 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
SoftEnNet: Symbiotic Monocular Depth Estimation and Lumen Segmentation for Colonoscopy Endorobots
Jan 19, 2023
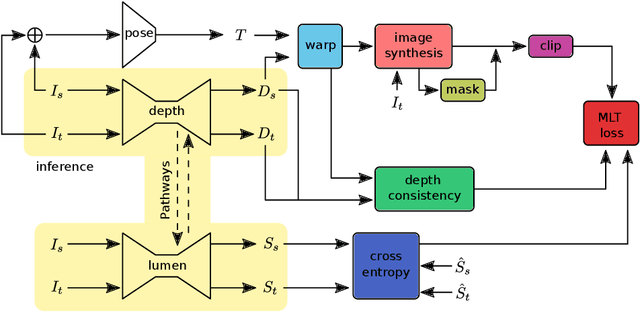
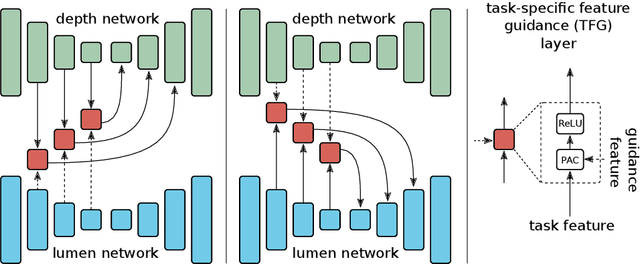
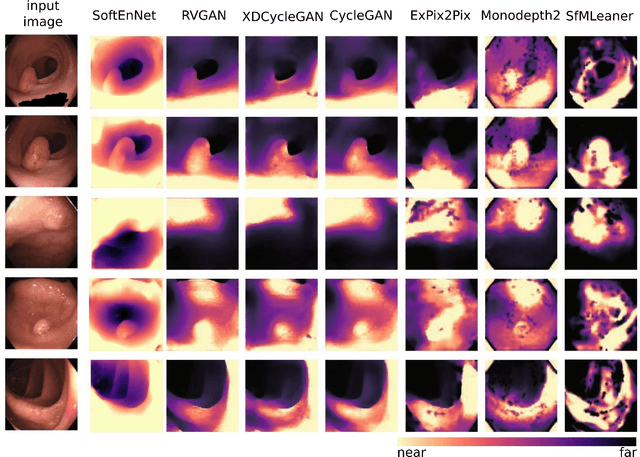
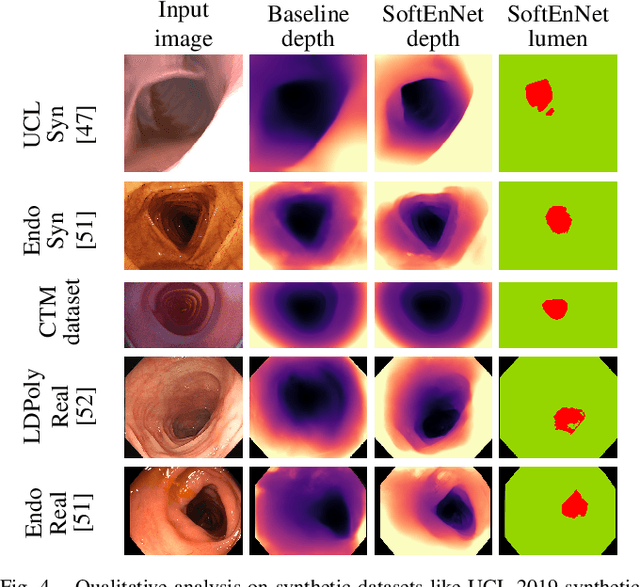
Colorectal cancer is the third most common cause of cancer death worldwide. Optical colonoscopy is the gold standard for detecting colorectal cancer; however, about 25 percent of polyps are missed during the procedure. A vision-based autonomous endorobot can improve colonoscopy procedures significantly through systematic, complete screening of the colonic mucosa. The reliable robot navigation needed requires a three-dimensional understanding of the environment and lumen tracking to support autonomous tasks. We propose a novel multi-task model that simultaneously predicts dense depth and lumen segmentation with an ensemble of deep networks. The depth estimation sub-network is trained in a self-supervised fashion guided by view synthesis; the lumen segmentation sub-network is supervised. The two sub-networks are interconnected with pathways that enable information exchange and thereby mutual learning. As the lumen is in the image's deepest visual space, lumen segmentation helps with the depth estimation at the farthest location. In turn, the estimated depth guides the lumen segmentation network as the lumen location defines the farthest scene location. Unlike other environments, view synthesis often fails in the colon because of the deformable wall, textureless surface, specularities, and wide field of view image distortions, all challenges that our pipeline addresses. We conducted qualitative analysis on a synthetic dataset and quantitative analysis on a colon training model and real colonoscopy videos. The experiments show that our model predicts accurate scale-invariant depth maps and lumen segmentation from colonoscopy images in near real-time.
Evaluation of the potential of Near Infrared Hyperspectral Imaging for monitoring the invasive brown marmorated stink bug
Jan 19, 2023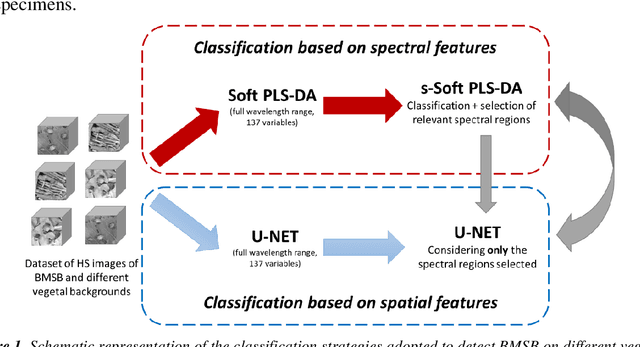
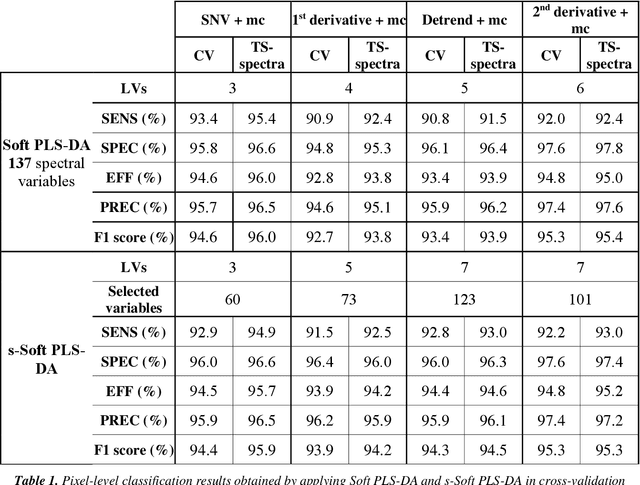
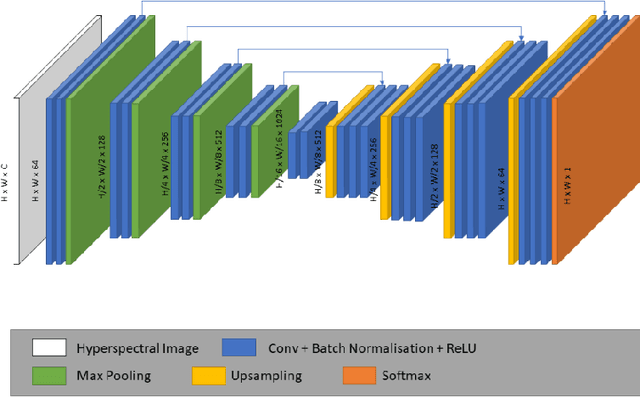
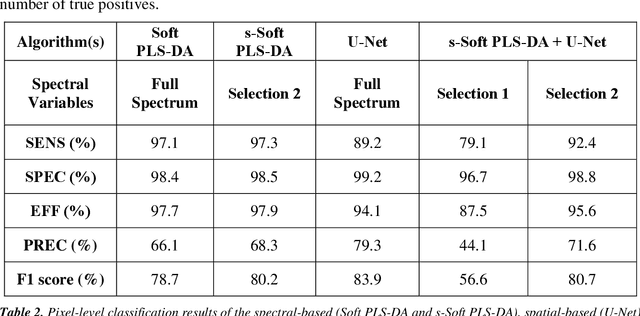
The brown marmorated stink bug (BMSB), Halyomorpha halys, is an invasive insect pest of global importance that damages several crops, compromising agri-food production. Field monitoring procedures are fundamental to perform risk assessment operations, in order to promptly face crop infestations and avoid economical losses. To improve pest management, spectral cameras mounted on Unmanned Aerial Vehicles (UAVs) and other Internet of Things (IoT) devices, such as smart traps or unmanned ground vehicles, could be used as an innovative technology allowing fast, efficient and real-time monitoring of insect infestations. The present study consists in a preliminary evaluation at the laboratory level of Near Infrared Hyperspectral Imaging (NIR-HSI) as a possible technology to detect BMSB specimens on different vegetal backgrounds, overcoming the problem of BMSB mimicry. Hyperspectral images of BMSB were acquired in the 980-1660 nm range, considering different vegetal backgrounds selected to mimic a real field application scene. Classification models were obtained following two different chemometric approaches. The first approach was focused on modelling spectral information and selecting relevant spectral regions for discrimination by means of sparse-based variable selection coupled with Soft Partial Least Squares Discriminant Analysis (s-Soft PLS-DA) classification algorithm. The second approach was based on modelling spatial and spectral features contained in the hyperspectral images using Convolutional Neural Networks (CNN). Finally, to further improve BMSB detection ability, the two strategies were merged, considering only the spectral regions selected by s-Soft PLS-DA for CNN modelling.
* Accepted manuscript
Learning Graph Search Heuristics
Dec 07, 2022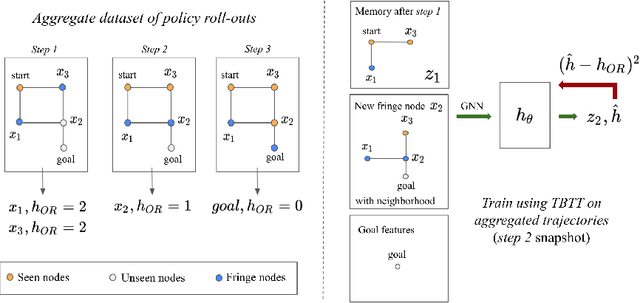
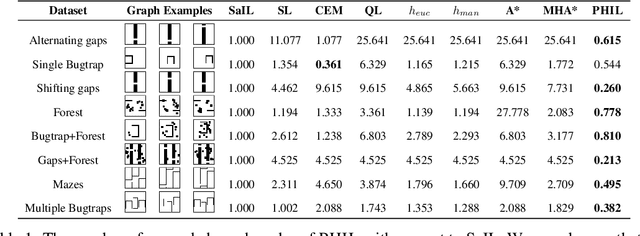

Searching for a path between two nodes in a graph is one of the most well-studied and fundamental problems in computer science. In numerous domains such as robotics, AI, or biology, practitioners develop search heuristics to accelerate their pathfinding algorithms. However, it is a laborious and complex process to hand-design heuristics based on the problem and the structure of a given use case. Here we present PHIL (Path Heuristic with Imitation Learning), a novel neural architecture and a training algorithm for discovering graph search and navigation heuristics from data by leveraging recent advances in imitation learning and graph representation learning. At training time, we aggregate datasets of search trajectories and ground-truth shortest path distances, which we use to train a specialized graph neural network-based heuristic function using backpropagation through steps of the pathfinding process. Our heuristic function learns graph embeddings useful for inferring node distances, runs in constant time independent of graph sizes, and can be easily incorporated in an algorithm such as A* at test time. Experiments show that PHIL reduces the number of explored nodes compared to state-of-the-art methods on benchmark datasets by 58.5\% on average, can be directly applied in diverse graphs ranging from biological networks to road networks, and allows for fast planning in time-critical robotics domains.
Leukemia detection based on microscopic blood smear images using deep learning
Dec 19, 2022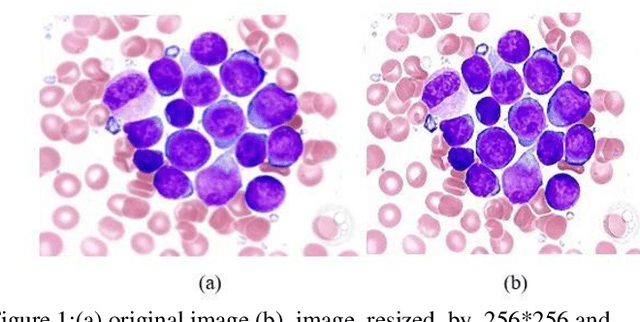
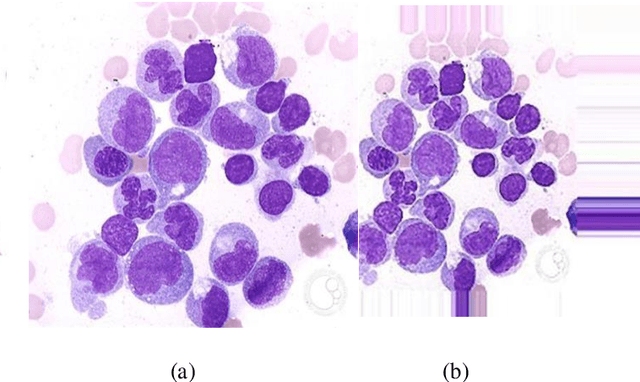
In this paper we discuss a new method for detecting leukemia in microscopic blood smear images using deep neural networks to diagnose leukemia early in blood. leukemia is considered one of the most dangerous mortality causes for a human being, the traditional process of diagnosis of leukemia in blood is complex, costly, and time-consuming, so patients could not receive medical treatment on time; Computer vision classification technique using deep learning can overcome the problems of traditional analysis of blood smears, our system for leukemia detection provides 97.3 % accuracy in classifying samples as cancerous or normal samples by taking a shot of blood smear and passing it as an input to the system that will check whether it contains cancer or not. In case of containing cancer cells, then the hematological expert passes the sample to a more complex device such as flow cytometry to generate complete information about the progress of cancer in the blood.
Neuro-DynaStress: Predicting Dynamic Stress Distributions in Structural Components
Dec 19, 2022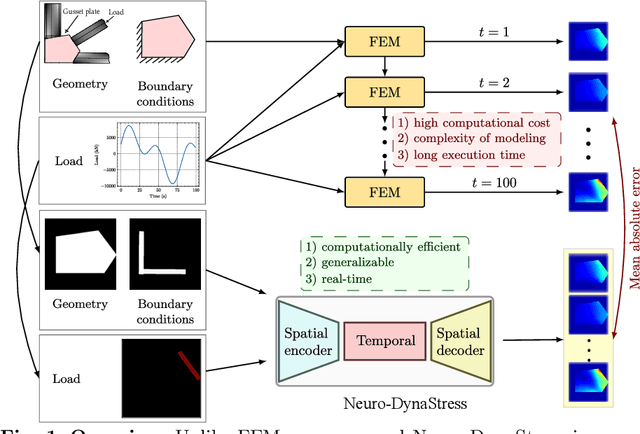
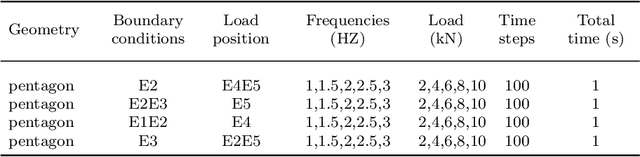
Structural components are typically exposed to dynamic loading, such as earthquakes, wind, and explosions. Structural engineers should be able to conduct real-time analysis in the aftermath or during extreme disaster events requiring immediate corrections to avoid fatal failures. As a result, it is crucial to predict dynamic stress distributions during highly disruptive events in real-time. Currently available high-fidelity methods, such as Finite Element Models (FEMs), suffer from their inherent high complexity and are computationally prohibitive. Therefore, to reduce computational cost while preserving accuracy, a deep learning model, Neuro-DynaStress, is proposed to predict the entire sequence of stress distribution based on finite element simulations using a partial differential equation (PDE) solver. The model was designed and trained to use the geometry, boundary conditions and sequence of loads as input and predict the sequences of high-resolution stress contours. The performance of the proposed framework is compared to finite element simulations using a PDE solver.
Managing Large Dataset Gaps in Urban Air Quality Prediction: DCU-Insight-AQ at MediaEval 2022
Dec 19, 2022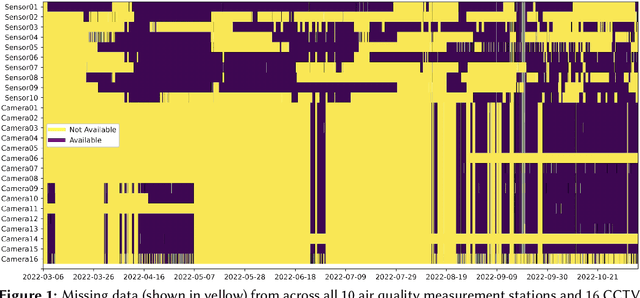
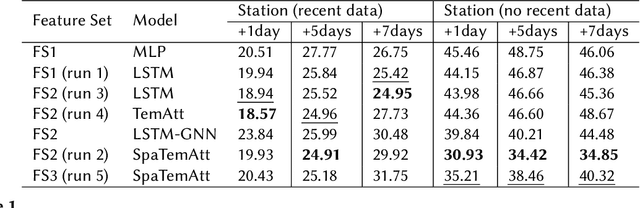
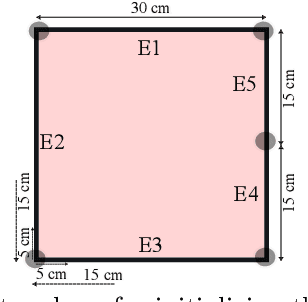
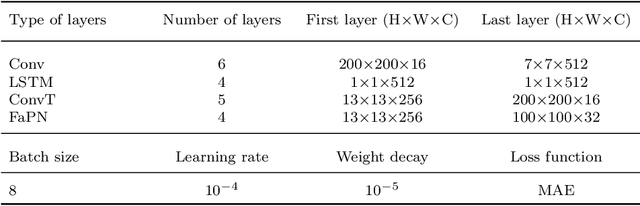
Calculating an Air Quality Index (AQI) typically uses data streams from air quality sensors deployed at fixed locations and the calculation is a real time process. If one or a number of sensors are broken or offline, then the real time AQI value cannot be computed. Estimating AQI values for some point in the future is a predictive process and uses historical AQI values to train and build models. In this work we focus on gap filling in air quality data where the task is to predict the AQI at 1, 5 and 7 days into the future. The scenario is where one or a number of air, weather and traffic sensors are offline and explores prediction accuracy under such situations. The work is part of the MediaEval'2022 Urban Air: Urban Life and Air Pollution task submitted by the DCU-Insight-AQ team and uses multimodal and crossmodal data consisting of AQI, weather and CCTV traffic images for air pollution prediction.
Constant Approximation for Normalized Modularity and Associations Clustering
Dec 29, 2022We study the problem of graph clustering under a broad class of objectives in which the quality of a cluster is defined based on the ratio between the number of edges in the cluster, and the total weight of vertices in the cluster. We show that our definition is closely related to popular clustering measures, namely normalized associations, which is a dual of the normalized cut objective, and normalized modularity. We give a linear time constant-approximate algorithm for our objective, which implies the first constant-factor approximation algorithms for normalized modularity and normalized associations.
An Anomaly Detection Method for Satellites Using Monte Carlo Dropout
Nov 27, 2022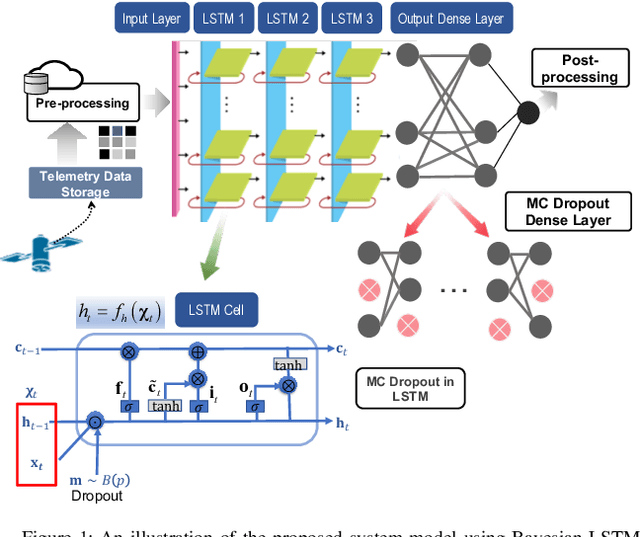
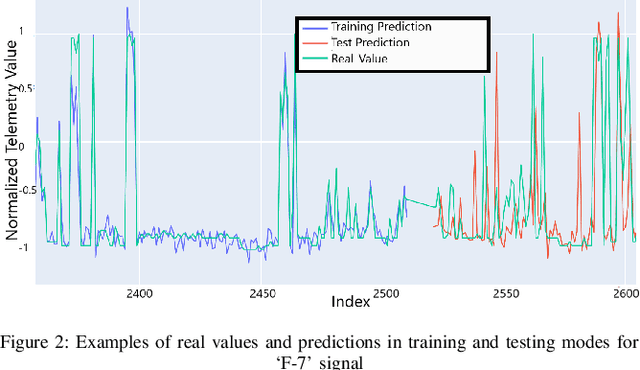
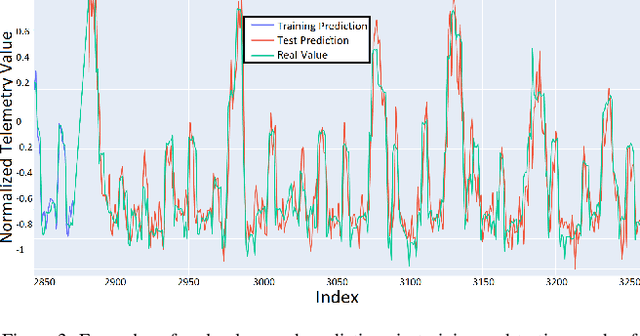
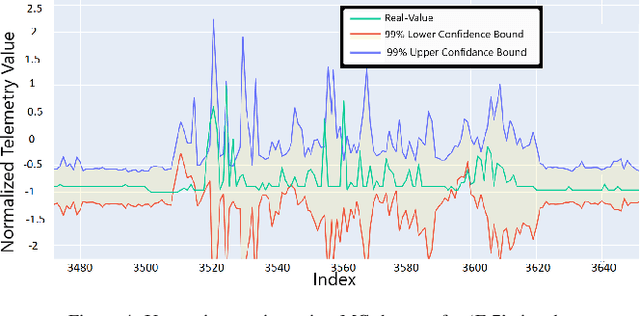
Recently, there has been a significant amount of interest in satellite telemetry anomaly detection (AD) using neural networks (NN). For AD purposes, the current approaches focus on either forecasting or reconstruction of the time series, and they cannot measure the level of reliability or the probability of correct detection. Although the Bayesian neural network (BNN)-based approaches are well known for time series uncertainty estimation, they are computationally intractable. In this paper, we present a tractable approximation for BNN based on the Monte Carlo (MC) dropout method for capturing the uncertainty in the satellite telemetry time series, without sacrificing accuracy. For time series forecasting, we employ an NN, which consists of several Long Short-Term Memory (LSTM) layers followed by various dense layers. We employ the MC dropout inside each LSTM layer and before the dense layers for uncertainty estimation. With the proposed uncertainty region and by utilizing a post-processing filter, we can effectively capture the anomaly points. Numerical results show that our proposed time series AD approach outperforms the existing methods from both prediction accuracy and AD perspectives.
R$^3$LIVE++: A Robust, Real-time, Radiance reconstruction package with a tightly-coupled LiDAR-Inertial-Visual state Estimator
Sep 08, 2022
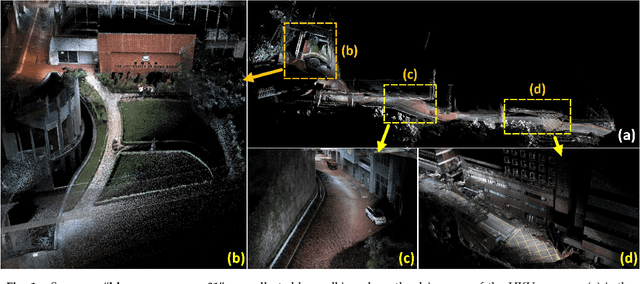
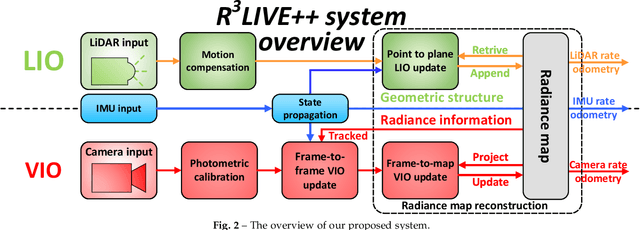
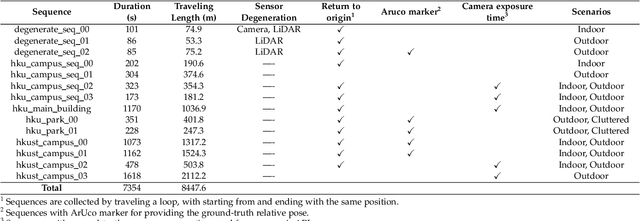
Simultaneous localization and mapping (SLAM) are crucial for autonomous robots (e.g., self-driving cars, autonomous drones), 3D mapping systems, and AR/VR applications. This work proposed a novel LiDAR-inertial-visual fusion framework termed R$^3$LIVE++ to achieve robust and accurate state estimation while simultaneously reconstructing the radiance map on the fly. R$^3$LIVE++ consists of a LiDAR-inertial odometry (LIO) and a visual-inertial odometry (VIO), both running in real-time. The LIO subsystem utilizes the measurements from a LiDAR for reconstructing the geometric structure (i.e., the positions of 3D points), while the VIO subsystem simultaneously recovers the radiance information of the geometric structure from the input images. R$^3$LIVE++ is developed based on R$^3$LIVE and further improves the accuracy in localization and mapping by accounting for the camera photometric calibration (e.g., non-linear response function and lens vignetting) and the online estimation of camera exposure time. We conduct more extensive experiments on both public and our private datasets to compare our proposed system against other state-of-the-art SLAM systems. Quantitative and qualitative results show that our proposed system has significant improvements over others in both accuracy and robustness. In addition, to demonstrate the extendability of our work, {we developed several applications based on our reconstructed radiance maps, such as high dynamic range (HDR) imaging, virtual environment exploration, and 3D video gaming.} Lastly, to share our findings and make contributions to the community, we make our codes, hardware design, and dataset publicly available on our Github: github.com/hku-mars/r3live
HOOD: Hierarchical Graphs for Generalized Modelling of Clothing Dynamics
Dec 14, 2022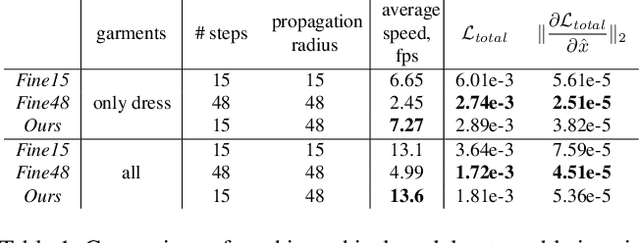
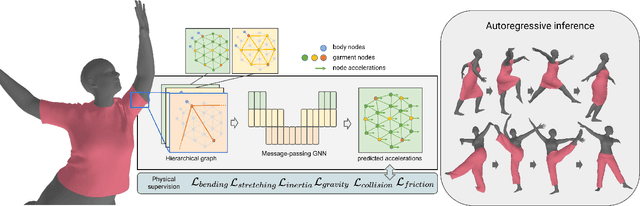
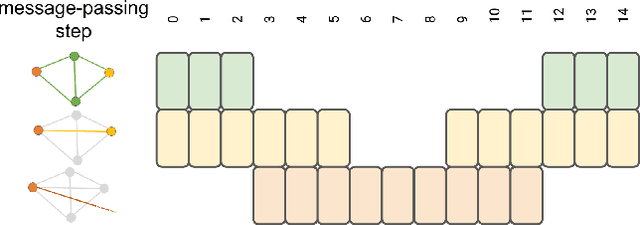
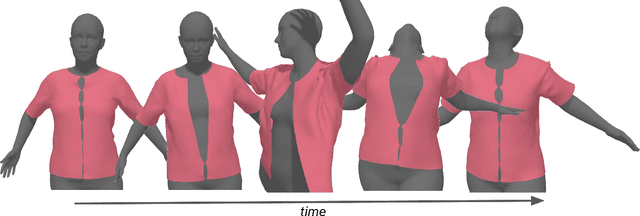
We propose a method that leverages graph neural networks, multi-level message passing, and unsupervised training to enable real-time prediction of realistic clothing dynamics. Whereas existing methods based on linear blend skinning must be trained for specific garments, our method is agnostic to body shape and applies to tight-fitting garments as well as loose, free-flowing clothing. Our method furthermore handles changes in topology (e.g., garments with buttons or zippers) and material properties at inference time. As one key contribution, we propose a hierarchical message-passing scheme that efficiently propagates stiff stretching modes while preserving local detail. We empirically show that our method outperforms strong baselines quantitatively and that its results are perceived as more realistic than state-of-the-art methods.