 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Annotation by Clicks: A Point-Supervised Contrastive Variance Method for Medical Semantic Segmentation
Dec 23, 2022
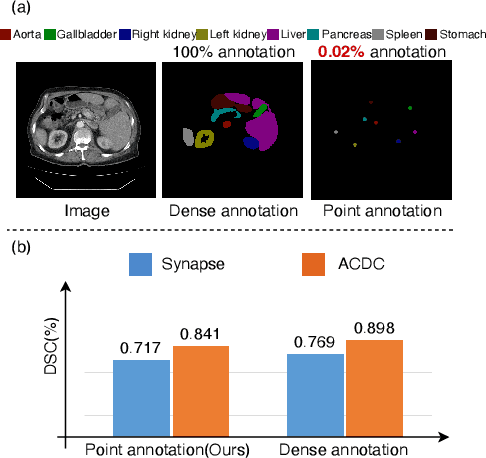

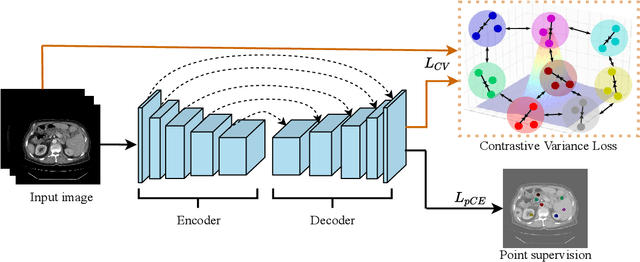
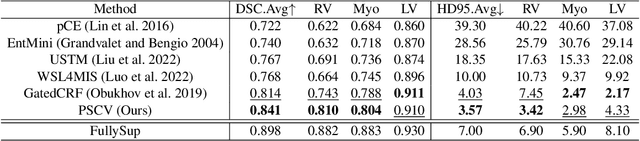
Medical image segmentation methods typically rely on numerous dense annotated images for model training, which are notoriously expensive and time-consuming to collect. To alleviate this burden, weakly supervised techniques have been exploited to train segmentation models with less expensive annotations. In this paper, we propose a novel point-supervised contrastive variance method (PSCV) for medical image semantic segmentation, which only requires one pixel-point from each organ category to be annotated. The proposed method trains the base segmentation network by using a novel contrastive variance (CV) loss to exploit the unlabeled pixels and a partial cross-entropy loss on the labeled pixels. The CV loss function is designed to exploit the statistical spatial distribution properties of organs in medical images and their variance distribution map representations to enforce discriminative predictions over the unlabeled pixels. Experimental results on two standard medical image datasets demonstrate that the proposed method outperforms the state-of-the-art weakly supervised methods on point-supervised medical image semantic segmentation tasks.
Emergent communication enhances foraging behaviour in evolved swarms controlled by Spiking Neural Networks
Dec 16, 2022
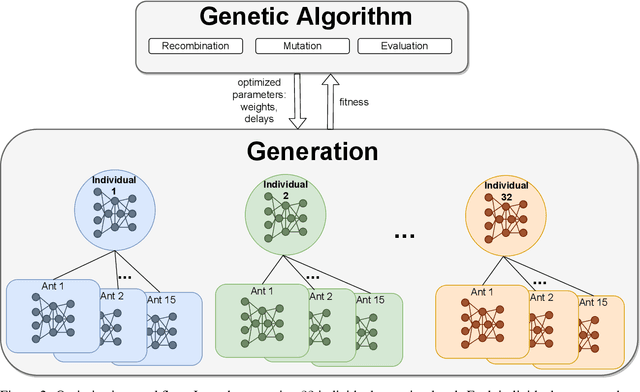
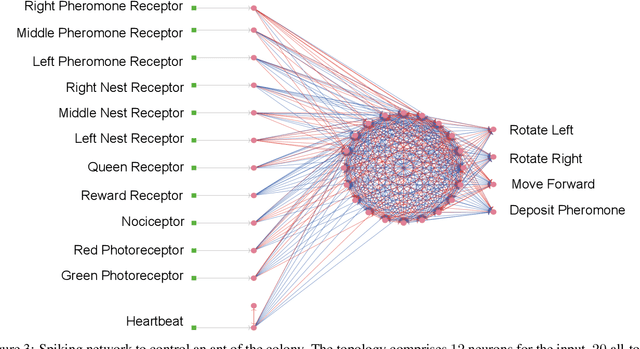
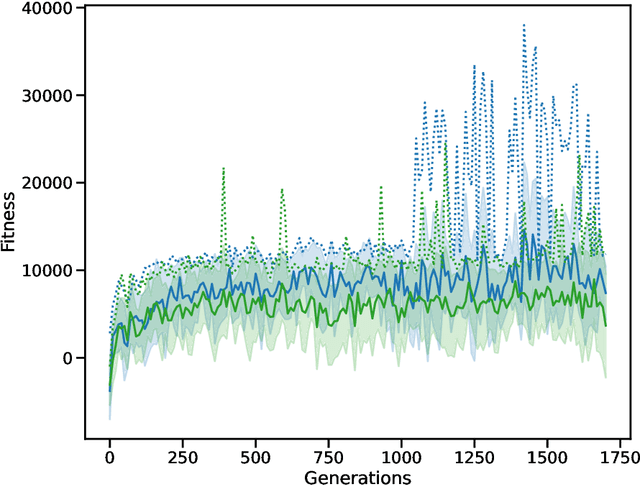
Social insects such as ants communicate via pheromones which allows them to coordinate their activity and solve complex tasks as a swarm, e.g. foraging for food. This behaviour was shaped through evolutionary processes. In computational models, self-coordination in swarms has been implemented using probabilistic or action rules to shape the decision of each agent and the collective behaviour. However, manual tuned decision rules may limit the behaviour of the swarm. In this work we investigate the emergence of self-coordination and communication in evolved swarms without defining any rule. We evolve a swarm of agents representing an ant colony. We use a genetic algorithm to optimize a spiking neural network (SNN) which serves as an artificial brain to control the behaviour of each agent. The goal of the colony is to find optimal ways to forage for food in the shortest amount of time. In the evolutionary phase, the ants are able to learn to collaborate by depositing pheromone near food piles and near the nest to guide its cohorts. The pheromone usage is not encoded into the network; instead, this behaviour is established through the optimization procedure. We observe that pheromone-based communication enables the ants to perform better in comparison to colonies where communication did not emerge. We assess the foraging performance by comparing the SNN based model to a rule based system. Our results show that the SNN based model can complete the foraging task more efficiently in a shorter time. Our approach illustrates that even in the absence of pre-defined rules, self coordination via pheromone emerges as a result of the network optimization. This work serves as a proof of concept for the possibility of creating complex applications utilizing SNNs as underlying architectures for multi-agent interactions where communication and self-coordination is desired.
Neural Enhanced Belief Propagation for Multiobject Tracking
Dec 16, 2022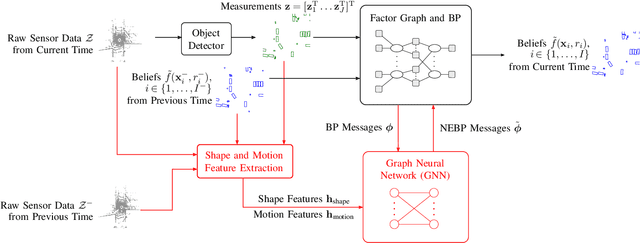
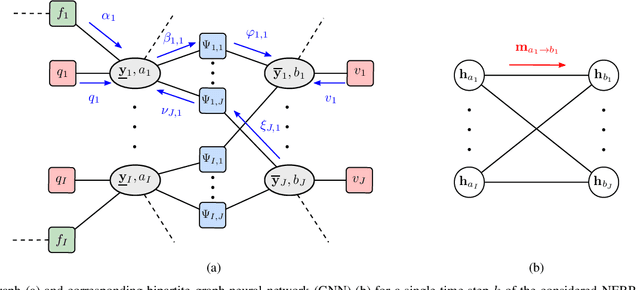
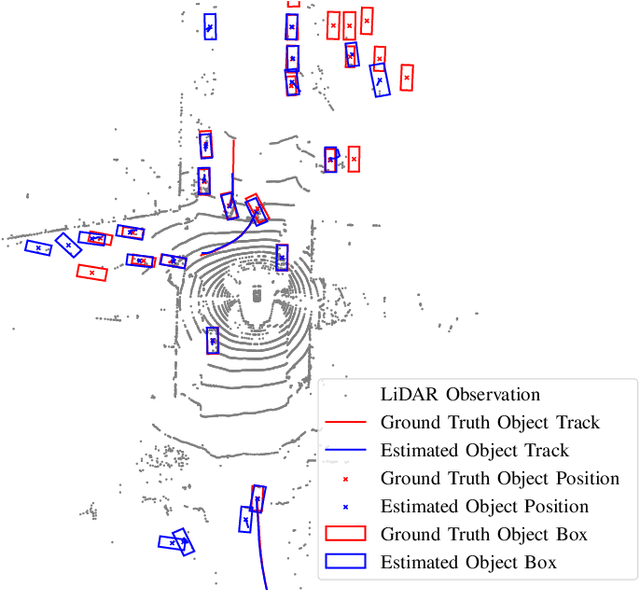
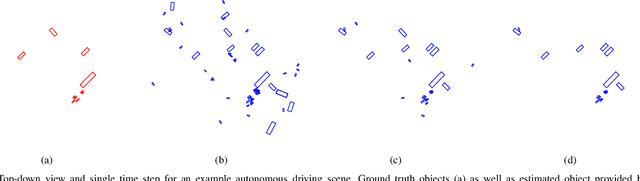
Algorithmic solutions for multi-object tracking (MOT) are a key enabler for applications in autonomous navigation and applied ocean sciences. State-of-the-art MOT methods fully rely on a statistical model and typically use preprocessed sensor data as measurements. In particular, measurements are produced by a detector that extracts potential object locations from the raw sensor data collected for a discrete time step. This preparatory processing step reduces data flow and computational complexity but may result in a loss of information. State-of-the-art Bayesian MOT methods that are based on belief propagation (BP) systematically exploit graph structures of the statistical model to reduce computational complexity and improve scalability. However, as a fully model-based approach, BP can only provide suboptimal estimates when there is a mismatch between the statistical model and the true data-generating process. Existing BP-based MOT methods can further only make use of preprocessed measurements. In this paper, we introduce a variant of BP that combines model-based with data-driven MOT. The proposed neural enhanced belief propagation (NEBP) method complements the statistical model of BP by information learned from raw sensor data. This approach conjectures that the learned information can reduce model mismatch and thus improve data association and false alarm rejection. Our NEBP method improves tracking performance compared to model-based methods. At the same time, it inherits the advantages of BP-based MOT, i.e., it scales only quadratically in the number of objects, and it can thus generate and maintain a large number of object tracks. We evaluate the performance of our NEBP approach for MOT on the nuScenes autonomous driving dataset and demonstrate that it has state-of-the-art performance.
Plant species richness prediction from DESIS hyperspectral data: A comparison study on feature extraction procedures and regression models
Jan 05, 2023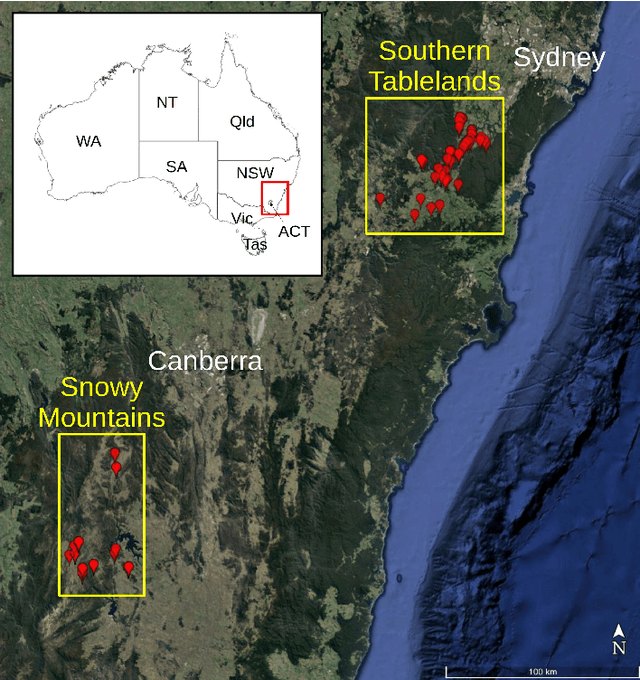
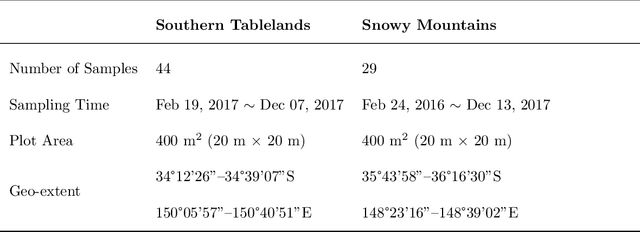
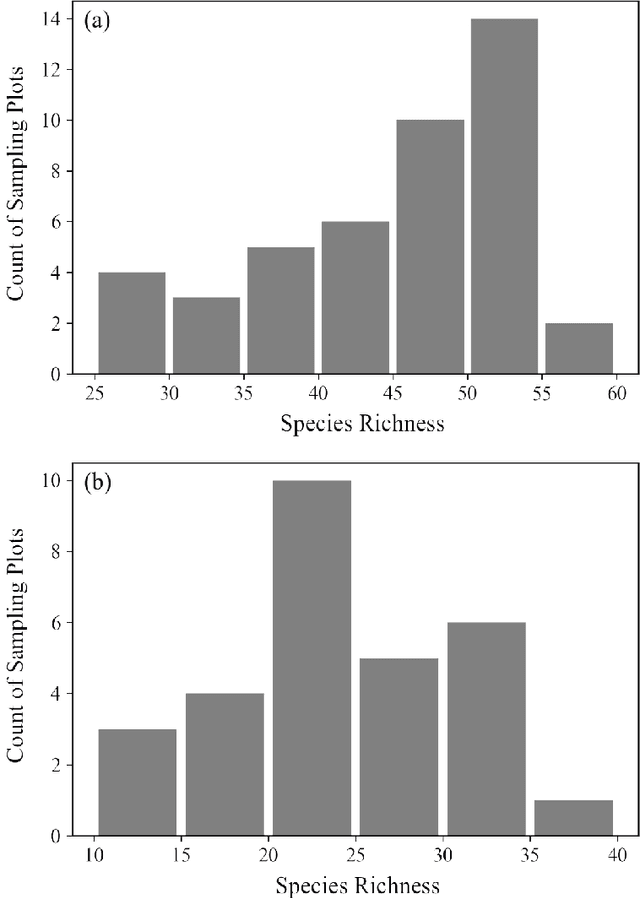
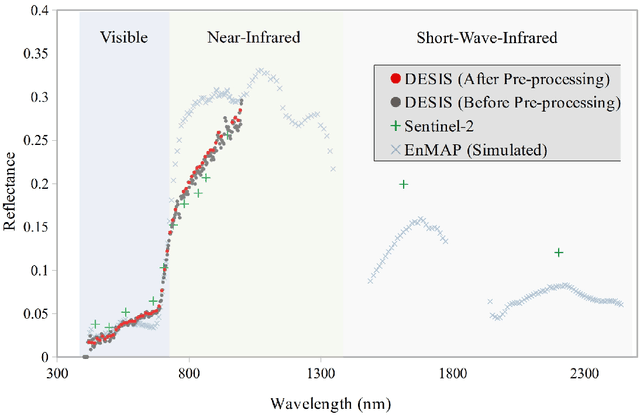
The diversity of terrestrial vascular plants plays a key role in maintaining the stability and productivity of ecosystems. Monitoring species compositional diversity across large spatial scales is challenging and time consuming. The advanced spectral and spatial specification of the recently launched DESIS (the DLR Earth Sensing Imaging Spectrometer) instrument provides a unique opportunity to test the potential for monitoring plant species diversity with spaceborne hyperspectral data. This study provides a quantitative assessment on the ability of DESIS hyperspectral data for predicting plant species richness in two different habitat types in southeast Australia. Spectral features were first extracted from the DESIS spectra, then regressed against on-ground estimates of plant species richness, with a two-fold cross validation scheme to assess the predictive performance. We tested and compared the effectiveness of Principal Component Analysis (PCA), Canonical Correlation Analysis (CCA), and Partial Least Squares analysis (PLS) for feature extraction, and Kernel Ridge Regression (KRR), Gaussian Process Regression (GPR), Random Forest Regression (RFR) for species richness prediction. The best prediction results were r=0.76 and RMSE=5.89 for the Southern Tablelands region, and r=0.68 and RMSE=5.95 for the Snowy Mountains region. Relative importance analysis for the DESIS spectral bands showed that the red-edge, red, and blue spectral regions were more important for predicting plant species richness than the green bands and the near-infrared bands beyond red-edge. We also found that the DESIS hyperspectral data performed better than Sentinel-2 multispectral data in the prediction of plant species richness. Our results provide a quantitative reference for future studies exploring the potential of spaceborne hyperspectral data for plant biodiversity mapping.
Superimposed Channel Estimation in OTFS Modulation Using Compressive Sensing
Dec 19, 2022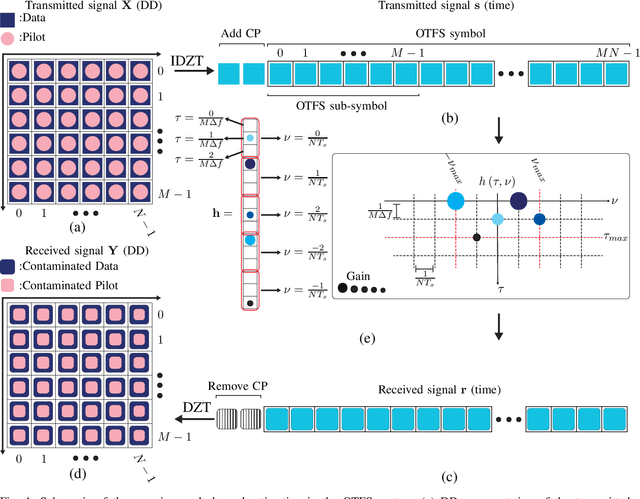
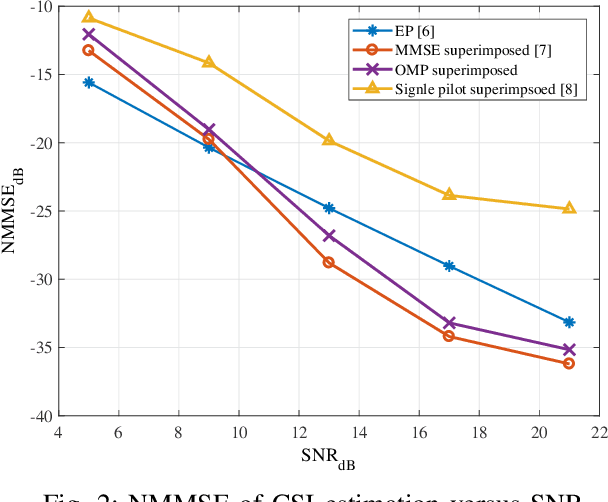
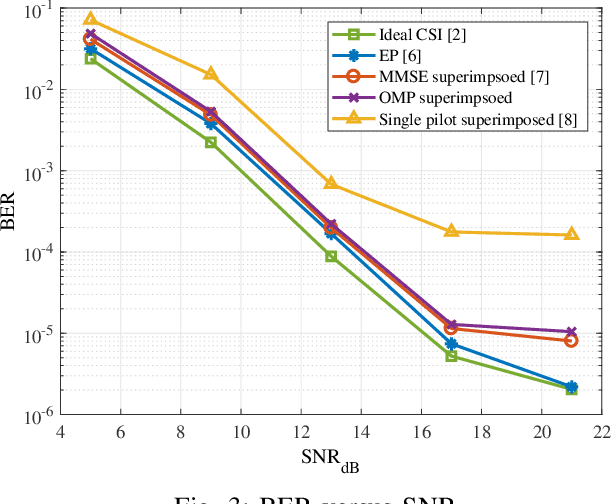
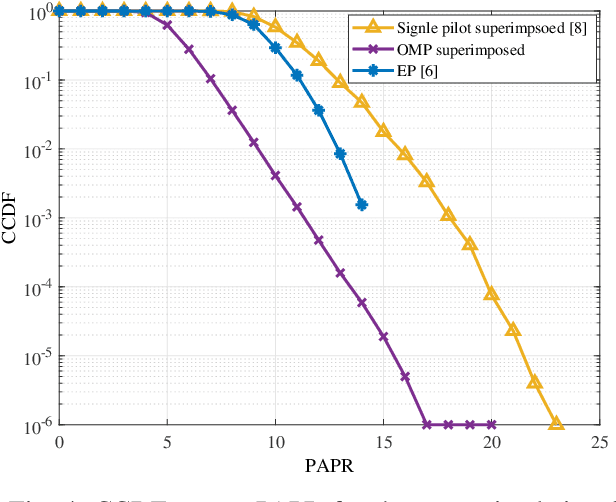
Orthogonal time frequency space (OTFS) technique is a two-dimensional modulation method that multiplexes information symbols in the delay-Doppler (DD) domain. OTFS combats high Doppler shift existing in high speed wireless communication. However, conventional channel estimation in OTFS suffers from high pilot overhead because guard symbols occupy a significant part of the DD domain grids. In this paper, a superimposed channel estimation is proposed which can completely estimate channel parameters without considering pilot overhead and performance degradation. As the channel state information (CSI) in the DD domain is sparse, a sparse recovery algorithm orthogonal matching pursuit (OMP) is used. Besides, our proposed method does not suffer from high peak to average power ratio (PAPR). To detect information symbols, a message passing (MP) detector, which exploits the sparsity of DD channel representation, is employed.
Hardware Acceleration of Lane Detection Algorithm: A GPU Versus FPGA Comparison
Dec 19, 2022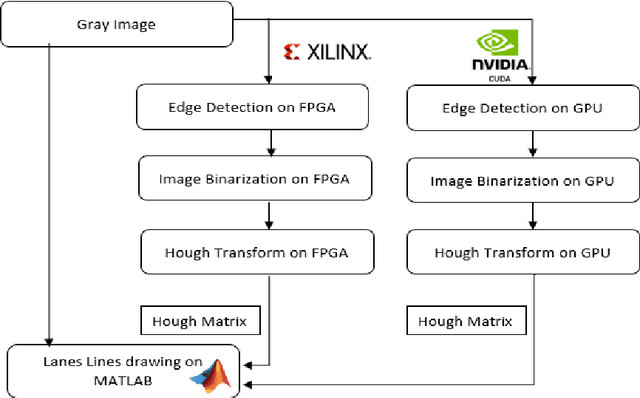

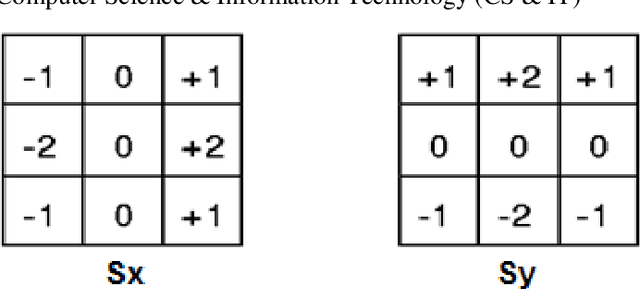

A Complete Computer vision system can be divided into two main categories: detection and classification. The Lane detection algorithm is a part of the computer vision detection category and has been applied in autonomous driving and smart vehicle systems. The lane detection system is responsible for lane marking in a complex road environment. At the same time, lane detection plays a crucial role in the warning system for a car when departs the lane. The implemented lane detection algorithm is mainly divided into two steps: edge detection and line detection. In this paper, we will compare the state-of-the-art implementation performance obtained with both FPGA and GPU to evaluate the trade-off for latency, power consumption, and utilization. Our comparison emphasises the advantages and disadvantages of the two systems.
UltraProp: Principled and Explainable Propagation on Large Graphs
Dec 31, 2022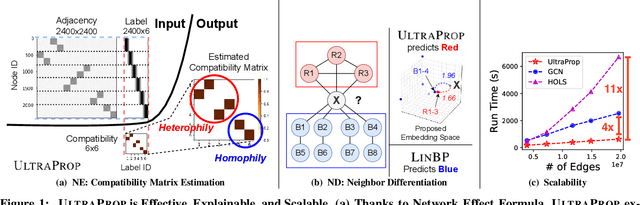
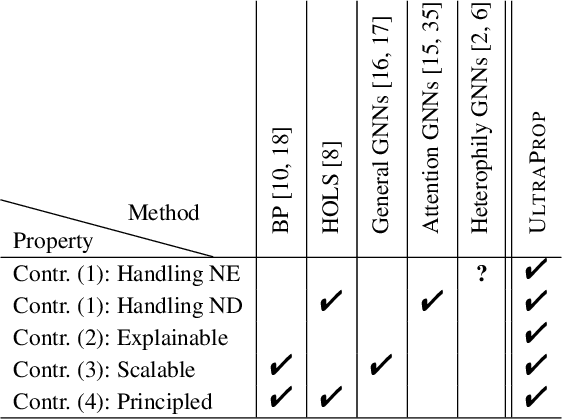
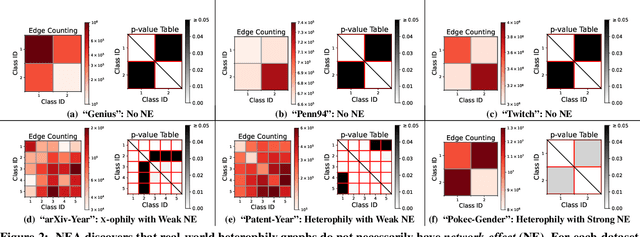
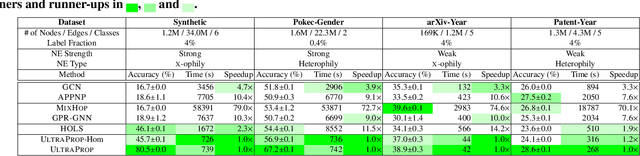
Given a large graph with few node labels, how can we (a) identify the mixed network-effect of the graph and (b) predict the unknown labels accurately and efficiently? This work proposes Network Effect Analysis (NEA) and UltraProp, which are based on two insights: (a) the network-effect (NE) insight: a graph can exhibit not only one of homophily and heterophily, but also both or none in a label-wise manner, and (b) the neighbor-differentiation (ND) insight: neighbors have different degrees of influence on the target node based on the strength of connections. NEA provides a statistical test to check whether a graph exhibits network-effect or not, and surprisingly discovers the absence of NE in many real-world graphs known to have heterophily. UltraProp solves the node classification problem with notable advantages: (a) Accurate, thanks to the network-effect (NE) and neighbor-differentiation (ND) insights; (b) Explainable, precisely estimating the compatibility matrix; (c) Scalable, being linear with the input size and handling graphs with millions of nodes; and (d) Principled, with closed-form formula and theoretical guarantee. Applied on eight real-world graph datasets, UltraProp outperforms top competitors in terms of accuracy and run time, requiring only stock CPU servers. On a large real-world graph with 1.6M nodes and 22.3M edges, UltraProp achieves more than 9 times speedup (12 minutes vs. 2 hours) compared to most competitors.
Hospital transfer risk prediction for COVID-19 patients from a medicalized hotel based on Diffusion GraphSAGE
Dec 31, 2022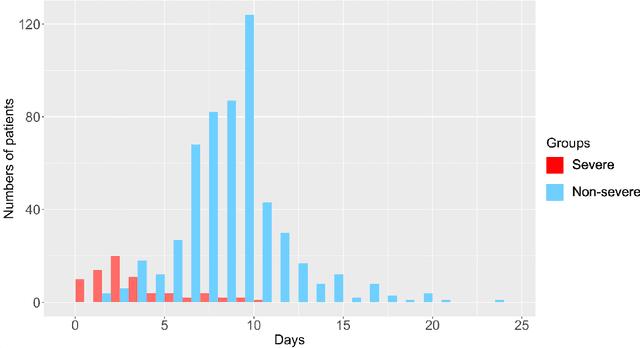
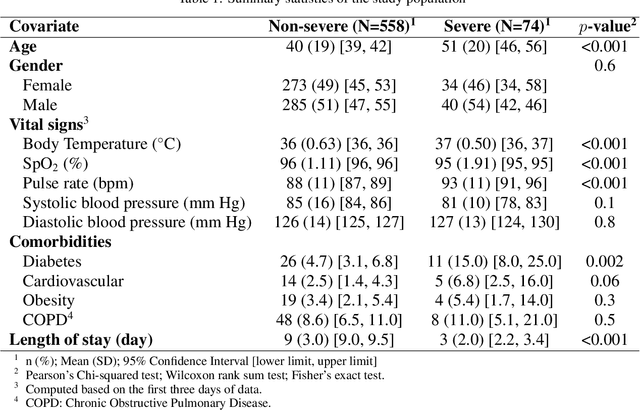
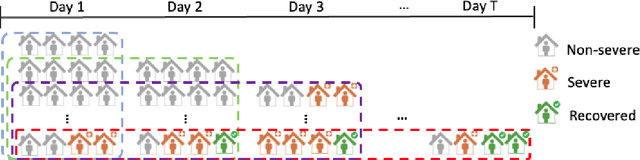
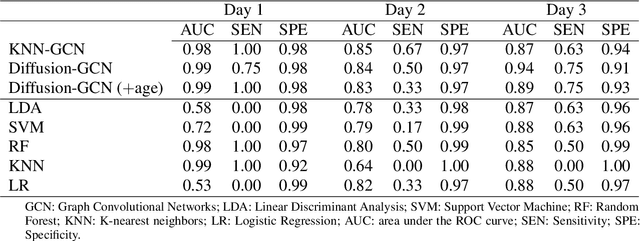
The global COVID-19 pandemic has caused more than six million deaths worldwide. Medicalized hotels were established in Taiwan as quarantine facilities for COVID-19 patients with no or mild symptoms. Due to limited medical care available at these hotels, it is of paramount importance to identify patients at risk of clinical deterioration. This study aimed to develop and evaluate a graph-based deep learning approach for progressive hospital transfer risk prediction in a medicalized hotel setting. Vital sign measurements were obtained for 632 patients and daily patient similarity graphs were constructed. Inductive graph convolutional network models were trained on top of the temporally integrated graphs to predict hospital transfer risk. The proposed models achieved AUC scores above 0.83 for hospital transfer risk prediction based on the measurements of past 1, 2, and 3 days, outperforming baseline machine learning methods. A post-hoc analysis on the constructed diffusion-based graph using Local Clustering Coefficient discovered a high-risk cluster with significantly older mean age, higher body temperature, lower SpO2, and shorter length of stay. Further time-to-hospital-transfer survival analysis also revealed a significant decrease in survival probability in the discovered high-risk cluster. The obtained results demonstrated promising predictability and interpretability of the proposed graph-based approach. This technique may help preemptively detect high-risk patients at community-based medical facilities similar to a medicalized hotel.
Contextual Bandits and Optimistically Universal Learning
Dec 31, 2022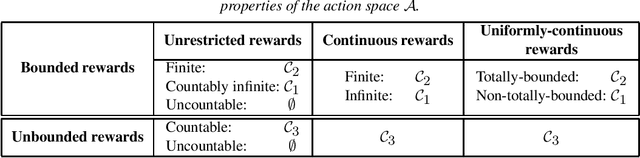
We consider the contextual bandit problem on general action and context spaces, where the learner's rewards depend on their selected actions and an observable context. This generalizes the standard multi-armed bandit to the case where side information is available, e.g., patients' records or customers' history, which allows for personalized treatment. We focus on consistency -- vanishing regret compared to the optimal policy -- and show that for large classes of non-i.i.d. contexts, consistency can be achieved regardless of the time-invariant reward mechanism, a property known as universal consistency. Precisely, we first give necessary and sufficient conditions on the context-generating process for universal consistency to be possible. Second, we show that there always exists an algorithm that guarantees universal consistency whenever this is achievable, called an optimistically universal learning rule. Interestingly, for finite action spaces, learnable processes for universal learning are exactly the same as in the full-feedback setting of supervised learning, previously studied in the literature. In other words, learning can be performed with partial feedback without any generalization cost. The algorithms balance a trade-off between generalization (similar to structural risk minimization) and personalization (tailoring actions to specific contexts). Lastly, we consider the case of added continuity assumptions on rewards and show that these lead to universal consistency for significantly larger classes of data-generating processes.
What Happens When Pneu-Net Soft Robotic Actuators Get Fatigued?
Dec 07, 2022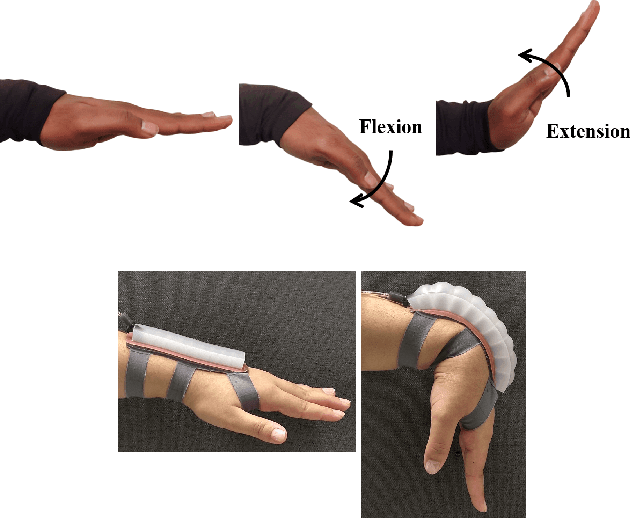
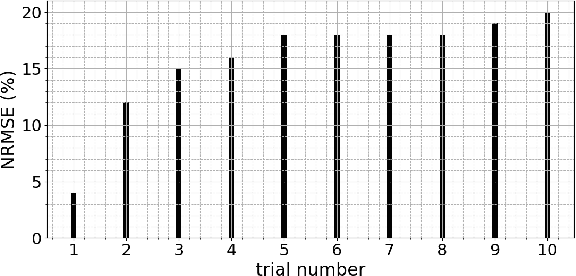
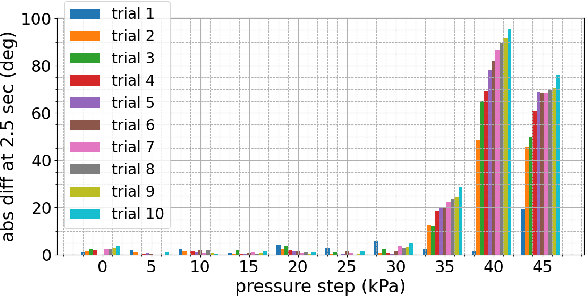
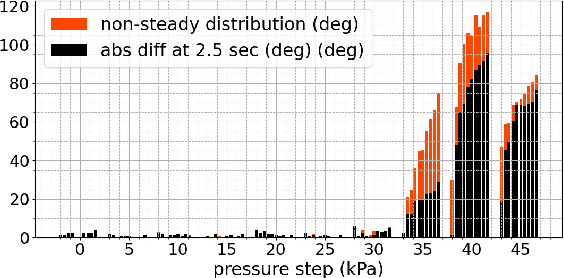
Soft actuators have attracted a great deal of interest in the context of rehabilitative and assistive robots for increasing safety and lowering costs as compared to rigid-body robotic systems. During actuation, soft actuators experience high levels of deformation, which can lead to microscale fractures in their elastomeric structure, which fatigues the system over time and eventually leads to macroscale damages and eventually failure. This paper reports finite element modeling (FEM) of pneu-nets at high angles, along with repetitive experimentation at high deformation rates, in order to study the effect and behavior of fatigue in soft robotic actuators, which would result in deviation from the ideal behavior. Comparing the FEM model and experimental data, we show that FEM can model the performance of the actuator before fatigue to a bending angle of 167 degrees with ~96% accuracy. We also show that the FEM model performance will drop to 80% due to fatigue after repetitive high-angle bending. The results of this paper objectively highlight the emergence of fatigue over cyclic activation of the system and the resulting deviation from the computational FEM model. Such behavior can be considered in future controllers to adapt the system with time-variable and non-autonomous response dynamics of soft robots.