 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Optimizing robot planning domains to reduce search time for long-horizon planning
Nov 09, 2021
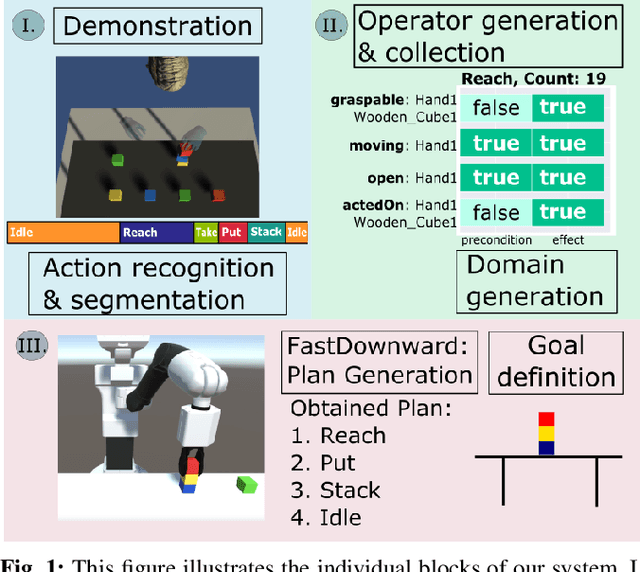
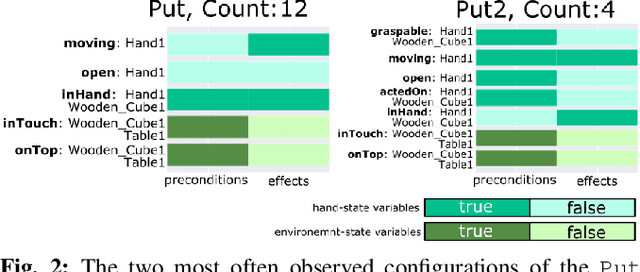
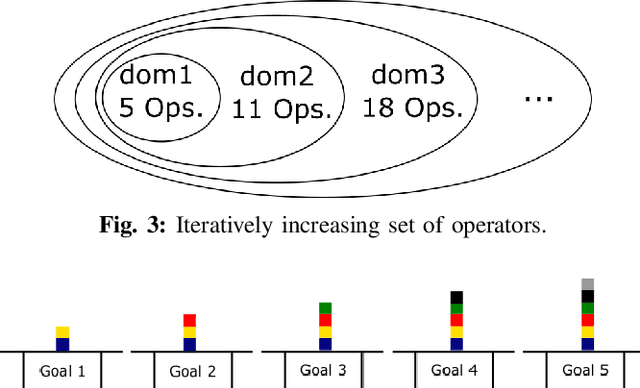
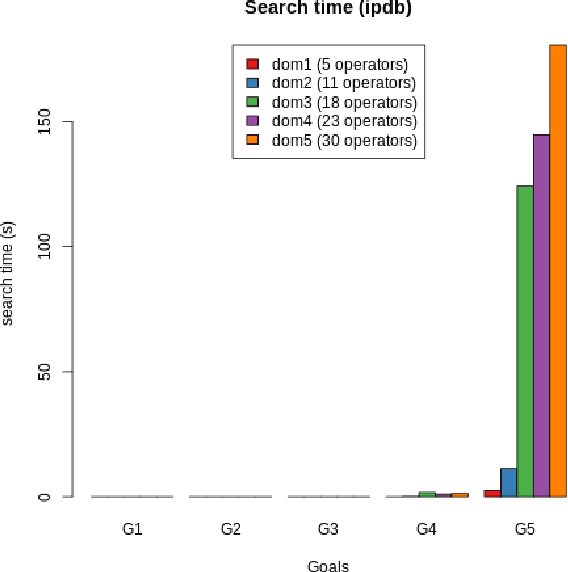
We have recently introduced a system that automatically generates robotic planning operators from human demonstrations. One feature of our system is the operator count, which keeps track of the application frequency of every operator within the demonstrations. In this extended abstract, we show that we can use the count to slim down domains with the goal of decreasing the search time for long-horizon planning goals. The conceptual idea behind our approach is that we would like to prioritize operators that have occurred more often in the demonstrations over those that were not observed so frequently. We, therefore, propose to limit the domain only to the most popular operators. If this subset of operators is not sufficient to find a plan, we iteratively expand this subset of operators. We show that this significantly reduces the search time for long-horizon planning goals.
Mask-aware IoU for Anchor Assignment in Real-time Instance Segmentation
Oct 19, 2021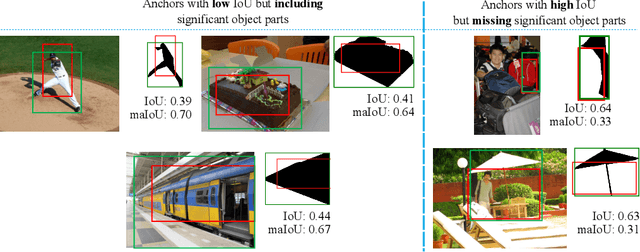
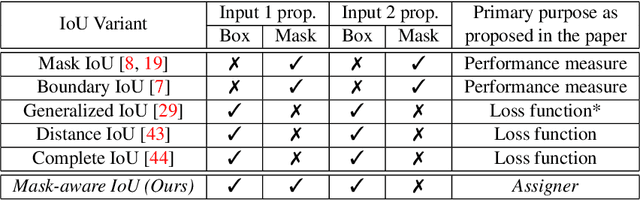
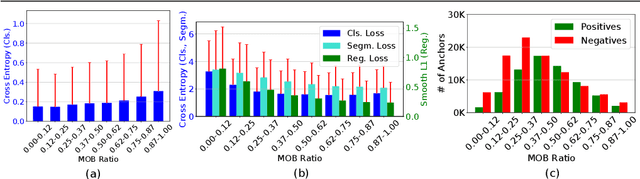
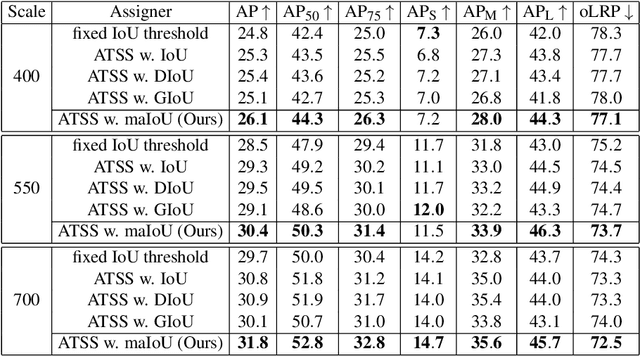
This paper presents Mask-aware Intersection-over-Union (maIoU) for assigning anchor boxes as positives and negatives during training of instance segmentation methods. Unlike conventional IoU or its variants, which only considers the proximity of two boxes; maIoU consistently measures the proximity of an anchor box with not only a ground truth box but also its associated ground truth mask. Thus, additionally considering the mask, which, in fact, represents the shape of the object, maIoU enables a more accurate supervision during training. We present the effectiveness of maIoU on a state-of-the-art (SOTA) assigner, ATSS, by replacing IoU operation by our maIoU and training YOLACT, a SOTA real-time instance segmentation method. Using ATSS with maIoU consistently outperforms (i) ATSS with IoU by $\sim 1$ mask AP, (ii) baseline YOLACT with fixed IoU threshold assigner by $\sim 2$ mask AP over different image sizes and (iii) decreases the inference time by $25 \%$ owing to using less anchors. Then, exploiting this efficiency, we devise maYOLACT, a faster and $+6$ AP more accurate detector than YOLACT. Our best model achieves $37.7$ mask AP at $25$ fps on COCO test-dev establishing a new state-of-the-art for real-time instance segmentation. Code is available at https://github.com/kemaloksuz/Mask-aware-IoU
A Robust Ensemble Model for Patasitic Egg Detection and Classification
Jul 04, 2022
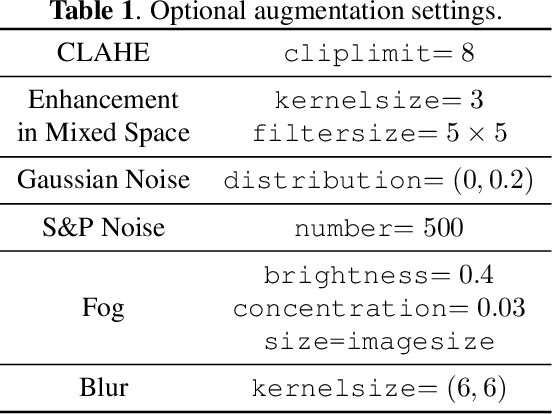
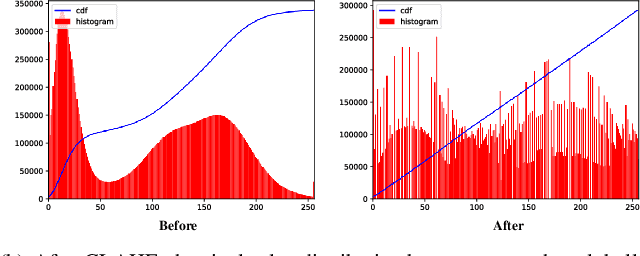
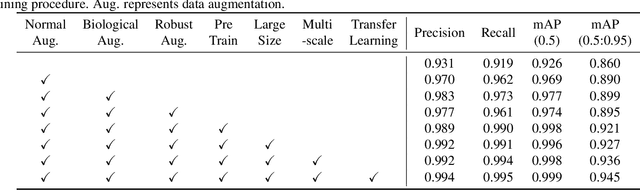
Intestinal parasitic infections, as a leading causes of morbidity worldwide, still lacks time-saving, high-sensitivity and user-friendly examination method. The development of deep learning technique reveals its broad application potential in biological image. In this paper, we apply several object detectors such as YOLOv5 and variant cascadeRCNNs to automatically discriminate parasitic eggs in microscope images. Through specially-designed optimization including raw data augmentation, model ensemble, transfer learning and test time augmentation, our model achieves excellent performance on challenge dataset. In addition, our model trained with added noise gains a high robustness against polluted input, which further broaden its applicability in practice.
Randomized K-FACs: Speeding up K-FAC with Randomized Numerical Linear Algebra
Jun 30, 2022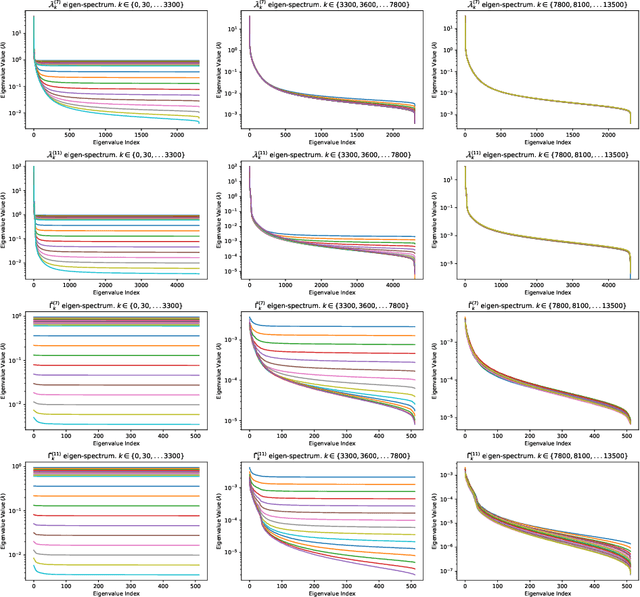

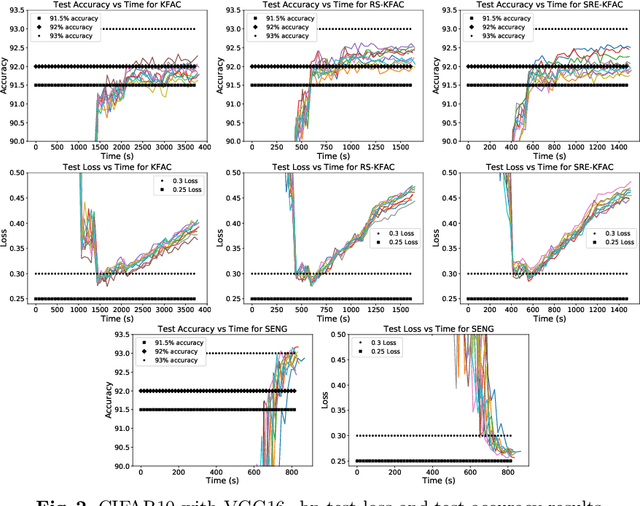
K-FAC is a successful tractable implementation of Natural Gradient for Deep Learning, which nevertheless suffers from the requirement to compute the inverse of the Kronecker factors (through an eigen-decomposition). This can be very time-consuming (or even prohibitive) when these factors are large. In this paper, we theoretically show that, owing to the exponential-average construction paradigm of the Kronecker factors that is typically used, their eigen-spectrum must decay. We show numerically that in practice this decay is very rapid, leading to the idea that we could save substantial computation by only focusing on the first few eigen-modes when inverting the Kronecker-factors. Randomized Numerical Linear Algebra provides us with the necessary tools to do so. Numerical results show we obtain $\approx2.5\times$ reduction in per-epoch time and $\approx3.3\times$ reduction in time to target accuracy. We compare our proposed K-FAC sped-up versions with a more computationally efficient NG implementation, SENG, and observe we perform on par with it.
Learn from Human Teams: a Probabilistic Solution to Real-Time Collaborative Robot Handling with Dynamic Gesture Commands
Dec 11, 2021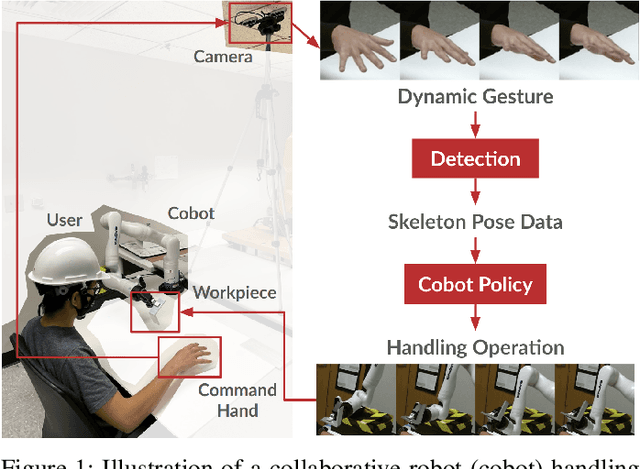
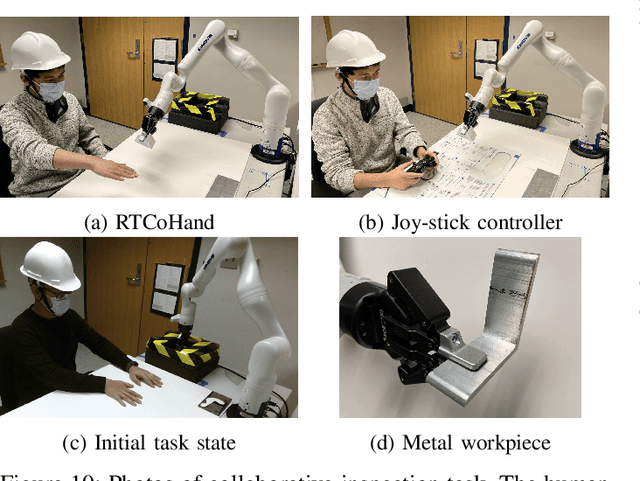
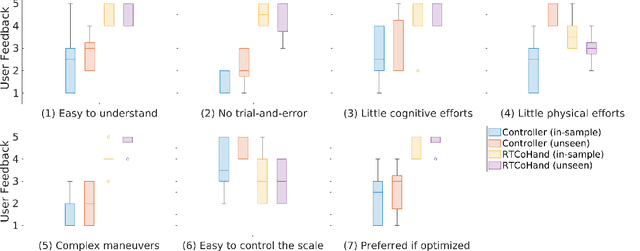
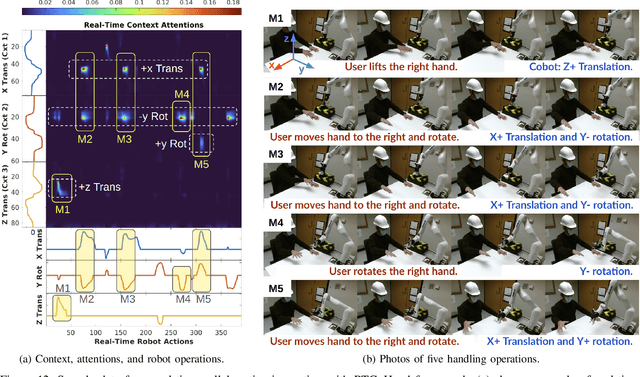
We study real-time collaborative robot (cobot) handling, where the cobot maneuvers a workpiece under human commands. This is useful when it is risky for humans to directly handle the workpiece. However, it is hard to make the cobot both easy to command and flexible in possible operations. In this work, we propose a Real-Time Collaborative Robot Handling (RTCoHand) framework that allows the control of cobot via user-customized dynamic gestures. This is hard due to variations among users, human motion uncertainties, and noisy human input. We model the task as a probabilistic generative process, referred to as Conditional Collaborative Handling Process (CCHP), and learn from human-human collaboration. We thoroughly evaluate the adaptability and robustness of CCHP and apply our approach to a real-time cobot handling task with Kinova Gen3 robot arm. We achieve seamless human-robot collaboration with both experienced and new users. Compared to classical controllers, RTCoHand allows significantly more complex maneuvers and lower user cognitive burden. It also eliminates the need for trial-and-error, rendering it advantageous in safety-critical tasks.
Short Duration Traffic Flow Prediction Using Kalman Filtering
Aug 06, 2022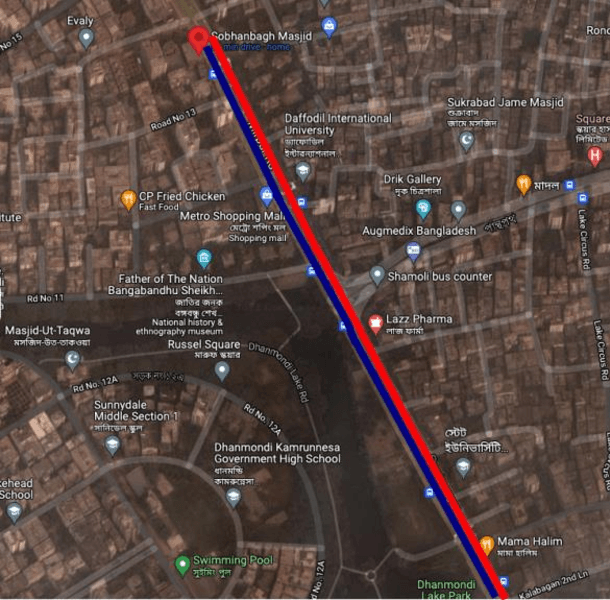
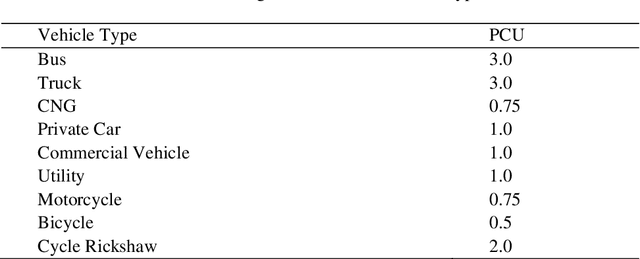
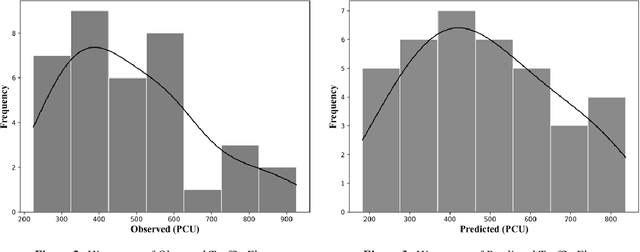
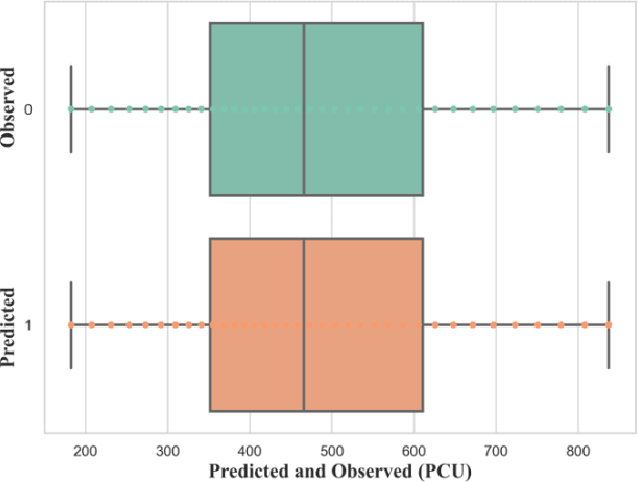
The research examined predicting short-duration traffic flow counts with the Kalman filtering technique (KFT), a computational filtering method. Short-term traffic prediction is an important tool for operation in traffic management and transportation system. The short-term traffic flow value results can be used for travel time estimation by route guidance and advanced traveler information systems. Though the KFT has been tested for homogeneous traffic, its efficiency in heterogeneous traffic has yet to be investigated. The research was conducted on Mirpur Road in Dhaka, near the Sobhanbagh Mosque. The stream contains a heterogeneous mix of traffic, which implies uncertainty in prediction. The propositioned method is executed in Python using the pykalman library. The library is mostly used in advanced database modeling in the KFT framework, which addresses uncertainty. The data was derived from a three-hour traffic count of the vehicle. According to the Geometric Design Standards Manual published by Roads and Highways Division (RHD), Bangladesh in 2005, the heterogeneous traffic flow value was translated into an equivalent passenger car unit (PCU). The PCU obtained from five-minute aggregation was then utilized as the suggested model's dataset. The propositioned model has a mean absolute percent error (MAPE) of 14.62, indicating that the KFT model can forecast reasonably well. The root mean square percent error (RMSPE) shows an 18.73% accuracy which is less than 25%; hence the model is acceptable. The developed model has an R2 value of 0.879, indicating that it can explain 87.9 percent of the variability in the dataset. If the data were collected over a more extended period of time, the R2 value could be closer to 1.0.
Improved Calibration Procedure for Wireless Inertial Measurement Units without Precision Equipment
Jul 11, 2022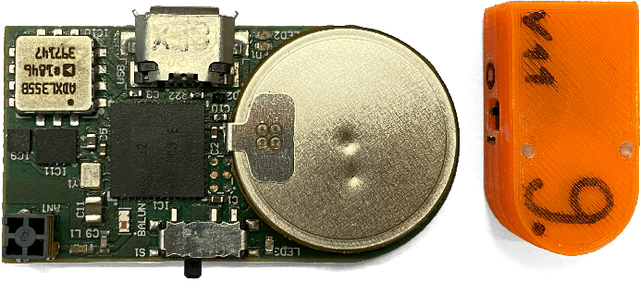
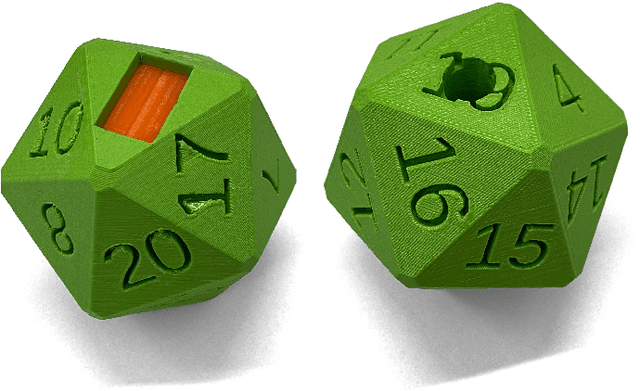
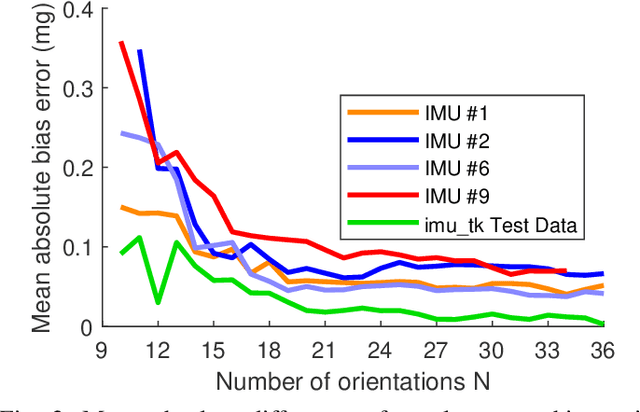
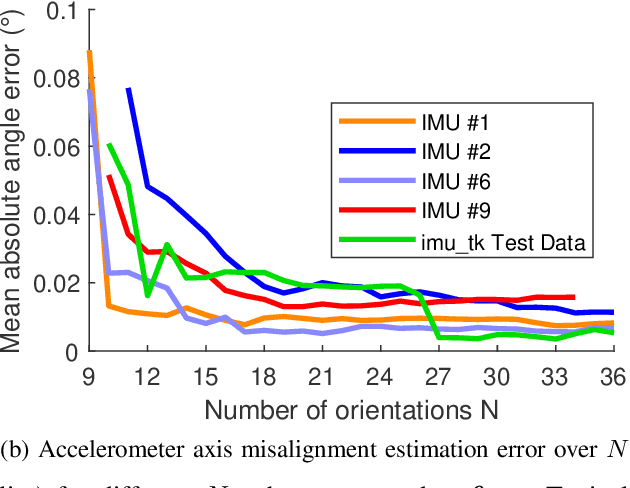
Inertial measurement units (IMUs) are used in medical applications for many different purposes. However, an IMU's measurement accuracy can degrade over time, entailing re-calibration. In their 2014 paper, Tedaldi et al. presented an IMU calibration method that does not require external precision equipment or complex procedures. This allows end-users or personnel without expert knowledge of inertial measurement to re-calibrate the sensors by placing them in several suitable but not precisely defined orientations. In this work, we present several improvements to Tedaldi's method, both on the algorithmic level and the calibration procedure: adaptions for low noise accelerometers, a calibration helper object, and packet loss compensation for wireless calibration. We applied the modified calibration procedure to our custom-built IMU platform and verified the consistency of results across multiple calibration runs. In order to minimize the time needed for re-calibration, we analyzed how the calibration result accuracy degrades when fewer calibration orientations are used. We found that N=12 different orientations are sufficient to achieve a very good calibration, and more orientations yielded only marginal improvements. This is a significant improvement compared to the 37 to 50 orientations recommended by Tedaldi. Thus, we were reduced the time required to calibrate a single IMU from ca. 5 minutes to less than 2 minutes without sacrificing any meaningful calibration accuracy.
Voxurf: Voxel-based Efficient and Accurate Neural Surface Reconstruction
Aug 29, 2022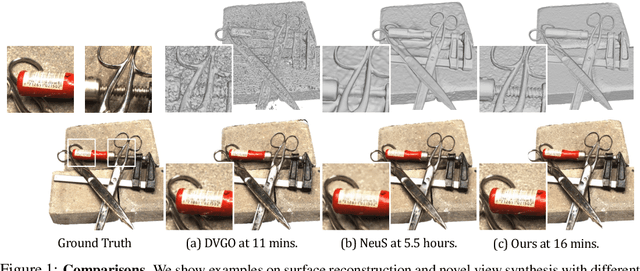
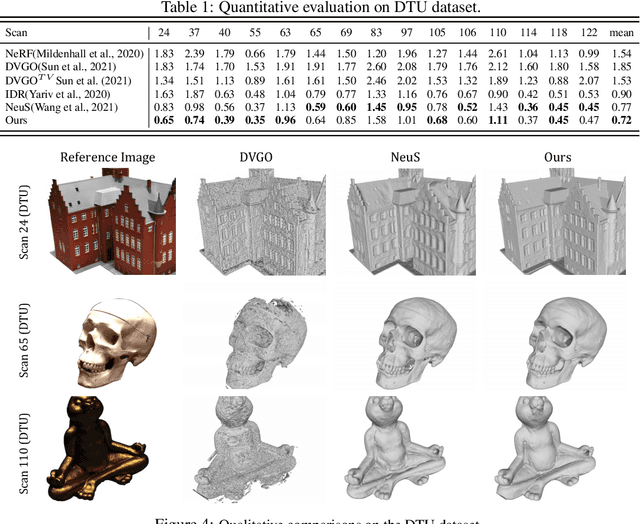
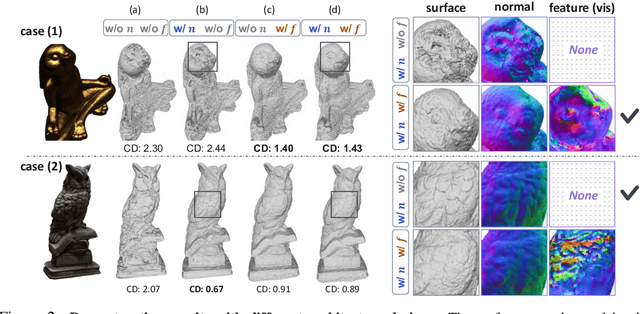
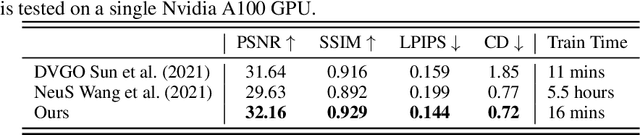
Neural surface reconstruction aims to reconstruct accurate 3D surfaces based on multi-view images. Previous methods based on neural volume rendering mostly train a fully implicit model, and they require hours of training for a single scene. Recent efforts explore the explicit volumetric representation, which substantially accelerates the optimization process by memorizing significant information in learnable voxel grids. However, these voxel-based methods often struggle in reconstructing fine-grained geometry. Through empirical studies, we found that high-quality surface reconstruction hinges on two key factors: the capability of constructing a coherent shape and the precise modeling of color-geometry dependency. In particular, the latter is the key to the accurate reconstruction of fine details. Inspired by these findings, we develop Voxurf, a voxel-based approach for efficient and accurate neural surface reconstruction, which consists of two stages: 1) leverage a learnable feature grid to construct the color field and obtain a coherent coarse shape, and 2) refine detailed geometry with a dual color network that captures precise color-geometry dependency. We further introduce a hierarchical geometry feature to enable information sharing across voxels. Our experiments show that Voxurf achieves high efficiency and high quality at the same time. On the DTU benchmark, Voxurf achieves higher reconstruction quality compared to state-of-the-art methods, with 20x speedup in training.
Nonparametric Factor Trajectory Learning for Dynamic Tensor Decomposition
Jul 06, 2022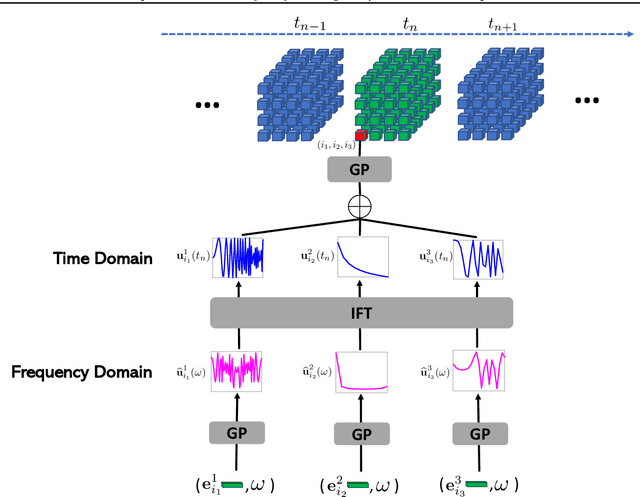
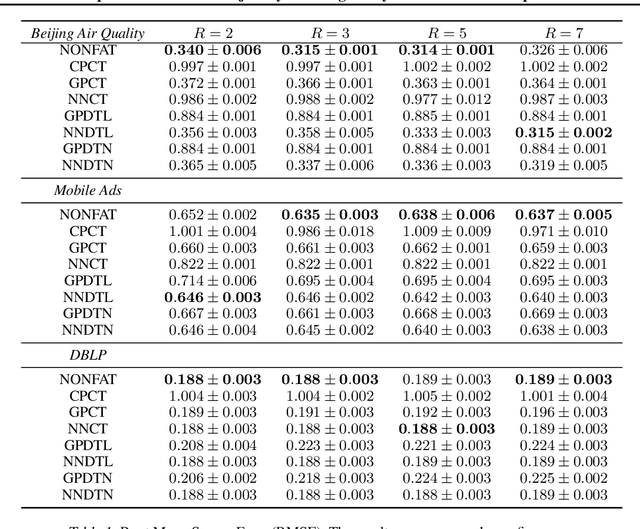
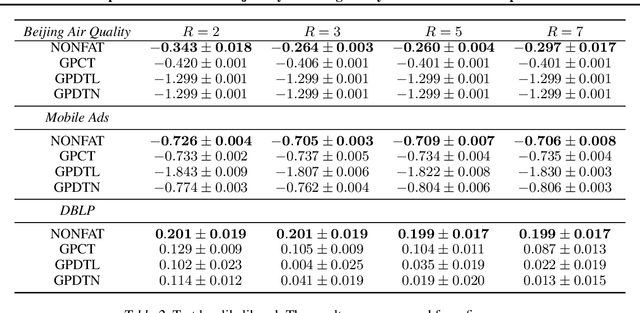
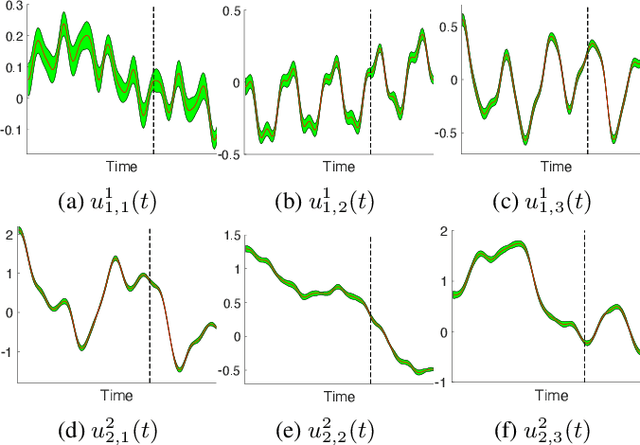
Tensor decomposition is a fundamental framework to analyze data that can be represented by multi-dimensional arrays. In practice, tensor data is often accompanied by temporal information, namely the time points when the entry values were generated. This information implies abundant, complex temporal variation patterns. However, current methods always assume the factor representations of the entities in each tensor mode are static, and never consider their temporal evolution. To fill this gap, we propose NONparametric FActor Trajectory learning for dynamic tensor decomposition (NONFAT). We place Gaussian process (GP) priors in the frequency domain and conduct inverse Fourier transform via Gauss-Laguerre quadrature to sample the trajectory functions. In this way, we can overcome data sparsity and obtain robust trajectory estimates across long time horizons. Given the trajectory values at specific time points, we use a second-level GP to sample the entry values and to capture the temporal relationship between the entities. For efficient and scalable inference, we leverage the matrix Gaussian structure in the model, introduce a matrix Gaussian posterior, and develop a nested sparse variational learning algorithm. We have shown the advantage of our method in several real-world applications.
Exploring the Impact of Temporal Bias in Point-of-Interest Recommendation
Jul 23, 2022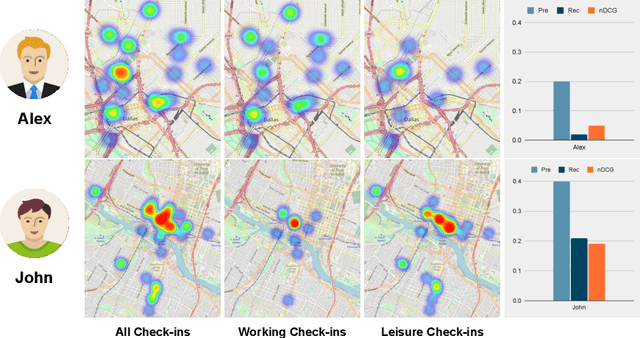


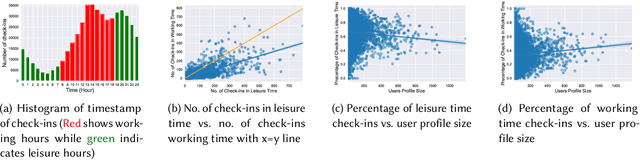
Recommending appropriate travel destinations to consumers based on contextual information such as their check-in time and location is a primary objective of Point-of-Interest (POI) recommender systems. However, the issue of contextual bias (i.e., how much consumers prefer one situation over another) has received little attention from the research community. This paper examines the effect of temporal bias, defined as the difference between users' check-in hours, leisure vs.~work hours, on the consumer-side fairness of context-aware recommendation algorithms. We believe that eliminating this type of temporal (and geographical) bias might contribute to a drop in traffic-related air pollution, noting that rush-hour traffic may be more congested. To surface effective POI recommendations, we evaluated the sensitivity of state-of-the-art context-aware models to the temporal bias contained in users' check-in activities on two POI datasets, namely Gowalla and Yelp. The findings show that the examined context-aware recommendation models prefer one group of users over another based on the time of check-in and that this preference persists even when users have the same amount of interactions.