 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Bit-Line Computing for CNN Accelerators Co-Design in Edge AI Inference
Sep 12, 2022
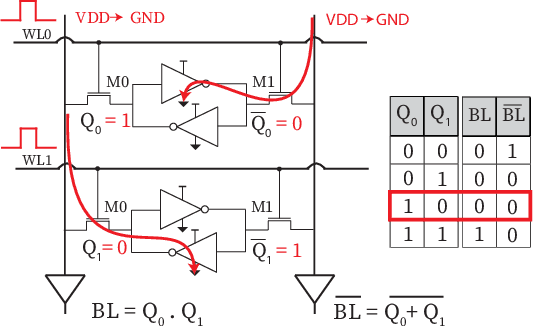
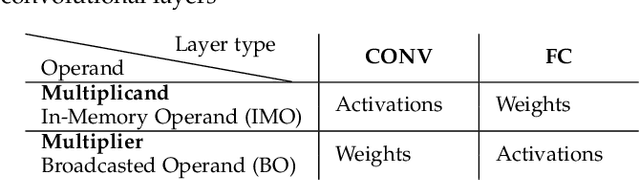
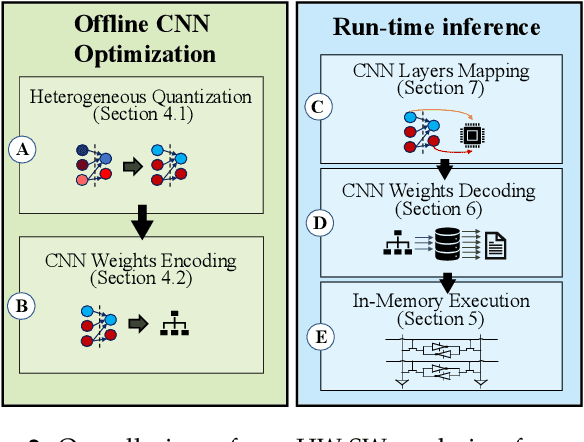
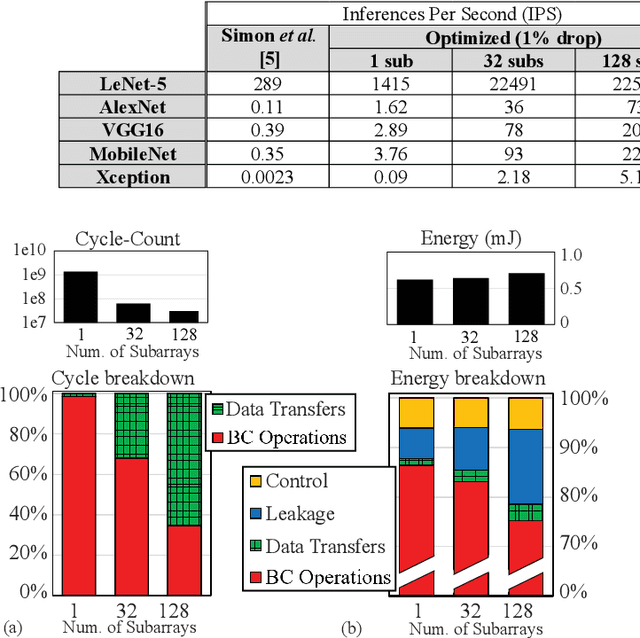
By supporting the access of multiple memory words at the same time, Bit-line Computing (BC) architectures allow the parallel execution of bit-wise operations in-memory. At the array periphery, arithmetic operations are then derived with little additional overhead. Such a paradigm opens novel opportunities for Artificial Intelligence (AI) at the edge, thanks to the massive parallelism inherent in memory arrays and the extreme energy efficiency of computing in-situ, hence avoiding data transfers. Previous works have shown that BC brings disruptive efficiency gains when targeting AI workloads, a key metric in the context of emerging edge AI scenarios. This manuscript builds on these findings by proposing an end-to-end framework that leverages BC-specific optimizations to enable high parallelism and aggressive compression of AI models. Our approach is supported by a novel hardware module performing real-time decoding, as well as new algorithms to enable BC-friendly model compression. Our hardware/software approach results in a 91% energy savings (for a 1% accuracy degradation constraint) regarding state-of-the-art BC computing approaches.
Reinforcement Learning in Time-Varying Systems: an Empirical Study
Jan 14, 2022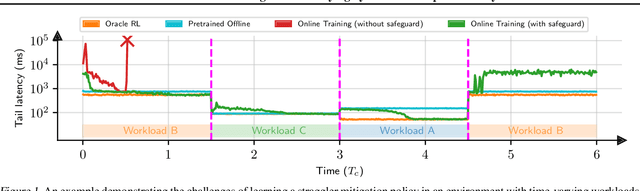
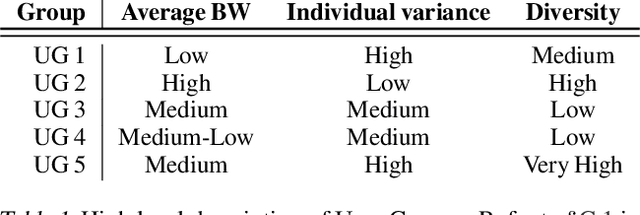
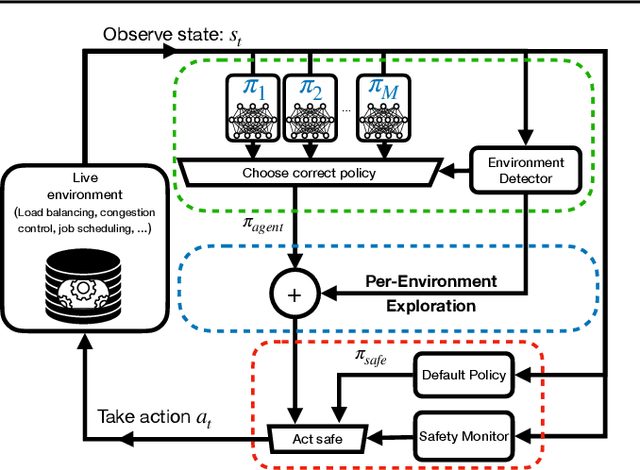
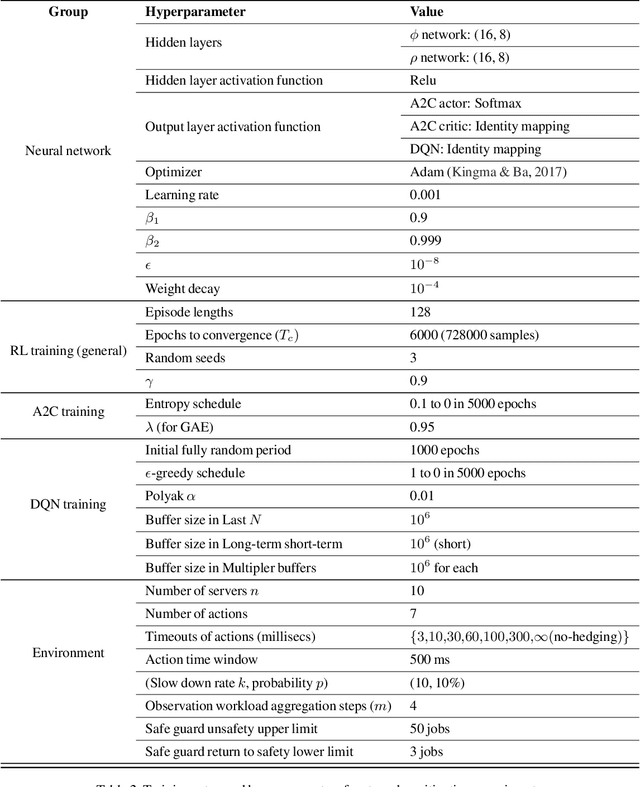
Recent research has turned to Reinforcement Learning (RL) to solve challenging decision problems, as an alternative to hand-tuned heuristics. RL can learn good policies without the need for modeling the environment's dynamics. Despite this promise, RL remains an impractical solution for many real-world systems problems. A particularly challenging case occurs when the environment changes over time, i.e. it exhibits non-stationarity. In this work, we characterize the challenges introduced by non-stationarity and develop a framework for addressing them to train RL agents in live systems. Such agents must explore and learn new environments, without hurting the system's performance, and remember them over time. To this end, our framework (1) identifies different environments encountered by the live system, (2) explores and trains a separate expert policy for each environment, and (3) employs safeguards to protect the system's performance. We apply our framework to two systems problems: straggler mitigation and adaptive video streaming, and evaluate it against a variety of alternative approaches using real-world and synthetic data. We show that each component of our framework is necessary to cope with non-stationarity.
Over-the-Air Gaussian Process Regression Based on Product of Experts
Oct 06, 2022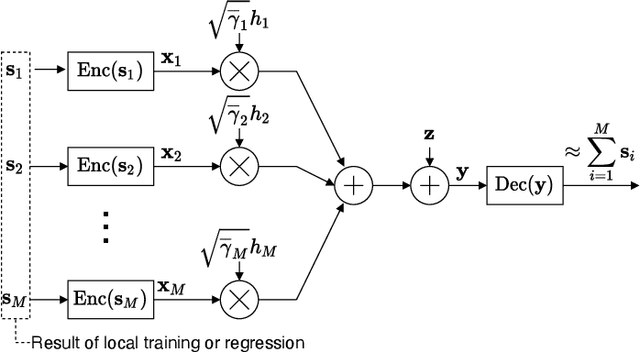
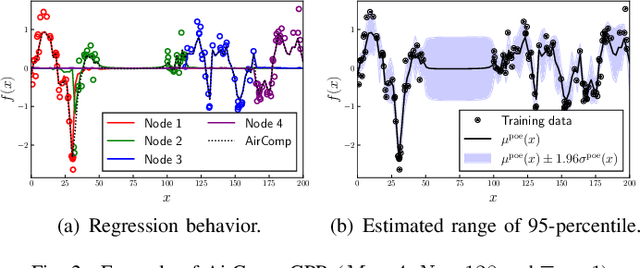
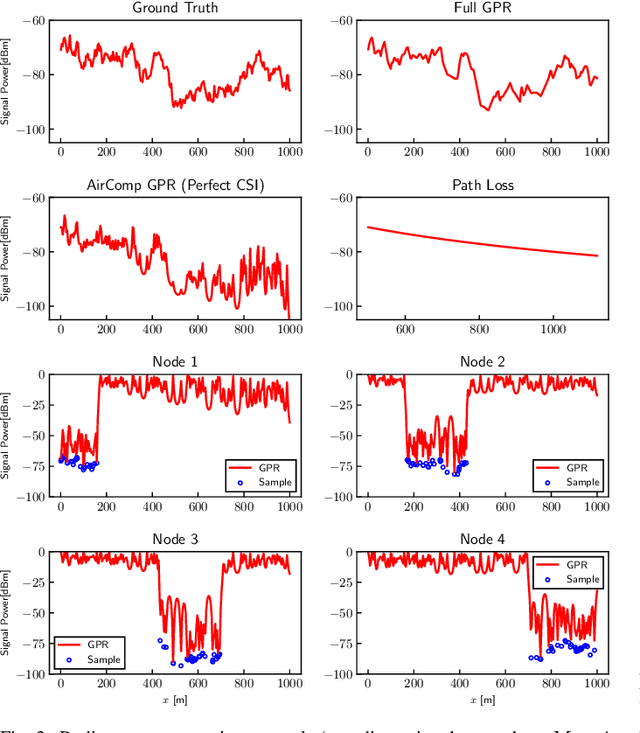
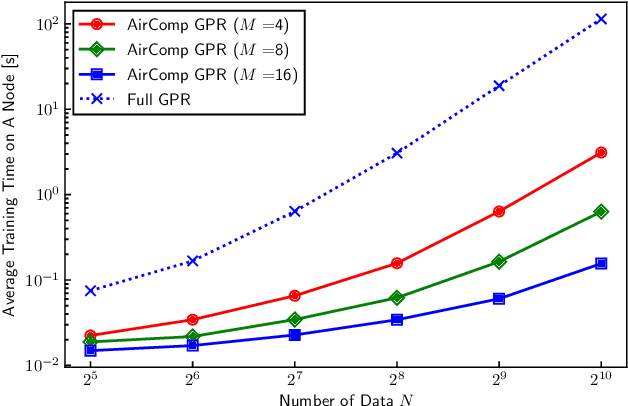
This paper proposes a distributed Gaussian process regression (GPR) with over-the-air computation, termed AirComp GPR, for communication- and computation-efficient data analysis over wireless networks. GPR is a non-parametric regression method that can model the target flexibly. However, its computational complexity and communication efficiency tend to be significant as the number of data increases. AirComp GPR focuses on that product-of-experts-based GPR approximates the exact GPR by a sum of values reported from distributed nodes. We introduce AirComp for the training and prediction steps to allow the nodes to transmit their local computation results simultaneously; the communication strategies are presented, including distributed training based on perfect and statistical channel state information cases. Applying to a radio map construction task, we demonstrate that AirComp GPR speeds up the computation time while maintaining the communication cost in training constant regardless of the numbers of data and nodes.
Knowing Where to Look: A Planning-based Architecture to Automate the Gaze Behavior of Social Robots
Oct 06, 2022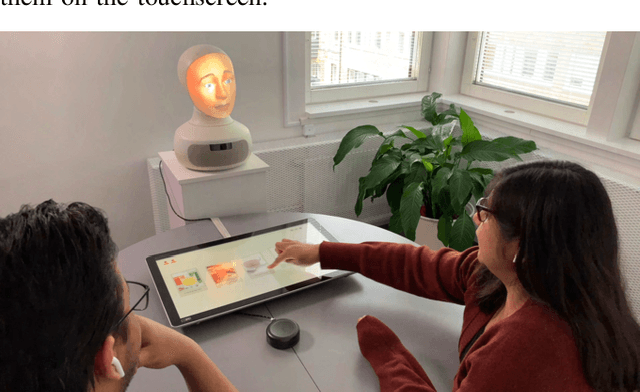
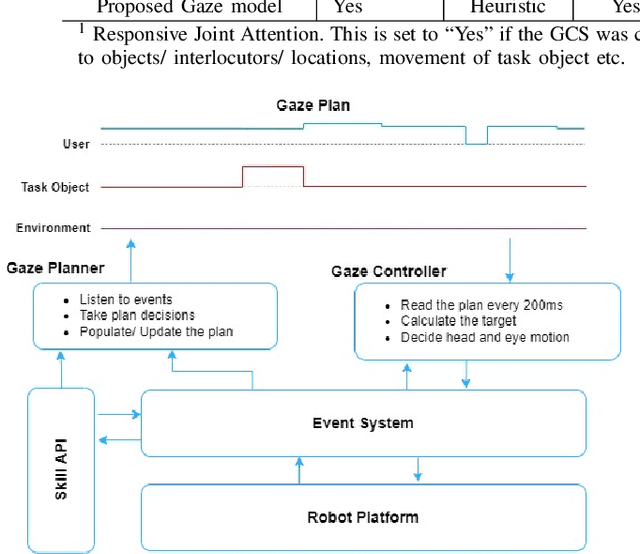
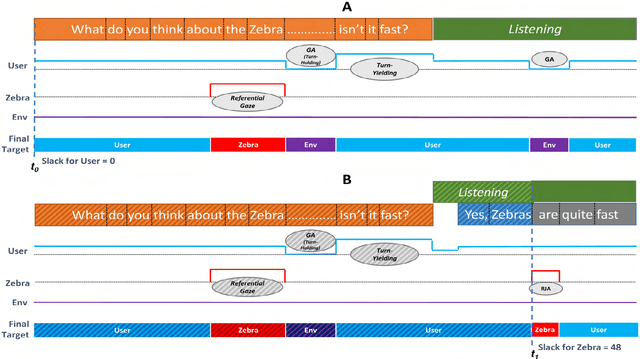
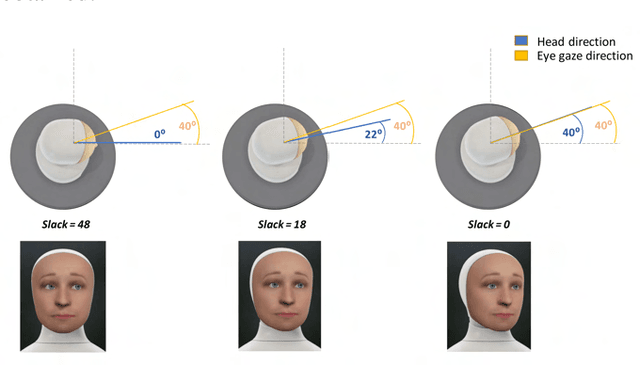
Gaze cues play an important role in human communication and are used to coordinate turn-taking and joint attention, as well as to regulate intimacy. In order to have fluent conversations with people, social robots need to exhibit human-like gaze behavior. Previous Gaze Control Systems (GCS) in HRI have automated robot gaze using data-driven or heuristic approaches. However, these systems tend to be mainly reactive in nature. Planning the robot gaze ahead of time could help in achieving more realistic gaze behavior and better eye-head coordination. In this paper, we propose and implement a novel planning-based GCS. We evaluate our system in a comparative within-subjects user study (N=26) between a reactive system and our proposed system. The results show that the users preferred the proposed system and that it was significantly more interpretable and better at regulating intimacy.
VIBUS: Data-efficient 3D Scene Parsing with VIewpoint Bottleneck and Uncertainty-Spectrum Modeling
Oct 20, 2022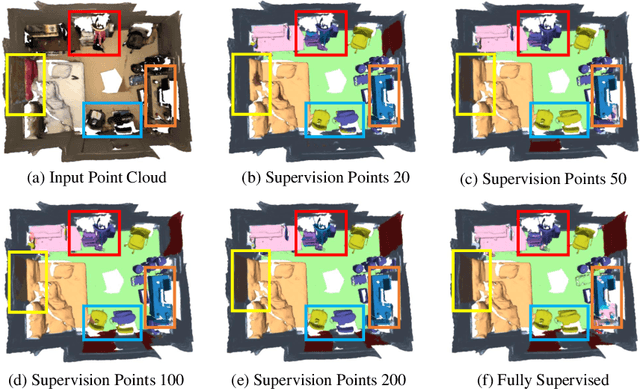
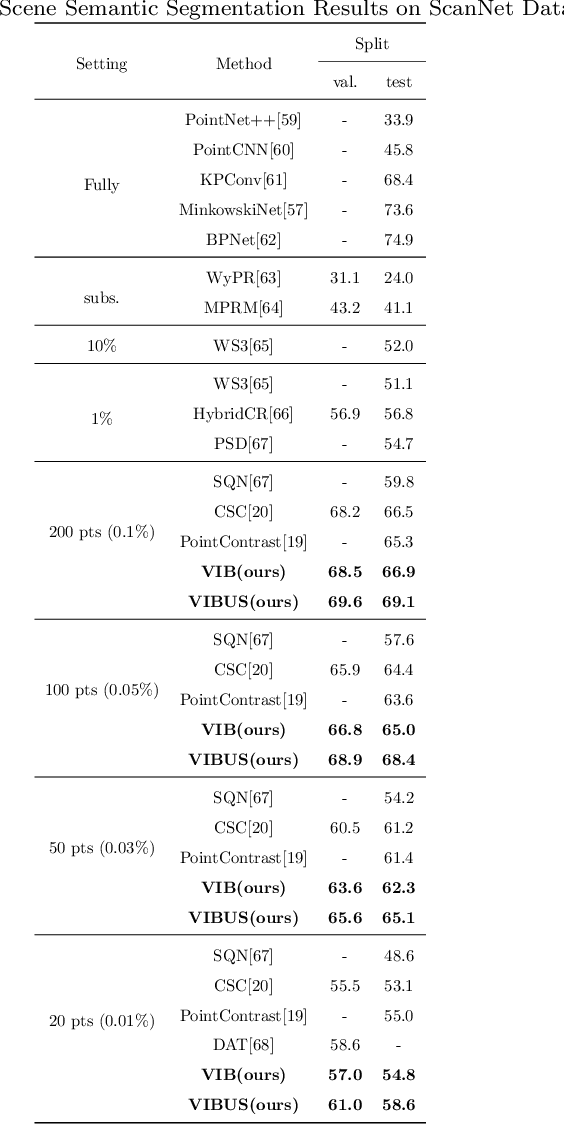
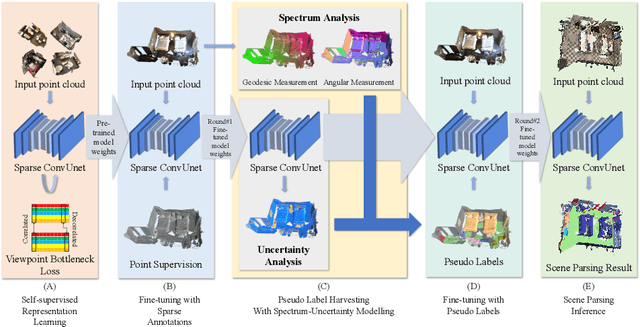
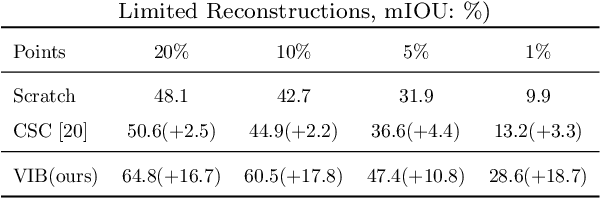
Recently, 3D scenes parsing with deep learning approaches has been a heating topic. However, current methods with fully-supervised models require manually annotated point-wise supervision which is extremely user-unfriendly and time-consuming to obtain. As such, training 3D scene parsing models with sparse supervision is an intriguing alternative. We term this task as data-efficient 3D scene parsing and propose an effective two-stage framework named VIBUS to resolve it by exploiting the enormous unlabeled points. In the first stage, we perform self-supervised representation learning on unlabeled points with the proposed Viewpoint Bottleneck loss function. The loss function is derived from an information bottleneck objective imposed on scenes under different viewpoints, making the process of representation learning free of degradation and sampling. In the second stage, pseudo labels are harvested from the sparse labels based on uncertainty-spectrum modeling. By combining data-driven uncertainty measures and 3D mesh spectrum measures (derived from normal directions and geodesic distances), a robust local affinity metric is obtained. Finite gamma/beta mixture models are used to decompose category-wise distributions of these measures, leading to automatic selection of thresholds. We evaluate VIBUS on the public benchmark ScanNet and achieve state-of-the-art results on both validation set and online test server. Ablation studies show that both Viewpoint Bottleneck and uncertainty-spectrum modeling bring significant improvements. Codes and models are publicly available at https://github.com/AIR-DISCOVER/VIBUS.
Cyclical Self-Supervision for Semi-Supervised Ejection Fraction Prediction from Echocardiogram Videos
Oct 20, 2022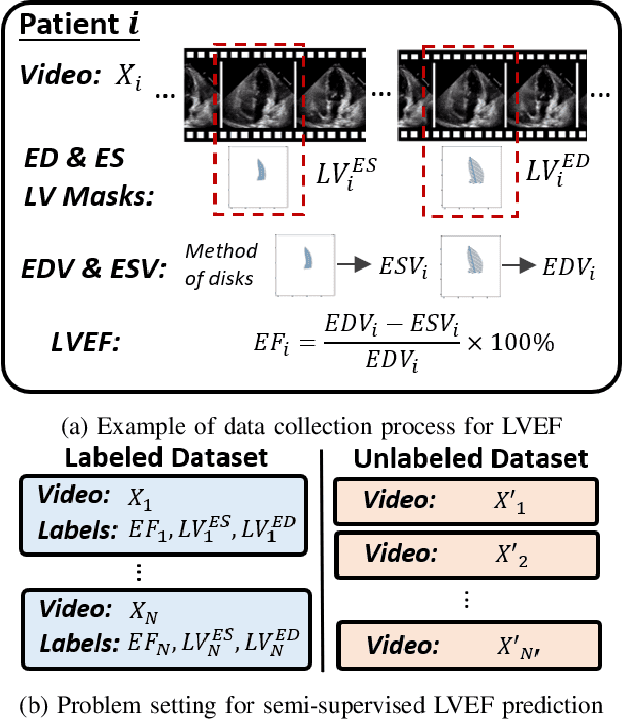
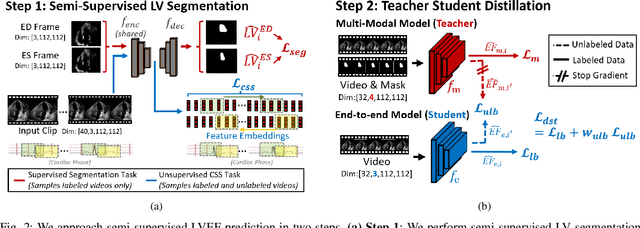
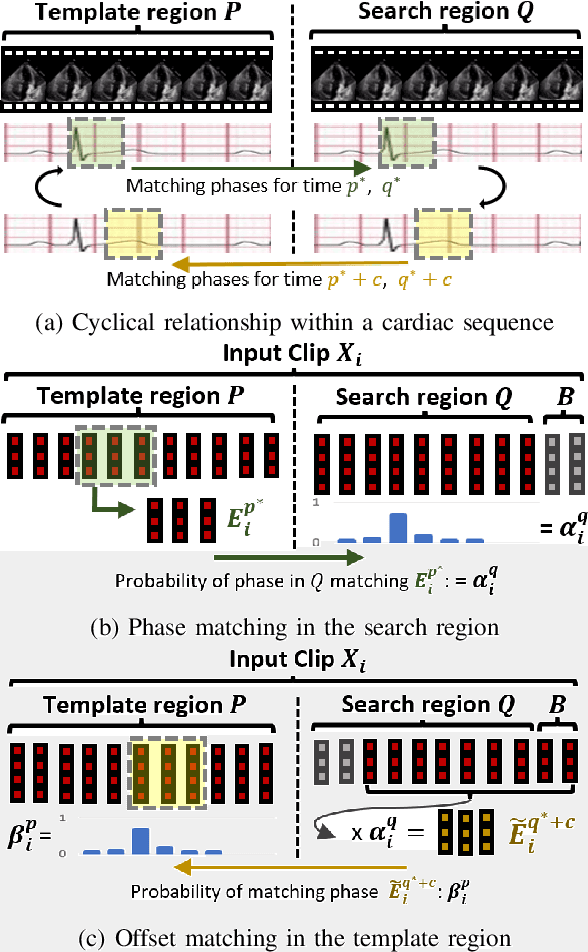
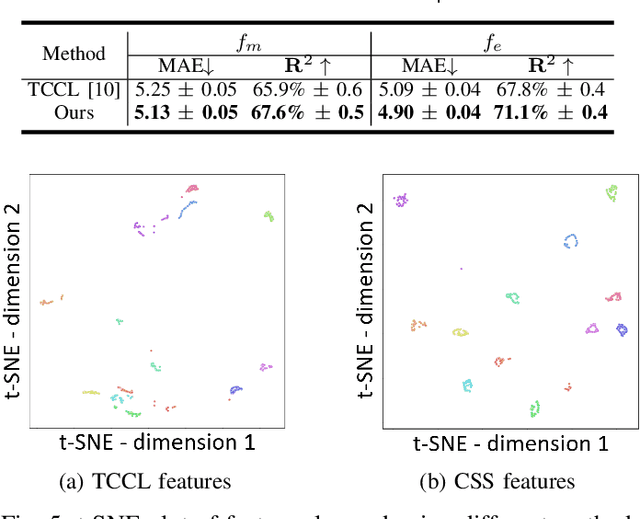
Left-ventricular ejection fraction (LVEF) is an important indicator of heart failure. Existing methods for LVEF estimation from video require large amounts of annotated data to achieve high performance, e.g. using 10,030 labeled echocardiogram videos to achieve mean absolute error (MAE) of 4.10. Labeling these videos is time-consuming however and limits potential downstream applications to other heart diseases. This paper presents the first semi-supervised approach for LVEF prediction. Unlike general video prediction tasks, LVEF prediction is specifically related to changes in the left ventricle (LV) in echocardiogram videos. By incorporating knowledge learned from predicting LV segmentations into LVEF regression, we can provide additional context to the model for better predictions. To this end, we propose a novel Cyclical Self-Supervision (CSS) method for learning video-based LV segmentation, which is motivated by the observation that the heartbeat is a cyclical process with temporal repetition. Prediction masks from our segmentation model can then be used as additional input for LVEF regression to provide spatial context for the LV region. We also introduce teacher-student distillation to distill the information from LV segmentation masks into an end-to-end LVEF regression model that only requires video inputs. Results show our method outperforms alternative semi-supervised methods and can achieve MAE of 4.17, which is competitive with state-of-the-art supervised performance, using half the number of labels. Validation on an external dataset also shows improved generalization ability from using our method.
YOWO-Plus: An Incremental Improvement
Oct 20, 2022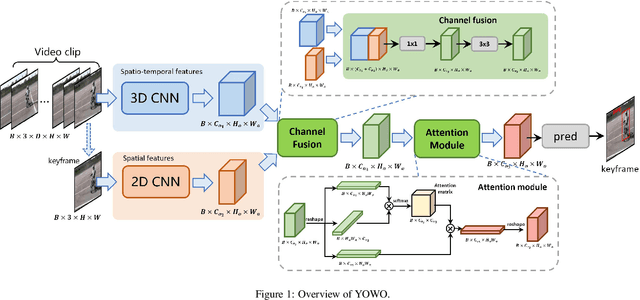
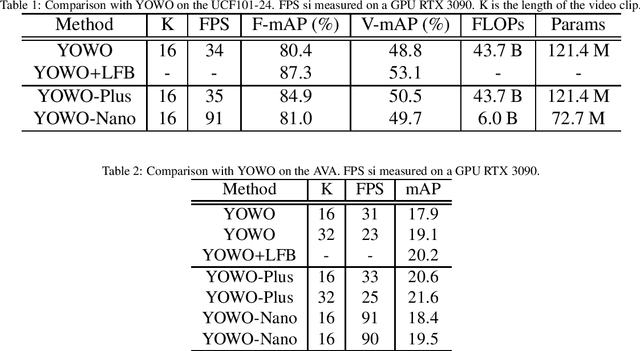
In this technical report, we would like to introduce our updates to YOWO, a real-time method for spatio-temporal action detection. We make a bunch of little design changes to make it better. For network structure, we use the same ones of official implemented YOWO, including 3D-ResNext-101 and YOLOv2, but we use a better pretrained weight of our reimplemented YOLOv2, which is better than the official YOLOv2. We also optimize the label assignment used in YOWO. To accurately detection action instances, we deploy GIoU loss for box regression. After our incremental improvement, YOWO achieves 84.9\% frame mAP and 50.5\% video mAP on the UCF101-24, significantly higher than the official YOWO. On the AVA, our optimized YOWO achieves 20.6\% frame mAP with 16 frames, also exceeding the official YOWO. With 32 frames, our YOWO achieves 21.6 frame mAP with 25 FPS on an RTX 3090 GPU. We name the optimized YOWO as YOWO-Plus. Moreover, we replace the 3D-ResNext-101 with the efficient 3D-ShuffleNet-v2 to design a lightweight action detector, YOWO-Nano. YOWO-Nano achieves 81.0 \% frame mAP and 49.7\% video frame mAP with over 90 FPS on the UCF101-24. It also achieves 18.4 \% frame mAP with about 90 FPS on the AVA. As far as we know, YOWO-Nano is the fastest state-of-the-art action detector. Our code is available on https://github.com/yjh0410/PyTorch_YOWO.
Inductive Logical Query Answering in Knowledge Graphs
Oct 13, 2022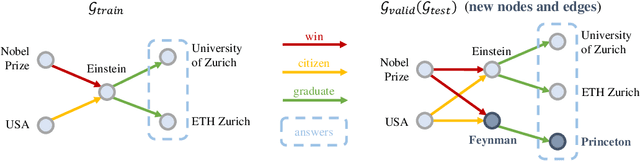
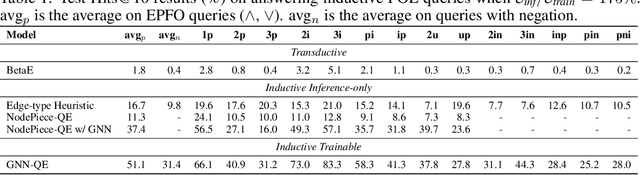
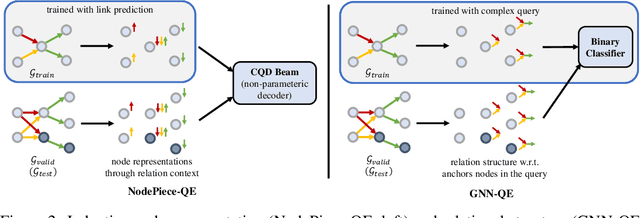

Formulating and answering logical queries is a standard communication interface for knowledge graphs (KGs). Alleviating the notorious incompleteness of real-world KGs, neural methods achieved impressive results in link prediction and complex query answering tasks by learning representations of entities, relations, and queries. Still, most existing query answering methods rely on transductive entity embeddings and cannot generalize to KGs containing new entities without retraining the entity embeddings. In this work, we study the inductive query answering task where inference is performed on a graph containing new entities with queries over both seen and unseen entities. To this end, we devise two mechanisms leveraging inductive node and relational structure representations powered by graph neural networks (GNNs). Experimentally, we show that inductive models are able to perform logical reasoning at inference time over unseen nodes generalizing to graphs up to 500% larger than training ones. Exploring the efficiency--effectiveness trade-off, we find the inductive relational structure representation method generally achieves higher performance, while the inductive node representation method is able to answer complex queries in the inference-only regime without any training on queries and scales to graphs of millions of nodes. Code is available at https://github.com/DeepGraphLearning/InductiveQE.
Self-Supervised Geometric Correspondence for Category-Level 6D Object Pose Estimation in the Wild
Oct 13, 2022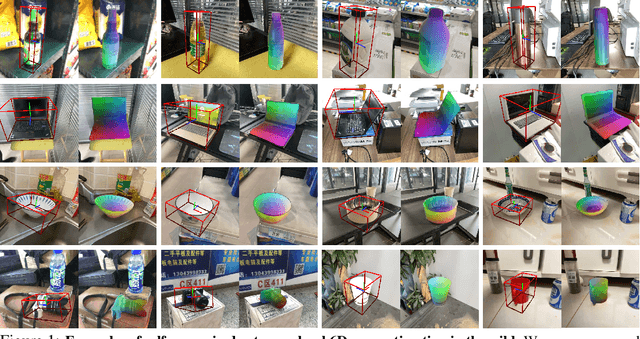
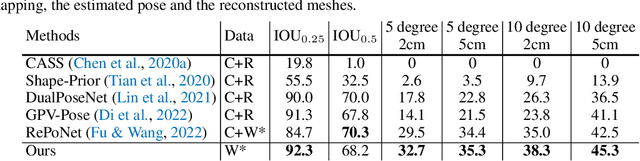
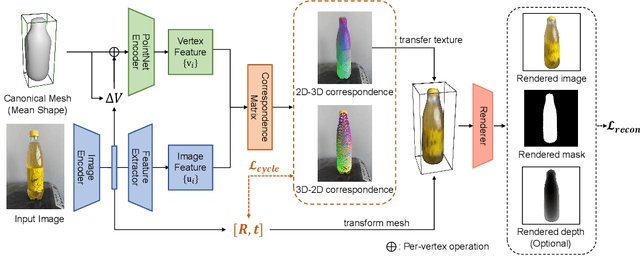
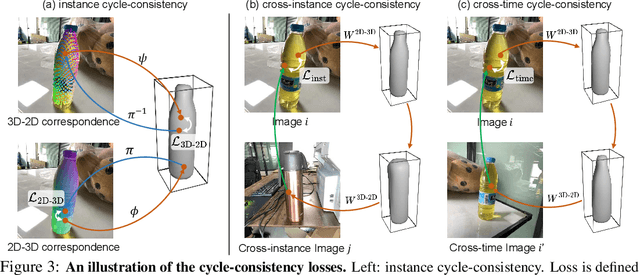
While 6D object pose estimation has wide applications across computer vision and robotics, it remains far from being solved due to the lack of annotations. The problem becomes even more challenging when moving to category-level 6D pose, which requires generalization to unseen instances. Current approaches are restricted by leveraging annotations from simulation or collected from humans. In this paper, we overcome this barrier by introducing a self-supervised learning approach trained directly on large-scale real-world object videos for category-level 6D pose estimation in the wild. Our framework reconstructs the canonical 3D shape of an object category and learns dense correspondences between input images and the canonical shape via surface embedding. For training, we propose novel geometrical cycle-consistency losses which construct cycles across 2D-3D spaces, across different instances and different time steps. The learned correspondence can be applied for 6D pose estimation and other downstream tasks such as keypoint transfer. Surprisingly, our method, without any human annotations or simulators, can achieve on-par or even better performance than previous supervised or semi-supervised methods on in-the-wild images. Our project page is: https://kywind.github.io/self-pose .
CNTN: Cyclic Noise-tolerant Network for Gait Recognition
Oct 13, 2022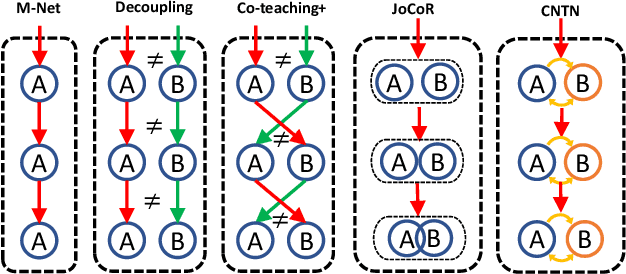
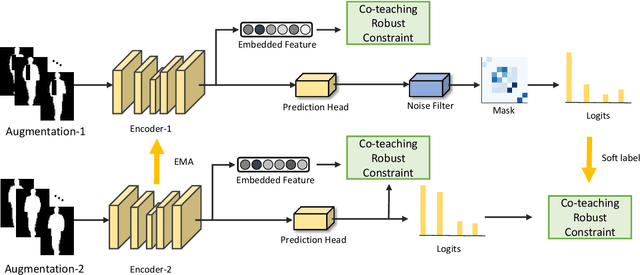
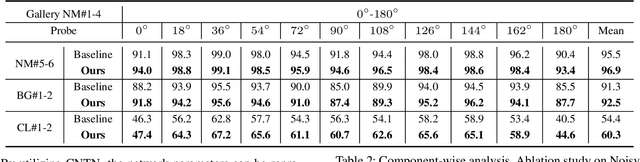
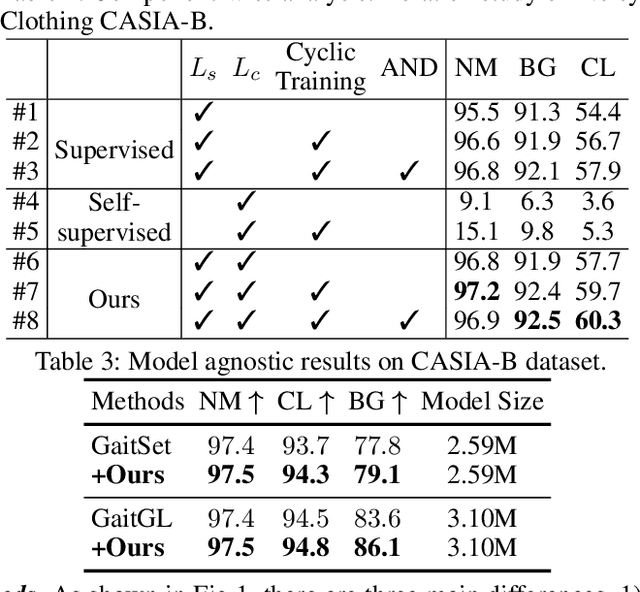
Gait recognition aims to identify individuals by recognizing their walking patterns. However, an observation is made that most of the previous gait recognition methods degenerate significantly due to two memorization effects, namely appearance memorization and label noise memorization. To address the problem, for the first time noisy gait recognition is studied, and a cyclic noise-tolerant network (CNTN) is proposed with a cyclic training algorithm, which equips the two parallel networks with explicitly different abilities, namely one forgetting network and one memorizing network. The overall model will not memorize the pattern unless the two different networks both memorize it. Further, a more refined co-teaching constraint is imposed to help the model learn intrinsic patterns which are less influenced by memorization. Also, to address label noise memorization, an adaptive noise detection module is proposed to rule out the samples with high possibility to be noisy from updating the model. Experiments are conducted on the three most popular benchmarks and CNTN achieves state-of-the-art performances. We also reconstruct two noisy gait recognition datasets, and CNTN gains significant improvements (especially 6% improvements on CL setting). CNTN is also compatible with any off-the-shelf backbones and improves them consistently.