optimality. We introduce an iterative sampling and decomposition approach, in which smaller subproblems are used to separate combinatorial Benders' cuts. Those cuts, used within a branch-and-cut algorithm, permit to converge much more quickly towards a global optimum. Through extensive numerical analyses on classical benchmark data sets, our solution algorithm solves, for the first time, 117 new data sets to optimality and achieves a reduction of 50% in the average optimality gap for the hardest datasets of the benchmark.
Designing An Illumination-Aware Network for Deep Image Relighting
Jul 21, 2022
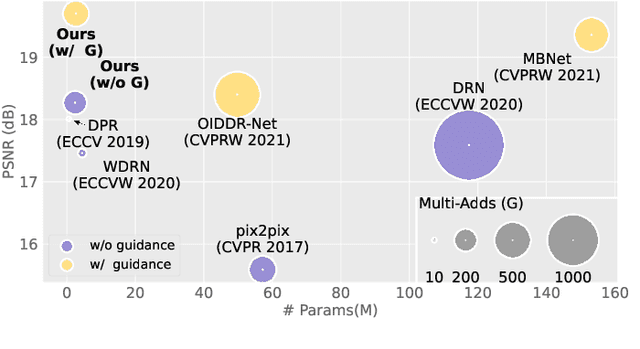
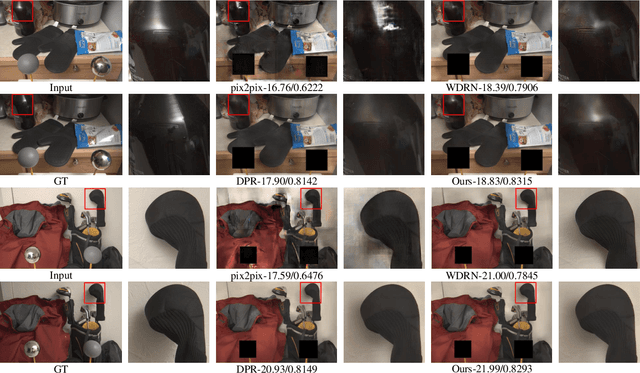
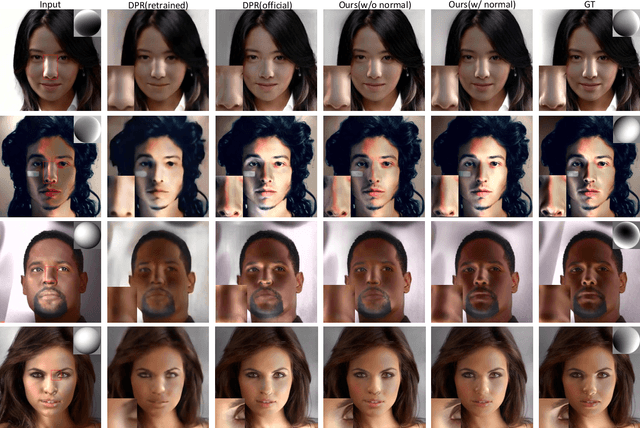
Lighting is a determining factor in photography that affects the style, expression of emotion, and even quality of images. Creating or finding satisfying lighting conditions, in reality, is laborious and time-consuming, so it is of great value to develop a technology to manipulate illumination in an image as post-processing. Although previous works have explored techniques based on the physical viewpoint for relighting images, extensive supervisions and prior knowledge are necessary to generate reasonable images, restricting the generalization ability of these works. In contrast, we take the viewpoint of image-to-image translation and implicitly merge ideas of the conventional physical viewpoint. In this paper, we present an Illumination-Aware Network (IAN) which follows the guidance from hierarchical sampling to progressively relight a scene from a single image with high efficiency. In addition, an Illumination-Aware Residual Block (IARB) is designed to approximate the physical rendering process and to extract precise descriptors of light sources for further manipulations. We also introduce a depth-guided geometry encoder for acquiring valuable geometry- and structure-related representations once the depth information is available. Experimental results show that our proposed method produces better quantitative and qualitative relighting results than previous state-of-the-art methods. The code and models are publicly available on https://github.com/NK-CS-ZZL/IAN.
On projection methods for functional time series forecasting
May 10, 2021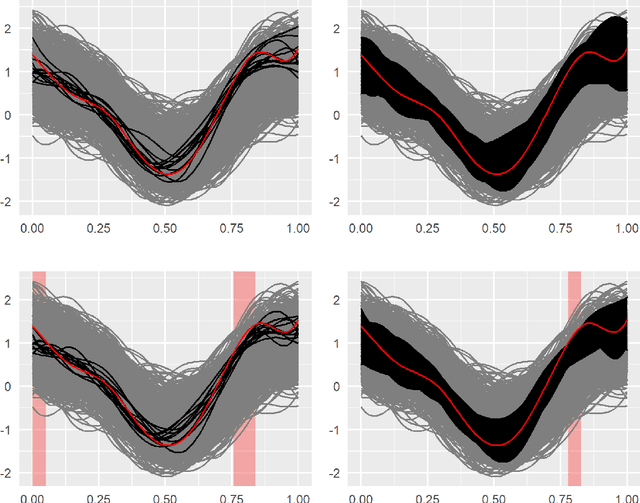
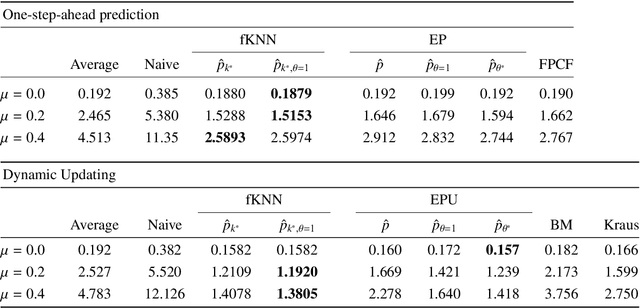
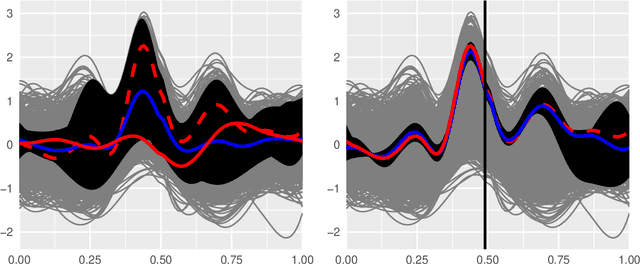
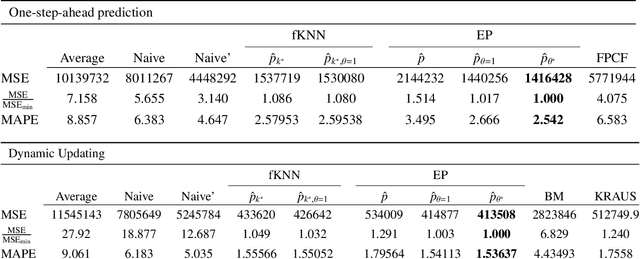
Two nonparametric methods are presented for forecasting functional time series (FTS). The FTS we observe is a curve at a discrete-time point. We address both one-step-ahead forecasting and dynamic updating. Dynamic updating is a forward prediction of the unobserved segment of the most recent curve. Among the two proposed methods, the first one is a straightforward adaptation to FTS of the $k$-nearest neighbors methods for univariate time series forecasting. The second one is based on a selection of curves, termed \emph{the curve envelope}, that aims to be representative in shape and magnitude of the most recent functional observation, either a whole curve or the observed part of a partially observed curve. In a similar fashion to $k$-nearest neighbors and other projection methods successfully used for time series forecasting, we ``project'' the $k$-nearest neighbors and the curves in the envelope for forecasting. In doing so, we keep track of the next period evolution of the curves. The methods are applied to simulated data, daily electricity demand, and NOx emissions and provide competitive results with and often superior to several benchmark predictions. The approach offers a model-free alternative to statistical methods based on FTS modeling to study the cyclic or seasonal behavior of many FTS.
Optimal Design of Electric Machine with Efficient Handling of Constraints and Surrogate Assistance
Jun 03, 2022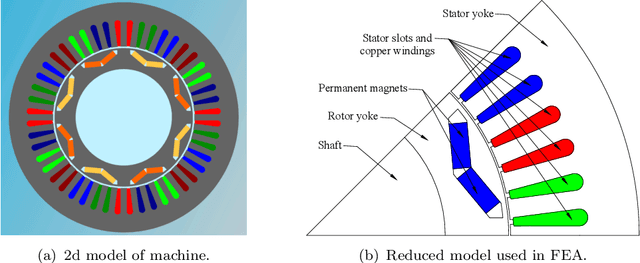
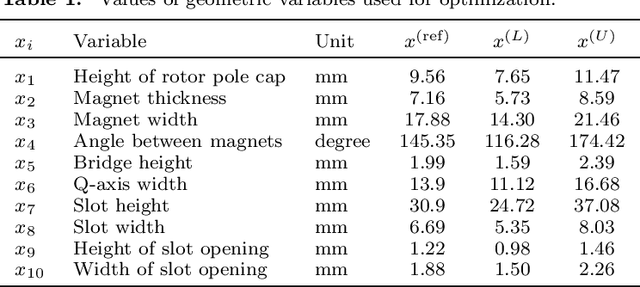
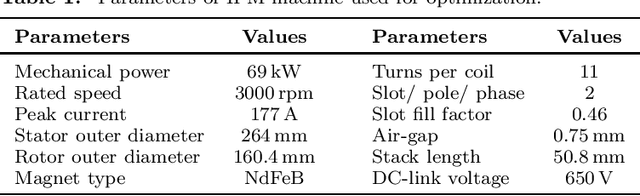
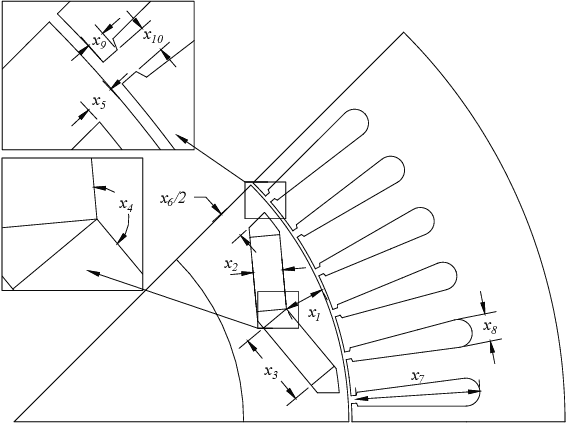
Electric machine design optimization is a computationally expensive multi-objective optimization problem. While the objectives require time-consuming finite element analysis, optimization constraints can often be based on mathematical expressions, such as geometric constraints. This article investigates this optimization problem of mixed computationally expensive nature by proposing an optimization method incorporated into a popularly-used evolutionary multi-objective optimization algorithm - NSGA-II. The proposed method exploits the inexpensiveness of geometric constraints to generate feasible designs by using a custom repair operator. The proposed method also addresses the time-consuming objective functions by incorporating surrogate models for predicting machine performance. The article successfully establishes the superiority of the proposed method over the conventional optimization approach. This study clearly demonstrates how a complex engineering design can be optimized for multiple objectives and constraints requiring heterogeneous evaluation times and optimal solutions can be analyzed to select a single preferred solution and importantly harnessed to reveal vital design features common to optimal solutions as design principles.
MACFE: A Meta-learning and Causality Based Feature Engineering Framework
Jul 08, 2022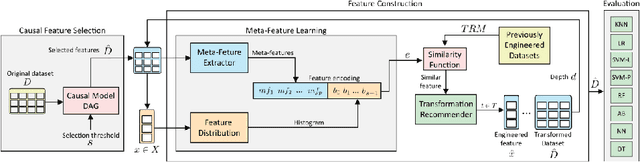
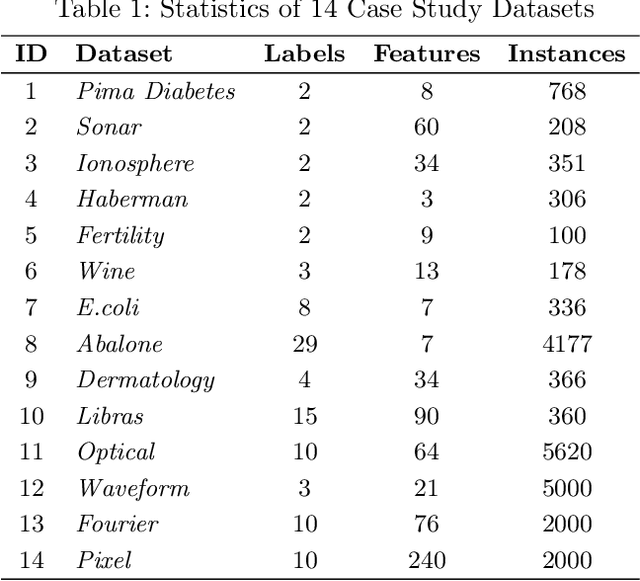
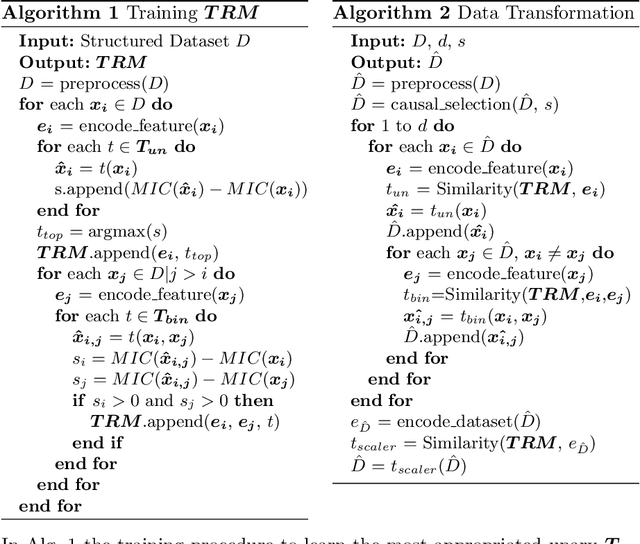
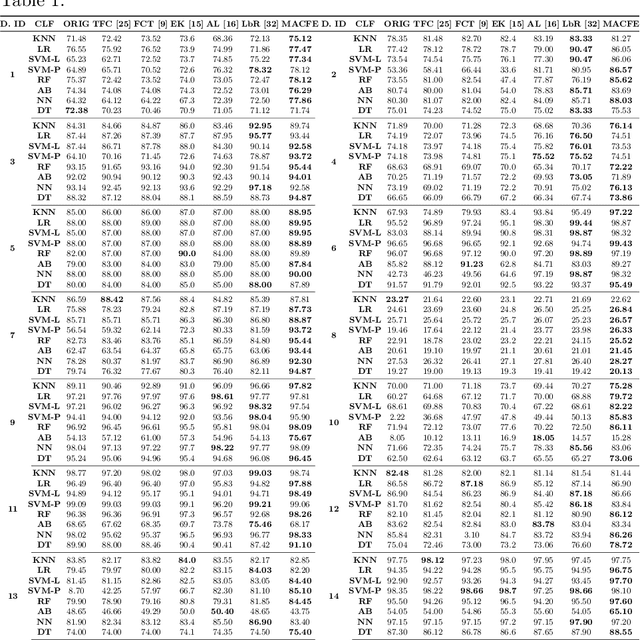
Feature engineering has become one of the most important steps to improve model prediction performance, and to produce quality datasets. However, this process requires non-trivial domain-knowledge which involves a time-consuming process. Thereby, automating such process has become an active area of research and of interest in industrial applications. In this paper, a novel method, called Meta-learning and Causality Based Feature Engineering (MACFE), is proposed; our method is based on the use of meta-learning, feature distribution encoding, and causality feature selection. In MACFE, meta-learning is used to find the best transformations, then the search is accelerated by pre-selecting "original" features given their causal relevance. Experimental evaluations on popular classification datasets show that MACFE can improve the prediction performance across eight classifiers, outperforms the current state-of-the-art methods in average by at least 6.54%, and obtains an improvement of 2.71% over the best previous works.
Electromagnetic Signal Injection Attacks on Differential Signaling
Jul 31, 2022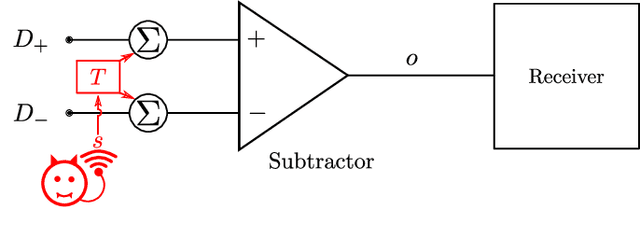
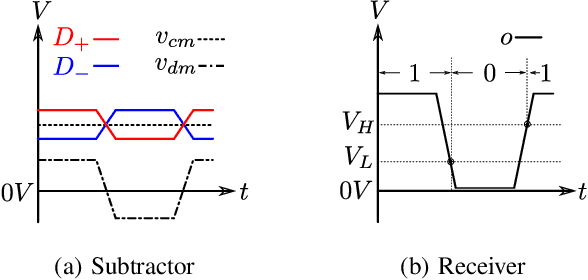
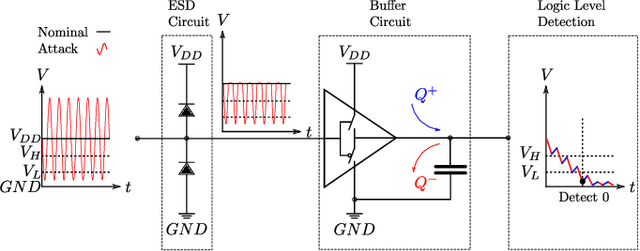
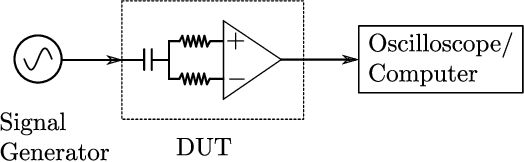
Differential signaling is a method of data transmission that uses two complementary electrical signals to encode information. This allows a receiver to reject any noise by looking at the difference between the two signals, assuming the noise affects both signals in the same way. Many protocols such as USB, Ethernet, and HDMI use differential signaling to achieve a robust communication channel in a noisy environment. This generally works well and has led many to believe that it is infeasible to remotely inject attacking signals into such a differential pair. In this paper we challenge this assumption and show that an adversary can in fact inject malicious signals from a distance, purely using common-mode injection, i.e., injecting into both wires at the same time. We show how this allows an attacker to inject bits or even arbitrary messages into a communication line. Such an attack is a significant threat to many applications, from home security and privacy to automotive systems, critical infrastructure, or implantable medical devices; in which incorrect data or unauthorized control could cause significant damage, or even fatal accidents. We show in detail the principles of how an electromagnetic signal can bypass the noise rejection of differential signaling, and eventually result in incorrect bits in the receiver. We show how an attacker can exploit this to achieve a successful injection of an arbitrary bit, and we analyze the success rate of injecting longer arbitrary messages. We demonstrate the attack on a real system and show that the success rate can reach as high as $90\%$. Finally, we present a case study where we wirelessly inject a message into a Controller Area Network (CAN) bus, which is a differential signaling bus protocol used in many critical applications, including the automotive and aviation sector.
Heuristic-free Optimization of Force-Controlled Robot Search Strategies in Stochastic Environments
Jul 15, 2022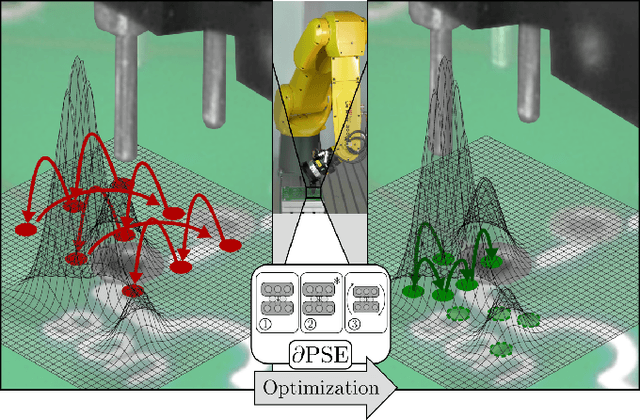

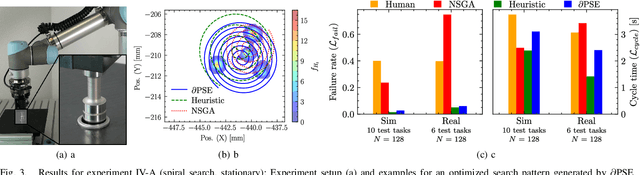
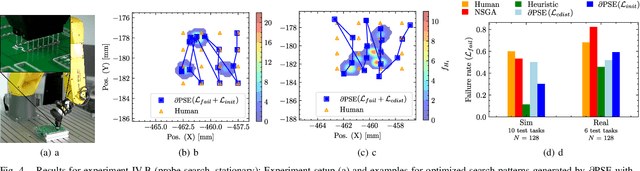
In both industrial and service domains, a central benefit of the use of robots is their ability to quickly and reliably execute repetitive tasks. However, even relatively simple peg-in-hole tasks are typically subject to stochastic variations, requiring search motions to find relevant features such as holes. While search improves robustness, it comes at the cost of increased runtime: More exhaustive search will maximize the probability of successfully executing a given task, but will significantly delay any downstream tasks. This trade-off is typically resolved by human experts according to simple heuristics, which are rarely optimal. This paper introduces an automatic, data-driven and heuristic-free approach to optimize robot search strategies. By training a neural model of the search strategy on a large set of simulated stochastic environments, conditioning it on few real-world examples and inverting the model, we can infer search strategies which adapt to the time-variant characteristics of the underlying probability distributions, while requiring very few real-world measurements. We evaluate our approach on two different industrial robots in the context of spiral and probe search for THT electronics assembly.