 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Automated Reachability Analysis of Neural Network-Controlled Systems via Adaptive Polytopes
Dec 14, 2022
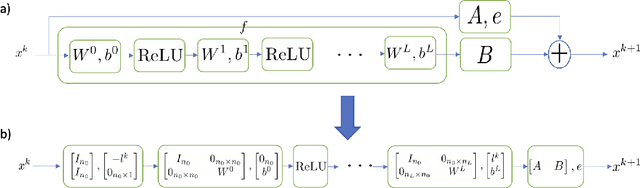
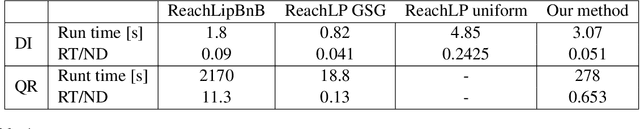
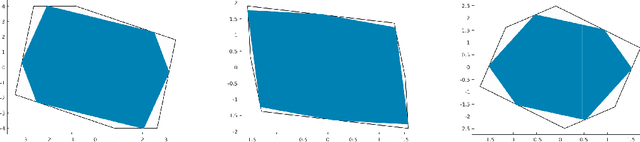

Over-approximating the reachable sets of dynamical systems is a fundamental problem in safety verification and robust control synthesis. The representation of these sets is a key factor that affects the computational complexity and the approximation error. In this paper, we develop a new approach for over-approximating the reachable sets of neural network dynamical systems using adaptive template polytopes. We use the singular value decomposition of linear layers along with the shape of the activation functions to adapt the geometry of the polytopes at each time step to the geometry of the true reachable sets. We then propose a branch-and-bound method to compute accurate over-approximations of the reachable sets by the inferred templates. We illustrate the utility of the proposed approach in the reachability analysis of linear systems driven by neural network controllers.
An Adaptive Robotics Framework for Chemistry Lab Automation
Dec 19, 2022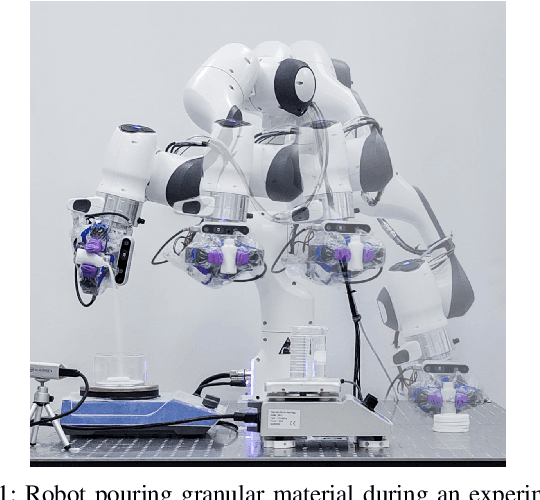
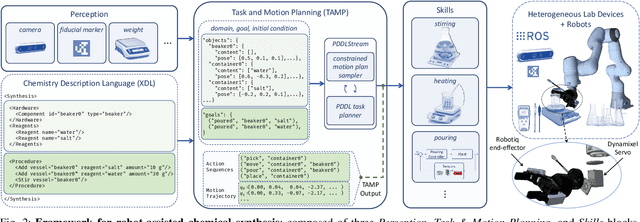
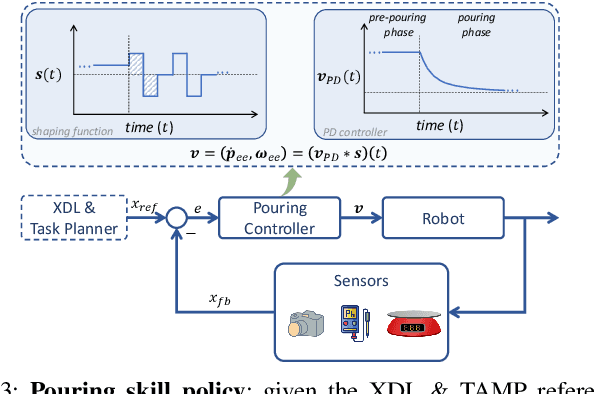
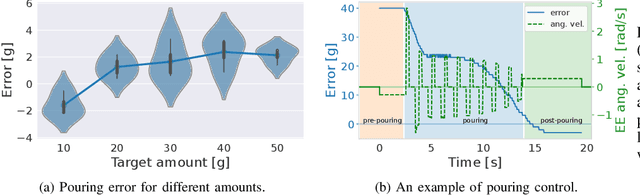
In the process of materials discovery, chemists currently need to perform many laborious, time-consuming, and often dangerous lab experiments. To accelerate this process, we propose a framework for robots to assist chemists by performing lab experiments autonomously. The solution allows a general-purpose robot to perform diverse chemistry experiments and efficiently make use of available lab tools. Our system can load high-level descriptions of chemistry experiments, perceive a dynamic workspace, and autonomously plan the required actions and motions to perform the given chemistry experiments with common tools found in the existing lab environment. Our architecture uses a modified PDDLStream solver for integrated task and constrained motion planning, which generates plans and motions that are guaranteed to be safe by preventing collisions and spillage. We present a modular framework that can scale to many different experiments, actions, and lab tools. In this work, we demonstrate the utility of our framework on three pouring skills and two foundational chemical experiments for materials synthesis: solubility and recrystallization. More experiments and updated evaluations can be found at https://ac-rad.github.io/arc-icra2023.
LayoutDETR: Detection Transformer Is a Good Multimodal Layout Designer
Dec 19, 2022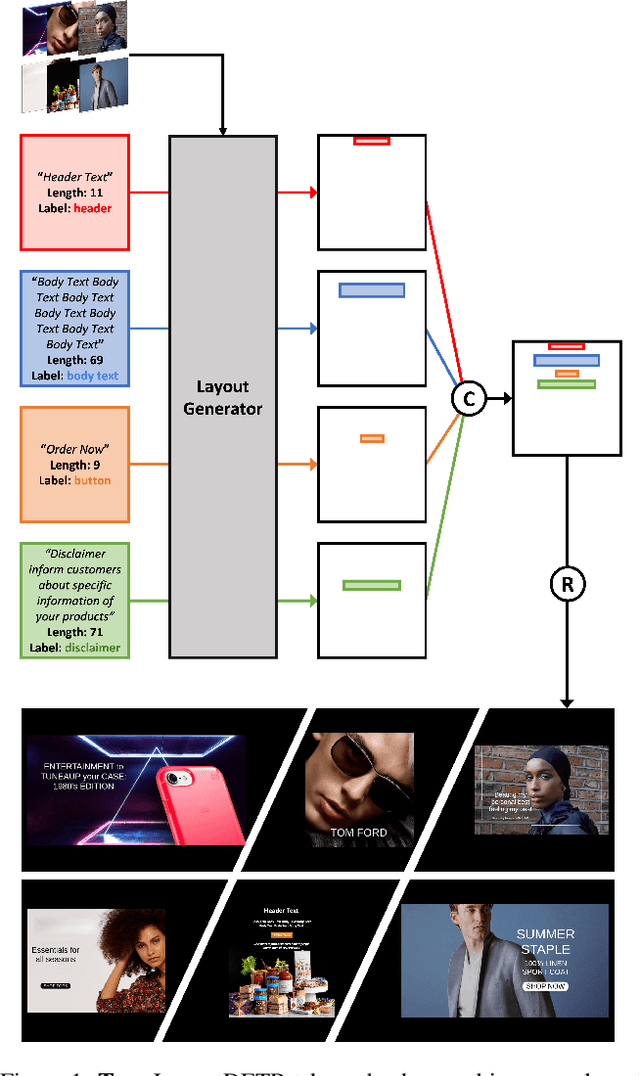
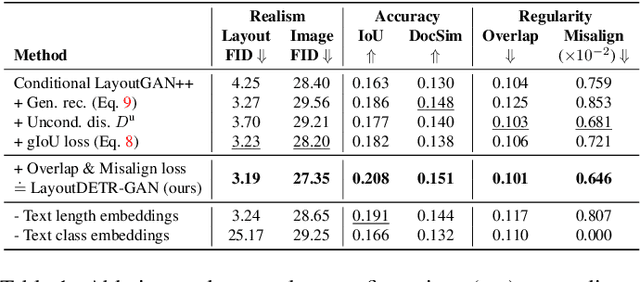
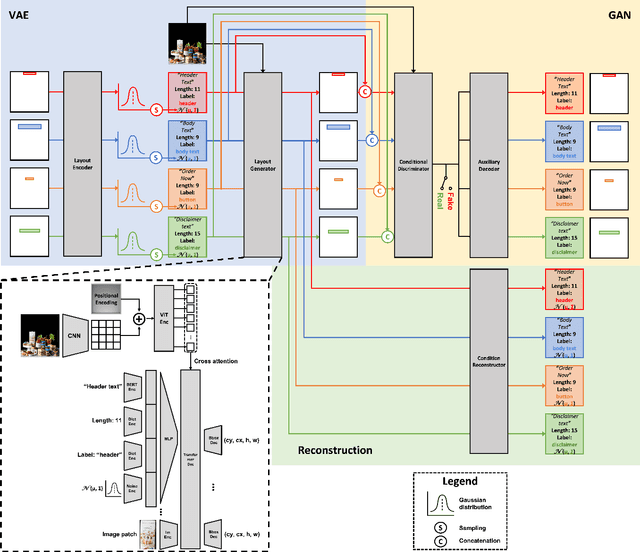
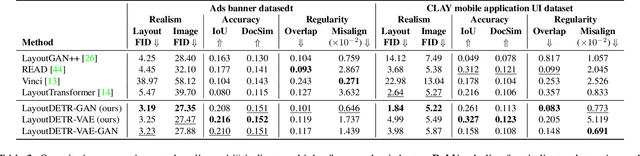
Graphic layout designs play an essential role in visual communication. Yet handcrafting layout designs are skill-demanding, time-consuming, and non-scalable to batch production. Although generative models emerge to make design automation no longer utopian, it remains non-trivial to customize designs that comply with designers' multimodal desires, i.e., constrained by background images and driven by foreground contents. In this study, we propose \textit{LayoutDETR} that inherits the high quality and realism from generative modeling, in the meanwhile reformulating content-aware requirements as a detection problem: we learn to detect in a background image the reasonable locations, scales, and spatial relations for multimodal elements in a layout. Experiments validate that our solution yields new state-of-the-art performance for layout generation on public benchmarks and on our newly-curated ads banner dataset. For practical usage, we build our solution into a graphical system that facilitates user studies. We demonstrate that our designs attract more subjective preference than baselines by significant margins. Our code, models, dataset, graphical system, and demos are available at https://github.com/salesforce/LayoutDETR.
Joint Relay Selection and Beam Management Based on Deep Reinforcement Learning for Millimeter Wave Vehicular Communication
Dec 19, 2022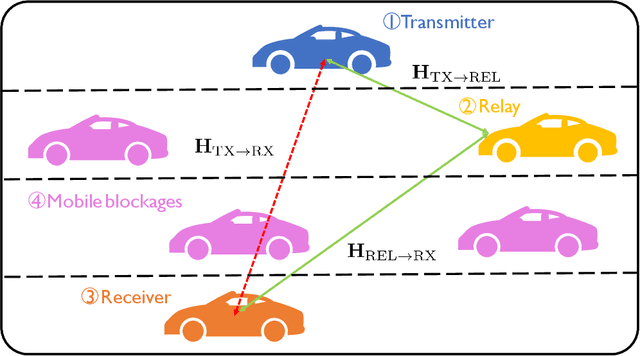
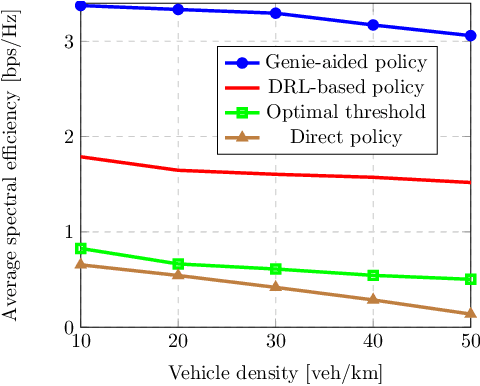
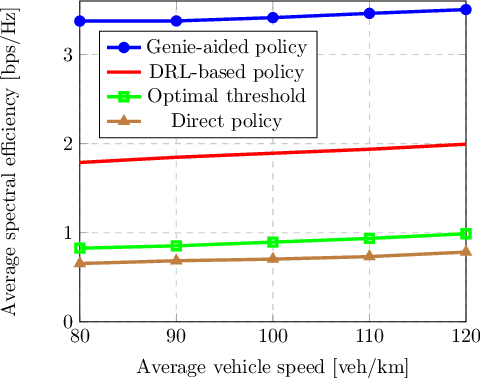
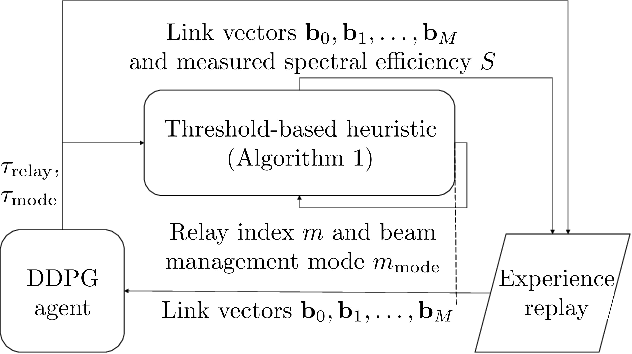
Cooperative relays improve reliability and coverage in wireless networks by providing multiple paths for data transmission. Relaying will play an essential role in vehicular networks at higher frequency bands, where mobility and frequent signal blockages cause link outages. To ensure connectivity in a relay-aided vehicular network, the relay selection policy should be designed to efficiently find unblocked relays. Inspired by recent advances in beam management in mobile millimeter wave (mmWave) networks, this paper address the question: how can the best relay be selected with minimal overhead from beam management? In this regard, we formulate a sequential decision problem to jointly optimize relay selection and beam management. We propose a joint relay selection and beam management policy based on deep reinforcement learning (DRL) using the Markov property of beam indices and beam measurements. The proposed DRL-based algorithm learns time-varying thresholds that adapt to the dynamic channel conditions and traffic patterns. Numerical experiments demonstrate that the proposed algorithm outperforms baselines without prior channel knowledge. Moreover, the DRL-based algorithm can maintain high spectral efficiency under fast-varying channels.
A Comparison Study of Deep CNN Architecture in Detecting of Pneumonia
Dec 30, 2022
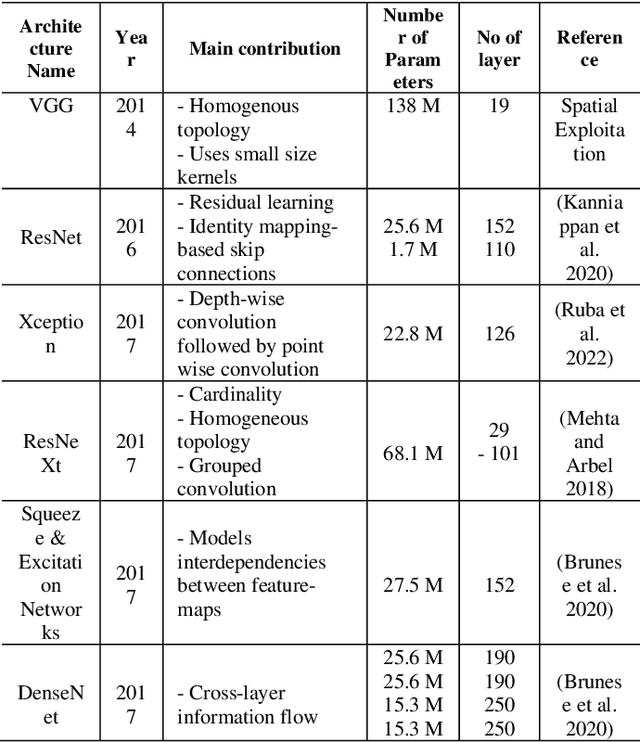
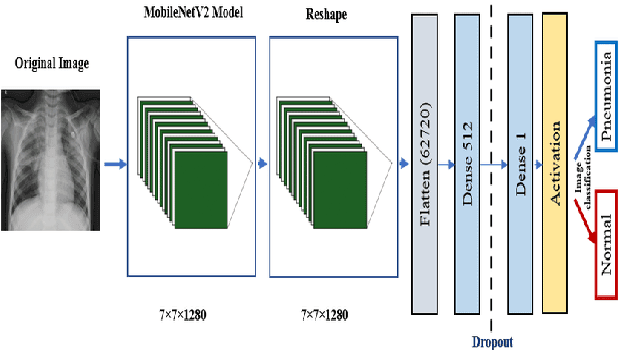

Pneumonia, a respiratory infection brought on by bacteria or viruses, affects a large number of people, especially in developing and impoverished countries where high levels of pollution, unclean living conditions, and overcrowding are frequently observed, along with insufficient medical infrastructure. Pleural effusion, a condition in which fluids fill the lung and complicate breathing, is brought on by pneumonia. Early detection of pneumonia is essential for ensuring curative care and boosting survival rates. The approach most usually used to diagnose pneumonia is chest X-ray imaging. The purpose of this work is to develop a method for the automatic diagnosis of bacterial and viral pneumonia in digital x-ray pictures. This article first presents the authors' technique, and then gives a comprehensive report on recent developments in the field of reliable diagnosis of pneumonia. In this study, here tuned a state-of-the-art deep convolutional neural network to classify plant diseases based on images and tested its performance. Deep learning architecture is compared empirically. VGG19, ResNet with 152v2, Resnext101, Seresnet152, Mobilenettv2, and DenseNet with 201 layers are among the architectures tested. Experiment data consists of two groups, sick and healthy X-ray pictures. To take appropriate action against plant diseases as soon as possible, rapid disease identification models are preferred. DenseNet201 has shown no overfitting or performance degradation in our experiments, and its accuracy tends to increase as the number of epochs increases. Further, DenseNet201 achieves state-of-the-art performance with a significantly a smaller number of parameters and within a reasonable computing time. This architecture outperforms the competition in terms of testing accuracy, scoring 95%. Each architecture was trained using Keras, using Theano as the backend.
Abnormal Signal Recognition with Time-Frequency Spectrogram: A Deep Learning Approach
May 30, 2022
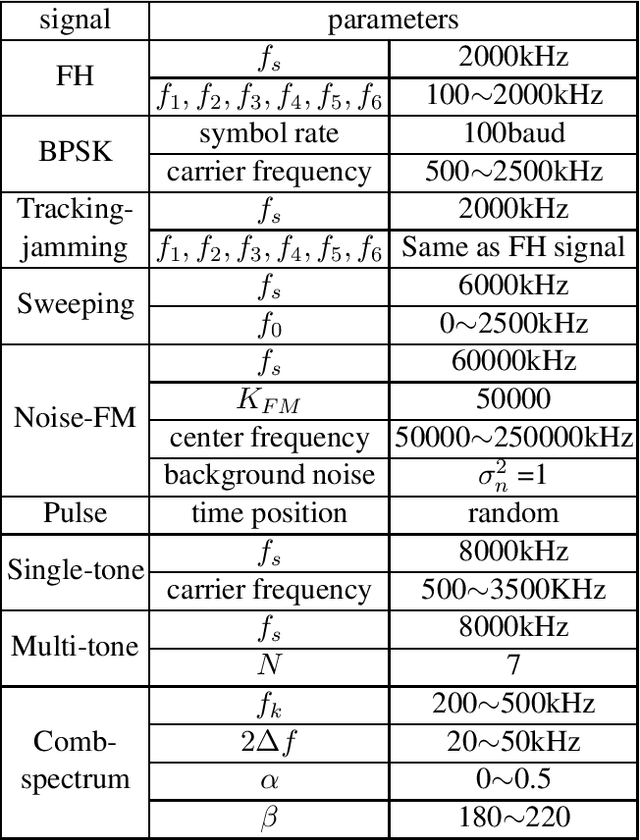


With the increasingly complex and changeable electromagnetic environment, wireless communication systems are facing jamming and abnormal signal injection, which significantly affects the normal operation of a communication system. In particular, the abnormal signals may emulate the normal signals, which makes it very challenging for abnormal signal recognition. In this paper, we propose a new abnormal signal recognition scheme, which combines time-frequency analysis with deep learning to effectively identify synthetic abnormal communication signals. Firstly, we emulate synthetic abnormal communication signals including seven jamming patterns. Then, we model an abnormal communication signals recognition system based on the communication protocol between the transmitter and the receiver. To improve the performance, we convert the original signal into the time-frequency spectrogram to develop an image classification algorithm. Simulation results demonstrate that the proposed method can effectively recognize the abnormal signals under various parameter configurations, even under low signal-to-noise ratio (SNR) and low jamming-to-signal ratio (JSR) conditions.
Deep Learning Framework for Real-time Fetal Brain Segmentation in MRI
May 02, 2022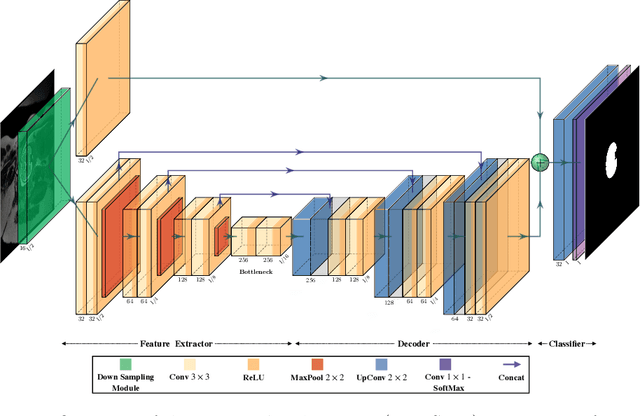
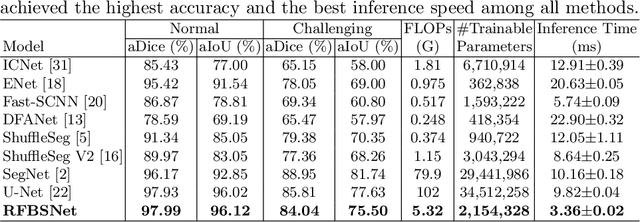
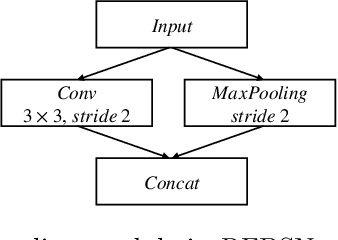
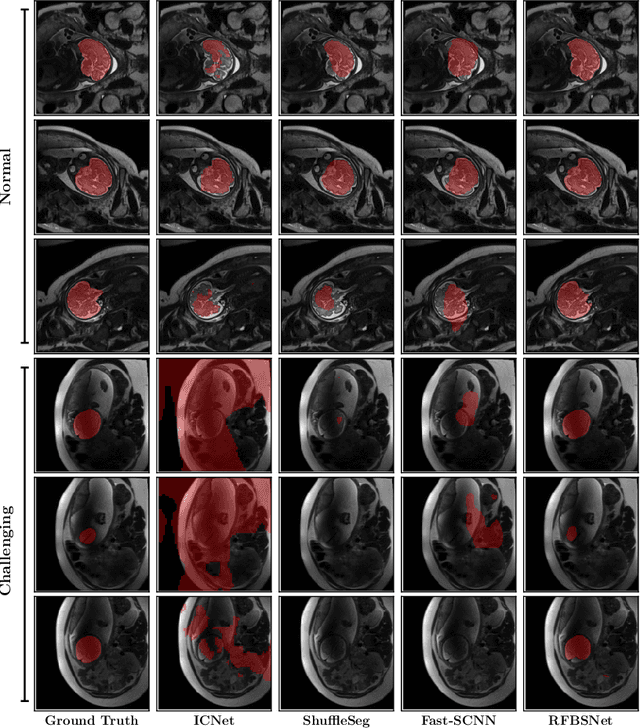
Fetal brain segmentation is an important first step for slice-level motion correction and slice-to-volume reconstruction in fetal MRI. Fast and accurate segmentation of the fetal brain on fetal MRI is required to achieve real-time fetal head pose estimation and motion tracking for slice re-acquisition and steering. To address this critical unmet need, in this work we analyzed the speed-accuracy performance of a variety of deep neural network models, and devised a symbolically small convolutional neural network that combines spatial details at high resolution with context features extracted at lower resolutions. We used multiple branches with skip connections to maintain high accuracy while devising a parallel combination of convolution and pooling operations as an input downsampling module to further reduce inference time. We trained our model as well as eight alternative, state-of-the-art networks with manually-labeled fetal brain MRI slices and tested on two sets of normal and challenging test cases. Experimental results show that our network achieved the highest accuracy and lowest inference time among all of the compared state-of-the-art real-time segmentation methods. We achieved average Dice scores of 97.99\% and 84.04\% on the normal and challenging test sets, respectively, with an inference time of 3.36 milliseconds per image on an NVIDIA GeForce RTX 2080 Ti. Code, data, and the trained models are available at https://github.com/bchimagine/real_time_fetal_brain_segmentation.
Religion and Spirituality on Social Media in the Aftermath of the Global Pandemic
Dec 11, 2022
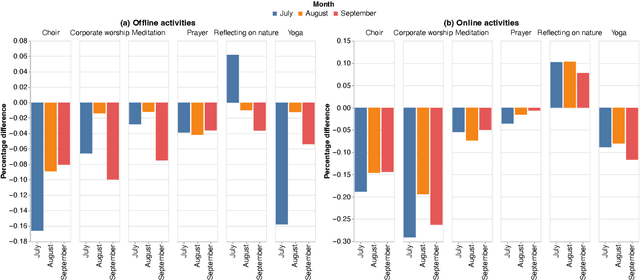
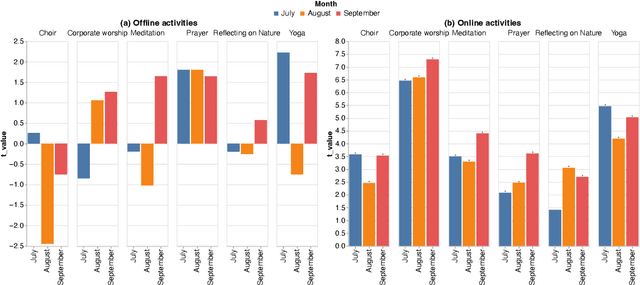
During the COVID-19 pandemic, the Church closed its physical doors for the first time in about 800 years, which is, arguably, a cataclysmic event. Other religions have found themselves in a similar situation, and they were practically forced to move online, which is an unprecedented occasion. In this paper, we analyse this sudden change in religious activities twofold: we create and deliver a questionnaire, as well as analyse Twitter data, to understand people's perceptions and activities related to religious activities online. Importantly, we also analyse the temporal variations in this process by analysing a period of 3 months: July-September 2020. Additionally to the separate analysis of the two data sources, we also discuss the implications from triangulating the results.
StepNet: Spatial-temporal Part-aware Network for Sign Language Recognition
Dec 25, 2022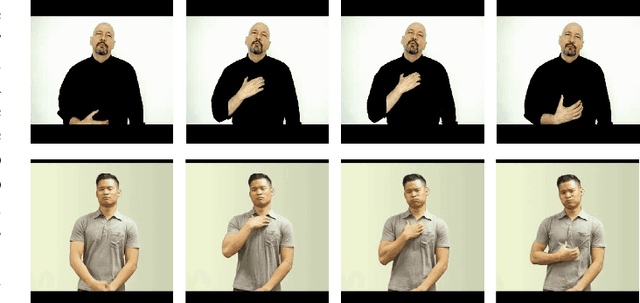
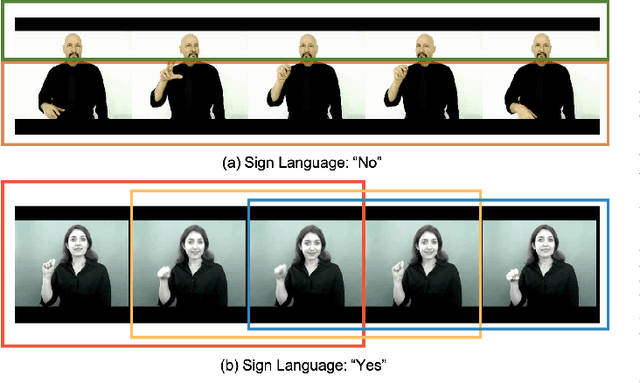
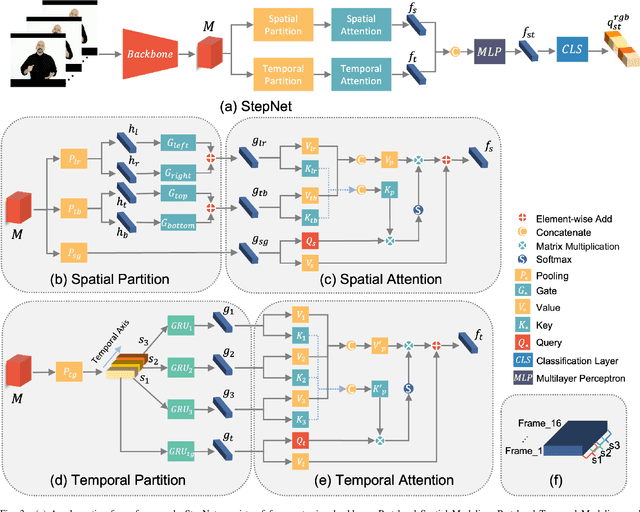
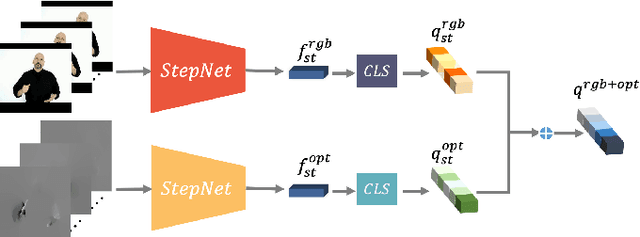
Sign language recognition (SLR) aims to overcome the communication barrier for the people with deafness or the people with hard hearing. Most existing approaches can be typically divided into two lines, i.e., Skeleton-based and RGB-based methods, but both the two lines of methods have their limitations. RGB-based approaches usually overlook the fine-grained hand structure, while Skeleton-based methods do not take the facial expression into account. In attempts to address both limitations, we propose a new framework named Spatial-temporal Part-aware network (StepNet), based on RGB parts. As the name implies, StepNet consists of two modules: Part-level Spatial Modeling and Part-level Temporal Modeling. Particularly, without using any keypoint-level annotations, Part-level Spatial Modeling implicitly captures the appearance-based properties, such as hands and faces, in the feature space. On the other hand, Part-level Temporal Modeling captures the pertinent properties over time by implicitly mining the long-short term context. Extensive experiments show that our StepNet, thanks to Spatial-temporal modules, achieves competitive Top-1 Per-instance accuracy on three widely-used SLR benchmarks, i.e., 56.89% on WLASL, 77.2% on NMFs-CSL, and 77.1% on BOBSL. Moreover, the proposed method is compatible with the optical flow input, and can yield higher performance if fused. We hope that this work can serve as a preliminary step for the people with deafness.
Temporally Layered Architecture for Adaptive, Distributed and Continuous Control
Dec 25, 2022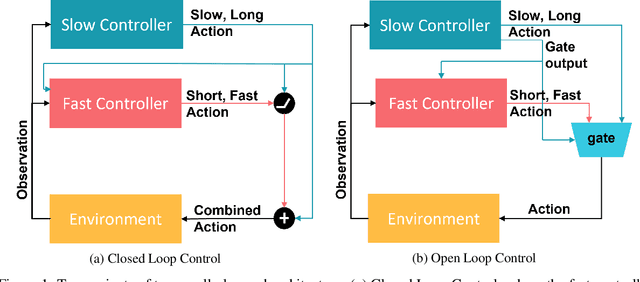



We present temporally layered architecture (TLA), a biologically inspired system for temporally adaptive distributed control. TLA layers a fast and a slow controller together to achieve temporal abstraction that allows each layer to focus on a different time-scale. Our design is biologically inspired and draws on the architecture of the human brain which executes actions at different timescales depending on the environment's demands. Such distributed control design is widespread across biological systems because it increases survivability and accuracy in certain and uncertain environments. We demonstrate that TLA can provide many advantages over existing approaches, including persistent exploration, adaptive control, explainable temporal behavior, compute efficiency and distributed control. We present two different algorithms for training TLA: (a) Closed-loop control, where the fast controller is trained over a pre-trained slow controller, allowing better exploration for the fast controller and closed-loop control where the fast controller decides whether to "act-or-not" at each timestep; and (b) Partially open loop control, where the slow controller is trained over a pre-trained fast controller, allowing for open loop-control where the slow controller picks a temporally extended action or defers the next n-actions to the fast controller. We evaluated our method on a suite of continuous control tasks and demonstrate the advantages of TLA over several strong baselines.