 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Using Infant Limb Movement Data to Control Small Aerial Robots
Aug 11, 2022
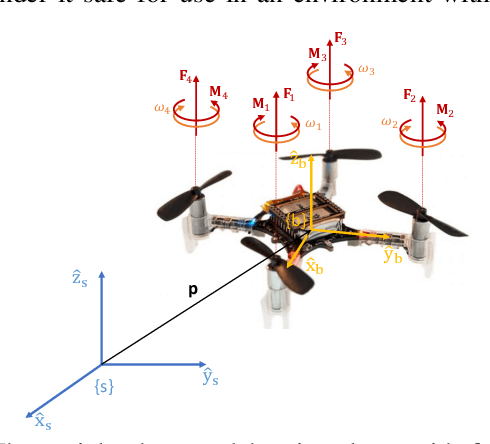
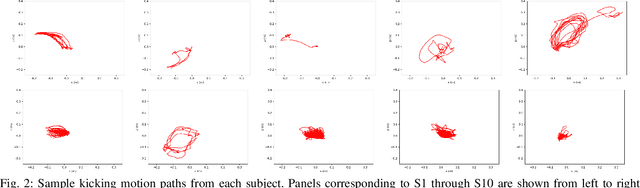
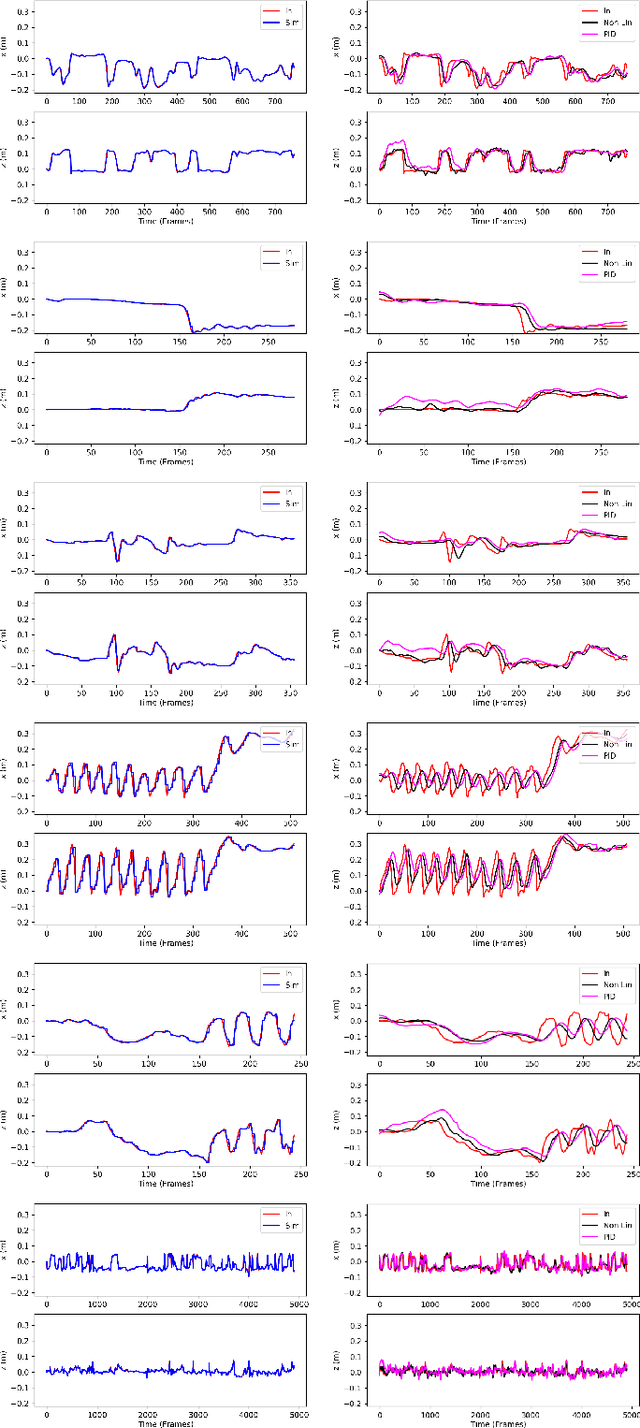
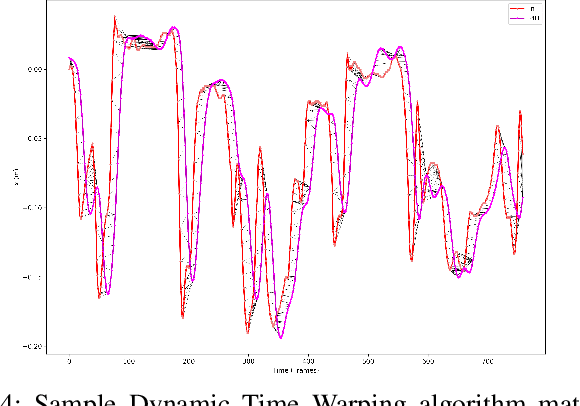
Promoting exploratory movements through contingent feedback can positively influence motor development in infancy. Our ongoing work gears toward the development of a robot-assisted contingency learning environment through the use of small aerial robots. This paper examines whether aerial robots and their associated motion controllers can be used to achieve efficient and highly-responsive robot flight for our purpose. Infant kicking kinematic data were extracted from videos and used in simulation and physical experiments with an aerial robot. The efficacy of two standard of practice controllers was assessed: a linear PID and a nonlinear geometric controller. The ability of the robot to match infant kicking trajectories was evaluated qualitatively and quantitatively via the mean squared error (to assess overall deviation from the input infant leg trajectory signals), and dynamic time warping algorithm (to quantify the signal synchrony). Results demonstrate that it is in principle possible to track infant kicking trajectories with small aerials robots, and identify areas of further development required to improve the tracking quality.
Upper Limb Movement Recognition utilising EEG and EMG Signals for Rehabilitative Robotics
Jul 25, 2022
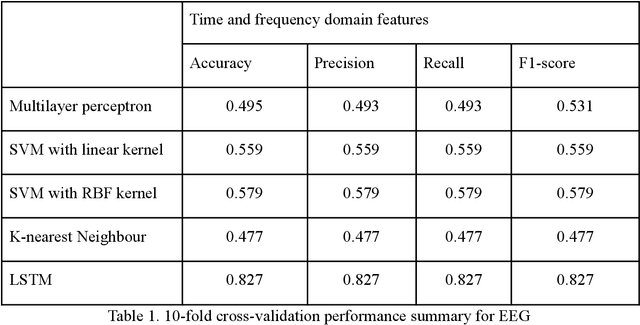
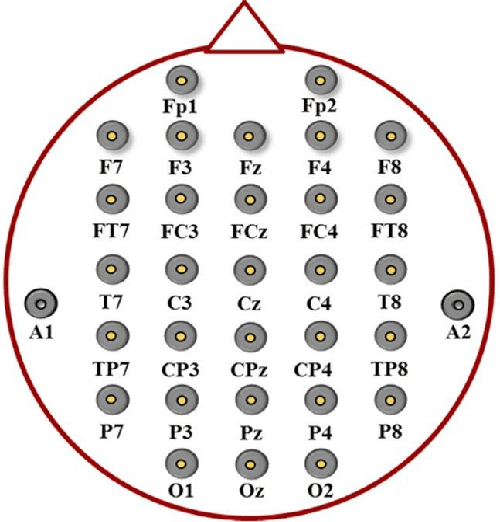
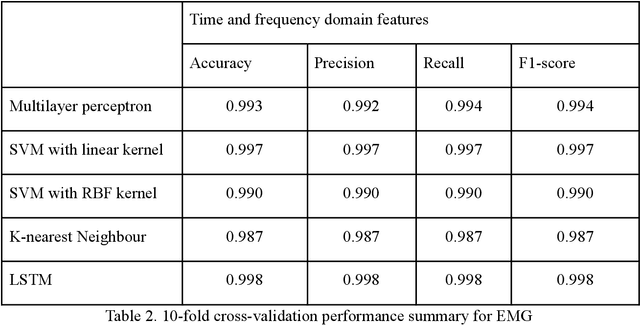
Upper limb movement classification, which maps input signals to the target activities, is one of the crucial areas in the control of rehabilitative robotics. Classifiers are trained for the rehabilitative system to comprehend the desires of the patient whose upper limbs do not function properly. Electromyography (EMG) signals and Electroencephalography (EEG) signals are used widely for upper limb movement classification. By analysing the classification results of the real-time EEG and EMG signals, the system can understand the intention of the user and predict the events that one would like to carry out. Accordingly, it will provide external help to the user to assist one to perform the activities. However, not all users process effective EEG and EMG signals due to the noisy environment. The noise in the real-time data collection process contaminates the effectiveness of the data. Moreover, not all patients process strong EMG signals due to muscle damage and neuromuscular disorder. To address these issues, we would like to propose a novel decision-level multisensor fusion technique. In short, the system will integrate EEG signals with EMG signals, retrieve effective information from both sources to understand and predict the desire of the user, and thus provide assistance. By testing out the proposed technique on a publicly available WAY-EEG-GAL dataset, which contains EEG and EMG signals that were recorded simultaneously, we manage to conclude the feasibility and effectiveness of the novel system.
Time-Series Estimation from Randomly Time-Warped Observations
Dec 02, 2021We consider the problem of estimating a signal from its warped observations. Such estimation is commonly performed by altering the observations through some inverse-warping, or solving a computationally demanding optimization formulation. While these may be unavoidable if observations are few, when large amounts of warped observations are available, the cost of running such algorithms can be prohibitive. We consider the scenario where we have many observations, and propose a computationally simple algorithm for estimating the function of interest. We demonstrate the utility of the algorithm on streaming biomedical signals.
Conformal Navigation Transformations with Application to Robot Navigation in Complex Workspaces
Aug 14, 2022
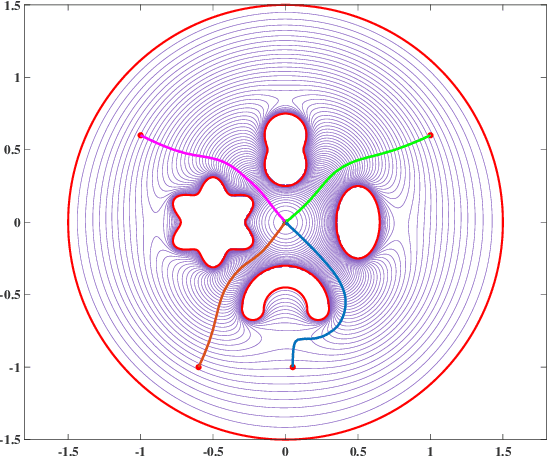
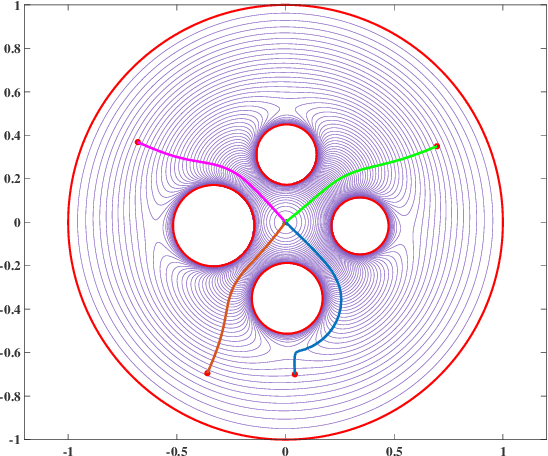
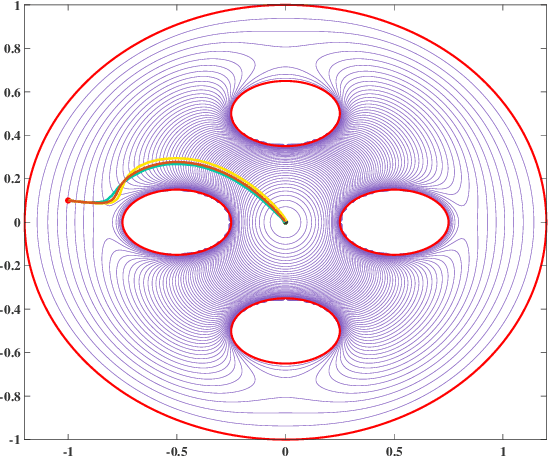
Navigation functions provide both path and motion planning, which can be used to ensure obstacle avoidance and convergence in the sphere world. When dealing with complex and realistic scenarios, constructing a transformation to the sphere world is essential and, at the same time, challenging. This work proposes a novel transformation termed the conformal navigation transformation to achieve collision-free navigation of a robot in a workspace populated with obstacles of arbitrary shapes. The properties of the conformal navigation transformation, including uniqueness, invariance of navigation properties, and no angular deformation, are investigated, which contribute to the solution of the robot navigation problem in complex environments. Based on navigation functions and the proposed transformation, feedback controllers are derived for the automatic guidance and motion control of kinematic and dynamic mobile robots. Moreover, an iterative method is proposed to construct the conformal navigation transformation in a multi-connected workspace, which transforms the multi-connected problem into multiple single-connected problems to achieve fast convergence. In addition to the analytic guarantees, simulation studies verify the effectiveness of the proposed methodology in workspaces with non-trivial obstacles.
Online Bilevel Optimization: Regret Analysis of Online Alternating Gradient Methods
Jul 06, 2022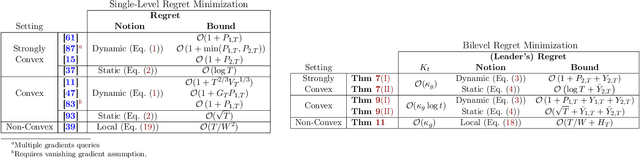
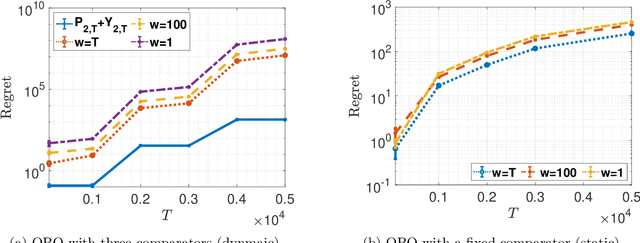
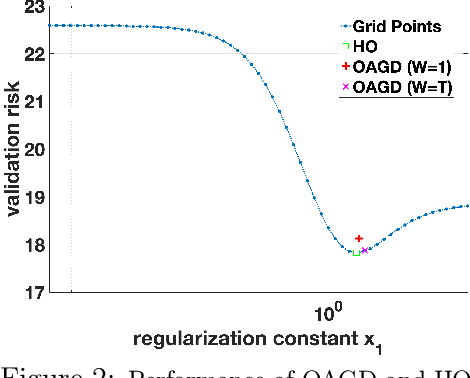
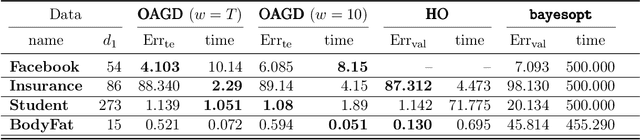
Online optimization is a well-established optimization paradigm that aims to make a sequence of correct decisions given knowledge of the correct answer to previous decision tasks. Bilevel programming involves a hierarchical optimization problem where the feasible region of the so-called outer problem is restricted by the graph of the solution set mapping of the inner problem. This paper brings these two ideas together and studies an online bilevel optimization setting in which a sequence of time-varying bilevel problems are revealed one after the other. We extend the known regret bounds for single-level online algorithms to the bilevel setting. Specifically, we introduce new notions of bilevel regret, develop an online alternating time-averaged gradient method that is capable of leveraging smoothness, and provide regret bounds in terms of the path-length of the inner and outer minimizer sequences.
Simulation-guided Beam Search for Neural Combinatorial Optimization
Jul 13, 2022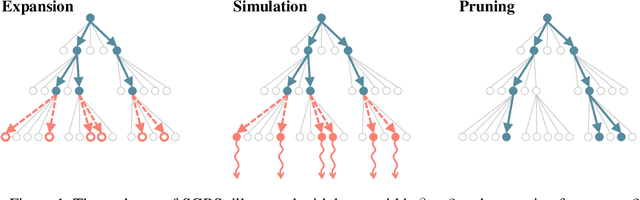
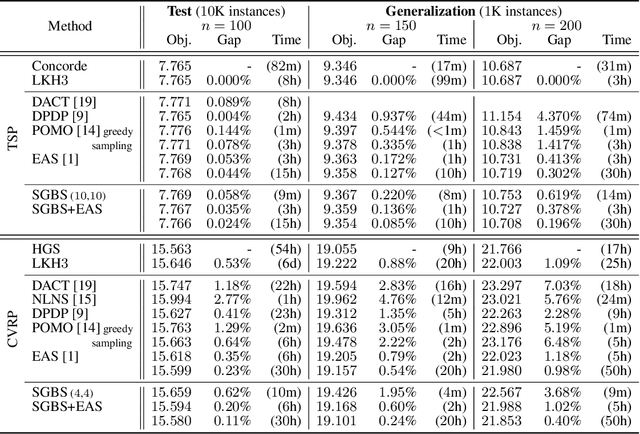
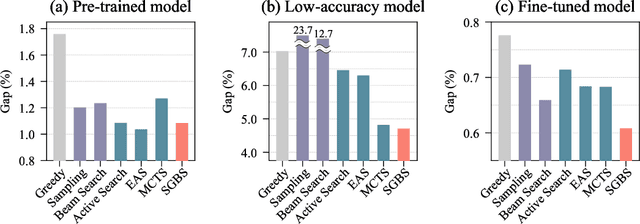
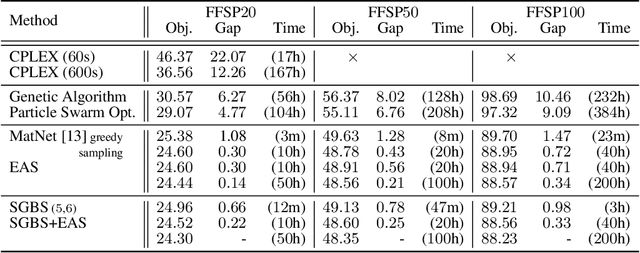
Neural approaches for combinatorial optimization (CO) equip a learning mechanism to discover powerful heuristics for solving complex real-world problems. While neural approaches capable of high-quality solutions in a single shot are emerging, state-of-the-art approaches are often unable to take full advantage of the solving time available to them. In contrast, hand-crafted heuristics perform highly effective search well and exploit the computation time given to them, but contain heuristics that are difficult to adapt to a dataset being solved. With the goal of providing a powerful search procedure to neural CO approaches, we propose simulation-guided beam search (SGBS), which examines candidate solutions within a fixed-width tree search that both a neural net-learned policy and a simulation (rollout) identify as promising. We further hybridize SGBS with efficient active search (EAS), where SGBS enhances the quality of solutions backpropagated in EAS, and EAS improves the quality of the policy used in SGBS. We evaluate our methods on well-known CO benchmarks and show that SGBS significantly improves the quality of the solutions found under reasonable runtime assumptions.
A CNN-LSTM-based hybrid deep learning approach to detect sentiment polarities on Monkeypox tweets
Aug 25, 2022
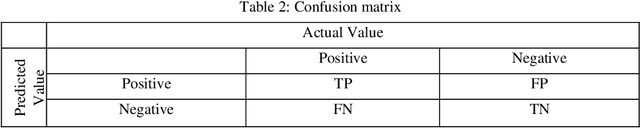
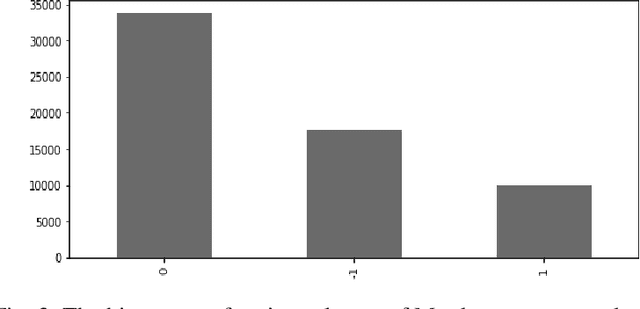
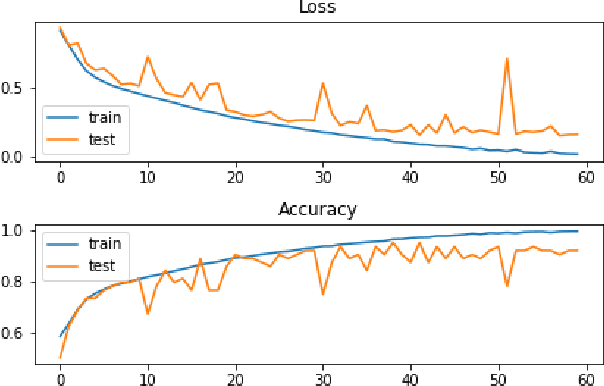
People have recently begun communicating their thoughts and viewpoints through user-generated multimedia material on social networking websites. This information can be images, text, videos, or audio. Recent years have seen a rise in the frequency of occurrence of this pattern. Twitter is one of the most extensively utilized social media sites, and it is also one of the finest locations to get a sense of how people feel about events that are linked to the Monkeypox sickness. This is because tweets on Twitter are shortened and often updated, both of which contribute to the platform's character. The fundamental objective of this study is to get a deeper comprehension of the diverse range of reactions people have in response to the presence of this condition. This study focuses on finding out what individuals think about monkeypox illnesses, which presents a hybrid technique based on CNN and LSTM. We have considered all three possible polarities of a user's tweet: positive, negative, and neutral. An architecture built on CNN and LSTM is utilized to determine how accurate the prediction models are. The recommended model's accuracy was 94% on the monkeypox tweet dataset. Other performance metrics such as accuracy, recall, and F1-score were utilized to test our models and results in the most time and resource-effective manner. The findings are then compared to more traditional approaches to machine learning. The findings of this research contribute to an increased awareness of the monkeypox infection in the general population.
A Visual Analytics Framework for Composing a Hierarchical Classification for Medieval Illuminations
Aug 20, 2022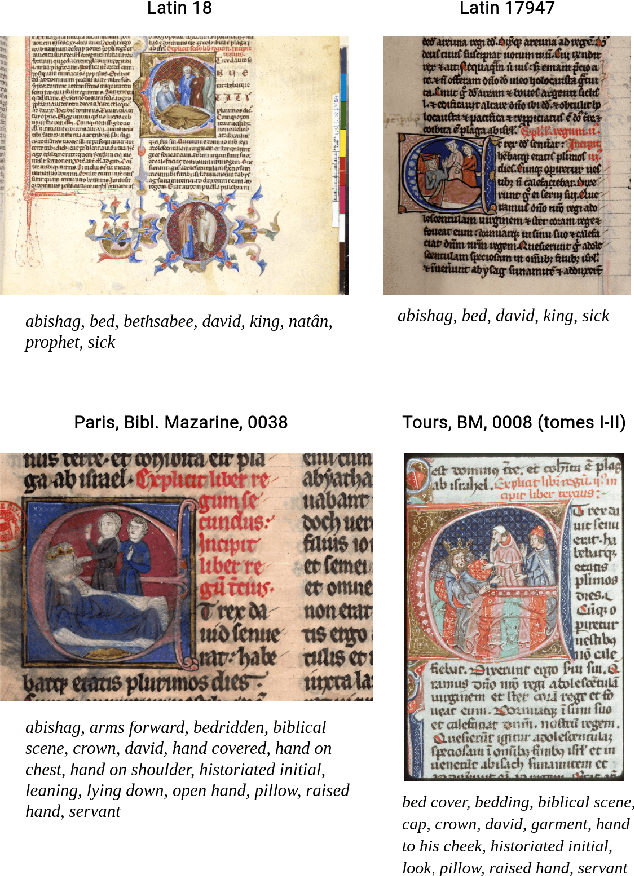
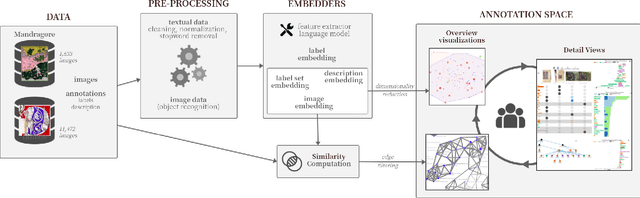
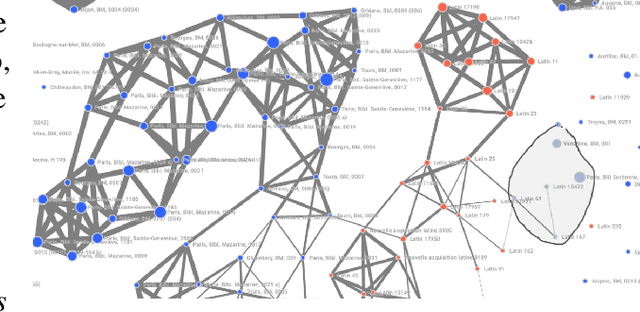
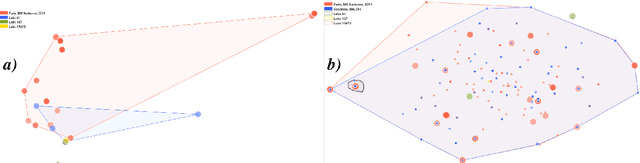
Annotated data is a requirement for applying supervised machine learning methods, and the quality of annotations is crucial for the result. Especially when working with cultural heritage collections that inhere a manifold of uncertainties, annotating data remains a manual, arduous task to be carried out by domain experts. Our project started with two already annotated sets of medieval manuscript images which however were incomplete and comprised conflicting metadata based on scholarly and linguistic differences. Our aims were to create (1) a uniform set of descriptive labels for the combined data set, and (2) a hierarchical classification of a high quality that can be used as a valuable input for supervised machine learning. To reach these goals, we developed a visual analytics system to enable medievalists to combine, regularize and extend the vocabulary used to describe these data sets. Visual interfaces for word and image embeddings as well as co-occurrences of the annotations across the data sets enable annotating multiple images at the same time, recommend annotation label candidates and support composing a hierarchical classification of labels. Our system itself implements a semi-supervised method as it updates visual representations based on the medievalists' feedback, and a series of usage scenarios document its value for the target community.
Transformer-Based Deep Learning Model for Stock Price Prediction: A Case Study on Bangladesh Stock Market
Aug 17, 2022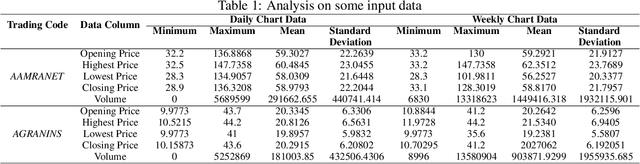
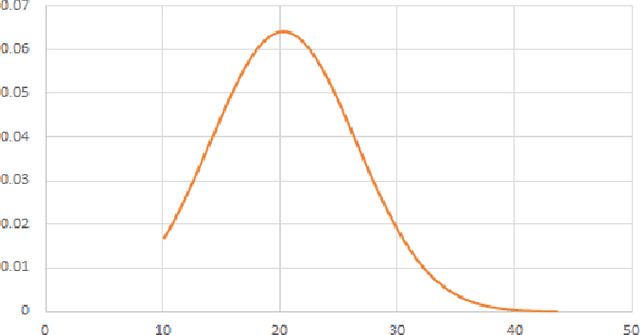
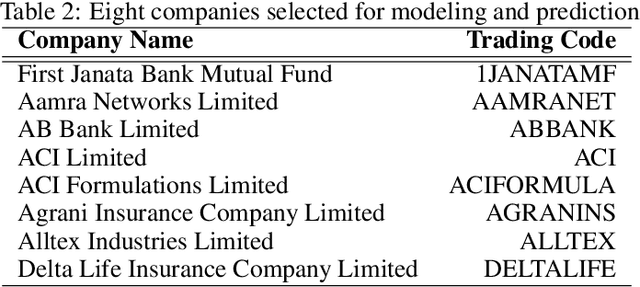

In modern capital market the price of a stock is often considered to be highly volatile and unpredictable because of various social, financial, political and other dynamic factors. With calculated and thoughtful investment, stock market can ensure a handsome profit with minimal capital investment, while incorrect prediction can easily bring catastrophic financial loss to the investors. This paper introduces the application of a recently introduced machine learning model - the Transformer model, to predict the future price of stocks of Dhaka Stock Exchange (DSE), the leading stock exchange in Bangladesh. The transformer model has been widely leveraged for natural language processing and computer vision tasks, but, to the best of our knowledge, has never been used for stock price prediction task at DSE. Recently the introduction of time2vec encoding to represent the time series features has made it possible to employ the transformer model for the stock price prediction. This paper concentrates on the application of transformer-based model to predict the price movement of eight specific stocks listed in DSE based on their historical daily and weekly data. Our experiments demonstrate promising results and acceptable root mean squared error on most of the stocks.
Scalable neural quantum states architecture for quantum chemistry
Aug 11, 2022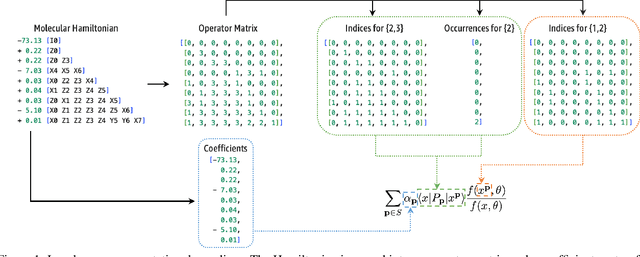
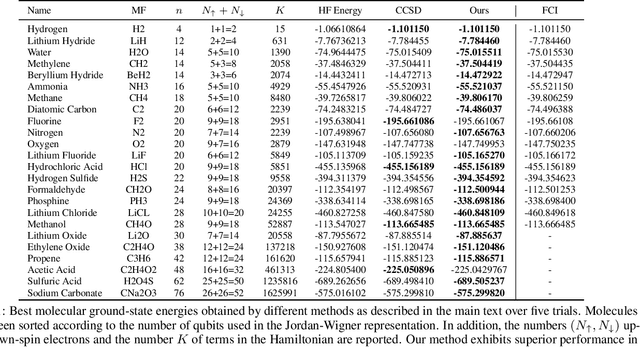
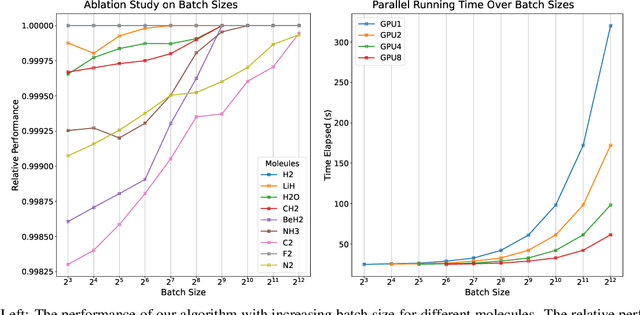
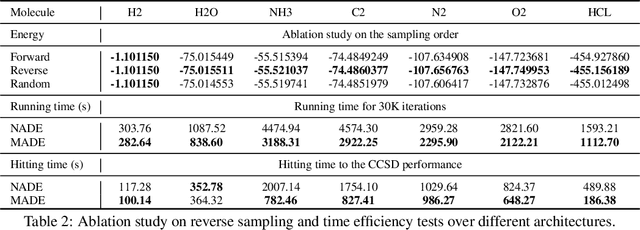
Variational optimization of neural-network representations of quantum states has been successfully applied to solve interacting fermionic problems. Despite rapid developments, significant scalability challenges arise when considering molecules of large scale, which correspond to non-locally interacting quantum spin Hamiltonians consisting of sums of thousands or even millions of Pauli operators. In this work, we introduce scalable parallelization strategies to improve neural-network-based variational quantum Monte Carlo calculations for ab-initio quantum chemistry applications. We establish GPU-supported local energy parallelism to compute the optimization objective for Hamiltonians of potentially complex molecules. Using autoregressive sampling techniques, we demonstrate systematic improvement in wall-clock timings required to achieve CCSD baseline target energies. The performance is further enhanced by accommodating the structure of resultant spin Hamiltonians into the autoregressive sampling ordering. The algorithm achieves promising performance in comparison with the classical approximate methods and exhibits both running time and scalability advantages over existing neural-network based methods.