 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Label-Guided Auxiliary Training Improves 3D Object Detector
Jul 24, 2022
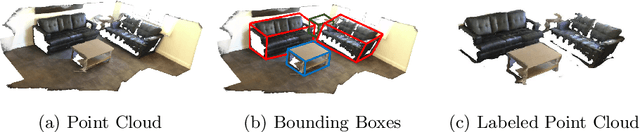
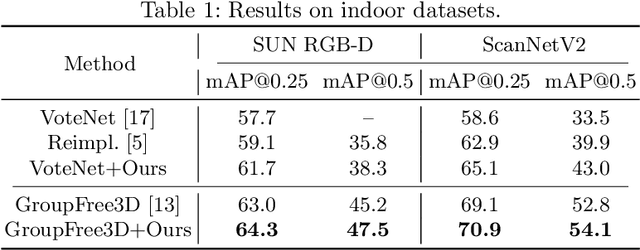
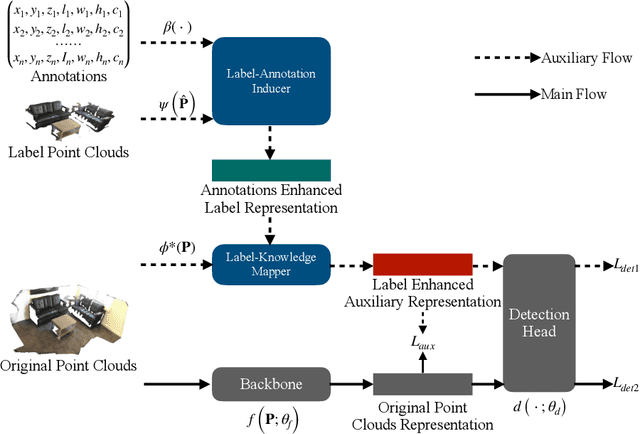
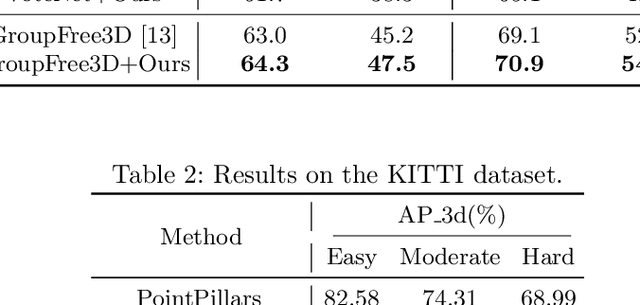
Detecting 3D objects from point clouds is a practical yet challenging task that has attracted increasing attention recently. In this paper, we propose a Label-Guided auxiliary training method for 3D object detection (LG3D), which serves as an auxiliary network to enhance the feature learning of existing 3D object detectors. Specifically, we propose two novel modules: a Label-Annotation-Inducer that maps annotations and point clouds in bounding boxes to task-specific representations and a Label-Knowledge-Mapper that assists the original features to obtain detection-critical representations. The proposed auxiliary network is discarded in inference and thus has no extra computational cost at test time. We conduct extensive experiments on both indoor and outdoor datasets to verify the effectiveness of our approach. For example, our proposed LG3D improves VoteNet by 2.5% and 3.1% mAP on the SUN RGB-D and ScanNetV2 datasets, respectively.
Automated, real-time hospital ICU emergency signaling: A field-level implementation
Nov 03, 2021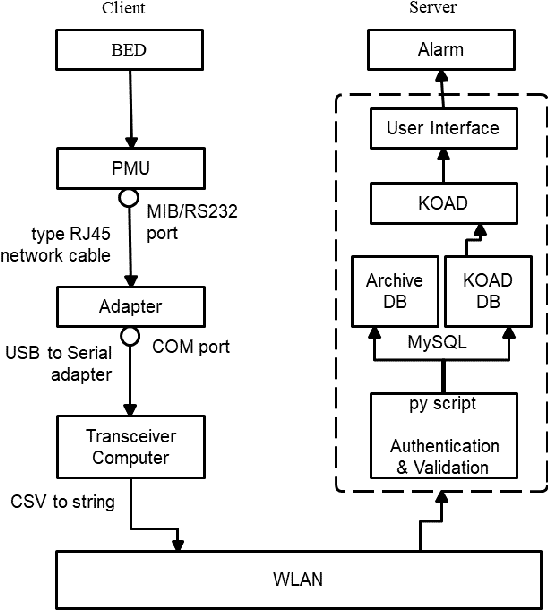
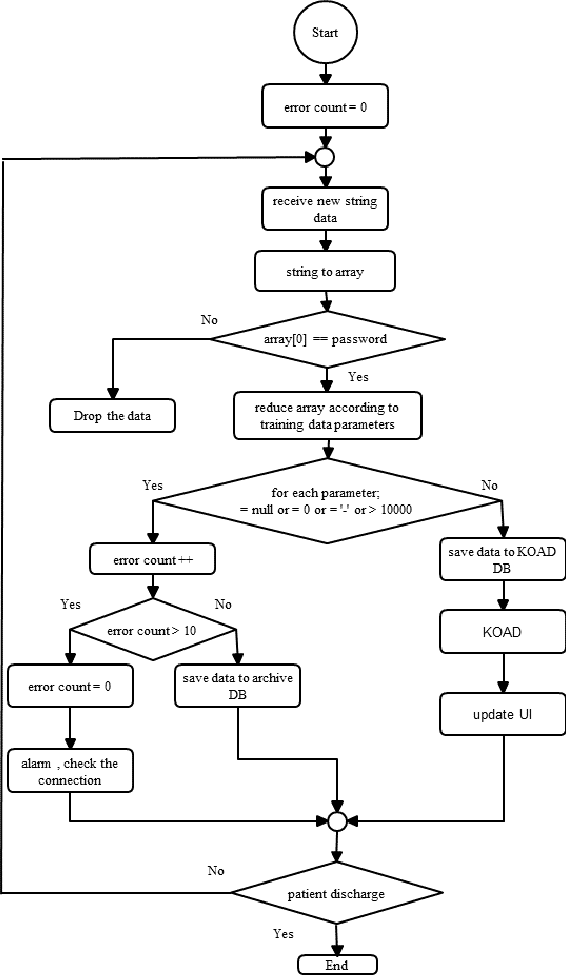
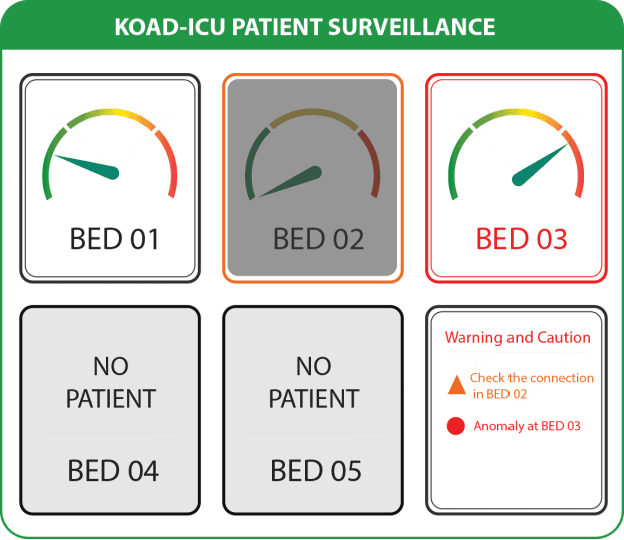
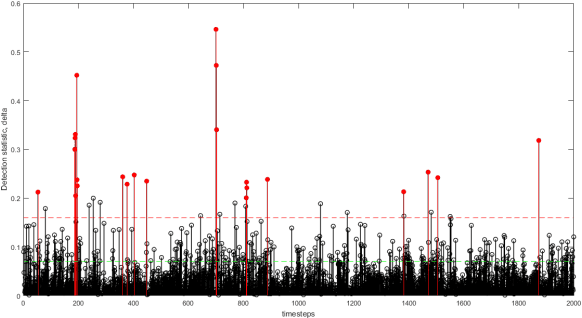
Contemporary patient surveillance systems have streamlined central surveillance into the electronic health record interface. They are able to process the sheer volume of patient data by adopting machine learning approaches. However, these systems are not suitable for implementation in many hospitals, mostly in developing countries, with limited human, financial, and technological resources. Through conducting thorough research on intensive care facilities, we designed a novel central patient monitoring system and in this paper, we describe the working prototype of our system. The proposed prototype comprises of inexpensive peripherals and simplistic user interface. Our central patient monitoring system implements Kernel-based On-line Anomaly Detection (KOAD) algorithm for emergency event signaling. By evaluating continuous patient data, we show that the system is able to detect critical events in real-time reliably and has low false alarm rate.
A computational psycholinguistic evaluation of the syntactic abilities of Galician BERT models at the interface of dependency resolution and training time
Jun 06, 2022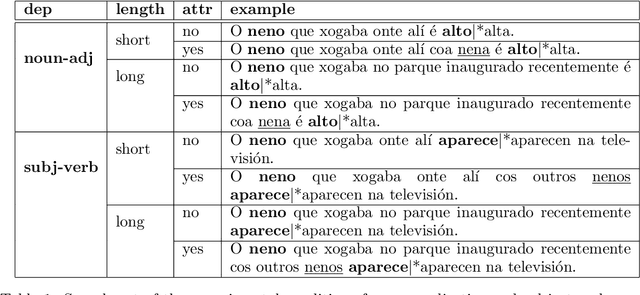
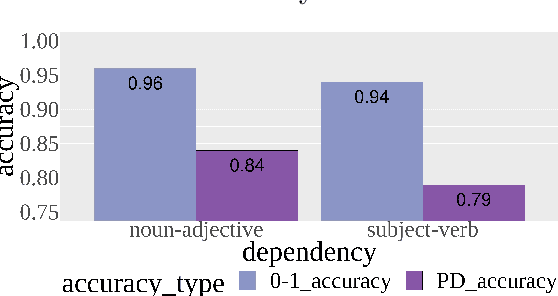
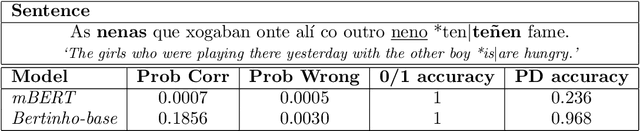
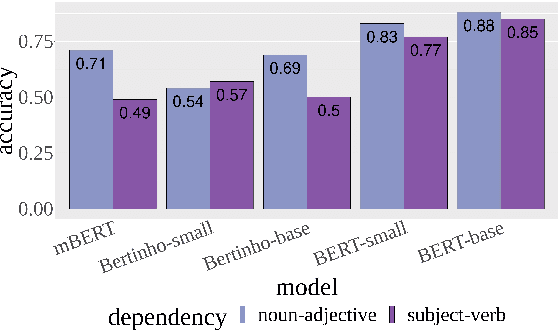
This paper explores the ability of Transformer models to capture subject-verb and noun-adjective agreement dependencies in Galician. We conduct a series of word prediction experiments in which we manipulate dependency length together with the presence of an attractor noun that acts as a lure. First, we evaluate the overall performance of the existing monolingual and multilingual models for Galician. Secondly, to observe the effects of the training process, we compare the different degrees of achievement of two monolingual BERT models at different training points. We also release their checkpoints and propose an alternative evaluation metric. Our results confirm previous findings by similar works that use the agreement prediction task and provide interesting insights into the number of training steps required by a Transformer model to solve long-distance dependencies.
Location Sensing and Beamforming Design for IRS-Enabled Multi-User ISAC Systems
Aug 10, 2022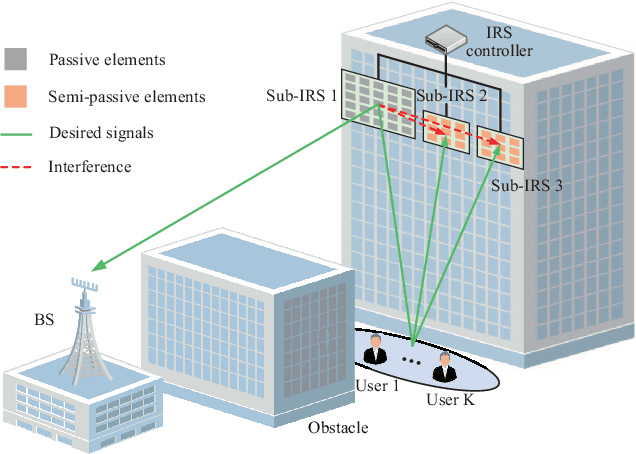
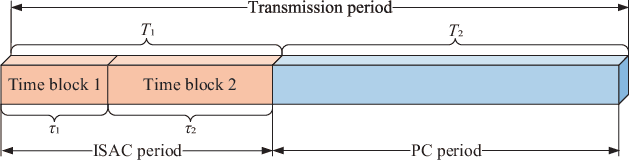
This paper explores the potential of the intelligent reflecting surface (IRS) in realizing multi-user concurrent communication and localization, using the same time-frequency resources. Specifically, we propose an IRS-enabled multi-user integrated sensing and communication (ISAC) framework, where a distributed semi-passive IRS assists the uplink data transmission from multiple users to the base station (BS) and conducts multi-user localization, simultaneously. We first design an ISAC transmission protocol, where the whole transmission period consists of two periods, i.e., the ISAC period for simultaneous uplink communication and multi-user localization, and the pure communication (PC) period for only uplink data transmission. For the ISAC period, we propose a multi-user location sensing algorithm, which utilizes the uplink communication signals unknown to the IRS, thus removing the requirement of dedicated positioning reference signals in conventional location sensing methods. Based on the sensed users' locations, we propose two novel beamforming algorithms for the ISAC period and PC period, respectively, which can work with discrete phase shifts and require no channel state information (CSI) acquisition. Numerical results show that the proposed multi-user location sensing algorithm can achieve up to millimeter-level positioning accuracy, indicating the advantage of the IRS-enabled ISAC framework. Moreover, the proposed beamforming algorithms with sensed location information and discrete phase shifts can achieve comparable performance to the benchmark considering perfect CSI acquisition and continuous phase shifts, demonstrating how the location information can ensure the communication performance.
A Deep Learning Approach for the solution of Probability Density Evolution of Stochastic Systems
Jul 05, 2022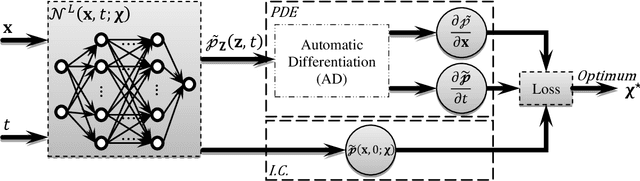
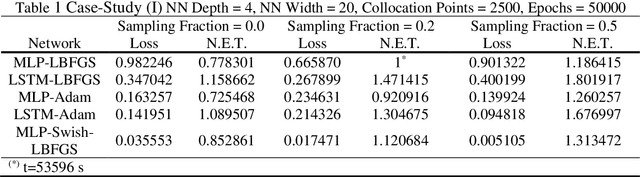
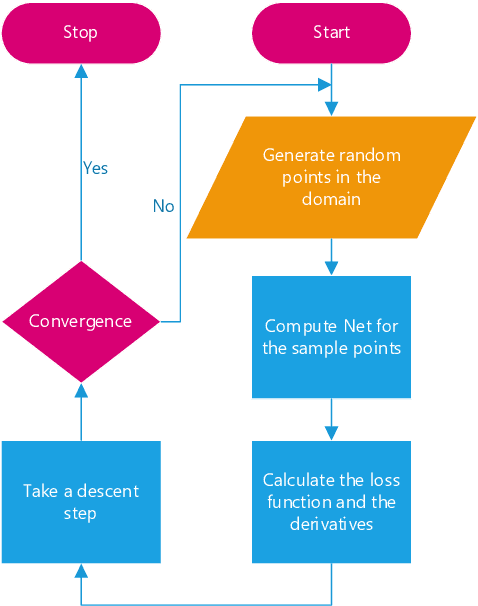
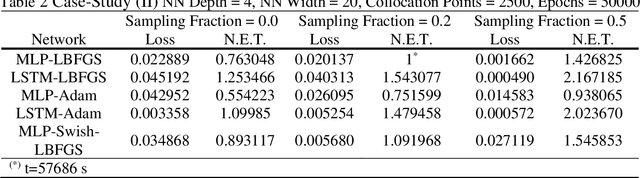
Derivation of the probability density evolution provides invaluable insight into the behavior of many stochastic systems and their performance. However, for most real-time applica-tions, numerical determination of the probability density evolution is a formidable task. The latter is due to the required temporal and spatial discretization schemes that render most computational solutions prohibitive and impractical. In this respect, the development of an efficient computational surrogate model is of paramount importance. Recent studies on the physics-constrained networks show that a suitable surrogate can be achieved by encoding the physical insight into a deep neural network. To this aim, the present work introduces DeepPDEM which utilizes the concept of physics-informed networks to solve the evolution of the probability density via proposing a deep learning method. DeepPDEM learns the General Density Evolution Equation (GDEE) of stochastic structures. This approach paves the way for a mesh-free learning method that can solve the density evolution problem with-out prior simulation data. Moreover, it can also serve as an efficient surrogate for the solu-tion at any other spatiotemporal points within optimization schemes or real-time applica-tions. To demonstrate the potential applicability of the proposed framework, two network architectures with different activation functions as well as two optimizers are investigated. Numerical implementation on three different problems verifies the accuracy and efficacy of the proposed method.
AiATrack: Attention in Attention for Transformer Visual Tracking
Jul 22, 2022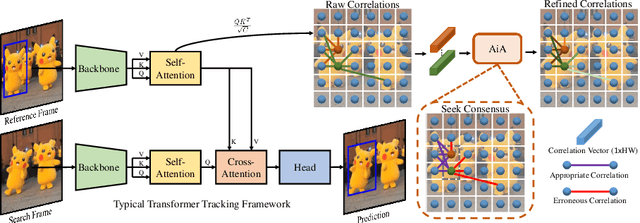
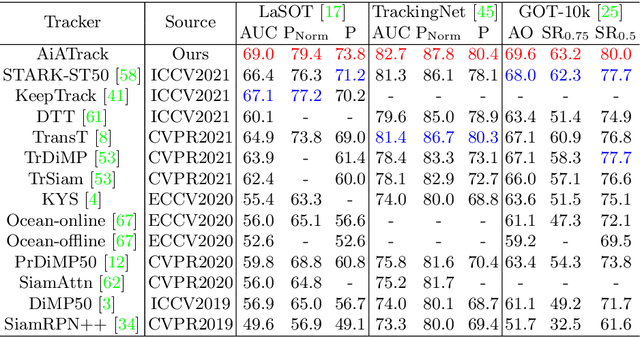
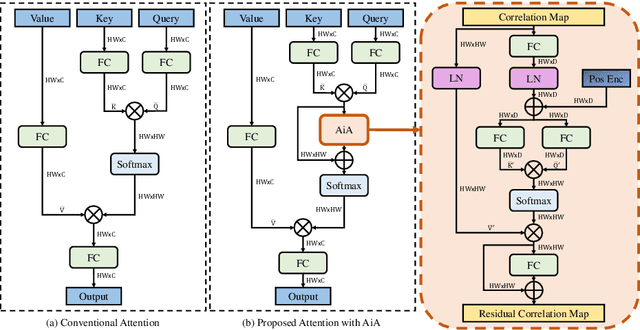
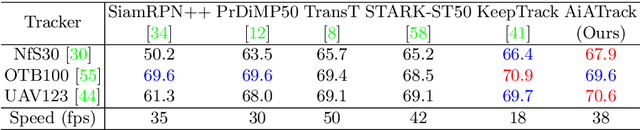
Transformer trackers have achieved impressive advancements recently, where the attention mechanism plays an important role. However, the independent correlation computation in the attention mechanism could result in noisy and ambiguous attention weights, which inhibits further performance improvement. To address this issue, we propose an attention in attention (AiA) module, which enhances appropriate correlations and suppresses erroneous ones by seeking consensus among all correlation vectors. Our AiA module can be readily applied to both self-attention blocks and cross-attention blocks to facilitate feature aggregation and information propagation for visual tracking. Moreover, we propose a streamlined Transformer tracking framework, dubbed AiATrack, by introducing efficient feature reuse and target-background embeddings to make full use of temporal references. Experiments show that our tracker achieves state-of-the-art performance on six tracking benchmarks while running at a real-time speed.
A Study on the Use of Edge TPUs for Eye Fundus Image Segmentation
Jul 26, 2022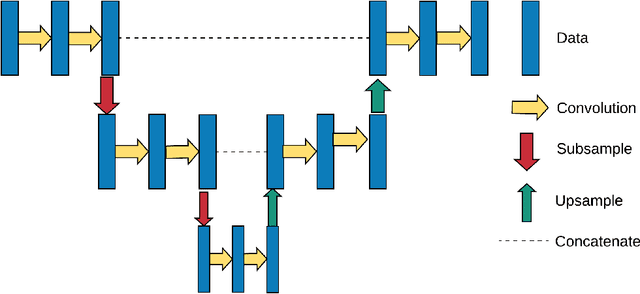
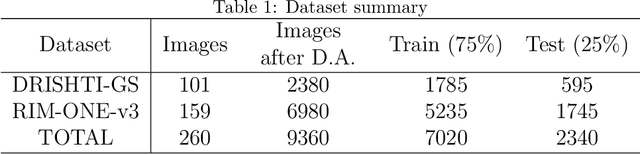
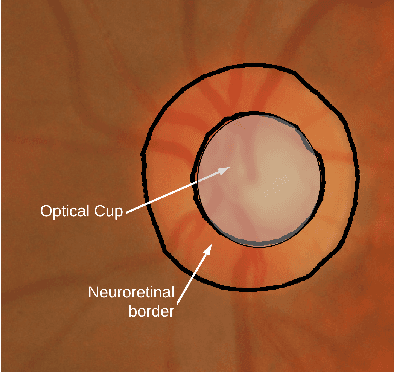
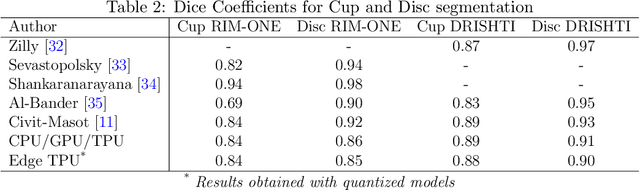
Medical image segmentation can be implemented using Deep Learning methods with fast and efficient segmentation networks. Single-board computers (SBCs) are difficult to use to train deep networks due to their memory and processing limitations. Specific hardware such as Google's Edge TPU makes them suitable for real time predictions using complex pre-trained networks. In this work, we study the performance of two SBCs, with and without hardware acceleration for fundus image segmentation, though the conclusions of this study can be applied to the segmentation by deep neural networks of other types of medical images. To test the benefits of hardware acceleration, we use networks and datasets from a previous published work and generalize them by testing with a dataset with ultrasound thyroid images. We measure prediction times in both SBCs and compare them with a cloud based TPU system. The results show the feasibility of Machine Learning accelerated SBCs for optic disc and cup segmentation obtaining times below 25 milliseconds per image using Edge TPUs.
* Preprint of paper published in Engineering Applications of Artificial Intelligence
Real-time Identification and Simultaneous Avoidance of Static and Dynamic Obstacles on Point Cloud for UAVs Navigation
Oct 20, 2021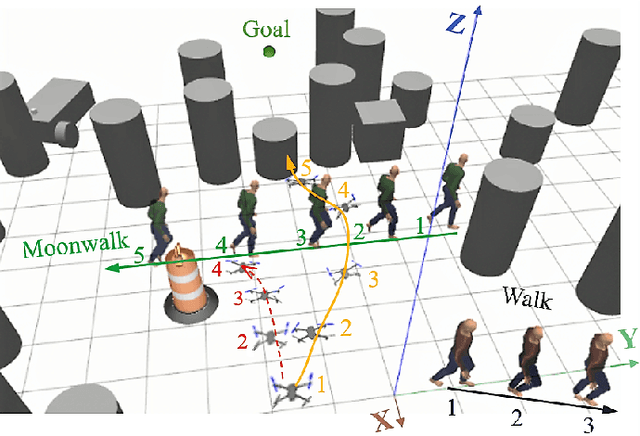
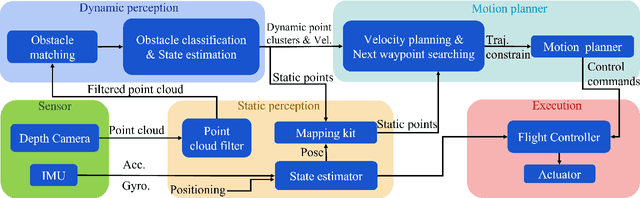
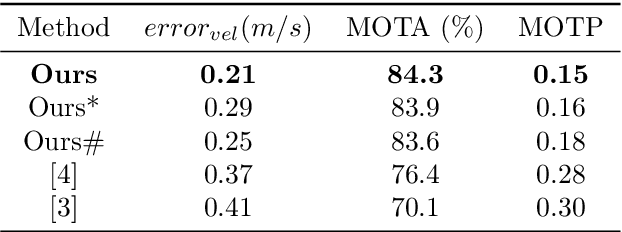
Avoiding hybrid obstacles in unknown scenarios with an efficient flight strategy is a key challenge for unmanned aerial vehicle applications. In this paper, we introduce a more robust technique to distinguish and track dynamic obstacles from static ones with only point cloud input. Then, to achieve dynamic avoidance, we propose the forbidden pyramids method to solve the desired vehicle velocity with an efficient sampling-based method in iteration. The motion primitives are generated by solving a nonlinear optimization problem with the constraint of desired velocity and the waypoint. Furthermore, we present several techniques to deal with the position estimation error for close objects, the error for deformable objects, and the time gap between different submodules. The proposed approach is implemented to run onboard in real-time and validated extensively in simulation and hardware tests, demonstrating our superiority in tracking robustness, energy cost, and calculating time.
Towards Graph Representation Learning Based Surgical Workflow Anticipation
Aug 07, 2022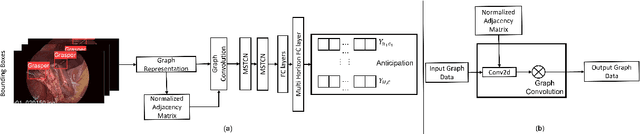
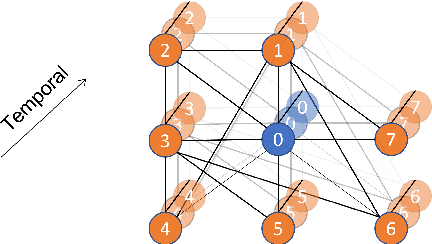
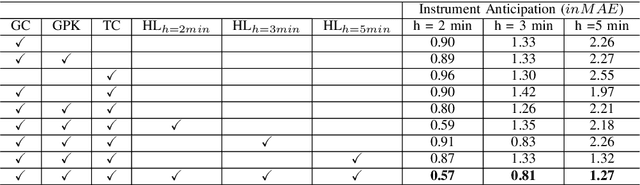
Surgical workflow anticipation can give predictions on what steps to conduct or what instruments to use next, which is an essential part of the computer-assisted intervention system for surgery, e.g. workflow reasoning in robotic surgery. However, current approaches are limited to their insufficient expressive power for relationships between instruments. Hence, we propose a graph representation learning framework to comprehensively represent instrument motions in the surgical workflow anticipation problem. In our proposed graph representation, we maps the bounding box information of instruments to the graph nodes in the consecutive frames and build inter-frame/inter-instrument graph edges to represent the trajectory and interaction of the instruments over time. This design enhances the ability of our network on modeling both the spatial and temporal patterns of surgical instruments and their interactions. In addition, we design a multi-horizon learning strategy to balance the understanding of various horizons indifferent anticipation tasks, which significantly improves the model performance in anticipation with various horizons. Experiments on the Cholec80 dataset demonstrate the performance of our proposed method can exceed the state-of-the-art method based on richer backbones, especially in instrument anticipation (1.27 v.s. 1.48 for inMAE; 1.48 v.s. 2.68 for eMAE). To the best of our knowledge, we are the first to introduce a spatial-temporal graph representation into surgical workflow anticipation.
GeoECG: Data Augmentation via Wasserstein Geodesic Perturbation for Robust Electrocardiogram Prediction
Aug 02, 2022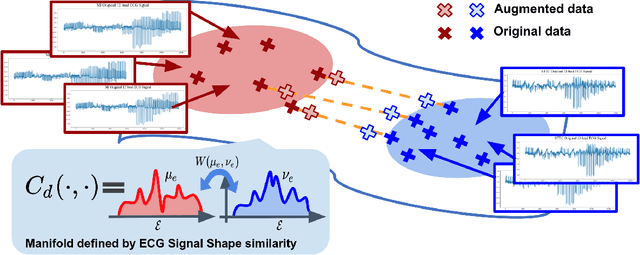
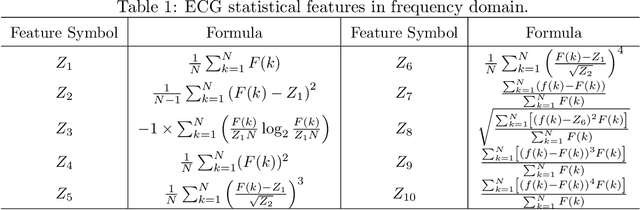

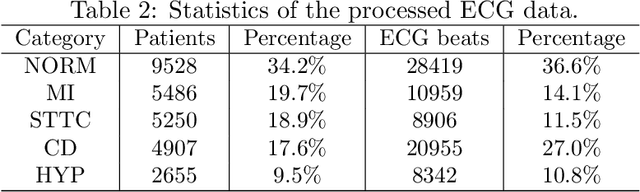
There has been an increased interest in applying deep neural networks to automatically interpret and analyze the 12-lead electrocardiogram (ECG). The current paradigms with machine learning methods are often limited by the amount of labeled data. This phenomenon is particularly problematic for clinically-relevant data, where labeling at scale can be time-consuming and costly in terms of the specialized expertise and human effort required. Moreover, deep learning classifiers may be vulnerable to adversarial examples and perturbations, which could have catastrophic consequences, for example, when applied in the context of medical treatment, clinical trials, or insurance claims. In this paper, we propose a physiologically-inspired data augmentation method to improve performance and increase the robustness of heart disease detection based on ECG signals. We obtain augmented samples by perturbing the data distribution towards other classes along the geodesic in Wasserstein space. To better utilize domain-specific knowledge, we design a ground metric that recognizes the difference between ECG signals based on physiologically determined features. Learning from 12-lead ECG signals, our model is able to distinguish five categories of cardiac conditions. Our results demonstrate improvements in accuracy and robustness, reflecting the effectiveness of our data augmentation method.
* 26 pages, Figure 13, Machine Learning for Healthcare 2022