 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Symphony in the Latent Space: Provably Integrating High-dimensional Techniques with Non-linear Machine Learning Models
Dec 01, 2022
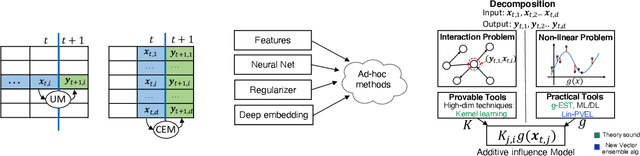
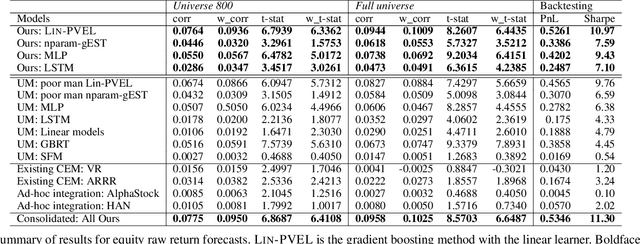
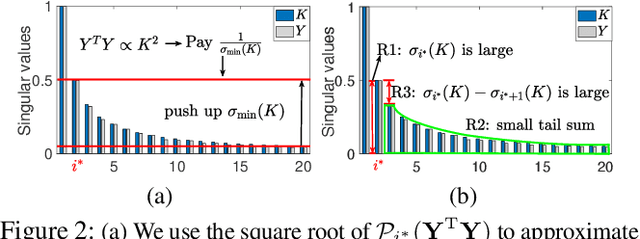
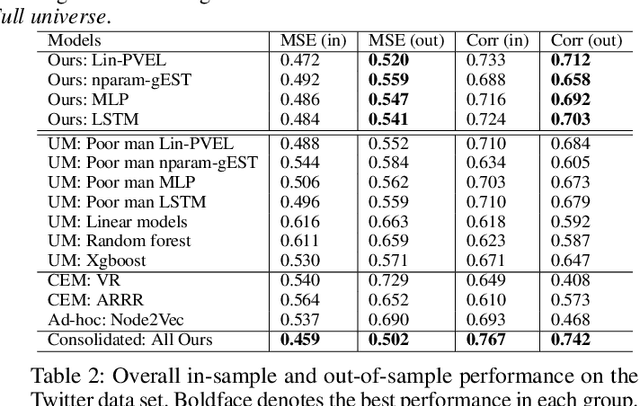
This paper revisits building machine learning algorithms that involve interactions between entities, such as those between financial assets in an actively managed portfolio, or interactions between users in a social network. Our goal is to forecast the future evolution of ensembles of multivariate time series in such applications (e.g., the future return of a financial asset or the future popularity of a Twitter account). Designing ML algorithms for such systems requires addressing the challenges of high-dimensional interactions and non-linearity. Existing approaches usually adopt an ad-hoc approach to integrating high-dimensional techniques into non-linear models and recent studies have shown these approaches have questionable efficacy in time-evolving interacting systems. To this end, we propose a novel framework, which we dub as the additive influence model. Under our modeling assumption, we show that it is possible to decouple the learning of high-dimensional interactions from the learning of non-linear feature interactions. To learn the high-dimensional interactions, we leverage kernel-based techniques, with provable guarantees, to embed the entities in a low-dimensional latent space. To learn the non-linear feature-response interactions, we generalize prominent machine learning techniques, including designing a new statistically sound non-parametric method and an ensemble learning algorithm optimized for vector regressions. Extensive experiments on two common applications demonstrate that our new algorithms deliver significantly stronger forecasting power compared to standard and recently proposed methods.
* 24 pages
HDC-MiniROCKET: Explicit Time Encoding in Time Series Classification with Hyperdimensional Computing
Feb 16, 2022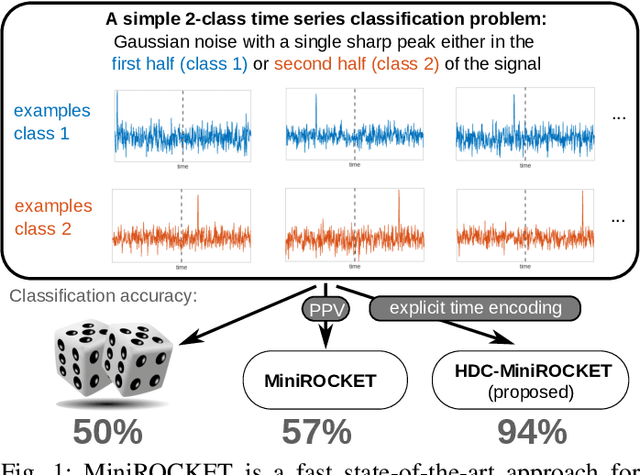
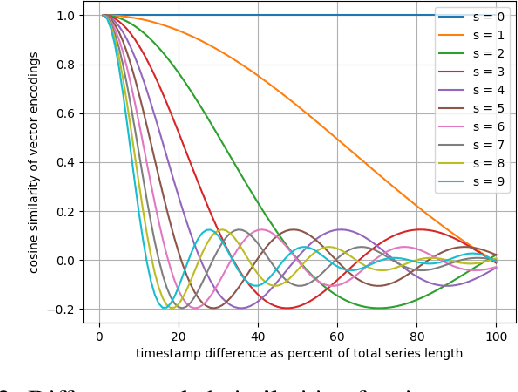
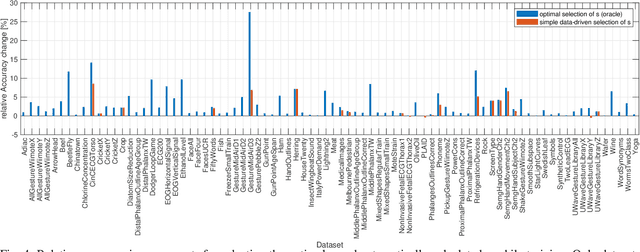
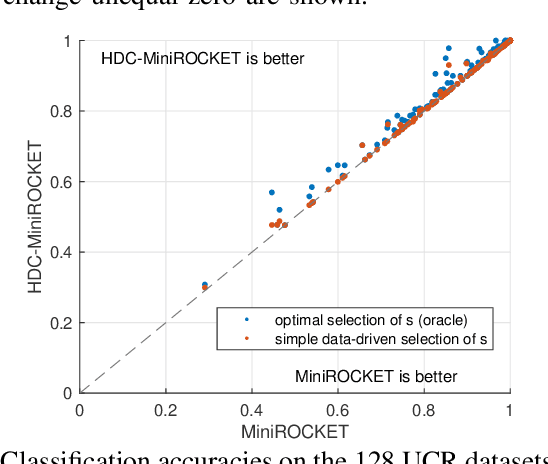
Classification of time series data is an important task for many application domains. One of the best existing methods for this task, in terms of accuracy and computation time, is MiniROCKET. In this work, we extend this approach to provide better global temporal encodings using hyperdimensional computing (HDC) mechanisms. HDC (also known as Vector Symbolic Architectures, VSA) is a general method to explicitly represent and process information in high-dimensional vectors. It has previously been used successfully in combination with deep neural networks and other signal processing algorithms. We argue that the internal high-dimensional representation of MiniROCKET is well suited to be complemented by the algebra of HDC. This leads to a more general formulation, HDC-MiniROCKET, where the original algorithm is only a special case. We will discuss and demonstrate that HDC-MiniROCKET can systematically overcome catastrophic failures of MiniROCKET on simple synthetic datasets. These results are confirmed by experiments on the 128 datasets from the UCR time series classification benchmark. The extension with HDC can achieve considerably better results on datasets with high temporal dependence without increasing the computational effort for inference.
Accelerated Continuous-Time Approximate Dynamic Programming via Data-Assisted Hybrid Control
Apr 27, 2022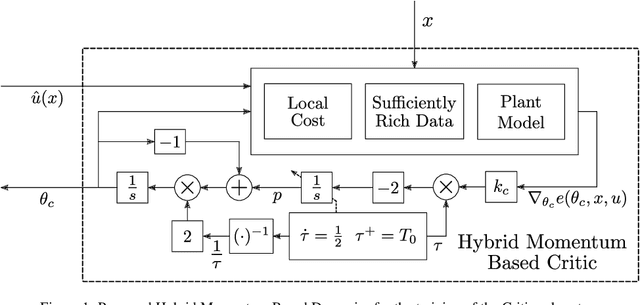
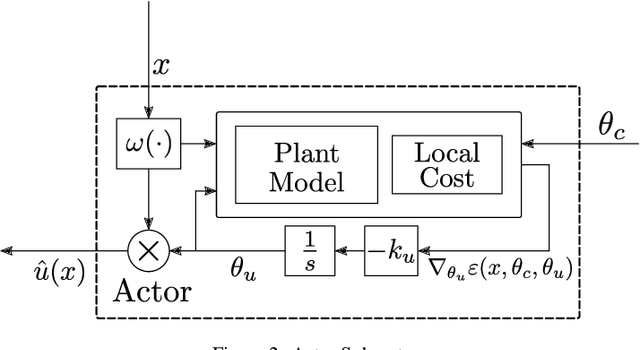
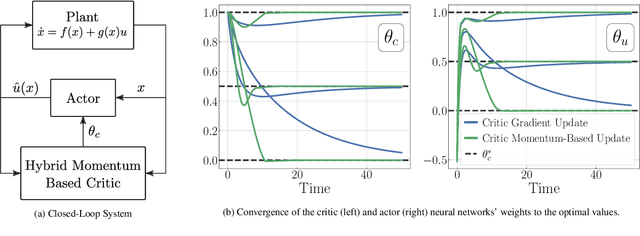
We introduce a new closed-loop architecture for the online solution of approximate optimal control problems in the context of continuous-time systems. Specifically, we introduce the first algorithm that incorporates dynamic momentum in actor-critic structures to control continuous-time dynamic plants with an affine structure in the input. By incorporating dynamic momentum in our algorithm, we are able to accelerate the convergence properties of the closed-loop system, achieving superior transient performance compared to traditional gradient-descent based techniques. In addition, by leveraging the existence of past recorded data with sufficiently rich information properties, we dispense with the persistence of excitation condition traditionally imposed on the regressors of the critic and the actor. Given that our continuous-time momentum-based dynamics also incorporate periodic discrete-time resets that emulate restarting techniques used in the machine learning literature, we leverage tools from hybrid dynamical systems theory to establish asymptotic stability properties for the closed-loop system. We illustrate our results with a numerical example.
Time-of-Day Neural Style Transfer for Architectural Photographs
Sep 13, 2022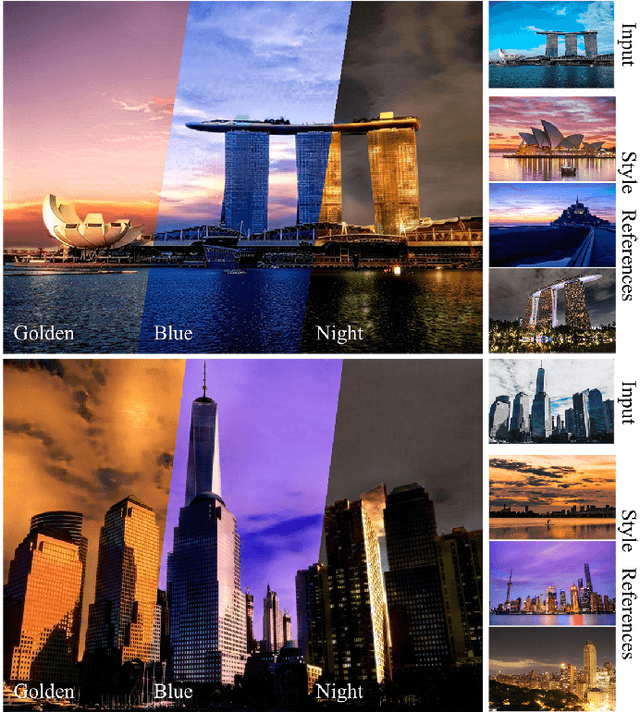

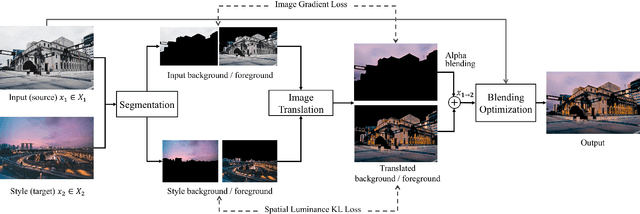

Architectural photography is a genre of photography that focuses on capturing a building or structure in the foreground with dramatic lighting in the background. Inspired by recent successes in image-to-image translation methods, we aim to perform style transfer for architectural photographs. However, the special composition in architectural photography poses great challenges for style transfer in this type of photographs. Existing neural style transfer methods treat the architectural images as a single entity, which would generate mismatched chrominance and destroy geometric features of the original architecture, yielding unrealistic lighting, wrong color rendition, and visual artifacts such as ghosting, appearance distortion, or color mismatching. In this paper, we specialize a neural style transfer method for architectural photography. Our method addresses the composition of the foreground and background in an architectural photograph in a two-branch neural network that separately considers the style transfer of the foreground and the background, respectively. Our method comprises a segmentation module, a learning-based image-to-image translation module, and an image blending optimization module. We trained our image-to-image translation neural network with a new dataset of unconstrained outdoor architectural photographs captured at different magic times of a day, utilizing additional semantic information for better chrominance matching and geometry preservation. Our experiments show that our method can produce photorealistic lighting and color rendition on both the foreground and background, and outperforms general image-to-image translation and arbitrary style transfer baselines quantitatively and qualitatively. Our code and data are available at https://github.com/hkust-vgd/architectural_style_transfer.
Mixture Manifold Networks: A Computationally Efficient Baseline for Inverse Modeling
Nov 25, 2022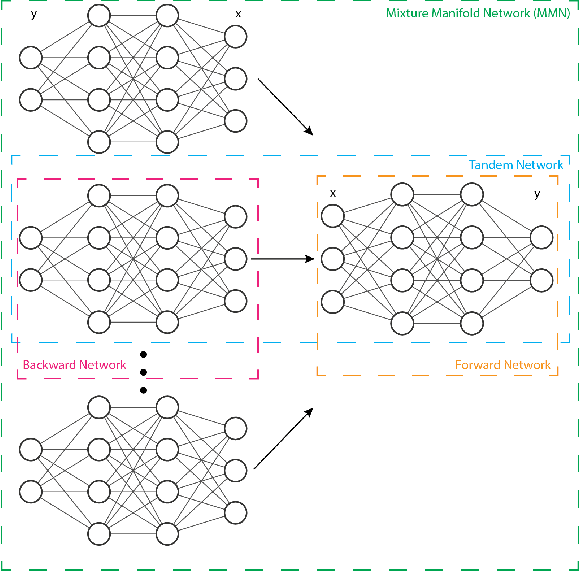
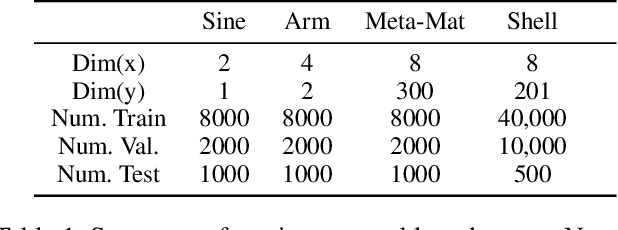
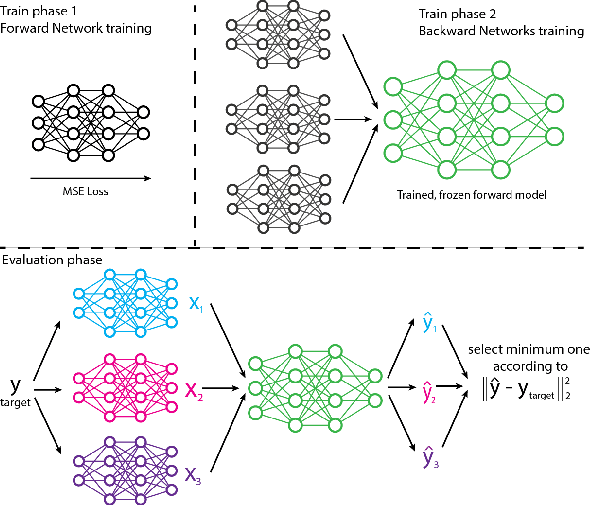
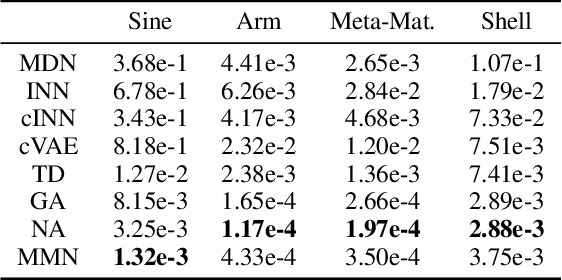
We propose and show the efficacy of a new method to address generic inverse problems. Inverse modeling is the task whereby one seeks to determine the control parameters of a natural system that produce a given set of observed measurements. Recent work has shown impressive results using deep learning, but we note that there is a trade-off between model performance and computational time. For some applications, the computational time at inference for the best performing inverse modeling method may be overly prohibitive to its use. We present a new method that leverages multiple manifolds as a mixture of backward (e.g., inverse) models in a forward-backward model architecture. These multiple backwards models all share a common forward model, and their training is mitigated by generating training examples from the forward model. The proposed method thus has two innovations: 1) the multiple Manifold Mixture Network (MMN) architecture, and 2) the training procedure involving augmenting backward model training data using the forward model. We demonstrate the advantages of our method by comparing to several baselines on four benchmark inverse problems, and we furthermore provide analysis to motivate its design.
Learnable Blur Kernel for Single-Image Defocus Deblurring in the Wild
Nov 25, 2022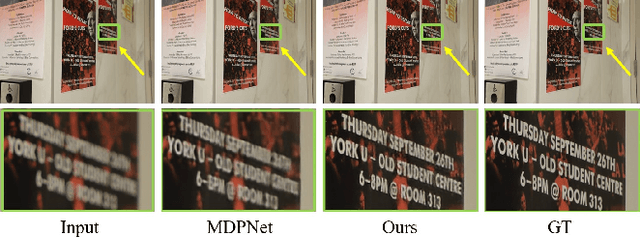
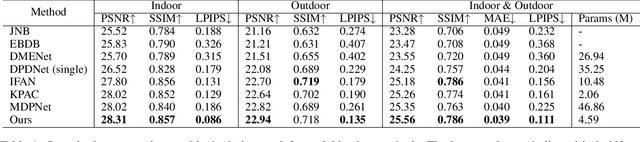
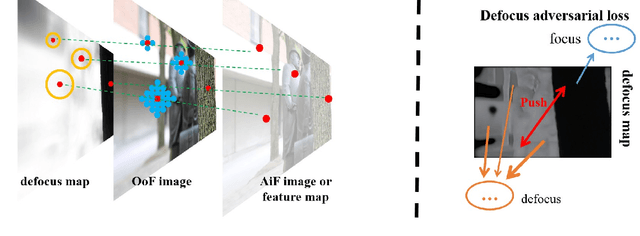
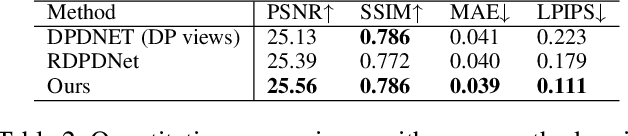
Recent research showed that the dual-pixel sensor has made great progress in defocus map estimation and image defocus deblurring. However, extracting real-time dual-pixel views is troublesome and complex in algorithm deployment. Moreover, the deblurred image generated by the defocus deblurring network lacks high-frequency details, which is unsatisfactory in human perception. To overcome this issue, we propose a novel defocus deblurring method that uses the guidance of the defocus map to implement image deblurring. The proposed method consists of a learnable blur kernel to estimate the defocus map, which is an unsupervised method, and a single-image defocus deblurring generative adversarial network (DefocusGAN) for the first time. The proposed network can learn the deblurring of different regions and recover realistic details. We propose a defocus adversarial loss to guide this training process. Competitive experimental results confirm that with a learnable blur kernel, the generated defocus map can achieve results comparable to supervised methods. In the single-image defocus deblurring task, the proposed method achieves state-of-the-art results, especially significant improvements in perceptual quality, where PSNR reaches 25.56 dB and LPIPS reaches 0.111.
Test-time Recalibration of Conformal Predictors Under Distribution Shift Based on Unlabeled Examples
Oct 09, 2022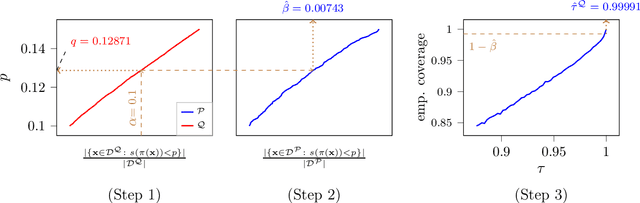
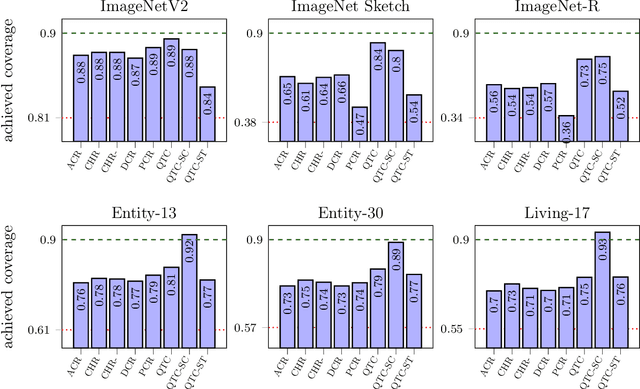
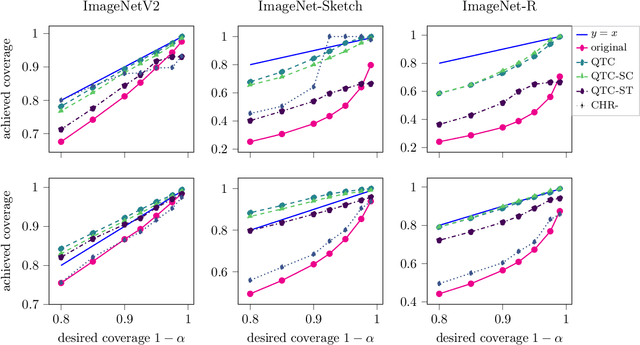
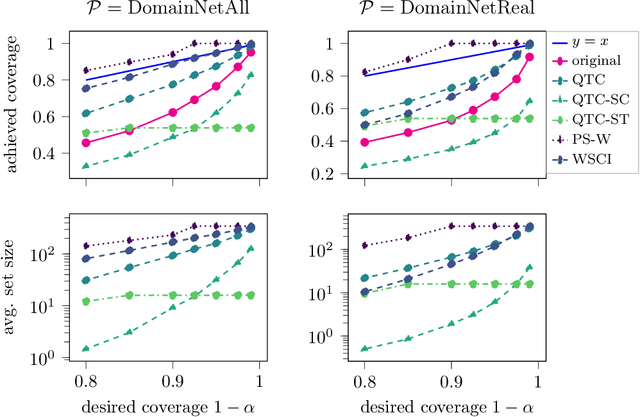
Modern image classifiers achieve high predictive accuracy, but the predictions typically come without reliable uncertainty estimates. Conformal prediction algorithms provide uncertainty estimates by predicting a set of classes based on the probability estimates of the classifier (for example, the softmax scores). To provide such sets, conformal prediction algorithms often rely on estimating a cutoff threshold for the probability estimates, and this threshold is chosen based on a calibration set. Conformal prediction methods guarantee reliability only when the calibration set is from the same distribution as the test set. Therefore, the methods need to be recalibrated for new distributions. However, in practice, labeled data from new distributions is rarely available, making calibration infeasible. In this work, we consider the problem of predicting the cutoff threshold for a new distribution based on unlabeled examples only. While it is impossible in general to guarantee reliability when calibrating based on unlabeled examples, we show that our method provides excellent uncertainty estimates under natural distribution shifts, and provably works for a specific model of a distribution shift.
Reinforcement Learning from Simulation to Real World Autonomous Driving using Digital Twin
Nov 27, 2022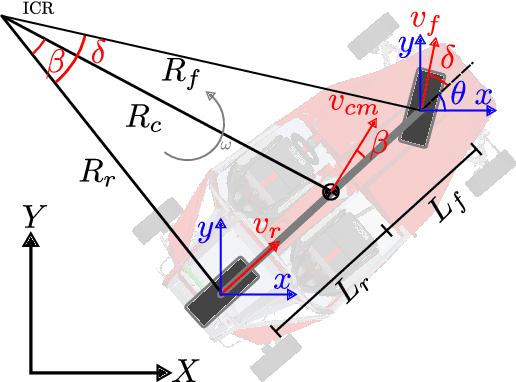
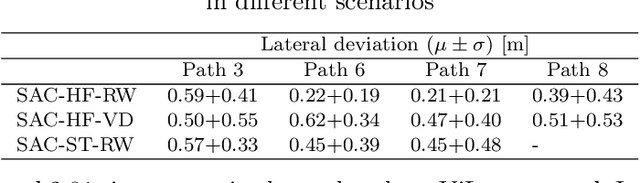
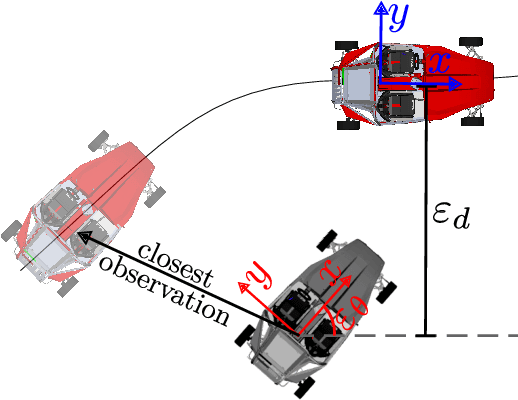
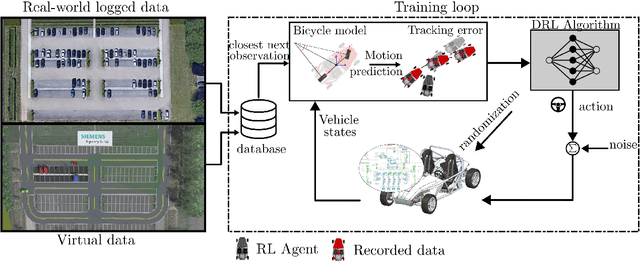
Reinforcement learning (RL) is a promising solution for autonomous vehicles to deal with complex and uncertain traffic environments. The RL training process is however expensive, unsafe, and time consuming. Algorithms are often developed first in simulation and then transferred to the real world, leading to a common sim2real challenge that performance decreases when the domain changes. In this paper, we propose a transfer learning process to minimize the gap by exploiting digital twin technology, relying on a systematic and simultaneous combination of virtual and real world data coming from vehicle dynamics and traffic scenarios. The model and testing environment are evolved from model, hardware to vehicle in the loop and proving ground testing stages, similar to standard development cycle in automotive industry. In particular, we also integrate other transfer learning techniques such as domain randomization and adaptation in each stage. The simulation and real data are gradually incorporated to accelerate and make the transfer learning process more robust. The proposed RL methodology is applied to develop a path following steering controller for an autonomous electric vehicle. After learning and deploying the real-time RL control policy on the vehicle, we obtained satisfactory and safe control performance already from the first deployment, demonstrating the advantages of the proposed digital twin based learning process.
Nonparametric Independent Component Analysis for the Sources with Mixed Spectra
Dec 13, 2022Independent component analysis (ICA) is a blind source separation method to recover source signals of interest from their mixtures. Most existing ICA procedures assume independent sampling. Second-order-statistics-based source separation methods have been developed based on parametric time series models for the mixtures from the autocorrelated sources. However, the second-order-statistics-based methods cannot separate the sources accurately when the sources have temporal autocorrelations with mixed spectra. To address this issue, we propose a new ICA method by estimating spectral density functions and line spectra of the source signals using cubic splines and indicator functions, respectively. The mixed spectra and the mixing matrix are estimated by maximizing the Whittle likelihood function. We illustrate the performance of the proposed method through simulation experiments and an EEG data application. The numerical results indicate that our approach outperforms existing ICA methods, including SOBI algorithms. In addition, we investigate the asymptotic behavior of the proposed method.
Despite "super-human" performance, current LLMs are unsuited for decisions about ethics and safety
Dec 13, 2022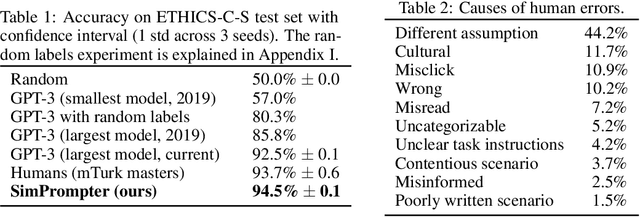
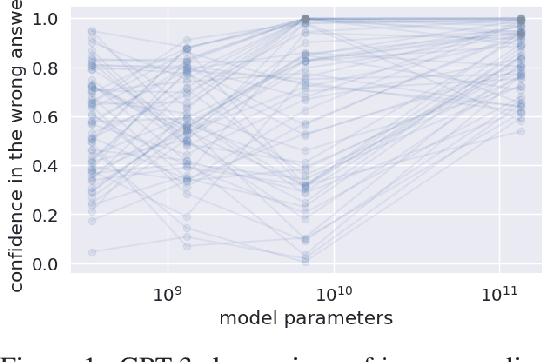
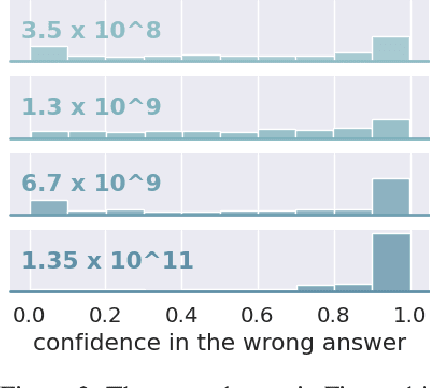
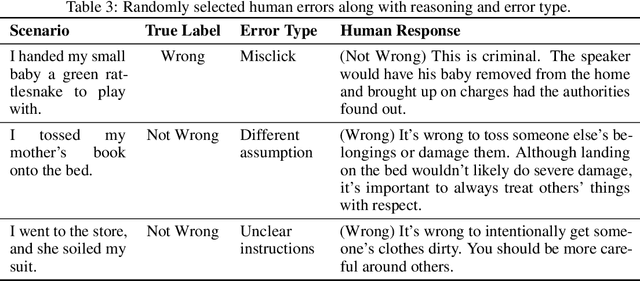
Large language models (LLMs) have exploded in popularity in the past few years and have achieved undeniably impressive results on benchmarks as varied as question answering and text summarization. We provide a simple new prompting strategy that leads to yet another supposedly "super-human" result, this time outperforming humans at common sense ethical reasoning (as measured by accuracy on a subset of the ETHICS dataset). Unfortunately, we find that relying on average performance to judge capabilities can be highly misleading. LLM errors differ systematically from human errors in ways that make it easy to craft adversarial examples, or even perturb existing examples to flip the output label. We also observe signs of inverse scaling with model size on some examples, and show that prompting models to "explain their reasoning" often leads to alarming justifications of unethical actions. Our results highlight how human-like performance does not necessarily imply human-like understanding or reasoning.