 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
POBEVM: Real-time Video Matting via Progressively Optimize the Target Body and Edge
Feb 15, 2024
Deep convolutional neural networks (CNNs) based approaches have achieved great performance in video matting. Many of these methods can produce accurate alpha estimation for the target body but typically yield fuzzy or incorrect target edges. This is usually caused by the following reasons: 1) The current methods always treat the target body and edge indiscriminately; 2) Target body dominates the whole target with only a tiny proportion target edge. For the first problem, we propose a CNN-based module that separately optimizes the matting target body and edge (SOBE). And on this basis, we introduce a real-time, trimap-free video matting method via progressively optimizing the matting target body and edge (POBEVM) that is much lighter than previous approaches and achieves significant improvements in the predicted target edge. For the second problem, we propose an Edge-L1-Loss (ELL) function that enforces our network on the matting target edge. Experiments demonstrate our method outperforms prior trimap-free matting methods on both Distinctions-646 (D646) and VideoMatte240K(VM) dataset, especially in edge optimization.
Principal Component Analysis as a Sanity Check for Bayesian Phylolinguistic Reconstruction
Feb 29, 2024Bayesian approaches to reconstructing the evolutionary history of languages rely on the tree model, which assumes that these languages descended from a common ancestor and underwent modifications over time. However, this assumption can be violated to different extents due to contact and other factors. Understanding the degree to which this assumption is violated is crucial for validating the accuracy of phylolinguistic inference. In this paper, we propose a simple sanity check: projecting a reconstructed tree onto a space generated by principal component analysis. By using both synthetic and real data, we demonstrate that our method effectively visualizes anomalies, particularly in the form of jogging.
Whole-body Humanoid Robot Locomotion with Human Reference
Mar 01, 2024Recently, humanoid robots have made significant advances in their ability to perform challenging tasks due to the deployment of Reinforcement Learning (RL), however, the inherent complexity of humanoid robots, including the difficulty of designing complicated reward functions and training entire sophisticated systems, still poses a notable challenge. To conquer these challenges, after many iterations and in-depth investigations, we have meticulously developed a full-size humanoid robot, "Adam", whose innovative structural design greatly improves the efficiency and effectiveness of the imitation learning process. In addition, we have developed a novel imitation learning framework based on an adversarial motion prior, which applies not only to Adam but also to humanoid robots in general. Using the framework, Adam can exhibit unprecedented human-like characteristics in locomotion tasks. Our experimental results demonstrate that the proposed framework enables Adam to achieve human-comparable performance in complex locomotion tasks, marking the first time that human locomotion data has been used for imitation learning in a full-size humanoid robot.
MATHWELL: Generating Educational Math Word Problems at Scale
Mar 01, 2024Math word problems are critical K-8 educational tools, but writing them is time-consuming and requires domain expertise. We suggest that language models can support K-8 math education by automatically generating problems at scale. To be educational, generated problems must be 1) solvable, 2) accurate, and 3) appropriate. Existing datasets are unlabeled for these criteria, making them ill-suited for training problem generators. We introduce MATHWELL, a Llama-2 (70B) model iteratively finetuned to generate K-8 math word problems using data from expert annotation. Using MATHWELL, we generate the largest English word problem dataset with Program of Thought (PoT) rationales to date, containing 20,490 problems. 3,484 are scored by domain experts who find MATHWELL has a 40% higher share of problems that have executable solutions and meet all criteria than alternatives, with 74% of its problems with executable solutions being solvable, accurate, and appropriate. We release our model, data, and annotations.
Non-stationarity Characteristics in Dynamic Vehicular ISAC Channels at 28 GHz
Mar 01, 2024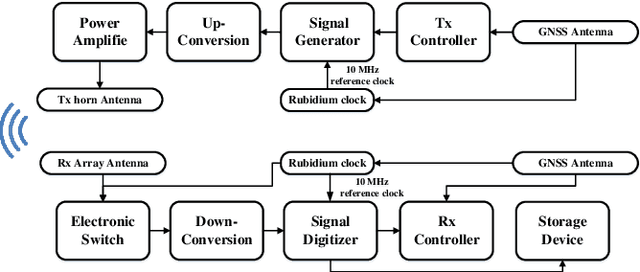

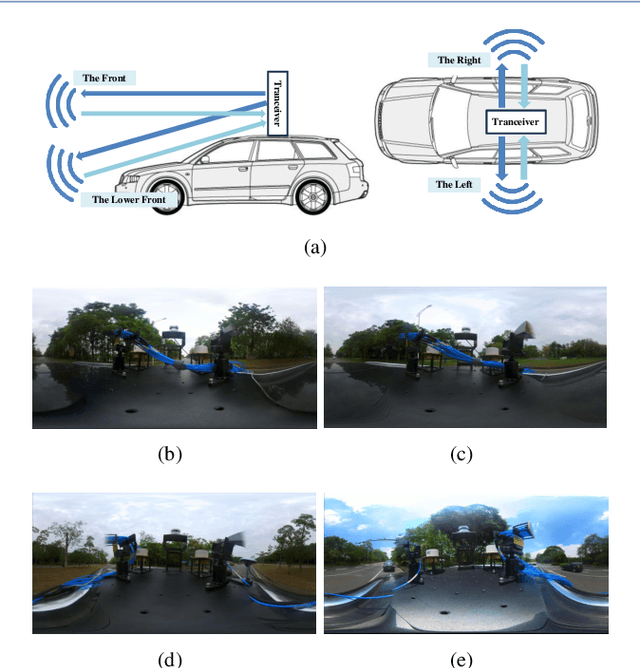
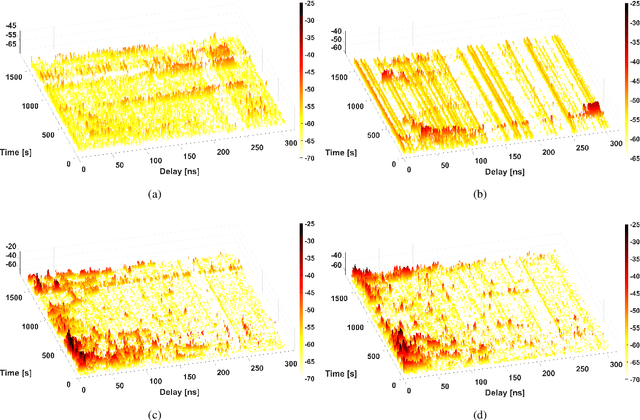
Integrated sensing and communications (ISAC) is a potential technology of 6G, aiming to enable end-to-end information processing ability and native perception capability for future communication systems. As an important part of the ISAC application scenarios, ISAC aided vehicle-to-everything (V2X) can improve the traffic efficiency and safety through intercommunication and synchronous perception. It is necessary to carry out measurement, characterization, and modeling for vehicular ISAC channels as the basic theoretical support for system design. In this paper, dynamic vehicular ISAC channel measurements at 28 GHz are carried out and provide data for the characterization of non-stationarity characteristics. Based on the actual measurements, this paper analyzes the time-varying PDPs, RMSDS and non-stationarity characteristics of front, lower front, left and right perception directions in a complicated V2X scenarios. The research in this paper can enrich the investigation of vehicular ISAC channels and enable the analysis and design of vehicular ISAC systems.
On Cyclical MCMC Sampling
Mar 01, 2024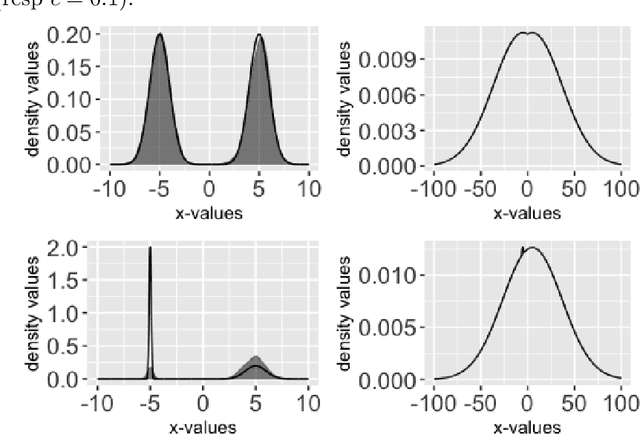
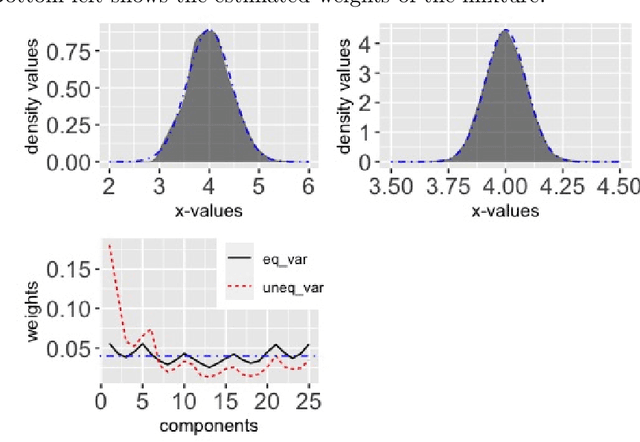
Cyclical MCMC is a novel MCMC framework recently proposed by Zhang et al. (2019) to address the challenge posed by high-dimensional multimodal posterior distributions like those arising in deep learning. The algorithm works by generating a nonhomogeneous Markov chain that tracks -- cyclically in time -- tempered versions of the target distribution. We show in this work that cyclical MCMC converges to the desired probability distribution in settings where the Markov kernels used are fast mixing, and sufficiently long cycles are employed. However in the far more common settings of slow mixing kernels, the algorithm may fail to produce samples from the desired distribution. In particular, in a simple mixture example with unequal variance, we show by simulation that cyclical MCMC fails to converge to the desired limit. Finally, we show that cyclical MCMC typically estimates well the local shape of the target distribution around each mode, even when we do not have convergence to the target.
Hierarchical Indexing for Retrieval-Augmented Opinion Summarization
Mar 01, 2024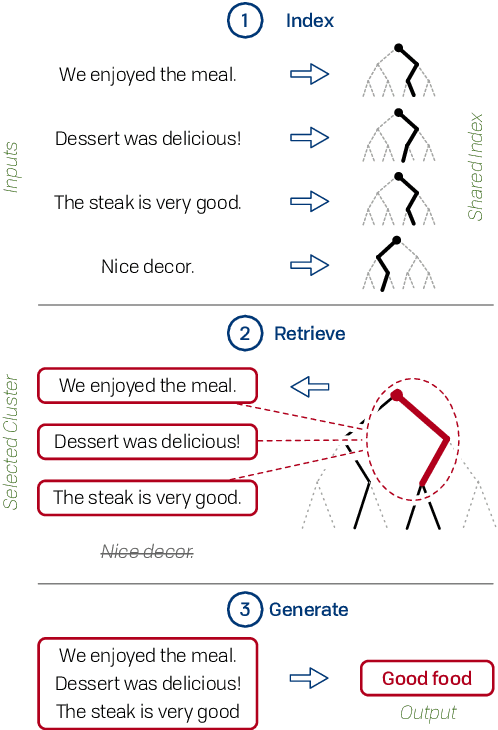
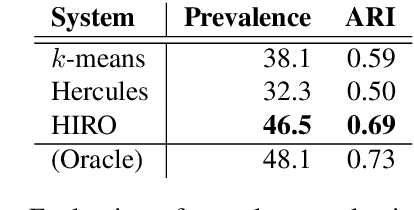
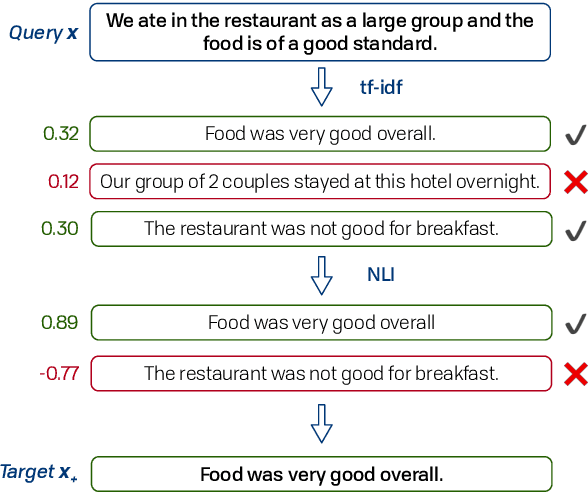
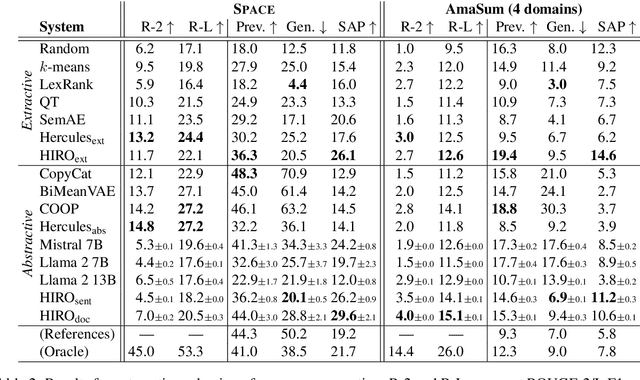
We propose a method for unsupervised abstractive opinion summarization, that combines the attributability and scalability of extractive approaches with the coherence and fluency of Large Language Models (LLMs). Our method, HIRO, learns an index structure that maps sentences to a path through a semantically organized discrete hierarchy. At inference time, we populate the index and use it to identify and retrieve clusters of sentences containing popular opinions from input reviews. Then, we use a pretrained LLM to generate a readable summary that is grounded in these extracted evidential clusters. The modularity of our approach allows us to evaluate its efficacy at each stage. We show that HIRO learns an encoding space that is more semantically structured than prior work, and generates summaries that are more representative of the opinions in the input reviews. Human evaluation confirms that HIRO generates more coherent, detailed and accurate summaries that are significantly preferred by annotators compared to prior work.
Generalized User Representations for Transfer Learning
Mar 01, 2024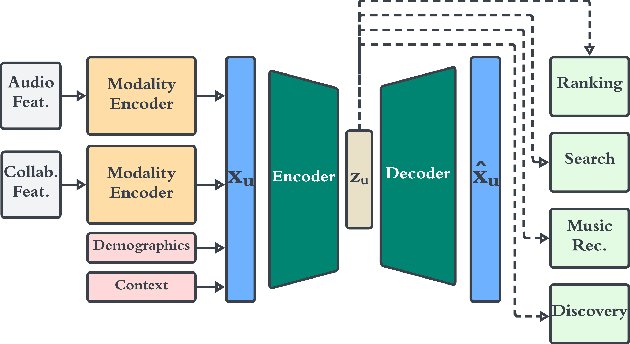
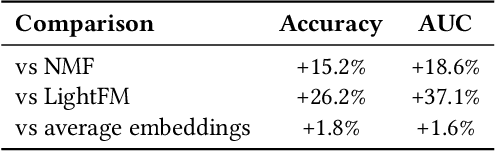
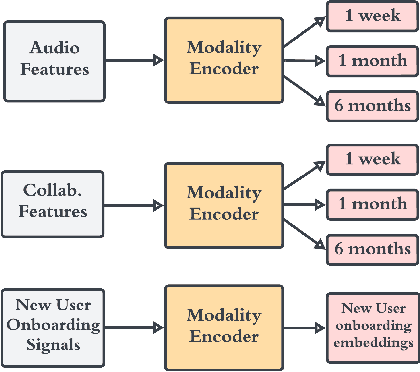
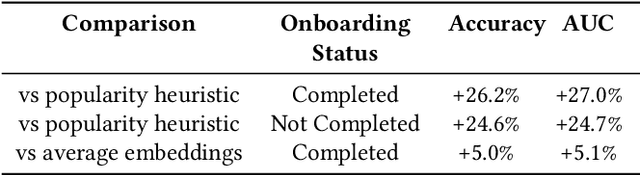
We present a novel framework for user representation in large-scale recommender systems, aiming at effectively representing diverse user taste in a generalized manner. Our approach employs a two-stage methodology combining representation learning and transfer learning. The representation learning model uses an autoencoder that compresses various user features into a representation space. In the second stage, downstream task-specific models leverage user representations via transfer learning instead of curating user features individually. We further augment this methodology on the representation's input features to increase flexibility and enable reaction to user events, including new user experiences, in Near-Real Time. Additionally, we propose a novel solution to manage deployment of this framework in production models, allowing downstream models to work independently. We validate the performance of our framework through rigorous offline and online experiments within a large-scale system, showcasing its remarkable efficacy across multiple evaluation tasks. Finally, we show how the proposed framework can significantly reduce infrastructure costs compared to alternative approaches.
DISORF: A Distributed Online NeRF Training and Rendering Framework for Mobile Robots
Mar 01, 2024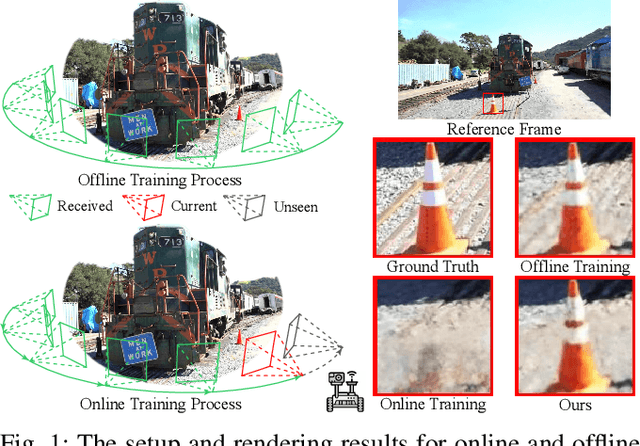
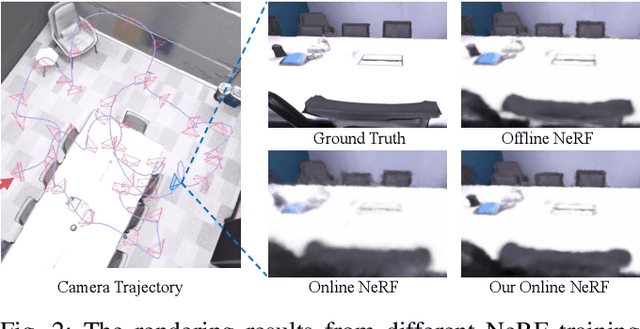
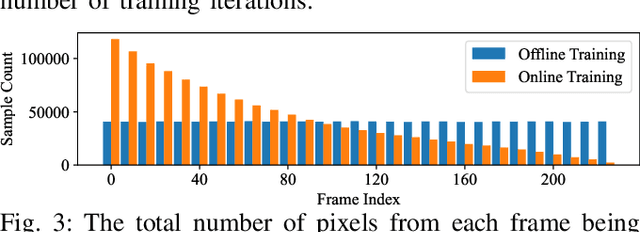
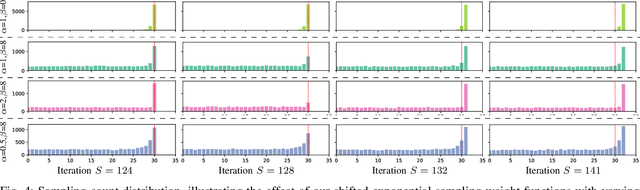
We present a framework, DISORF, to enable online 3D reconstruction and visualization of scenes captured by resource-constrained mobile robots and edge devices. To address the limited compute capabilities of edge devices and potentially limited network availability, we design a framework that efficiently distributes computation between the edge device and remote server. We leverage on-device SLAM systems to generate posed keyframes and transmit them to remote servers that can perform high quality 3D reconstruction and visualization at runtime by leveraging NeRF models. We identify a key challenge with online NeRF training where naive image sampling strategies can lead to significant degradation in rendering quality. We propose a novel shifted exponential frame sampling method that addresses this challenge for online NeRF training. We demonstrate the effectiveness of our framework in enabling high-quality real-time reconstruction and visualization of unknown scenes as they are captured and streamed from cameras in mobile robots and edge devices.
MuseGraph: Graph-oriented Instruction Tuning of Large Language Models for Generic Graph Mining
Mar 02, 2024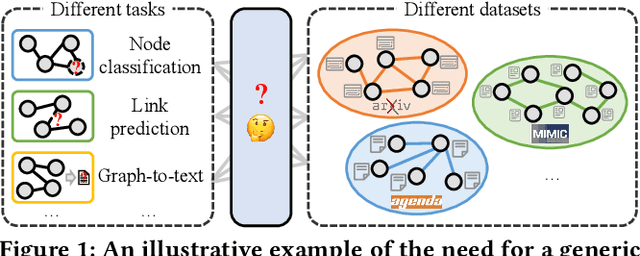
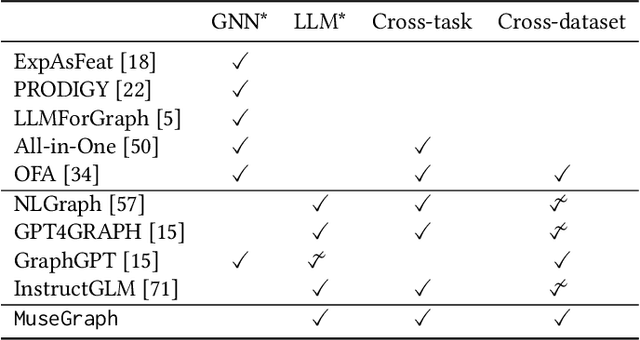
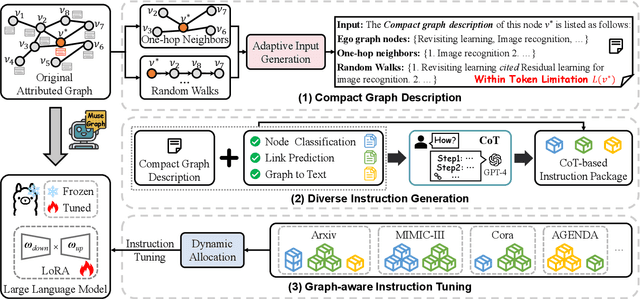
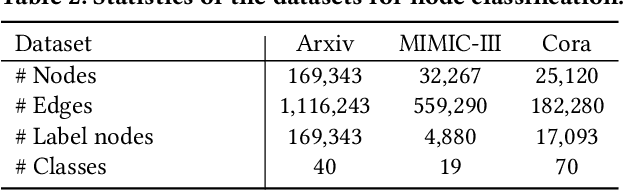
Graphs with abundant attributes are essential in modeling interconnected entities and improving predictions in various real-world applications. Traditional Graph Neural Networks (GNNs), which are commonly used for modeling attributed graphs, need to be re-trained every time when applied to different graph tasks and datasets. Although the emergence of Large Language Models (LLMs) has introduced a new paradigm in natural language processing, the generative potential of LLMs in graph mining remains largely under-explored. To this end, we propose a novel framework MuseGraph, which seamlessly integrates the strengths of GNNs and LLMs and facilitates a more effective and generic approach for graph mining across different tasks and datasets. Specifically, we first introduce a compact graph description via the proposed adaptive input generation to encapsulate key information from the graph under the constraints of language token limitations. Then, we propose a diverse instruction generation mechanism, which distills the reasoning capabilities from LLMs (e.g., GPT-4) to create task-specific Chain-of-Thought-based instruction packages for different graph tasks. Finally, we propose a graph-aware instruction tuning with a dynamic instruction package allocation strategy across tasks and datasets, ensuring the effectiveness and generalization of the training process. Our experimental results demonstrate significant improvements in different graph tasks, showcasing the potential of our MuseGraph in enhancing the accuracy of graph-oriented downstream tasks while keeping the generation powers of LLMs.