 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Scale-Invariant Fast Functional Registration
Sep 26, 2022
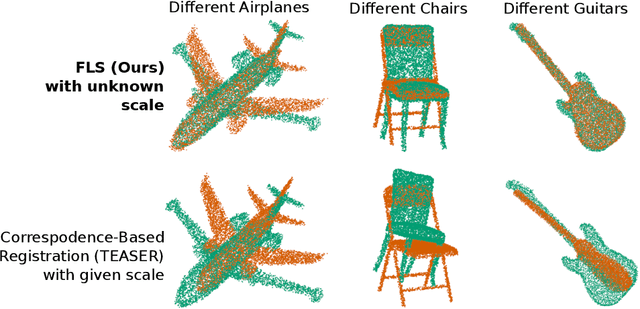
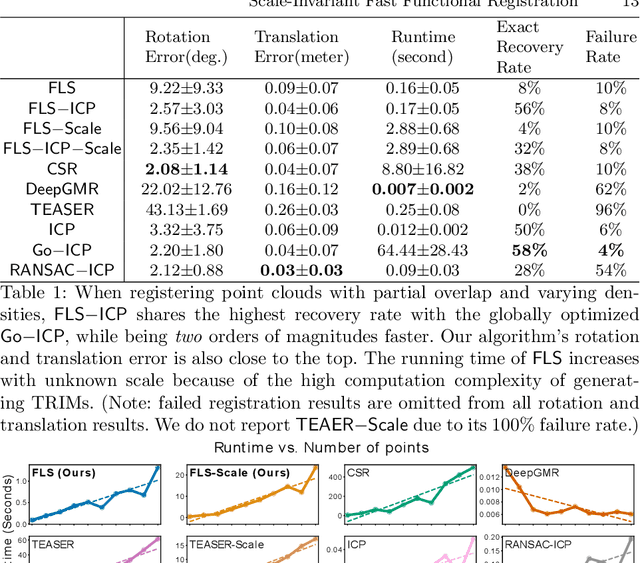
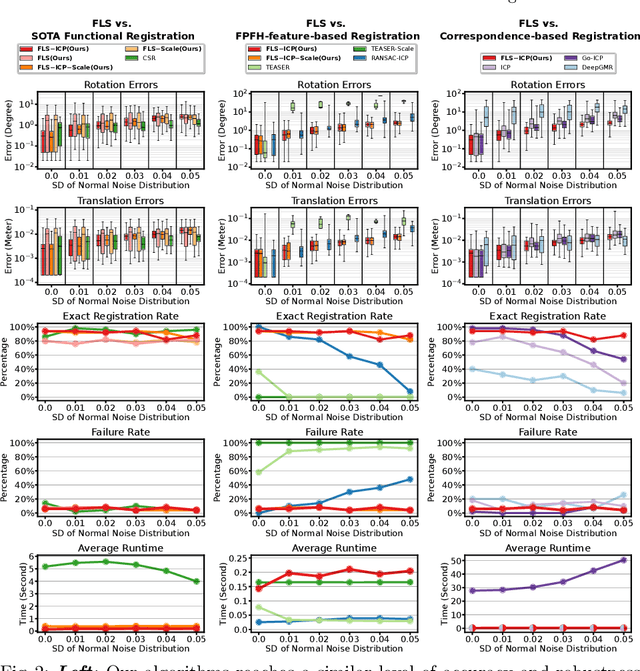
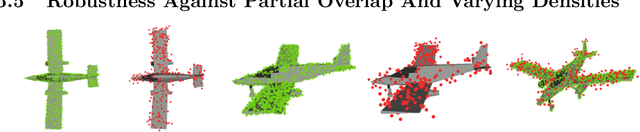
Functional registration algorithms represent point clouds as functions (e.g. spacial occupancy field) avoiding unreliable correspondence estimation in conventional least-squares registration algorithms. However, existing functional registration algorithms are computationally expensive. Furthermore, the capability of registration with unknown scale is necessary in tasks such as CAD model-based object localization, yet no such support exists in functional registration. In this work, we propose a scale-invariant, linear time complexity functional registration algorithm. We achieve linear time complexity through an efficient approximation of L2-distance between functions using orthonormal basis functions. The use of orthonormal basis functions leads to a formulation that is compatible with least-squares registration. Benefited from the least-square formulation, we use the theory of translation-rotation-invariant measurement to decouple scale estimation and therefore achieve scale-invariant registration. We evaluate the proposed algorithm, named FLS (functional least-squares), on standard 3D registration benchmarks, showing FLS is an order of magnitude faster than state-of-the-art functional registration algorithm without compromising accuracy and robustness. FLS also outperforms state-of-the-art correspondence-based least-squares registration algorithm on accuracy and robustness, with known and unknown scale. Finally, we demonstrate applying FLS to register point clouds with varying densities and partial overlaps, point clouds from different objects within the same category, and point clouds from real world objects with noisy RGB-D measurements.
* 17 pages
Applying Machine Learning for Duplicate Detection, Throttling and Prioritization of Equipment Commissioning Audits at Fulfillment Network
Sep 28, 2022
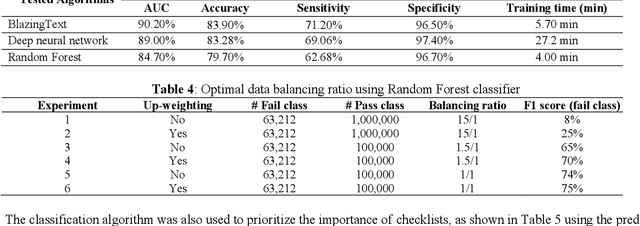
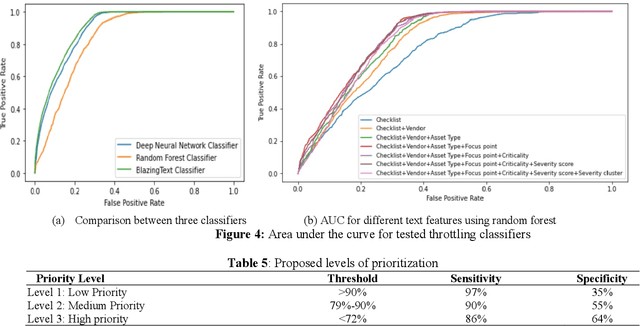
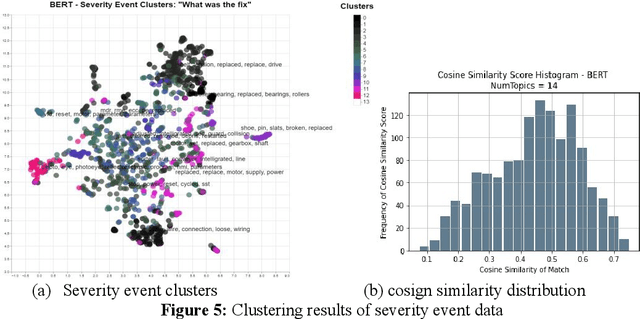
VQ (Vendor Qualification) and IOQ (Installation and Operation Qualification) audits are implemented in warehouses to ensure all equipment being turned over in the fulfillment network meets the quality standards. Audit checks are likely to be skipped if there are many checks to be performed in a short time. In addition, exploratory data analysis reveals several instances of similar checks being performed on the same assets and thus, duplicating the effort. In this work, Natural Language Processing and Machine Learning are applied to trim a large checklist dataset for a network of warehouses by identifying similarities and duplicates, and predict the non-critical ones with a high passing rate. The study proposes ML classifiers to identify checks which have a high passing probability of IOQ and VQ and assign priorities to checks to be prioritized when the time is not available to perform all checks. This research proposes using NLP-based BlazingText classifier to throttle the checklists with a high passing rate, which can reduce 10%-37% of the checks and achieve significant cost reduction. The applied algorithm over performs Random Forest and Neural Network classifiers and achieves an area under the curve of 90%. Because of imbalanced data, down-sampling and upweighting have shown a positive impact on the models' accuracy using F1 score, which improve from 8% to 75%. In addition, the proposed duplicate detection process identifies 17% possible redundant checks to be trimmed.
Real-time motion planning and decision-making for a group of differential drive robots under connectivity constraints using robust MPC and mixed-integer programming
May 31, 2022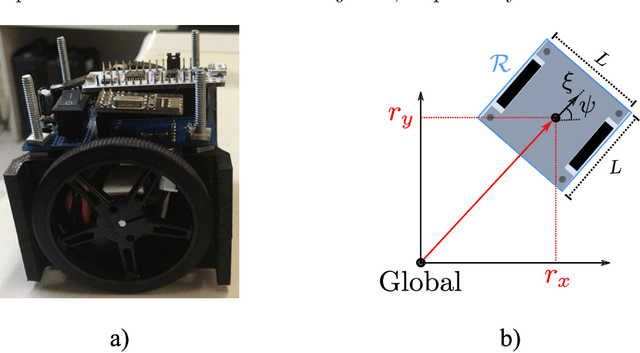
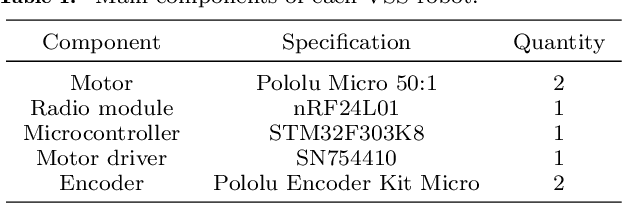
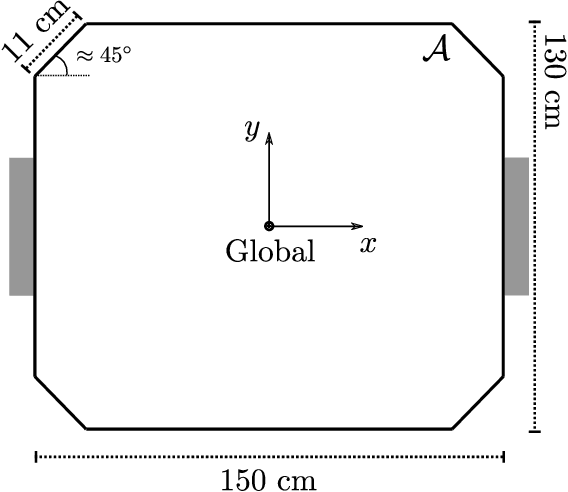
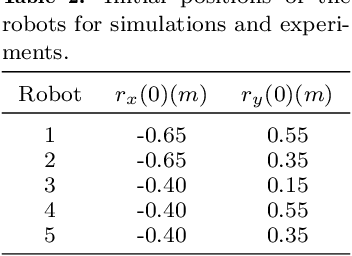
This work is concerned with the problem of planning trajectories and assigning tasks for a Multi-Agent System (MAS) comprised of differential drive robots. We propose a multirate hierarchical control structure that employs a planner based on robust Model Predictive Control (MPC) with mixed-integer programming (MIP) encoding. The planner computes trajectories and assigns tasks for each element of the group in real-time, while also guaranteeing the communication network of the MAS to be robustly connected at all times. Additionally, we provide a data-based methodology to estimate the disturbances sets required by the robust MPC formulation. The results are demonstrated with experiments in two obstacle-filled scenarios
Learning Better Masking for Better Language Model Pre-training
Aug 23, 2022
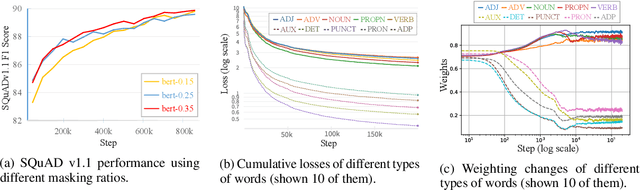
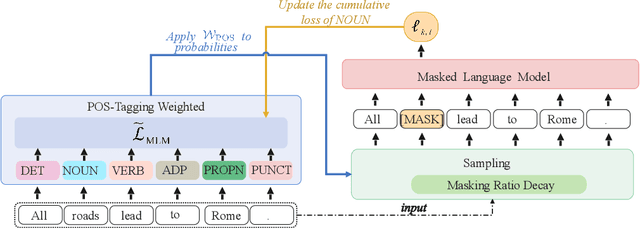
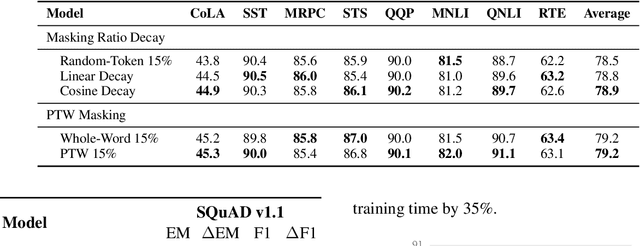
Masked Language Modeling (MLM) has been widely used as the denoising objective in pre-training language models (PrLMs). Existing PrLMs commonly adopt a random-token masking strategy where a fixed masking ratio is applied and different contents are masked by an equal probability throughout the entire training. However, the model may receive complicated impact from pre-training status, which changes accordingly as training time goes on. In this paper, we show that such time-invariant MLM settings on masking ratio and masked content are unlikely to deliver an optimal outcome, which motivates us to explore the influence of time-variant MLM settings. We propose two scheduled masking approaches that adaptively tune the masking ratio and contents in different training stages, which improves the pre-training efficiency and effectiveness verified on the downstream tasks. Our work is a pioneer study on time-variant masking strategy on ratio and contents and gives a better understanding of how masking ratio and masked content influence the MLM pre-training.
TransVisDrone: Spatio-Temporal Transformer for Vision-based Drone-to-Drone Detection in Aerial Videos
Oct 16, 2022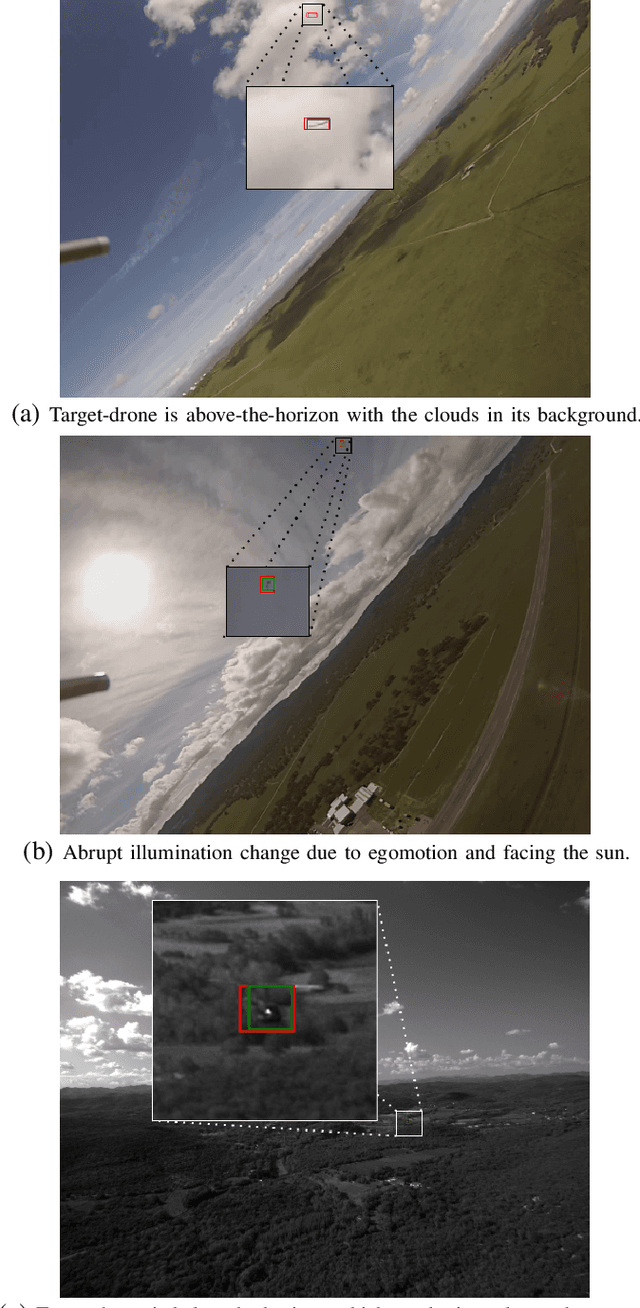
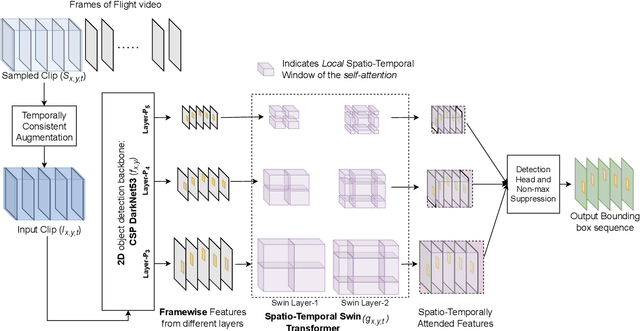
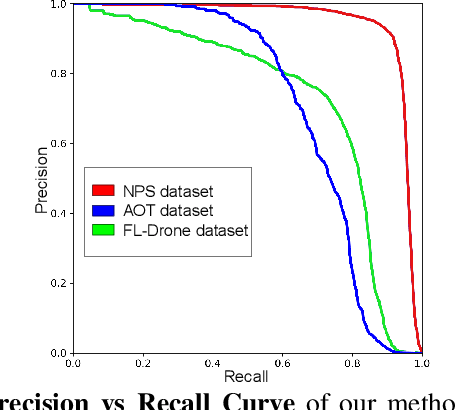
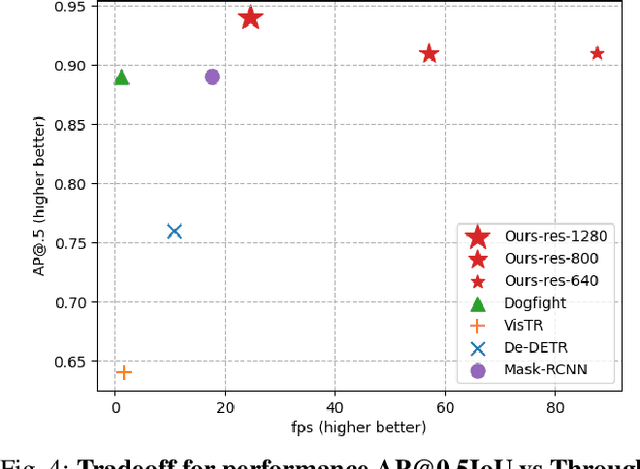
Drone-to-drone detection using visual feed has crucial applications like avoiding collision with other drones/airborne objects, tackling a drone attack or coordinating flight with other drones. However, the existing methods are computationally costly, follow a non-end-to-end optimization and have complex multi-stage pipeline, which make them less suitable to deploy on edge devices for real-time drone flight. In this work, we propose a simple-yet-effective framework TransVisDrone, which provides end-to-end solution with higher computational efficiency. We utilize CSPDarkNet-53 network to learn object-related spatial features and VideoSwin model to learn the spatio-temporal dependencies of drone motion which improves drone detection in challenging scenarios. Our method obtains state-of-the-art performance on three challenging real-world datasets (Average Precision@0.5IOU): NPS 0.95, FLDrones 0.75 and AOT 0.80. Apart from its superior performance, it achieves higher throughput than the prior work. We also demonstrate its deployment capability on edge-computing devices and usefulness in applications like drone-collision (encounter) detection. Code: \url{https://github.com/tusharsangam/TransVisDrone}.
Automatic Emergency Dust-Free solution on-board International Space Station with Bi-GRU (AED-ISS)
Oct 16, 2022
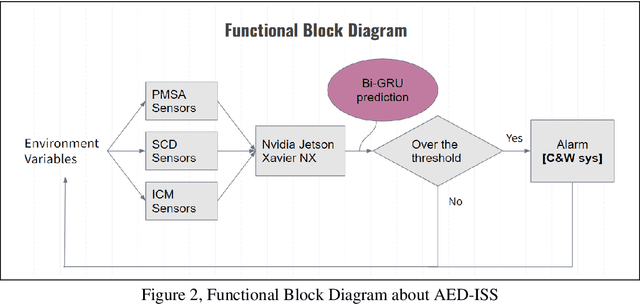
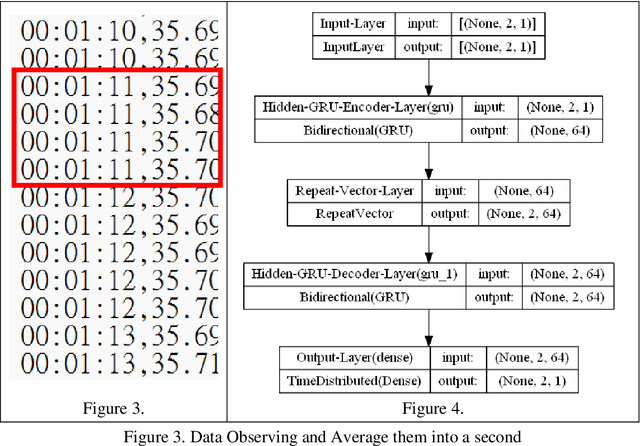
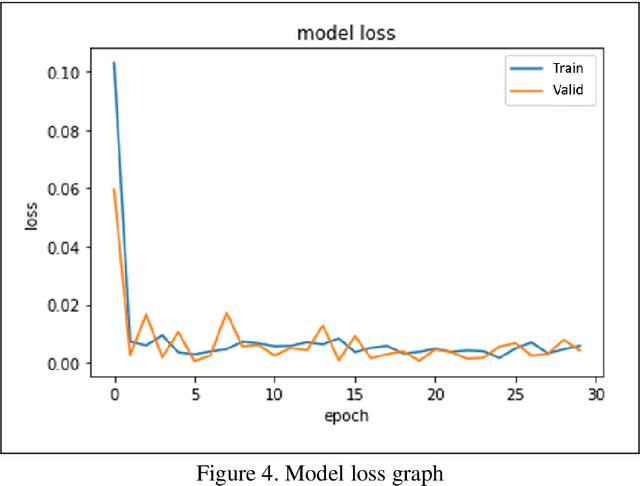
With a rising attention for the issue of PM2.5 or PM0.3, particulate matters have become not only a potential threat to both the environment and human, but also a harming existence to instruments onboard International Space Station (ISS). Our team is aiming to relate various concentration of particulate matters to magnetic fields, humidity, acceleration, temperature, pressure and CO2 concentration. Our goal is to establish an early warning system (EWS), which is able to forecast the levels of particulate matters and provides ample reaction time for astronauts to protect their instruments in some experiments or increase the accuracy of the measurements; In addition, the constructed model can be further developed into a prototype of a remote-sensing smoke alarm for applications related to fires. In this article, we will implement the Bi-GRU (Bidirectional Gated Recurrent Unit) algorithms that collect data for past 90 minutes and predict the levels of particulates which over 2.5 micrometer per 0.1 liter for the next 1 minute, which is classified as an early warning
Physics-Informed Graph Neural Network for Spatial-temporal Production Forecasting
Sep 23, 2022

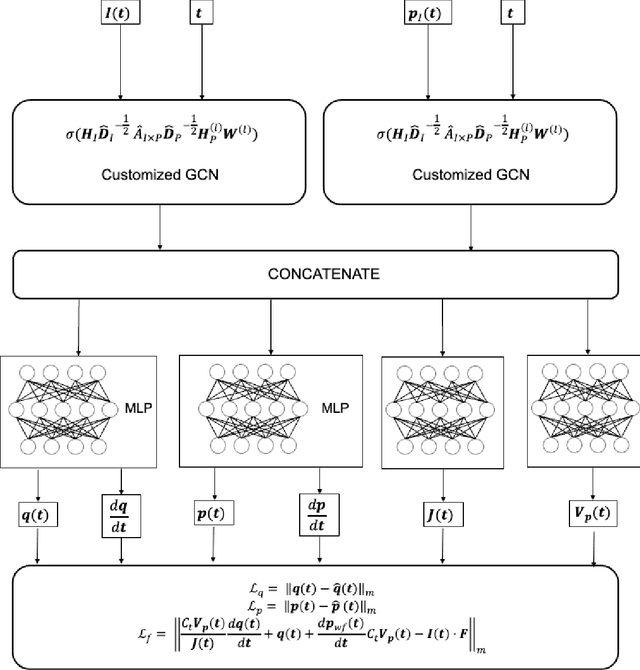
Production forecast based on historical data provides essential value for developing hydrocarbon resources. Classic history matching workflow is often computationally intense and geometry-dependent. Analytical data-driven models like decline curve analysis (DCA) and capacitance resistance models (CRM) provide a grid-free solution with a relatively simple model capable of integrating some degree of physics constraints. However, the analytical solution may ignore subsurface geometries and is appropriate only for specific flow regimes and otherwise may violate physics conditions resulting in degraded model prediction accuracy. Machine learning-based predictive model for time series provides non-parametric, assumption-free solutions for production forecasting, but are prone to model overfit due to training data sparsity; therefore may be accurate over short prediction time intervals. We propose a grid-free, physics-informed graph neural network (PI-GNN) for production forecasting. A customized graph convolution layer aggregates neighborhood information from historical data and has the flexibility to integrate domain expertise into the data-driven model. The proposed method relaxes the dependence on close-form solutions like CRM and honors the given physics-based constraints. Our proposed method is robust, with improved performance and model interpretability relative to the conventional CRM and GNN baseline without physics constraints.
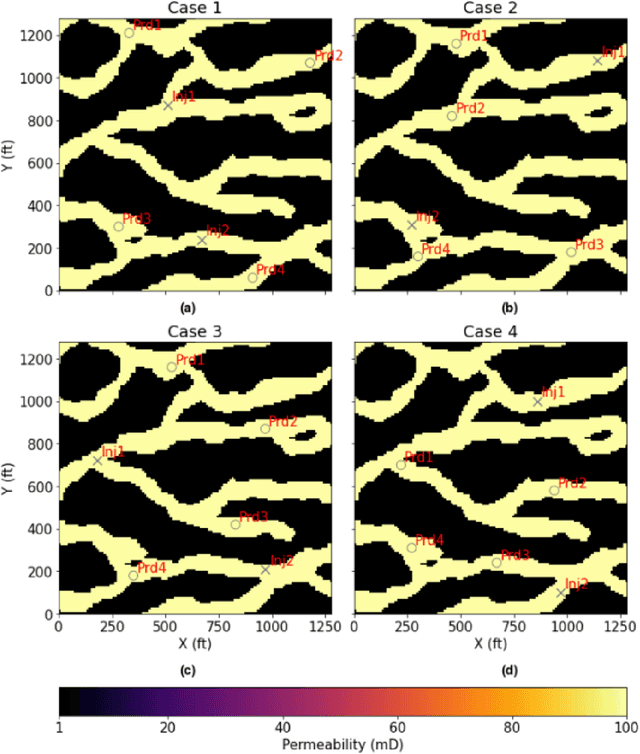
Deep object detection for waterbird monitoring using aerial imagery
Oct 10, 2022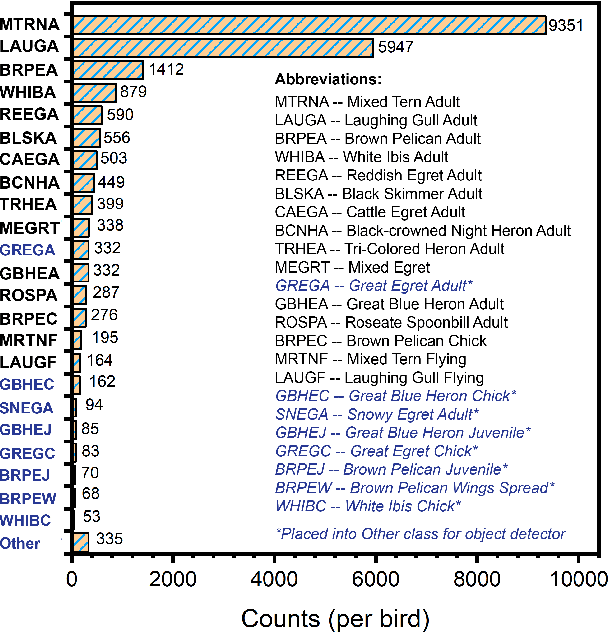
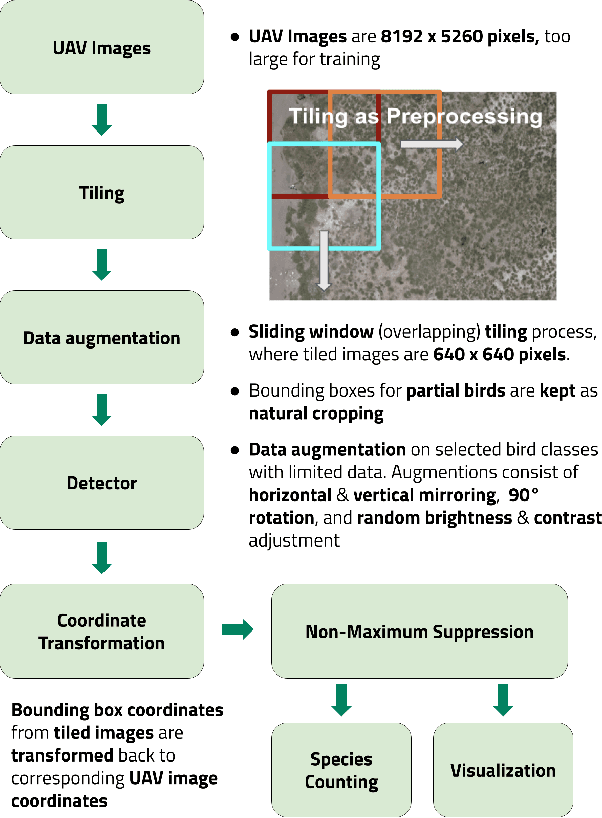
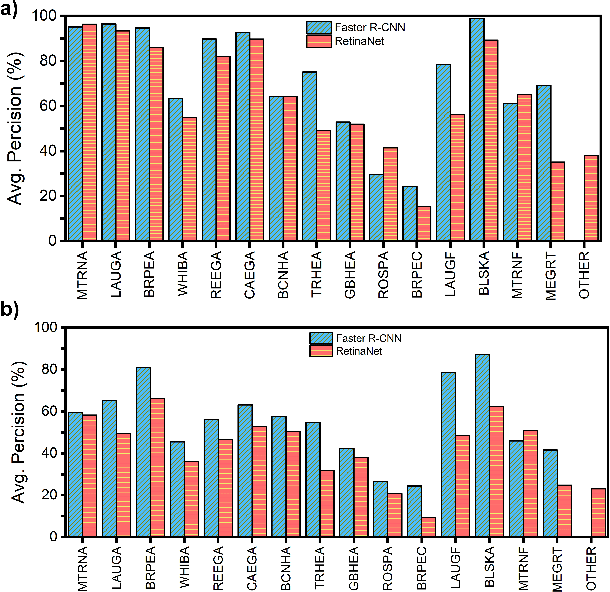
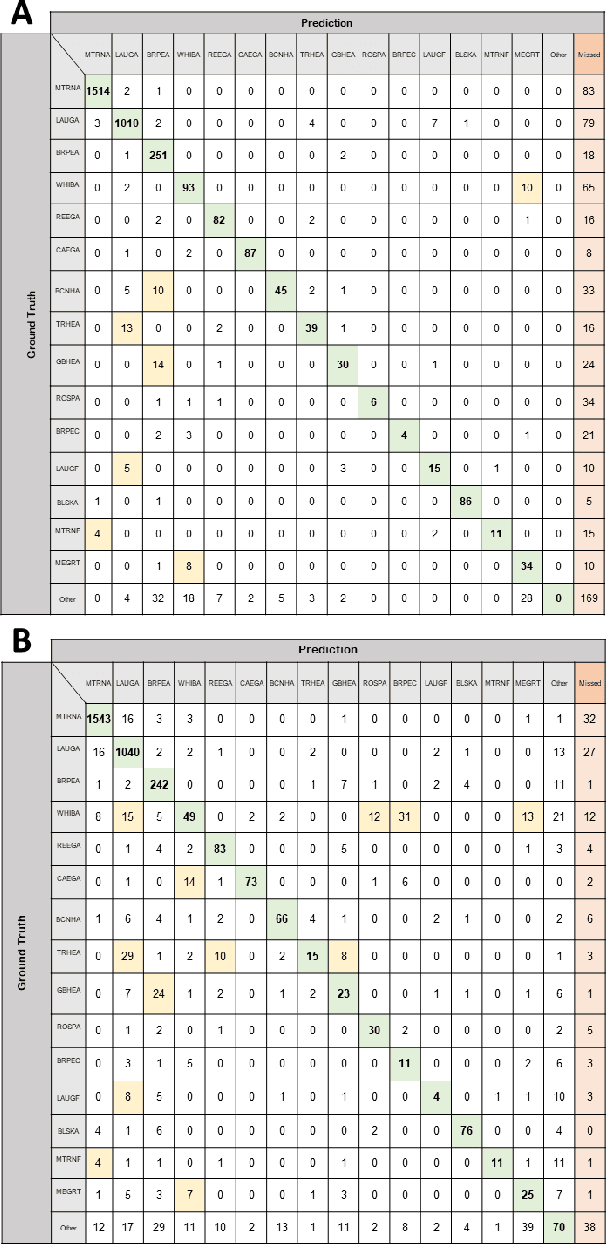
Monitoring of colonial waterbird nesting islands is essential to tracking waterbird population trends, which are used for evaluating ecosystem health and informing conservation management decisions. Recently, unmanned aerial vehicles, or drones, have emerged as a viable technology to precisely monitor waterbird colonies. However, manually counting waterbirds from hundreds, or potentially thousands, of aerial images is both difficult and time-consuming. In this work, we present a deep learning pipeline that can be used to precisely detect, count, and monitor waterbirds using aerial imagery collected by a commercial drone. By utilizing convolutional neural network-based object detectors, we show that we can detect 16 classes of waterbird species that are commonly found in colonial nesting islands along the Texas coast. Our experiments using Faster R-CNN and RetinaNet object detectors give mean interpolated average precision scores of 67.9% and 63.1% respectively.
Multi-Robot Localization and Target Tracking with Connectivity Maintenance and Collision Avoidance
Oct 10, 2022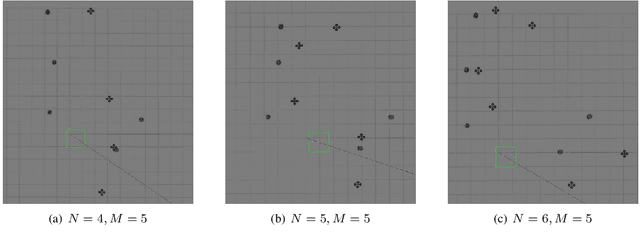
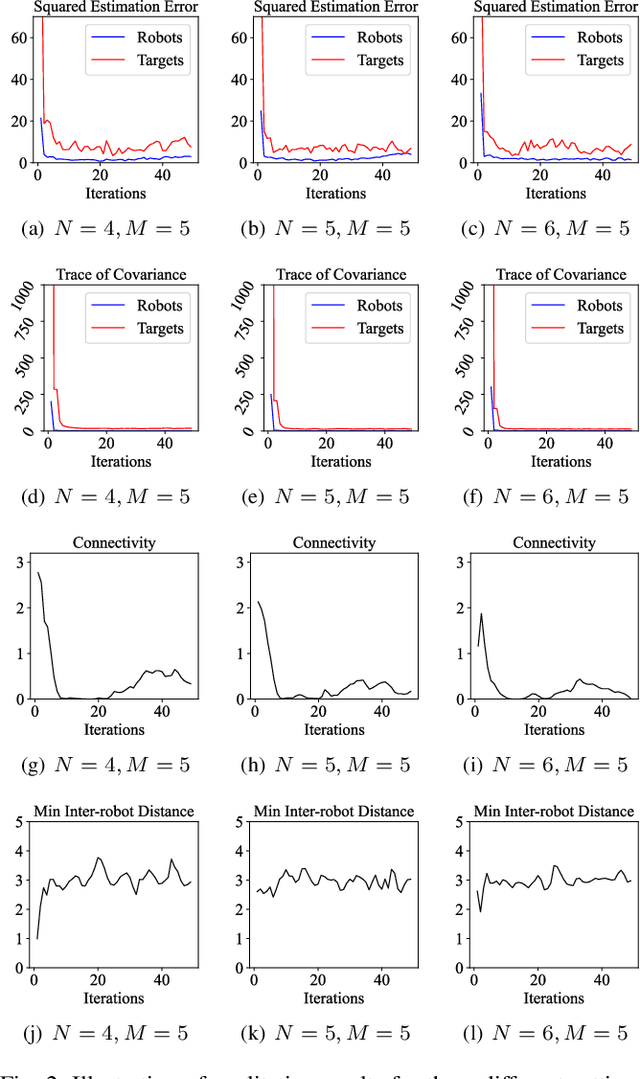
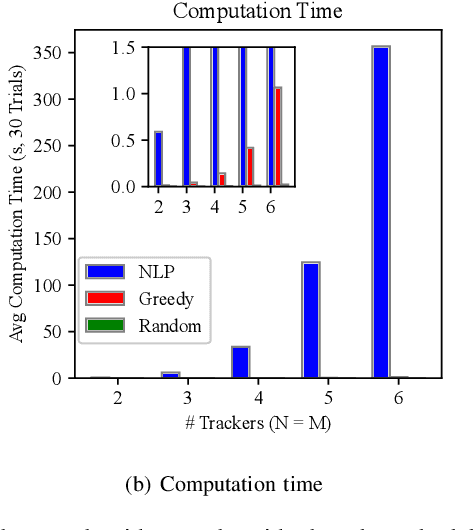
We study the problem that requires a team of robots to perform joint localization and target tracking task while ensuring team connectivity and collision avoidance. The problem can be formalized as a nonlinear, non-convex optimization program, which is typically hard to solve. To this end, we design a two-staged approach that utilizes a greedy algorithm to optimize the joint localization and target tracking performance and applies control barrier functions to ensure safety constraints, i.e., maintaining connectivity of the robot team and preventing inter-robot collisions. Simulated Gazebo experiments verify the effectiveness of the proposed approach. We further compare our greedy algorithm to a non-linear optimization solver and a random algorithm, in terms of the joint localization and tracking quality as well as the computation time. The results demonstrate that our greedy algorithm achieves high task quality and runs efficiently.
Recommendations in a Multi-Domain Setting: Adapting for Customization, Scalability and Real-Time Performance
Mar 02, 2022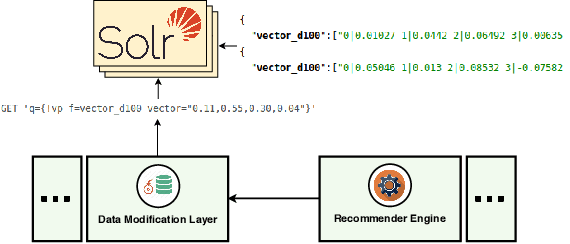
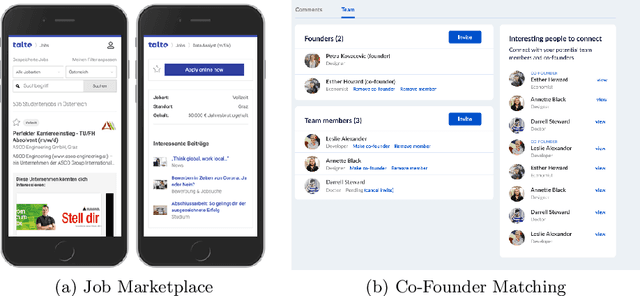
In this industry talk at ECIR'2022, we illustrate how to build a modern recommender system that can serve recommendations in real-time for a diverse set of application domains. Specifically, we present our system architecture that utilizes popular recommendation algorithms from the literature such as Collaborative Filtering, Content-based Filtering as well as various neural embedding approaches (e.g., Doc2Vec, Autoencoders, etc.). We showcase the applicability of our system architecture using two real-world use-cases, namely providing recommendations for the domains of (i) job marketplaces, and (ii) entrepreneurial start-up founding. We strongly believe that our experiences from both research- and industry-oriented settings should be of interest for practitioners in the field of real-time multi-domain recommender systems.