 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Monitoring Time Series With Missing Values: a Deep Probabilistic Approach
Mar 09, 2022
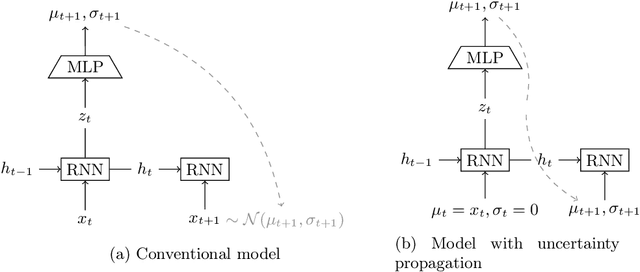
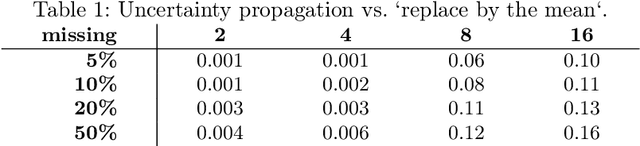
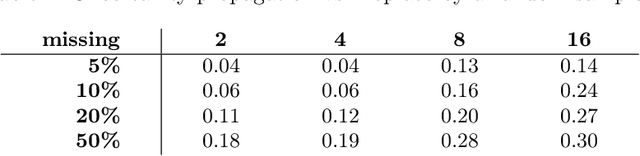
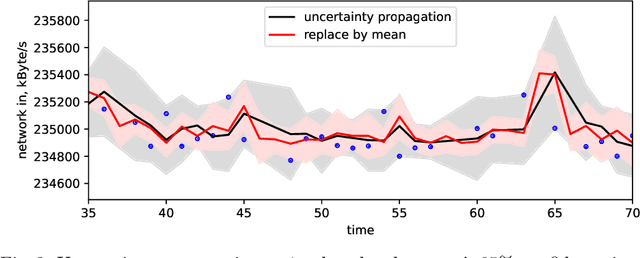
Systems are commonly monitored for health and security through collection and streaming of multivariate time series. Advances in time series forecasting due to adoption of multilayer recurrent neural network architectures make it possible to forecast in high-dimensional time series, and identify and classify novelties early, based on subtle changes in the trends. However, mainstream approaches to multi-variate time series predictions do not handle well cases when the ongoing forecast must include uncertainty, nor they are robust to missing data. We introduce a new architecture for time series monitoring based on combination of state-of-the-art methods of forecasting in high-dimensional time series with full probabilistic handling of uncertainty. We demonstrate advantage of the architecture for time series forecasting and novelty detection, in particular with partially missing data, and empirically evaluate and compare the architecture to state-of-the-art approaches on a real-world data set.
Graph Sequential Neural ODE Process for Link Prediction on Dynamic and Sparse Graphs
Nov 15, 2022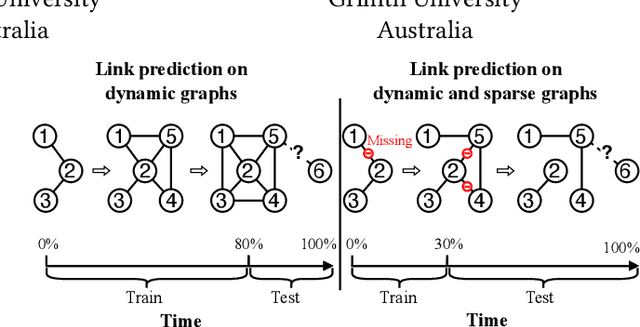

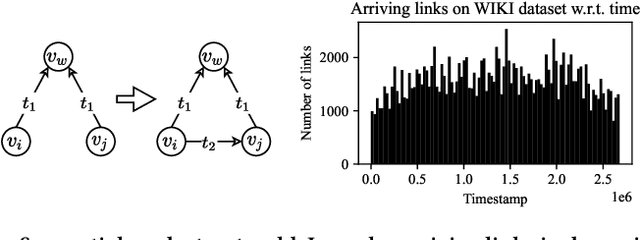
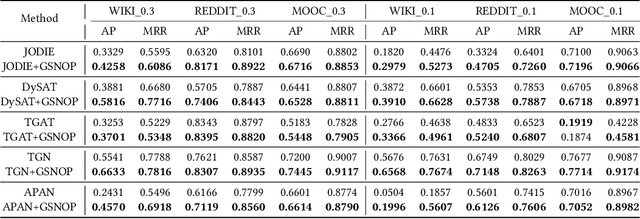
Link prediction on dynamic graphs is an important task in graph mining. Existing approaches based on dynamic graph neural networks (DGNNs) typically require a significant amount of historical data (interactions over time), which is not always available in practice. The missing links over time, which is a common phenomenon in graph data, further aggravates the issue and thus creates extremely sparse and dynamic graphs. To address this problem, we propose a novel method based on the neural process, called Graph Sequential Neural ODE Process (GSNOP). Specifically, GSNOP combines the advantage of the neural process and neural ordinary differential equation that models the link prediction on dynamic graphs as a dynamic-changing stochastic process. By defining a distribution over functions, GSNOP introduces the uncertainty into the predictions, making it generalize to more situations instead of overfitting to the sparse data. GSNOP is also agnostic to model structures that can be integrated with any DGNN to consider the chronological and geometrical information for link prediction. Extensive experiments on three dynamic graph datasets show that GSNOP can significantly improve the performance of existing DGNNs and outperform other neural process variants.
A Sahlqvist-style Correspondence Theorem for Linear-time Temporal Logic
Jun 13, 2022The language of modal logic is capable of expressing first-order conditions on Kripke frames. The classic result by Henrik Sahlqvist identifies a significant class of modal formulas for which first-order conditions -- or Sahlqvist correspondents -- can be find in an effective, algorithmic way. Recent works have successfully extended this classic result to more complex modal languages. In this paper, we pursue a similar line and develop a Sahlqvist-style correspondence theorem for Linear-time Temporal Logic (LTL), which is one of the most widely used formal languages for temporal specification. LTL extends the syntax of basic modal logic with dedicated temporal operators Next X and Until U . As a result, the complexity of the class of formulas that have first-order correspondents also increases accordingly. In this paper, we identify a significant class of LTL Sahlqvist formulas built by using modal operators F , G, X, and U . The main result of this paper is to prove the correspondence of LTL Sahlqvist formulas to frame conditions that are definable in first-order language.
Path Planning Problem under non-probabilistic Uncertainty
Dec 01, 2022This paper considers theoretical solutions for path planning problems under non-probabilistic uncertainty used in the travel salesman problems under uncertainty. The uncertainty is on the paths between the cities as nodes in a travelling salesman problem. There is at least one path between two nodes/stations where the travelling time between the nodes is not precisely known. This could be due to environmental effects like crowdedness (rush period) in the path, the state of the charge of batteries, weather conditions, or considering the safety of the route while travelling. In this work, we consider two different advanced uncertainty models (i) probabilistic-precise uncertain model: Probability distributions and (ii) non-probabilistic--imprecise uncertain model: Intervals. We investigate what theoretical results can be obtained for two different optimality criteria: maximinity and maximality in the travelling salesman problem.
Single-shot Foothold Selection and Constraint Evaluation for Quadruped Locomotion
Dec 01, 2022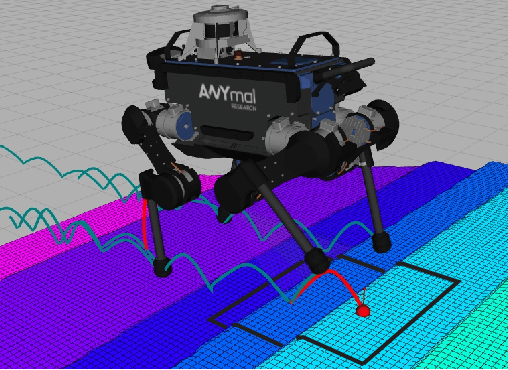
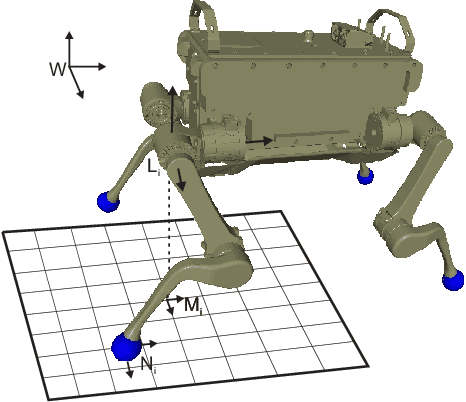
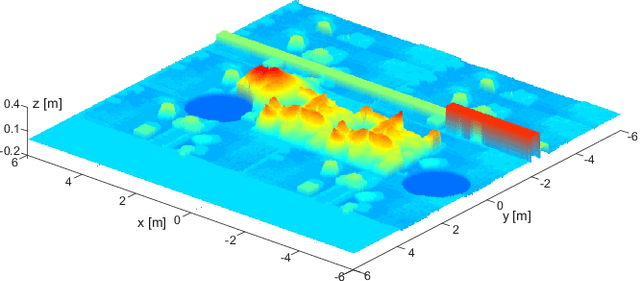
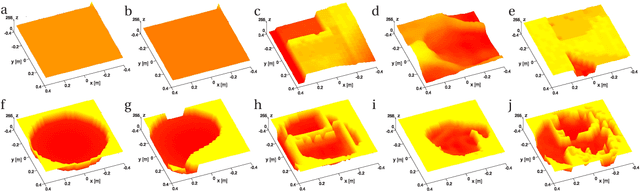
In this paper, we propose a method for selecting the optimal footholds for legged systems. The goal of the proposed method is to find the best foothold for the swing leg on a local elevation map. We apply the Convolutional Neural Network to learn the relationship between the local elevation map and the quality of potential footholds. The proposed network evaluates the geometrical characteristics of each cell on the elevation map, checks kinematic constraints and collisions. During execution time, the controller obtains the qualitative measurement of each potential foothold from the neural model. This method allows to evaluate hundreds of potential footholds and check multiple constraints in a single step which takes 10~ms on a standard computer without GPGPU. The experiments were carried out on a quadruped robot walking over rough terrain in both simulation and real robotic platforms.
Unsupervised Echocardiography Registration through Patch-based MLPs and Transformers
Nov 21, 2022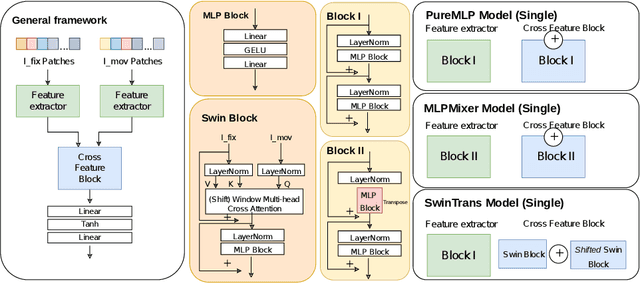
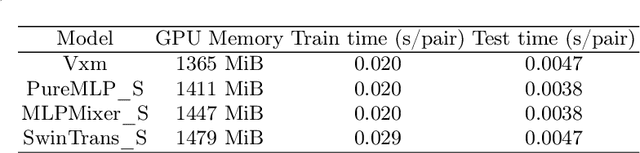
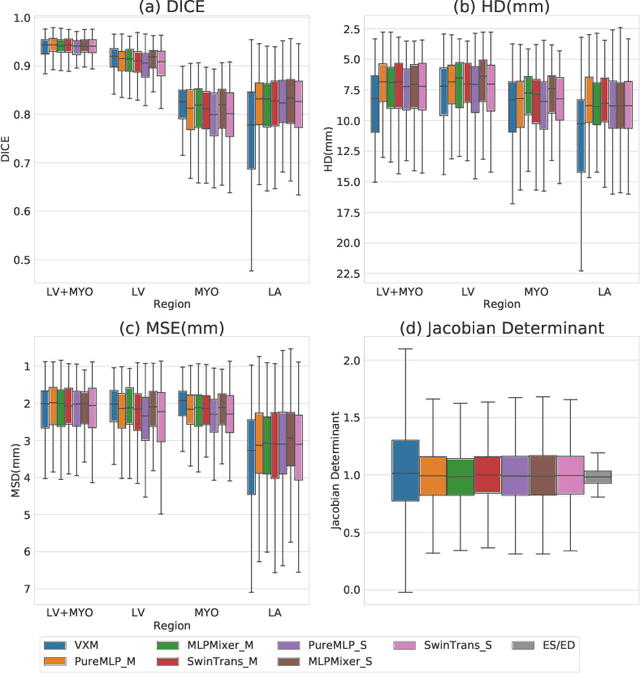
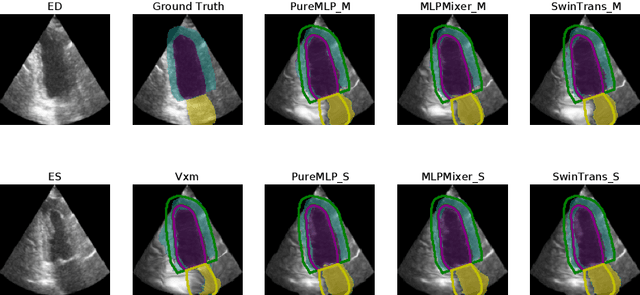
Image registration is an essential but challenging task in medical image computing, especially for echocardiography, where the anatomical structures are relatively noisy compared to other imaging modalities. Traditional (non-learning) registration approaches rely on the iterative optimization of a similarity metric which is usually costly in time complexity. In recent years, convolutional neural network (CNN) based image registration methods have shown good effectiveness. In the meantime, recent studies show that the attention-based model (e.g., Transformer) can bring superior performance in pattern recognition tasks. In contrast, whether the superior performance of the Transformer comes from the long-winded architecture or is attributed to the use of patches for dividing the inputs is unclear yet. This work introduces three patch-based frameworks for image registration using MLPs and transformers. We provide experiments on 2D-echocardiography registration to answer the former question partially and provide a benchmark solution. Our results on a large public 2D echocardiography dataset show that the patch-based MLP/Transformer model can be effectively used for unsupervised echocardiography registration. They demonstrate comparable and even better registration performance than a popular CNN registration model. In particular, patch-based models better preserve volume changes in terms of Jacobian determinants, thus generating robust registration fields with less unrealistic deformation. Our results demonstrate that patch-based learning methods, whether with attention or not, can perform high-performance unsupervised registration tasks with adequate time and space complexity. Our codes are available https://gitlab.inria.fr/epione/mlp\_transformer\_registration
Adversarial Artifact Detection in EEG-Based Brain-Computer Interfaces
Nov 28, 2022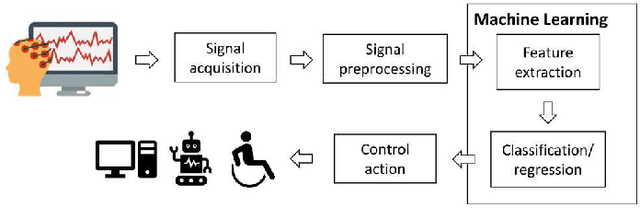
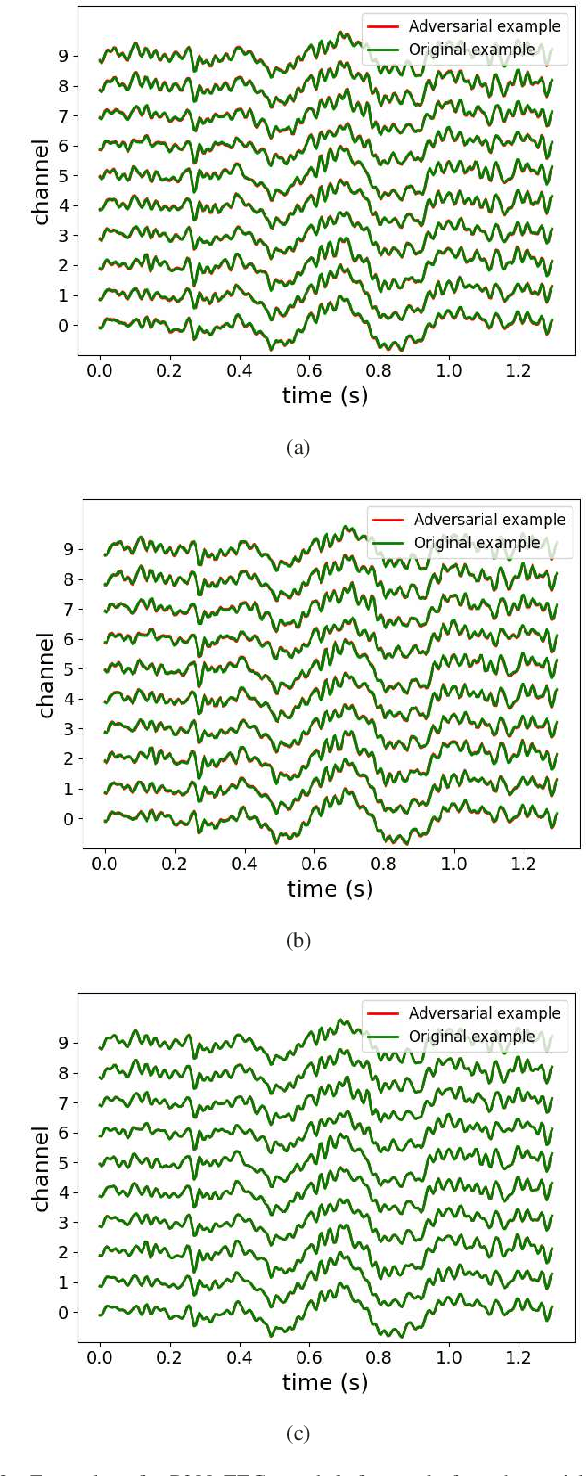
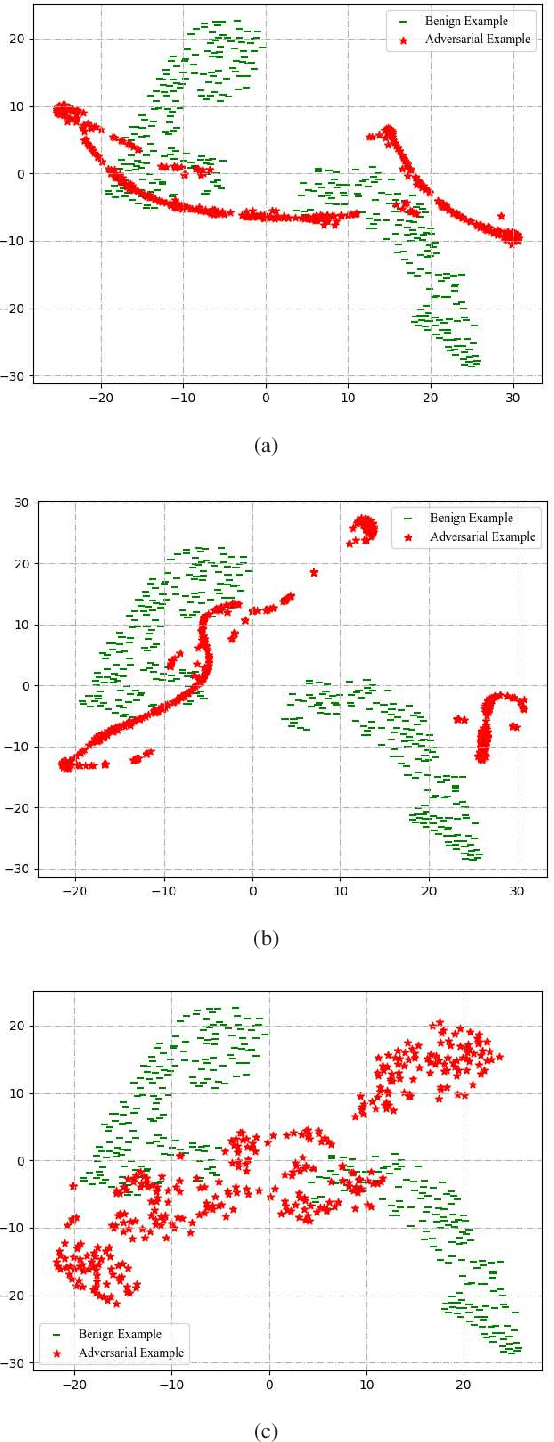
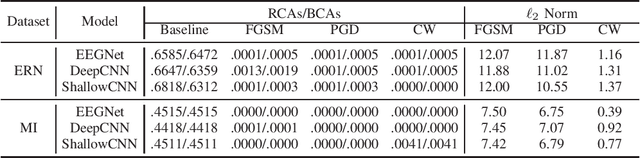
Machine learning has achieved great success in electroencephalogram (EEG) based brain-computer interfaces (BCIs). Most existing BCI research focused on improving its accuracy, but few had considered its security. Recent studies, however, have shown that EEG-based BCIs are vulnerable to adversarial attacks, where small perturbations added to the input can cause misclassification. Detection of adversarial examples is crucial to both the understanding of this phenomenon and the defense. This paper, for the first time, explores adversarial detection in EEG-based BCIs. Experiments on two EEG datasets using three convolutional neural networks were performed to verify the performances of multiple detection approaches. We showed that both white-box and black-box attacks can be detected, and the former are easier to detect.
UAVs for Industries and Supply Chain Management
Dec 06, 2022
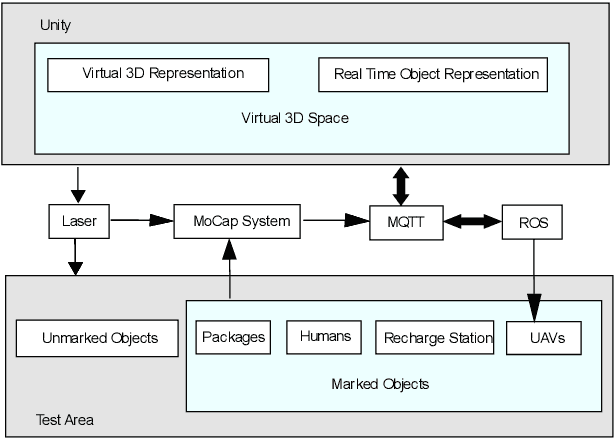
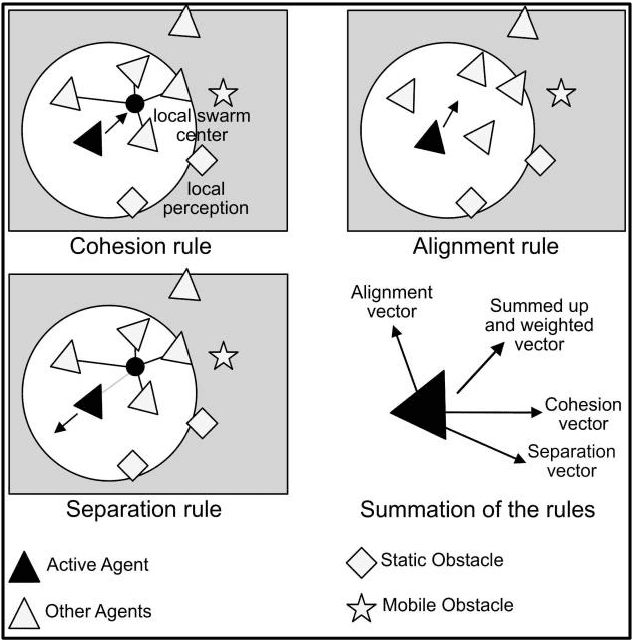
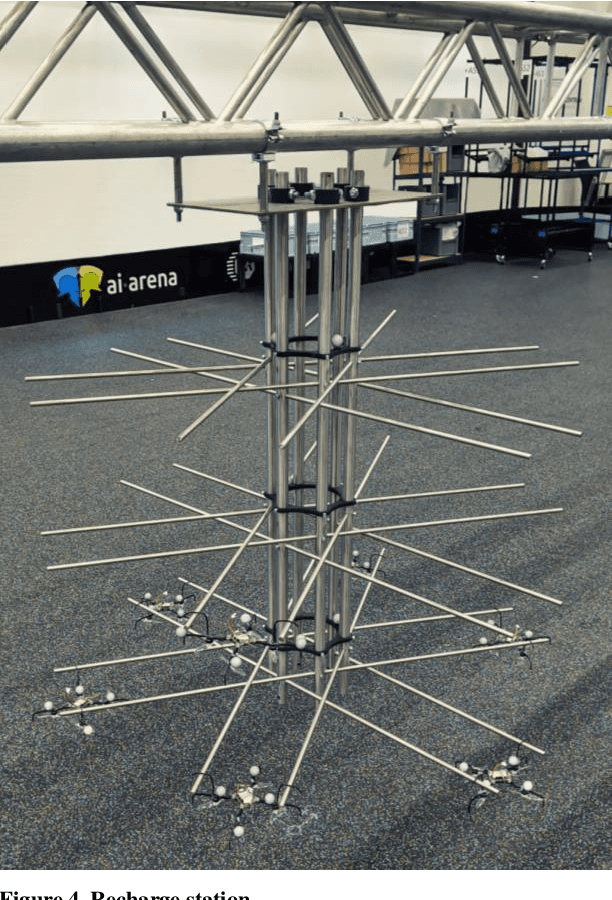
This work aims at showing that it is feasible and safe to use a swarm of Unmanned Aerial Vehicles (UAVs) indoors alongside humans. UAVs are increasingly being integrated under the Industry 4.0 framework. UAV swarms are primarily deployed outdoors in civil and military applications, but the opportunities for using them in manufacturing and supply chain management are immense. There is extensive research on UAV technology, e.g., localization, control, and computer vision, but less research on the practical application of UAVs in industry. UAV technology could improve data collection and monitoring, enhance decision-making in an Internet of Things framework and automate time-consuming and redundant tasks in the industry. However, there is a gap between the technological developments of UAVs and their integration into the supply chain. Therefore, this work focuses on automating the task of transporting packages utilizing a swarm of small UAVs operating alongside humans. MoCap system, ROS, and unity are used for localization, inter-process communication and visualization. Multiple experiments are performed with the UAVs in wander and swarm mode in a warehouse like environment.
Multi-Task Edge Prediction in Temporally-Dynamic Video Graphs
Dec 06, 2022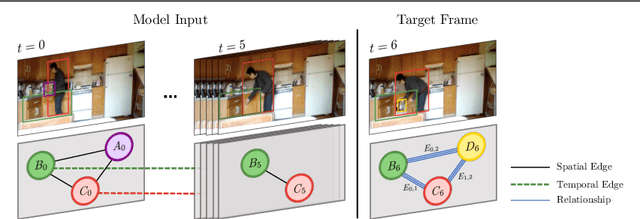
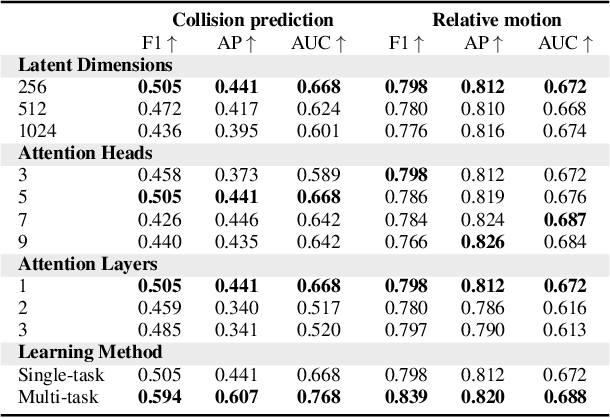
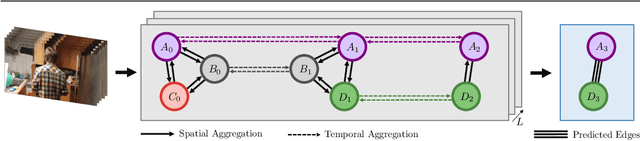
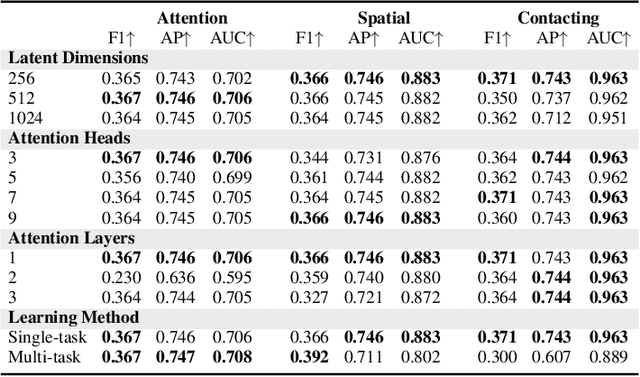
Graph neural networks have shown to learn effective node representations, enabling node-, link-, and graph-level inference. Conventional graph networks assume static relations between nodes, while relations between entities in a video often evolve over time, with nodes entering and exiting dynamically. In such temporally-dynamic graphs, a core problem is inferring the future state of spatio-temporal edges, which can constitute multiple types of relations. To address this problem, we propose MTD-GNN, a graph network for predicting temporally-dynamic edges for multiple types of relations. We propose a factorized spatio-temporal graph attention layer to learn dynamic node representations and present a multi-task edge prediction loss that models multiple relations simultaneously. The proposed architecture operates on top of scene graphs that we obtain from videos through object detection and spatio-temporal linking. Experimental evaluations on ActionGenome and CLEVRER show that modeling multiple relations in our temporally-dynamic graph network can be mutually beneficial, outperforming existing static and spatio-temporal graph neural networks, as well as state-of-the-art predicate classification methods.
A Light-weight, Effective and Efficient Model for Label Aggregation in Crowdsourcing
Nov 19, 2022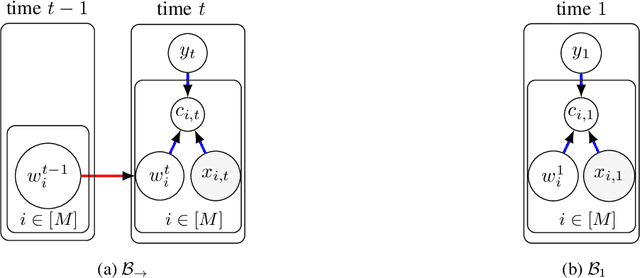
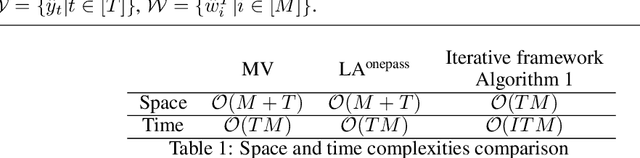
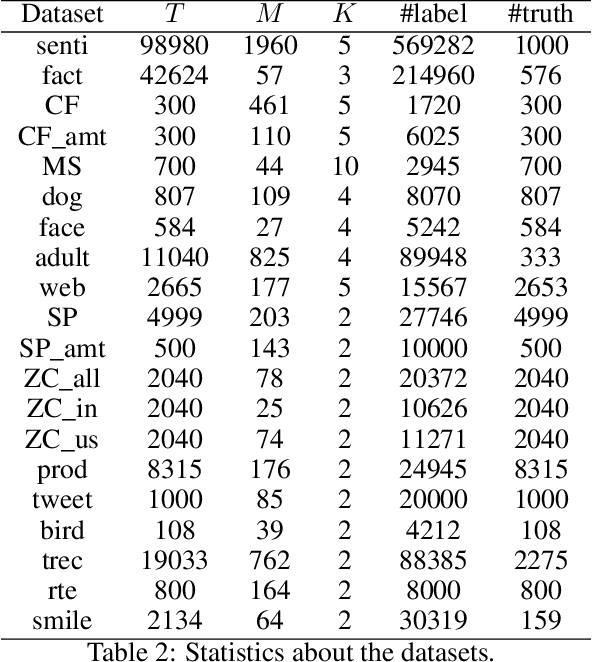
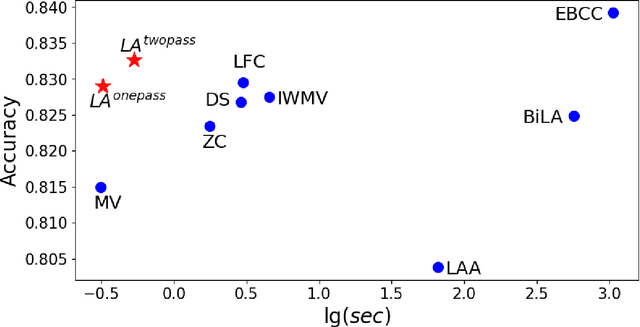
Due to the noises in crowdsourced labels, label aggregation (LA) has emerged as a standard procedure to post-process crowdsourced labels. LA methods estimate true labels from crowdsourced labels by modeling worker qualities. Most existing LA methods are iterative in nature. They need to traverse all the crowdsourced labels multiple times in order to jointly and iteratively update true labels and worker qualities until convergence. Consequently, these methods have high space and time complexities. In this paper, we treat LA as a dynamic system and model it as a Dynamic Bayesian network. From the dynamic model we derive two light-weight algorithms, LA\textsuperscript{onepass} and LA\textsuperscript{twopass}, which can effectively and efficiently estimate worker qualities and true labels by traversing all the labels at most twice. Due to the dynamic nature, the proposed algorithms can also estimate true labels online without re-visiting historical data. We theoretically prove the convergence property of the proposed algorithms, and bound the error of estimated worker qualities. We also analyze the space and time complexities of the proposed algorithms and show that they are equivalent to those of majority voting. Experiments conducted on 20 real-world datasets demonstrate that the proposed algorithms can effectively and efficiently aggregate labels in both offline and online settings even if they traverse all the labels at most twice.