 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Learning Large-Time-Step Molecular Dynamics with Graph Neural Networks
Nov 30, 2021
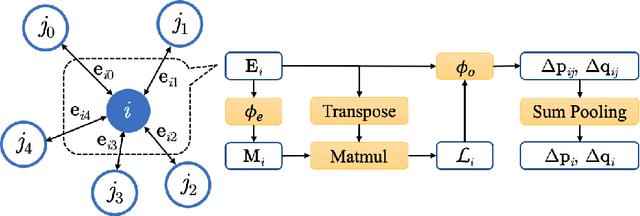
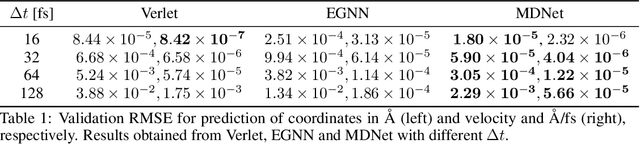
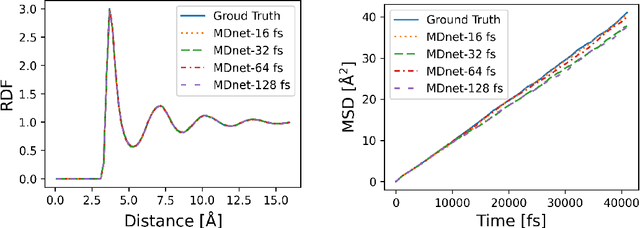
Molecular dynamics (MD) simulation predicts the trajectory of atoms by solving Newton's equation of motion with a numeric integrator. Due to physical constraints, the time step of the integrator need to be small to maintain sufficient precision. This limits the efficiency of simulation. To this end, we introduce a graph neural network (GNN) based model, MDNet, to predict the evolution of coordinates and momentum with large time steps. In addition, MDNet can easily scale to a larger system, due to its linear complexity with respect to the system size. We demonstrate the performance of MDNet on a 4000-atom system with large time steps, and show that MDNet can predict good equilibrium and transport properties, well aligned with standard MD simulations.
Passive Non-line-of-sight Imaging for Moving Targets with an Event Camera
Sep 27, 2022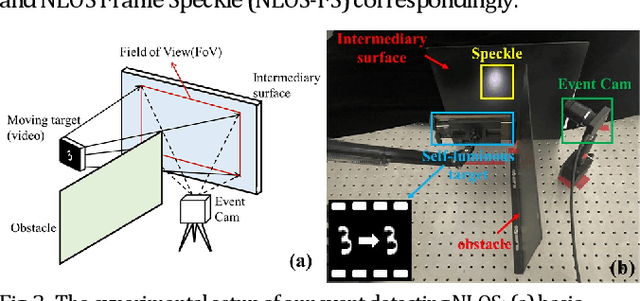
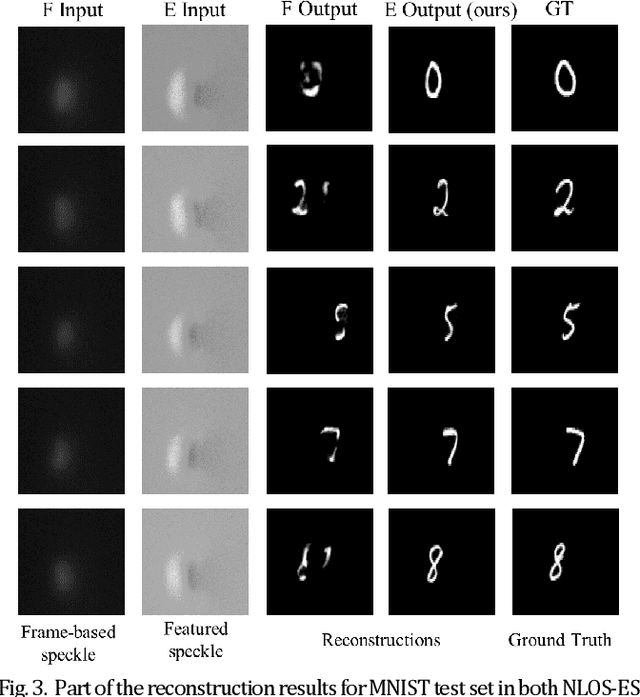
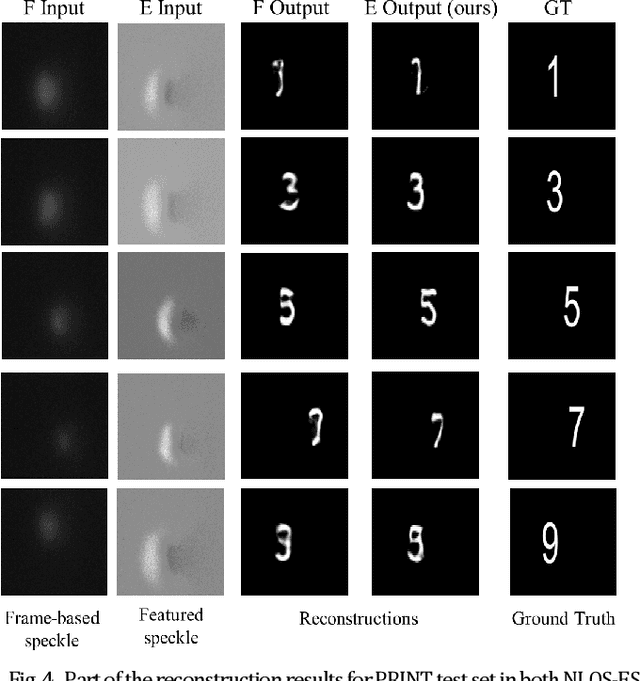
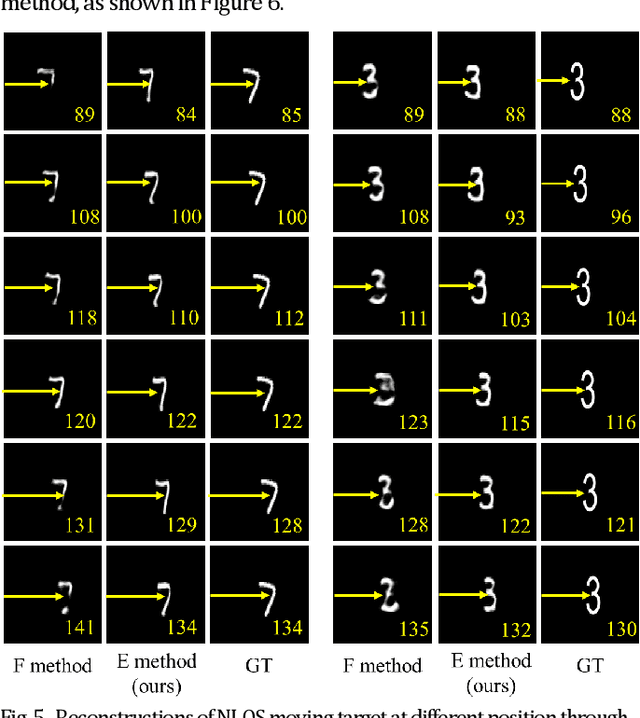
Non-line-of-sight (NLOS) imaging is an emerging technique for detecting objects behind obstacles or around corners. Recent studies on passive NLOS mainly focus on steady-state measurement and reconstruction methods, which show limitations in recognition of moving targets. To the best of our knowledge, we propose a novel event-based passive NLOS imaging method. We acquire asynchronous event-based data which contains detailed dynamic information of the NLOS target, and efficiently ease the degradation of speckle caused by movement. Besides, we create the first event-based NLOS imaging dataset, NLOS-ES, and the event-based feature is extracted by time-surface representation. We compare the reconstructions through event-based data with frame-based data. The event-based method performs well on PSNR and LPIPS, which is 20% and 10% better than frame-based method, while the data volume takes only 2% of traditional method.
Sliding-Window Normalization to Improve the Performance of Machine-Learning Models for Real-Time Motion Prediction Using Electromyography
May 19, 2022
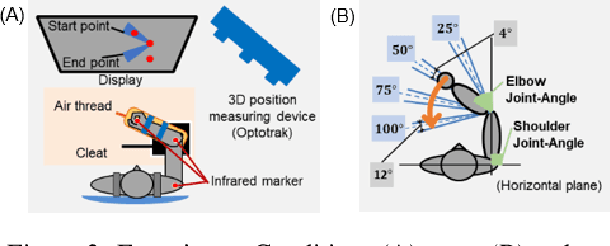
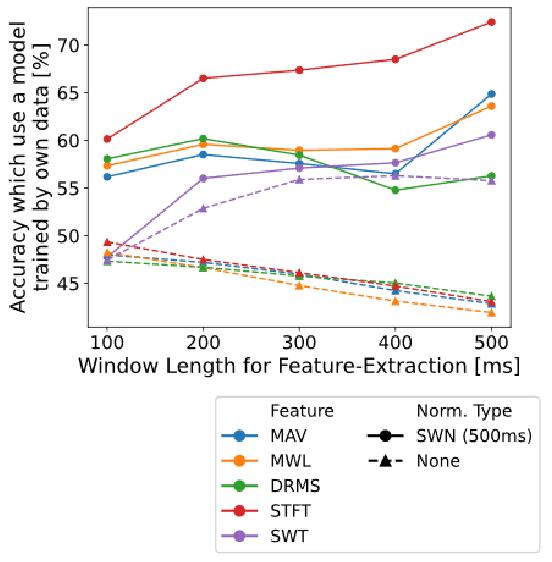
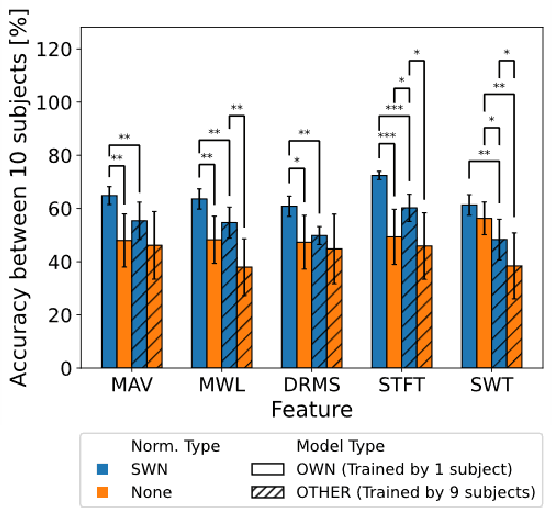
Many researchers have used machine learning models to control artificial hands, walking aids, assistance suits, etc., using the biological signal of electromyography (EMG). The use of such devices requires high classification accuracy of machine learning models. One method for improving the classification performance of machine learning models is normalization, such as z-score. However, normalization is not used in most EMG-based motion prediction studies, because of the need for calibration and fluctuation of reference value for calibration (cannot re-use). Therefore, in this study, we proposed a normalization method that combines sliding-window analysis and z-score normalization, that can be implemented in real-time processing without need for calibration. The effectiveness of this normalization method was confirmed by conducting a single-joint movement experiment of the elbow and predicting its rest, flexion, and extension movements from the EMG signal. The proposed normalization method achieved a mean accuracy of 64.6%, an improvement of 15.0% compared to the non-normalization case (mean of 49.8%). Furthermore, to improve practical applications, recent research has focused on reducing the user data required for model learning and improving classification performance in models learned from other people's data. Therefore, we investigated the classification performance of the model learned from other's data. Results showed a mean accuracy of 56.5% when the proposed method was applied, an improvement of 11.1% compared to the non-normalization case (mean of 44.1%). These two results showed the effectiveness of the simple and easy-to-implement method, and that the classification performance of the machine learning model could be improved.
Lidar SLAM for Autonomous Driving Vehicles
Aug 25, 2022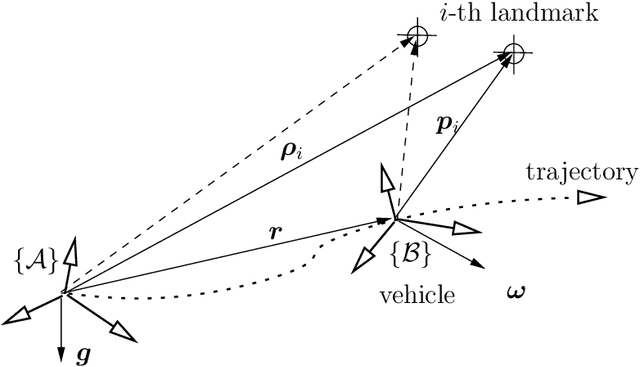
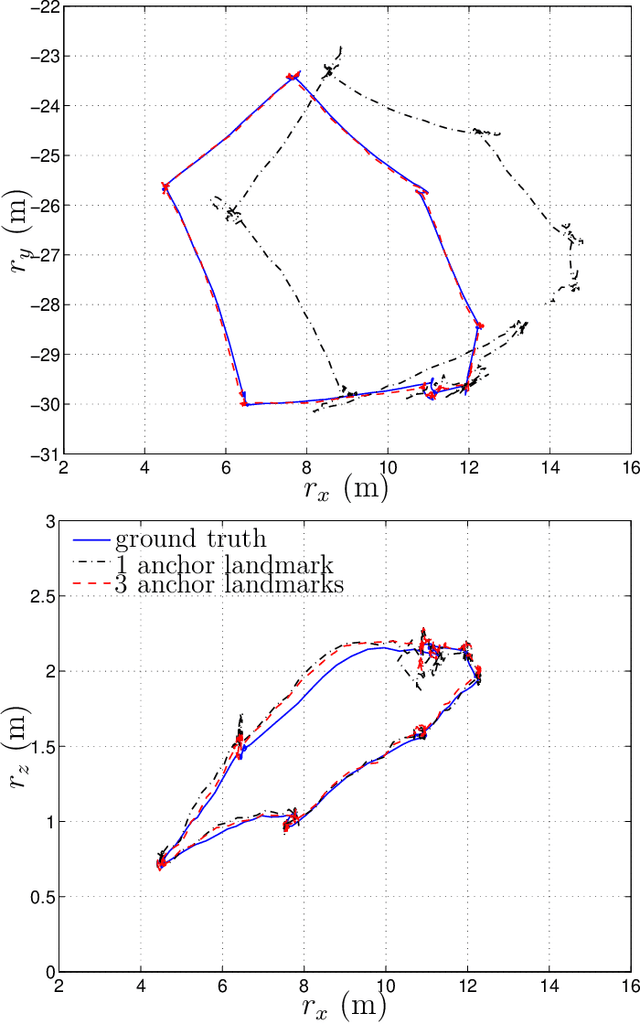
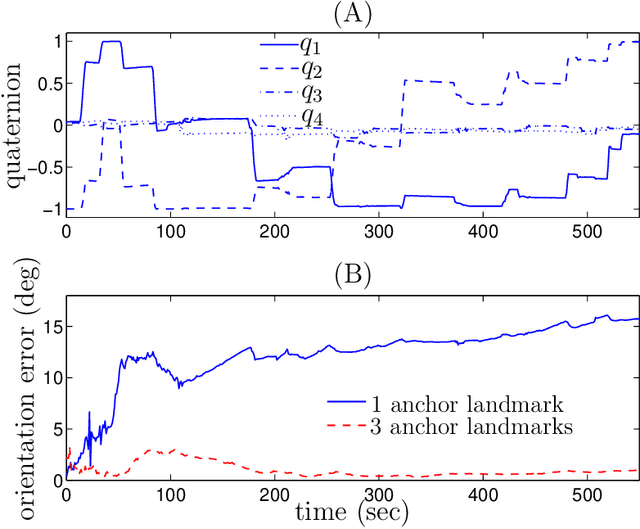
This paper presents Lidar-based Simultaneous Localization and Mapping (SLAM) for autonomous driving vehicles. Fusing data from landmark sensors and a strap-down Inertial Measurement Unit (IMU) in an adaptive Kalman filter (KF) plus the observability of the system are investigated. In addition to the vehicle's states and landmark positions, a self-tuning filter estimates the IMU calibration parameters as well as the covariance of the measurement noise. The discrete-time covariance matrix of the process noise, the state transition matrix, and the observation sensitivity matrix are derived in closed-form making them suitable for real-time implementation. Examining the observability of the 3D SLAM system leads to the conclusion that the system remains observable upon a geometrical condition on the alignment of the landmarks.
Spatio-Temporal Action Detection Under Large Motion
Sep 06, 2022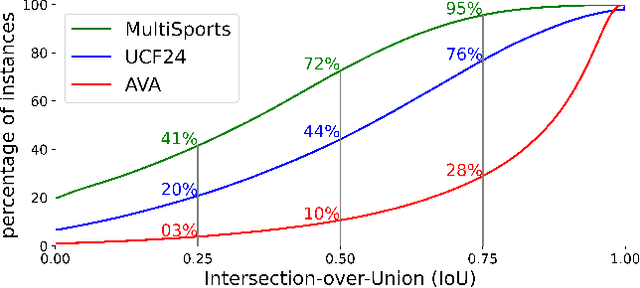
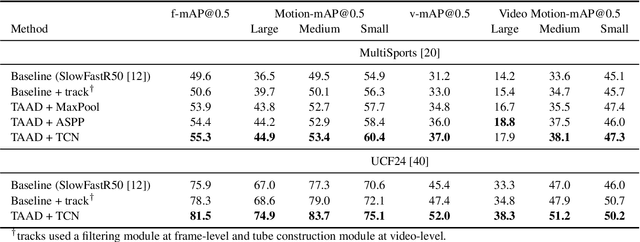
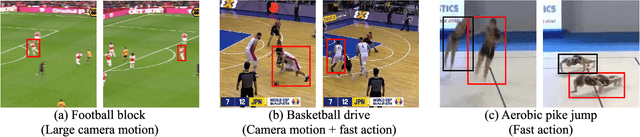
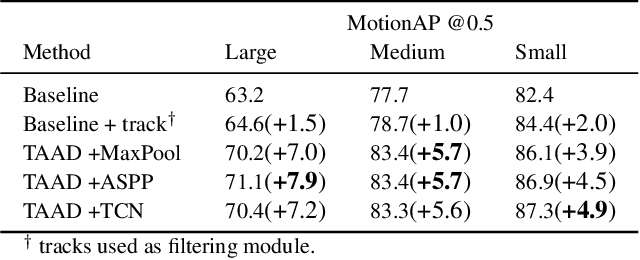
Current methods for spatiotemporal action tube detection often extend a bounding box proposal at a given keyframe into a 3D temporal cuboid and pool features from nearby frames. However, such pooling fails to accumulate meaningful spatiotemporal features if the position or shape of the actor shows large 2D motion and variability through the frames, due to large camera motion, large actor shape deformation, fast actor action and so on. In this work, we aim to study the performance of cuboid-aware feature aggregation in action detection under large action. Further, we propose to enhance actor feature representation under large motion by tracking actors and performing temporal feature aggregation along the respective tracks. We define the actor motion with intersection-over-union (IoU) between the boxes of action tubes/tracks at various fixed time scales. The action having a large motion would result in lower IoU over time, and slower actions would maintain higher IoU. We find that track-aware feature aggregation consistently achieves a large improvement in action detection performance, especially for actions under large motion compared to the cuboid-aware baseline. As a result, we also report state-of-the-art on the large-scale MultiSports dataset.
GeONet: a neural operator for learning the Wasserstein geodesic
Sep 28, 2022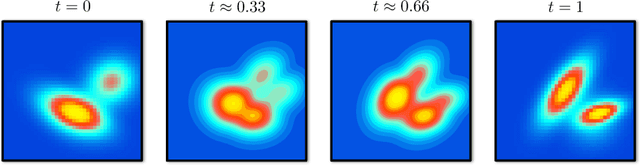

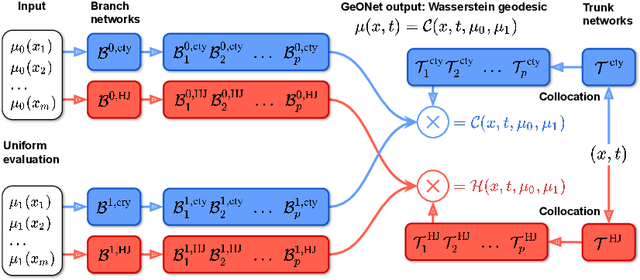
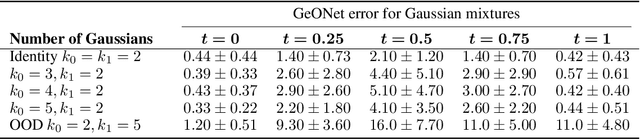
Optimal transport (OT) offers a versatile framework to compare complex data distributions in a geometrically meaningful way. Traditional methods for computing the Wasserstein distance and geodesic between probability measures require mesh-dependent domain discretization and suffer from the curse-of-dimensionality. We present GeONet, a mesh-invariant deep neural operator network that learns the non-linear mapping from the input pair of initial and terminal distributions to the Wasserstein geodesic connecting the two endpoint distributions. In the offline training stage, GeONet learns the saddle point optimality conditions for the dynamic formulation of the OT problem in the primal and dual spaces that are characterized by a coupled PDE system. The subsequent inference stage is instantaneous and can be deployed for real-time predictions in the online learning setting. We demonstrate that GeONet achieves comparable testing accuracy to the standard OT solvers on a simulation example and the CIFAR-10 dataset with considerably reduced inference-stage computational cost by orders of magnitude.
Learning Automata-Based Complex Event Patterns in Answer Set Programming
Aug 31, 2022
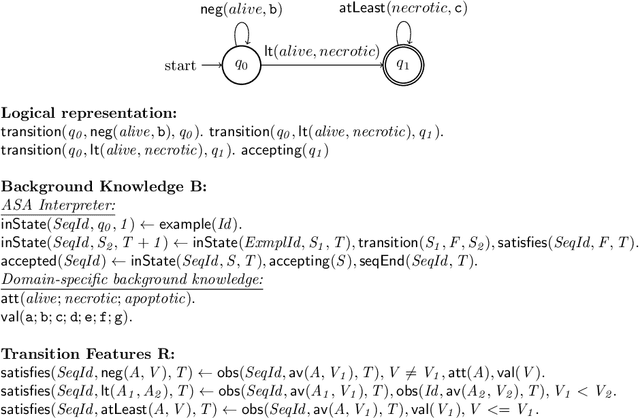
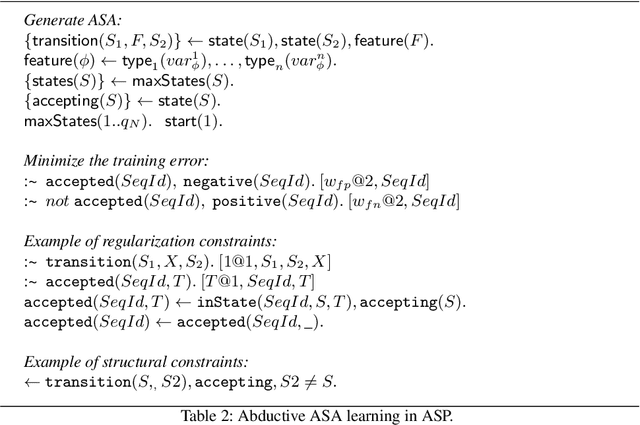
Complex Event Recognition and Forecasting (CER/F) techniques attempt to detect, or even forecast ahead of time, event occurrences in streaming input using predefined event patterns. Such patterns are not always known in advance, or they frequently change over time, making machine learning techniques, capable of extracting such patterns from data, highly desirable in CER/F. Since many CER/F systems use symbolic automata to represent such patterns, we propose a family of such automata where the transition-enabling conditions are defined by Answer Set Programming (ASP) rules, and which, thanks to the strong connections of ASP to symbolic learning, are directly learnable from data. We present such a learning approach in ASP and an incremental version thereof that trades optimality for efficiency and is capable to scale to large datasets. We evaluate our approach on two CER datasets and compare it to state-of-the-art automata learning techniques, demonstrating empirically a superior performance, both in terms of predictive accuracy and scalability.
DMCA: Dense Multi-agent Navigation using Attention and Communication
Sep 28, 2022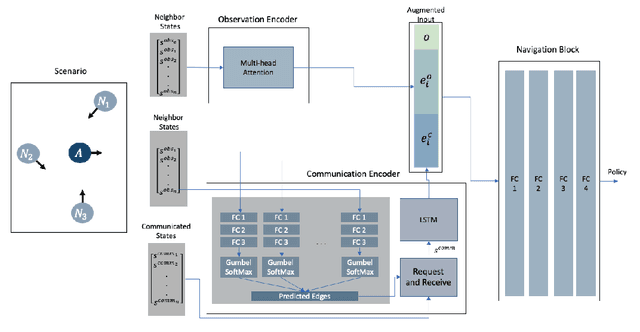
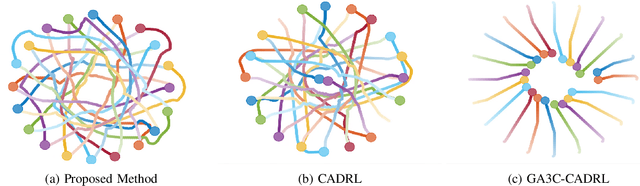
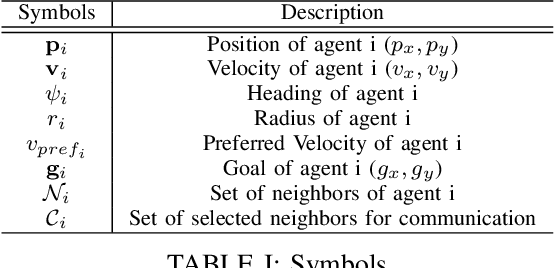

In decentralized multi-robot navigation, the agents lack the world knowledge to make safe and (near-)optimal plans reliably and make their decisions on their neighbors' observable states. We present a reinforcement learning based multi-agent navigation algorithm that performs inter-agent communications. In order to deal with the variable number of neighbors for each agent, we use a multi-head self-attention mechanism to encode neighbor information and create a fixed-length observation vector. We pose communication selection as a link prediction problem, where the network predicts whether communication is necessary given the observable information. The communicated information augments the observed neighbor information and is used to select a suitable navigation plan. We highlight the benefits of our approach by performing safe and efficient navigation among multiple robots in dense and challenging benchmarks. We also compare the performance with other learning-based methods and highlight improvements in terms of fewer collisions and time-to-goal in dense scenarios.
Estimation of Soiling Losses in Unlabeled PV Data
Sep 20, 2022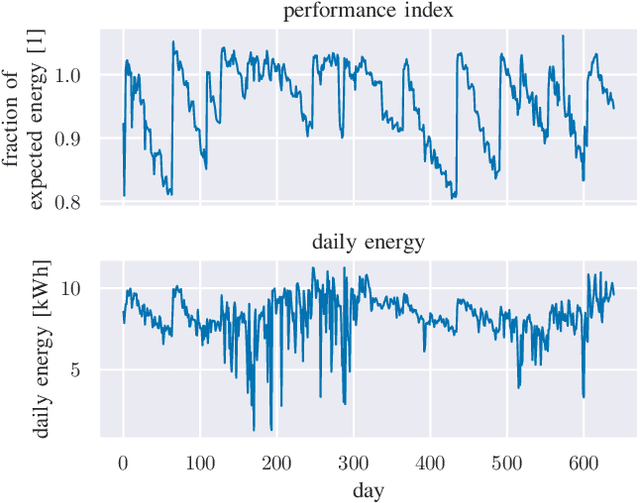
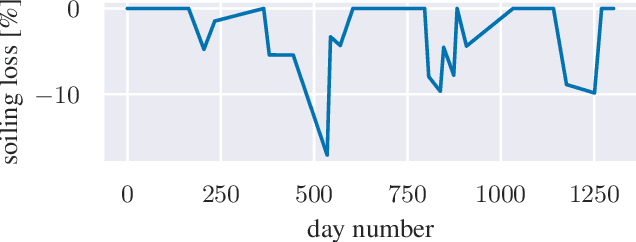
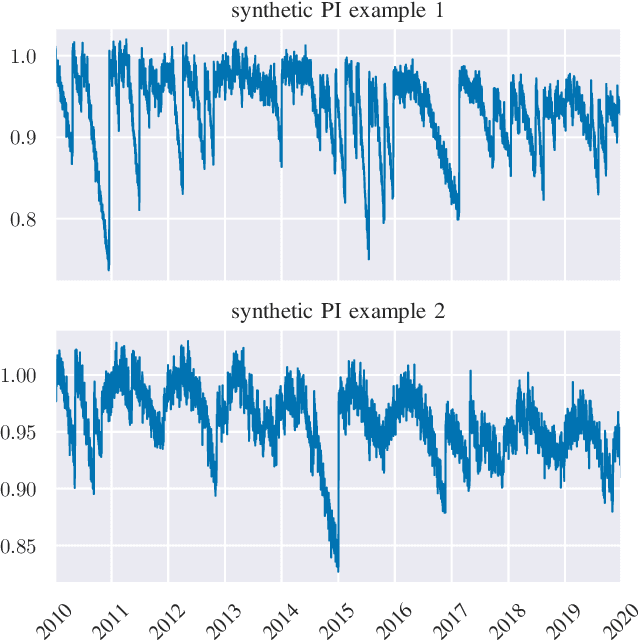
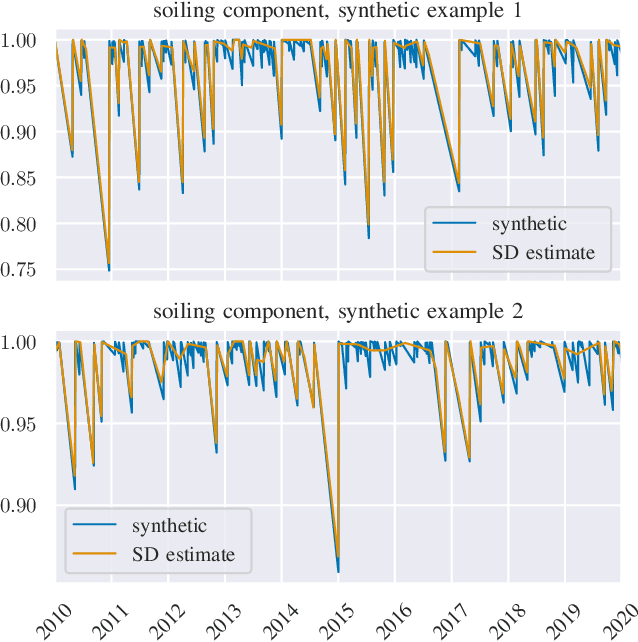
We provide a methodology for estimating the losses due to soiling for photovoltaic (PV) systems. We focus this work on estimating the losses from historical power production data that are unlabeled, i.e. power measurements with time stamps, but no other information such as site configuration or meteorological data. We present a validation of this approach on a small fleet of typical rooftop PV systems. The proposed method differs from prior work in that the construction of a performance index is not required to analyze soiling loss. This approach is appropriate for analyzing the soiling losses in field production data from fleets of distributed rooftop systems and is highly automatic, allowing for scaling to large fleets of heterogeneous PV systems.
A Nonparametric Contextual Bandit with Arm-level Eligibility Control for Customer Service Routing
Sep 08, 2022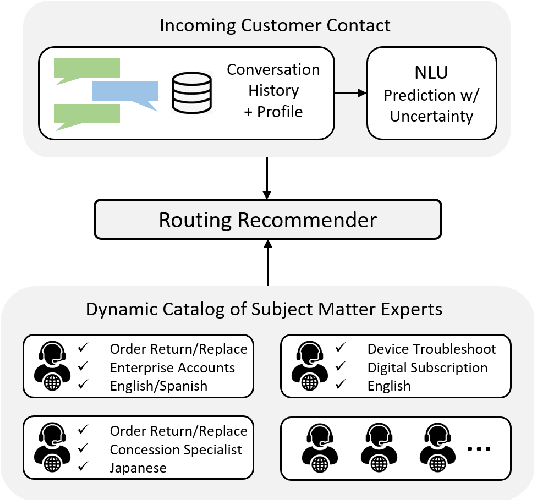
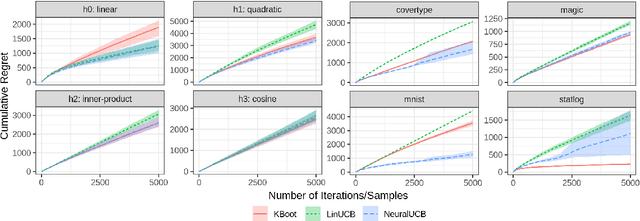
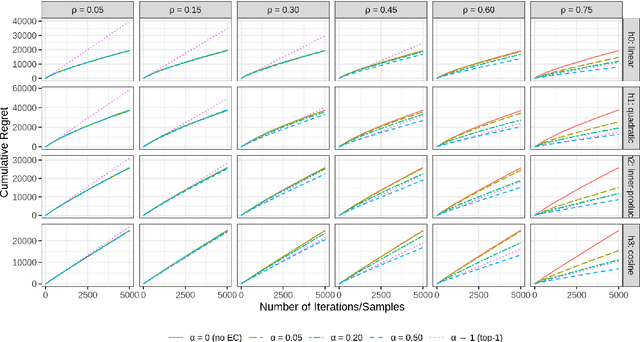
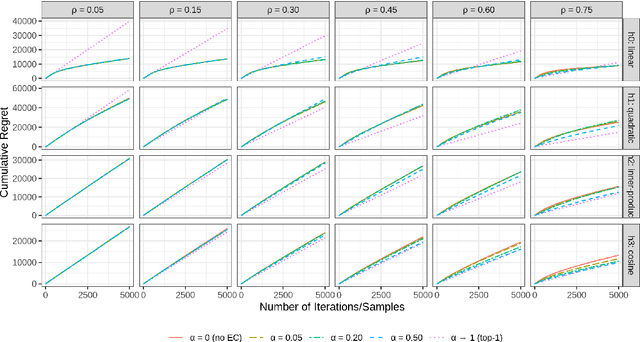
Amazon Customer Service provides real-time support for millions of customer contacts every year. While bot-resolver helps automate some traffic, we still see high demand for human agents, also called subject matter experts (SMEs). Customers outreach with questions in different domains (return policy, device troubleshooting, etc.). Depending on their training, not all SMEs are eligible to handle all contacts. Routing contacts to eligible SMEs turns out to be a non-trivial problem because SMEs' domain eligibility is subject to training quality and can change over time. To optimally recommend SMEs while simultaneously learning the true eligibility status, we propose to formulate the routing problem with a nonparametric contextual bandit algorithm (K-Boot) plus an eligibility control (EC) algorithm. K-Boot models reward with a kernel smoother on similar past samples selected by $k$-NN, and Bootstrap Thompson Sampling for exploration. EC filters arms (SMEs) by the initially system-claimed eligibility and dynamically validates the reliability of this information. The proposed K-Boot is a general bandit algorithm, and EC is applicable to other bandits. Our simulation studies show that K-Boot performs on par with state-of-the-art Bandit models, and EC boosts K-Boot performance when stochastic eligibility signal exists.