 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
A Call to Reflect on Evaluation Practices for Failure Detection in Image Classification
Nov 28, 2022
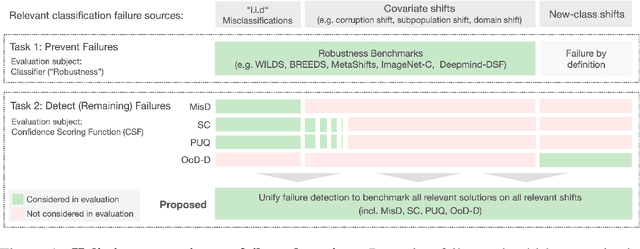
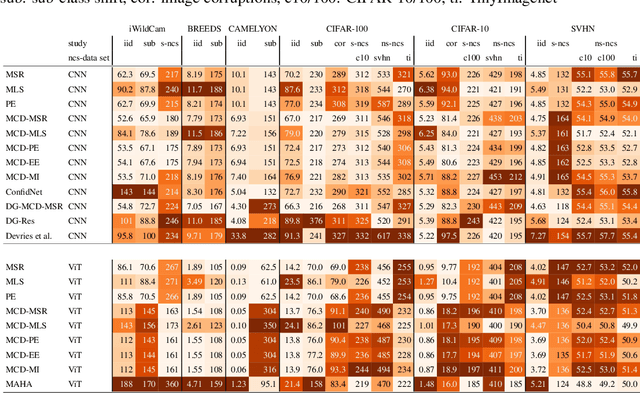
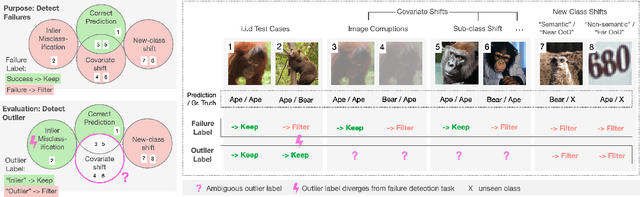
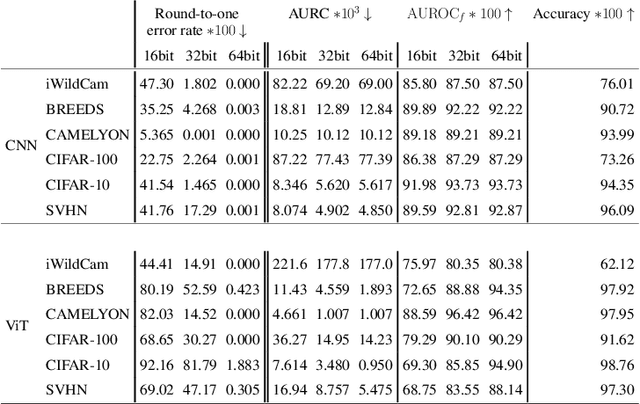
Reliable application of machine learning-based decision systems in the wild is one of the major challenges currently investigated by the field. A large portion of established approaches aims to detect erroneous predictions by means of assigning confidence scores. This confidence may be obtained by either quantifying the model's predictive uncertainty, learning explicit scoring functions, or assessing whether the input is in line with the training distribution. Curiously, while these approaches all state to address the same eventual goal of detecting failures of a classifier upon real-life application, they currently constitute largely separated research fields with individual evaluation protocols, which either exclude a substantial part of relevant methods or ignore large parts of relevant failure sources. In this work, we systematically reveal current pitfalls caused by these inconsistencies and derive requirements for a holistic and realistic evaluation of failure detection. To demonstrate the relevance of this unified perspective, we present a large-scale empirical study for the first time enabling benchmarking confidence scoring functions w.r.t all relevant methods and failure sources. The revelation of a simple softmax response baseline as the overall best performing method underlines the drastic shortcomings of current evaluation in the abundance of publicized research on confidence scoring. Code and trained models are at https://github.com/IML-DKFZ/fd-shifts.
FsaNet: Frequency Self-attention for Semantic Segmentation
Nov 28, 2022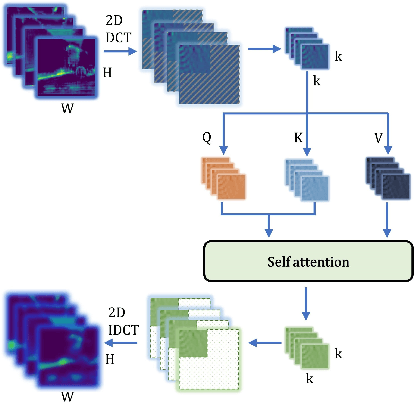
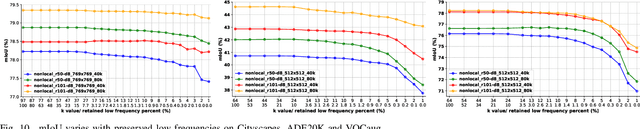
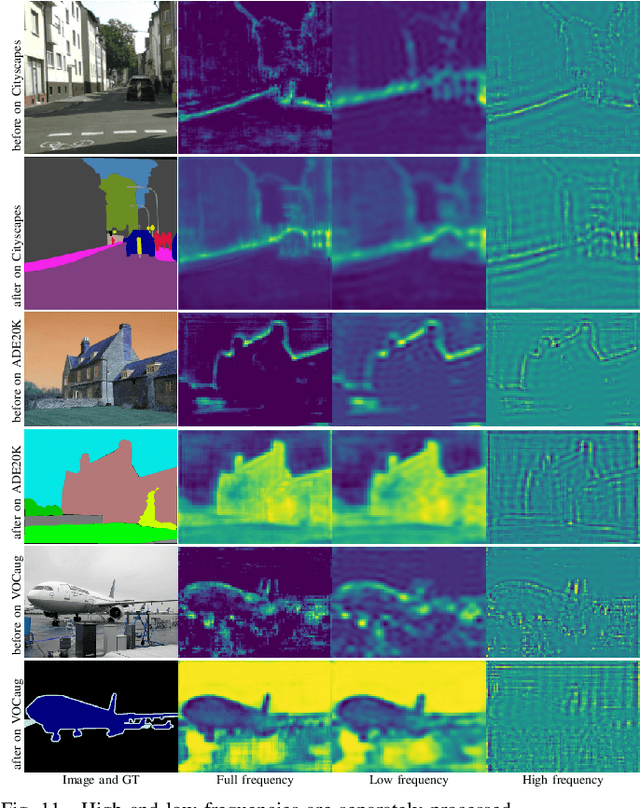
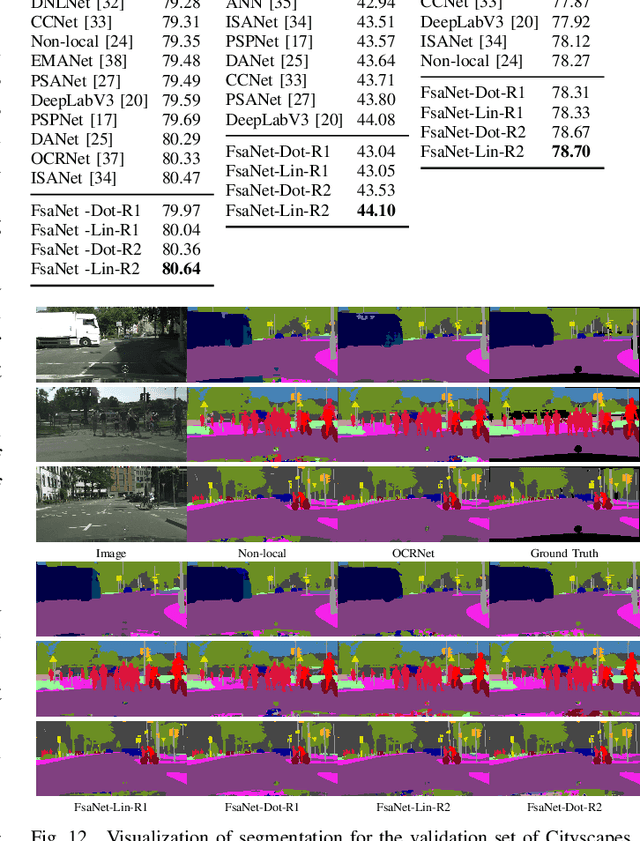
Considering the spectral properties of images, we propose a new self-attention mechanism with highly reduced computational complexity, up to a linear rate. To better preserve edges while promoting similarity within objects, we propose individualized processes over different frequency bands. In particular, we study a case where the process is merely over low-frequency components. By ablation study, we show that low frequency self-attention can achieve very close or better performance relative to full frequency even without retraining the network. Accordingly, we design and embed novel plug-and-play modules to the head of a CNN network that we refer to as FsaNet. The frequency self-attention 1) takes low frequency coefficients as input, 2) can be mathematically equivalent to spatial domain self-attention with linear structures, 3) simplifies token mapping ($1\times1$ convolution) stage and token mixing stage simultaneously. We show that the frequency self-attention requires $87.29\% \sim 90.04\%$ less memory, $96.13\% \sim 98.07\%$ less FLOPs, and $97.56\% \sim 98.18\%$ in run time than the regular self-attention. Compared to other ResNet101-based self-attention networks, FsaNet achieves a new state-of-the-art result ($83.0\%$ mIoU) on Cityscape test dataset and competitive results on ADE20k and VOCaug.
Satlas: A Large-Scale, Multi-Task Dataset for Remote Sensing Image Understanding
Nov 28, 2022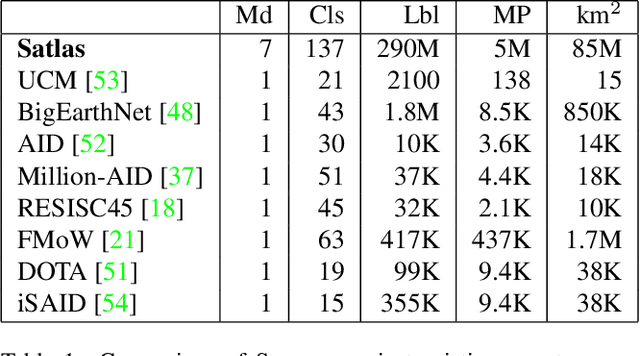
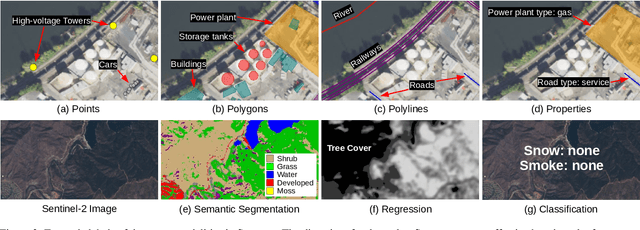
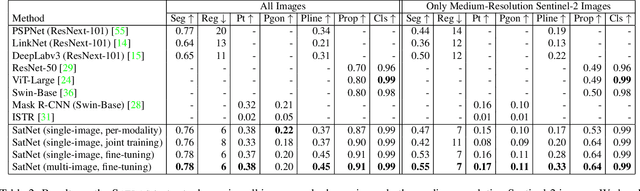
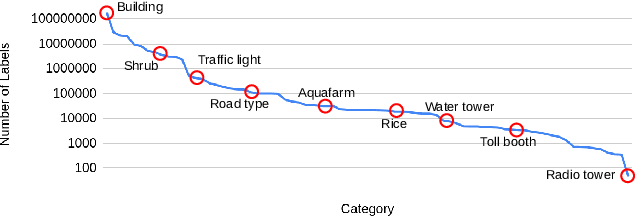
Remote sensing images are useful for a wide variety of environmental and earth monitoring tasks, including tracking deforestation, illegal fishing, urban expansion, and natural disasters. The earth is extremely diverse -- the amount of potential tasks in remote sensing images is massive, and the sizes of features range from several kilometers to just tens of centimeters. However, creating generalizable computer vision methods is a challenge in part due to the lack of a large-scale dataset that captures these diverse features for many tasks. In this paper, we present Satlas, a remote sensing dataset and benchmark that is large in both breadth, featuring all of the aforementioned applications and more, as well as scale, comprising 290M labels under 137 categories and seven label modalities. We evaluate eight baselines and a proposed method on Satlas, and find that there is substantial room for improvement in addressing research challenges specific to remote sensing, including processing image time series that consist of images from very different types of sensors, and taking advantage of long-range spatial context. We also find that pre-training on Satlas substantially improves performance on downstream tasks with few labeled examples, increasing average accuracy by 16% over ImageNet and 5% over the next best baseline.
DGI: Easy and Efficient Inference for GNNs
Nov 28, 2022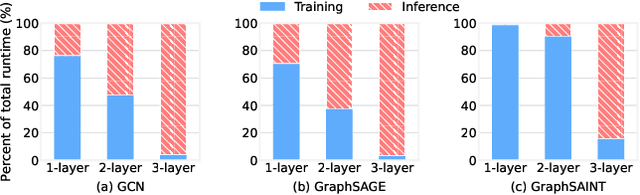
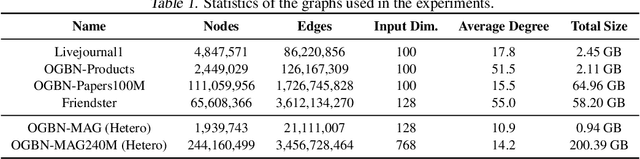
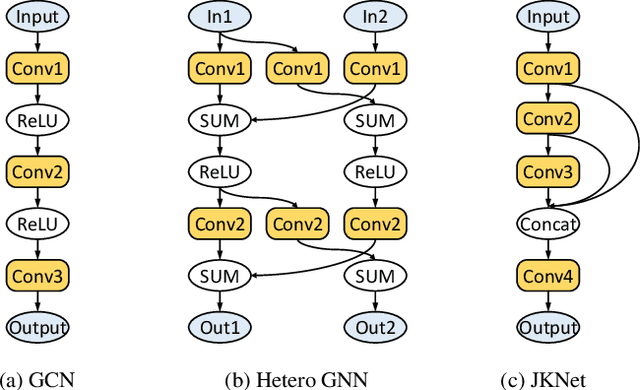
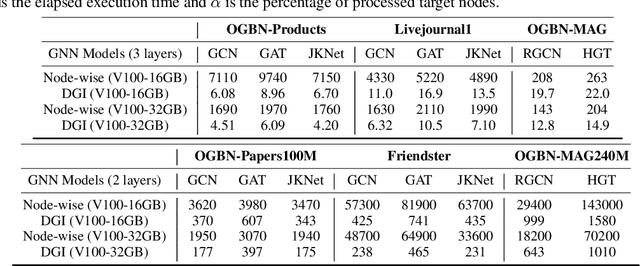
While many systems have been developed to train Graph Neural Networks (GNNs), efficient model inference and evaluation remain to be addressed. For instance, using the widely adopted node-wise approach, model evaluation can account for up to 94% of the time in the end-to-end training process due to neighbor explosion, which means that a node accesses its multi-hop neighbors. On the other hand, layer-wise inference avoids the neighbor explosion problem by conducting inference layer by layer such that the nodes only need their one-hop neighbors in each layer. However, implementing layer-wise inference requires substantial engineering efforts because users need to manually decompose a GNN model into layers for computation and split workload into batches to fit into device memory. In this paper, we develop Deep Graph Inference (DGI) -- a system for easy and efficient GNN model inference, which automatically translates the training code of a GNN model for layer-wise execution. DGI is general for various GNN models and different kinds of inference requests, and supports out-of-core execution on large graphs that cannot fit in CPU memory. Experimental results show that DGI consistently outperforms layer-wise inference across different datasets and hardware settings, and the speedup can be over 1,000x.
On the Effective Usage of Priors in RSS-based Localization
Nov 28, 2022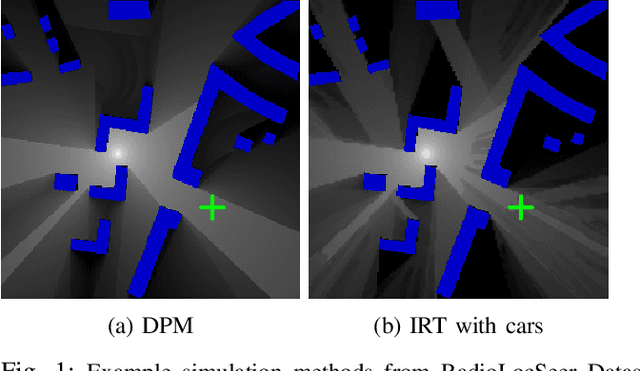
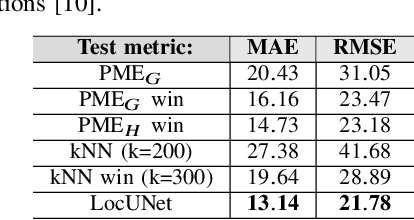
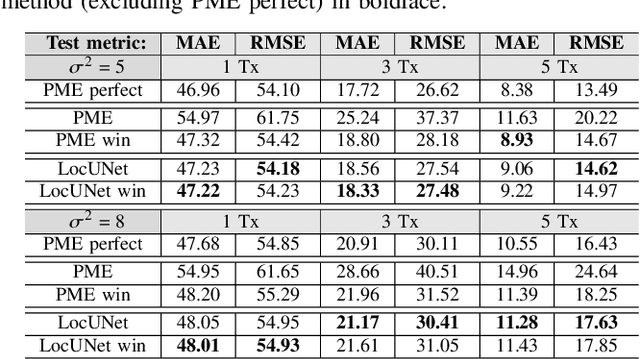
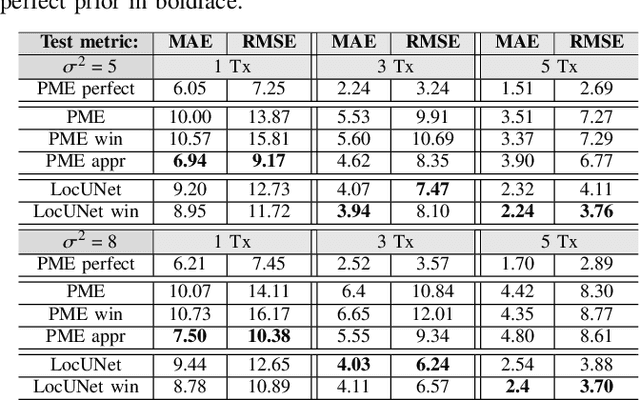
In this paper, we study the localization problem in dense urban settings. In such environments, Global Navigation Satellite Systems fail to provide good accuracy due to low likelihood of line-of-sight (LOS) links between the receiver (Rx) to be located and the satellites, due to the presence of obstacles like the buildings. Thus, one has to resort to other technologies, which can reliably operate under non-line-of-sight (NLOS) conditions. Recently, we proposed a Received Signal Strength (RSS) fingerprint and convolutional neural network-based algorithm, LocUNet, and demonstrated its state-of-the-art localization performance with respect to the widely adopted k-nearest neighbors (kNN) algorithm, and to state-of-the-art time of arrival (ToA) ranging-based methods. In the current work, we first recognize LocUNet's ability to learn the underlying prior distribution of the Rx position or Rx and transmitter (Tx) association preferences from the training data, and attribute its high performance to these. Conversely, we demonstrate that classical methods based on probabilistic approach, can greatly benefit from an appropriate incorporation of such prior information. Our studies also numerically prove LocUNet's close to optimal performance in many settings, by comparing it with the theoretically optimal formulations.
Superpoint Transformer for 3D Scene Instance Segmentation
Nov 28, 2022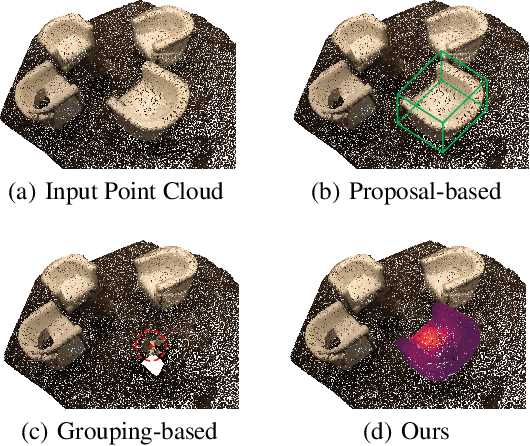
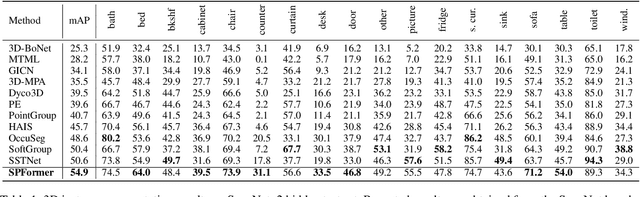
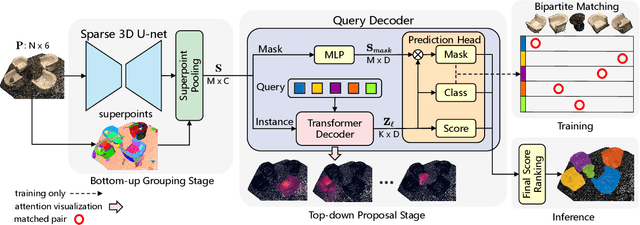
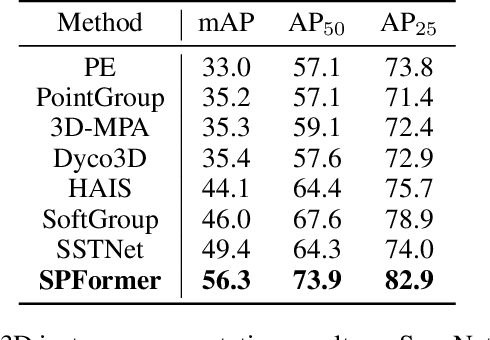
Most existing methods realize 3D instance segmentation by extending those models used for 3D object detection or 3D semantic segmentation. However, these non-straightforward methods suffer from two drawbacks: 1) Imprecise bounding boxes or unsatisfactory semantic predictions limit the performance of the overall 3D instance segmentation framework. 2) Existing method requires a time-consuming intermediate step of aggregation. To address these issues, this paper proposes a novel end-to-end 3D instance segmentation method based on Superpoint Transformer, named as SPFormer. It groups potential features from point clouds into superpoints, and directly predicts instances through query vectors without relying on the results of object detection or semantic segmentation. The key step in this framework is a novel query decoder with transformers that can capture the instance information through the superpoint cross-attention mechanism and generate the superpoint masks of the instances. Through bipartite matching based on superpoint masks, SPFormer can implement the network training without the intermediate aggregation step, which accelerates the network. Extensive experiments on ScanNetv2 and S3DIS benchmarks verify that our method is concise yet efficient. Notably, SPFormer exceeds compared state-of-the-art methods by 4.3% on ScanNetv2 hidden test set in terms of mAP and keeps fast inference speed (247ms per frame) simultaneously. Code is available at https://github.com/sunjiahao1999/SPFormer.
SolderNet: Towards Trustworthy Visual Inspection of Solder Joints in Electronics Manufacturing Using Explainable Artificial Intelligence
Nov 18, 2022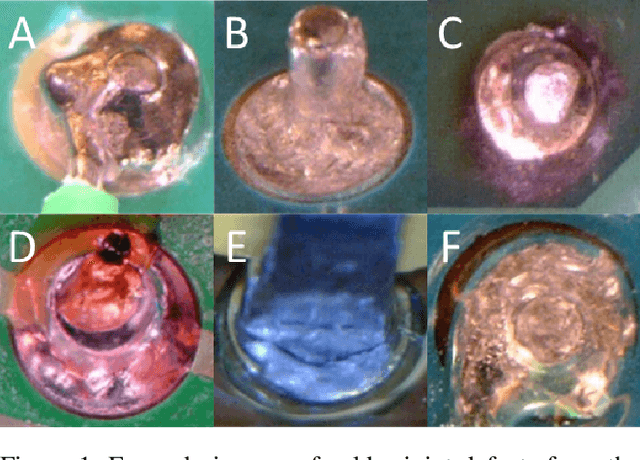
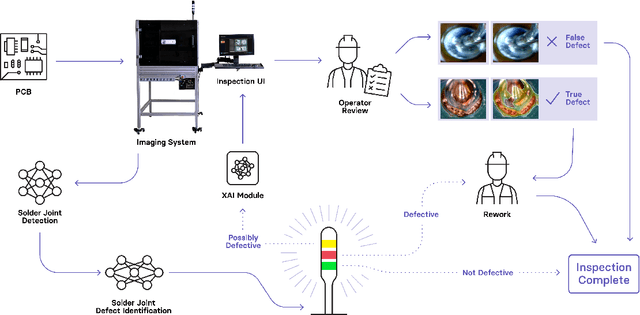
In electronics manufacturing, solder joint defects are a common problem affecting a variety of printed circuit board components. To identify and correct solder joint defects, the solder joints on a circuit board are typically inspected manually by trained human inspectors, which is a very time-consuming and error-prone process. To improve both inspection efficiency and accuracy, in this work we describe an explainable deep learning-based visual quality inspection system tailored for visual inspection of solder joints in electronics manufacturing environments. At the core of this system is an explainable solder joint defect identification system called SolderNet which we design and implement with trust and transparency in mind. While several challenges remain before the full system can be developed and deployed, this study presents important progress towards trustworthy visual inspection of solder joints in electronics manufacturing.
Discovering Locally Maximal Bipartite Subgraphs
Nov 18, 2022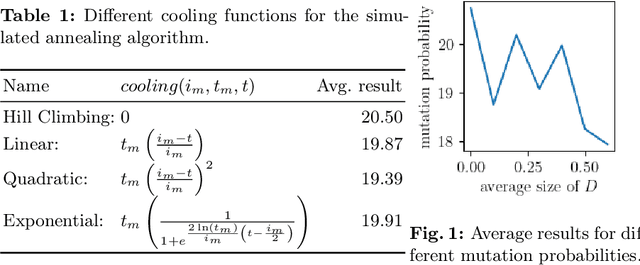

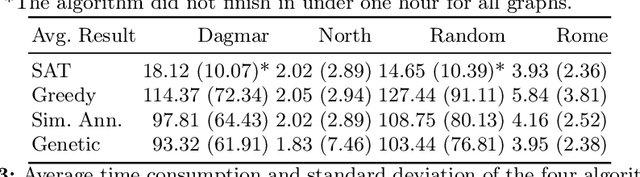

Induced bipartite subgraphs of maximal vertex cardinality are an essential concept for the analysis of graphs. Yet, discovering them in large graphs is known to be computationally hard. Therefore, we consider in this work a weaker notion of this problem, where we discard the maximality constraint in favor of inclusion maximality. Thus, we aim to discover locally maximal bipartite subgraphs. For this, we present three heuristic approaches to extract such subgraphs and compare their results to the solutions of the global problem. For the latter, we employ the algorithmic strength of fast SAT-solvers. Our three proposed heuristics are based on a greedy strategy, a simulated annealing approach, and a genetic algorithm, respectively. We evaluate all four algorithms with respect to their time requirement and the vertex cardinality of the discovered bipartite subgraphs on several benchmark datasets
Taming Hyperparameter Tuning in Continuous Normalizing Flows Using the JKO Scheme
Nov 30, 2022
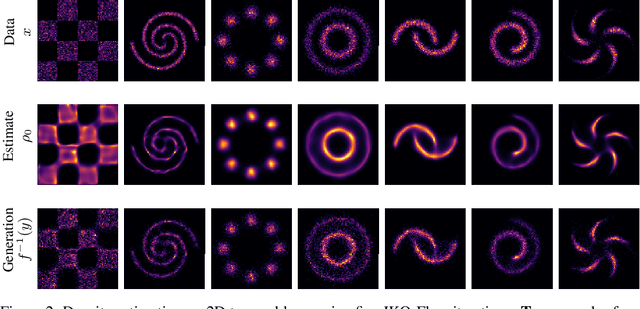

A normalizing flow (NF) is a mapping that transforms a chosen probability distribution to a normal distribution. Such flows are a common technique used for data generation and density estimation in machine learning and data science. The density estimate obtained with a NF requires a change of variables formula that involves the computation of the Jacobian determinant of the NF transformation. In order to tractably compute this determinant, continuous normalizing flows (CNF) estimate the mapping and its Jacobian determinant using a neural ODE. Optimal transport (OT) theory has been successfully used to assist in finding CNFs by formulating them as OT problems with a soft penalty for enforcing the standard normal distribution as a target measure. A drawback of OT-based CNFs is the addition of a hyperparameter, $\alpha$, that controls the strength of the soft penalty and requires significant tuning. We present JKO-Flow, an algorithm to solve OT-based CNF without the need of tuning $\alpha$. This is achieved by integrating the OT CNF framework into a Wasserstein gradient flow framework, also known as the JKO scheme. Instead of tuning $\alpha$, we repeatedly solve the optimization problem for a fixed $\alpha$ effectively performing a JKO update with a time-step $\alpha$. Hence we obtain a "divide and conquer" algorithm by repeatedly solving simpler problems instead of solving a potentially harder problem with large $\alpha$.
How to Train an Accurate and Efficient Object Detection Model on Any Dataset
Nov 30, 2022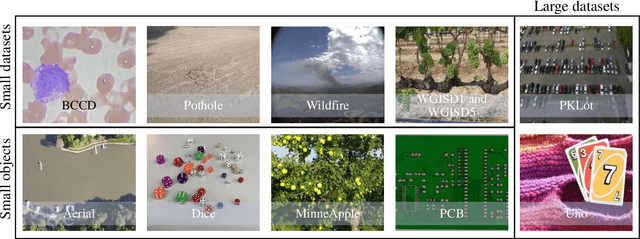
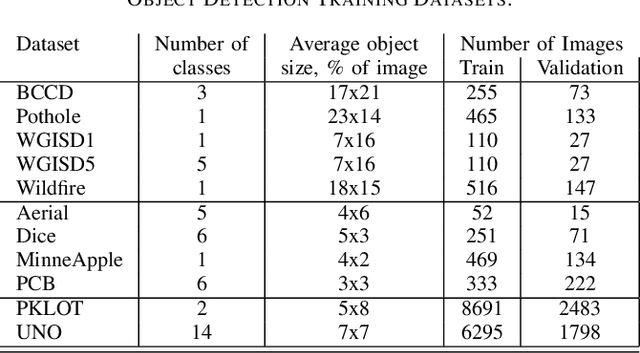
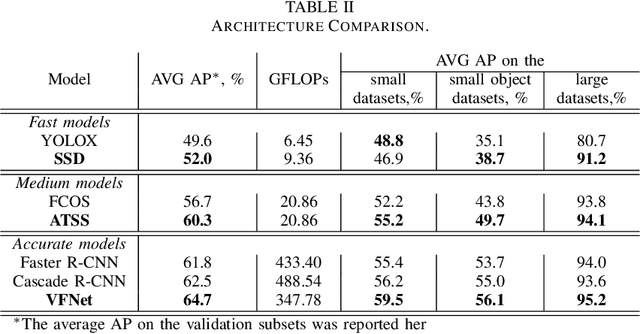
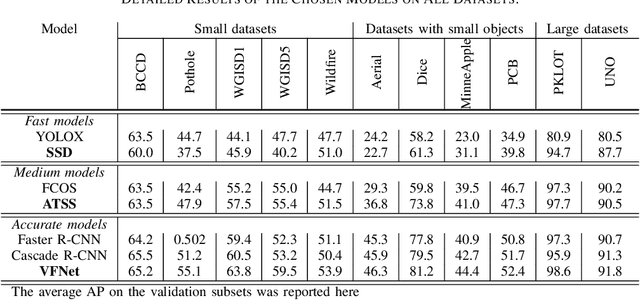
The rapidly evolving industry demands high accuracy of the models without the need for time-consuming and computationally expensive experiments required for fine-tuning. Moreover, a model and training pipeline, which was once carefully optimized for a specific dataset, rarely generalizes well to training on a different dataset. This makes it unrealistic to have carefully fine-tuned models for each use case. To solve this, we propose an alternative approach that also forms a backbone of Intel Geti platform: a dataset-agnostic template for object detection trainings, consisting of carefully chosen and pre-trained models together with a robust training pipeline for further training. Our solution works out-of-the-box and provides a strong baseline on a wide range of datasets. It can be used on its own or as a starting point for further fine-tuning for specific use cases when needed. We obtained dataset-agnostic templates by performing parallel training on a corpus of datasets and optimizing the choice of architectures and training tricks with respect to the average results on the whole corpora. We examined a number of architectures, taking into account the performance-accuracy trade-off. Consequently, we propose 3 finalists, VFNet, ATSS, and SSD, that can be deployed on CPU using the OpenVINO toolkit. The source code is available as a part of the OpenVINO Training Extensions (https://github.com/openvinotoolkit/training_extensions}