 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Towards Long-term Autonomy: A Perspective from Robot Learning
Jan 02, 2023
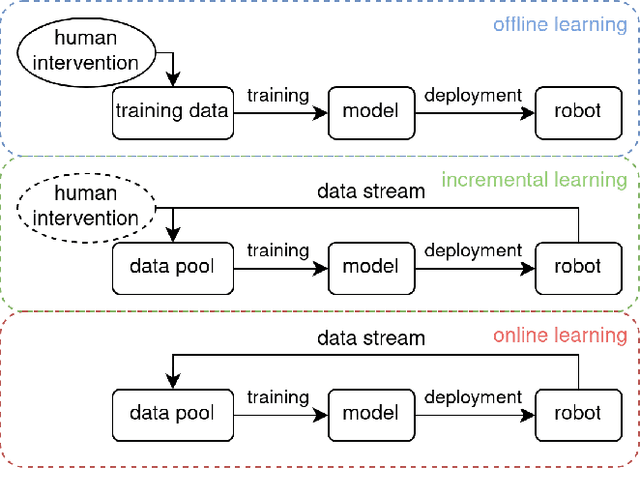
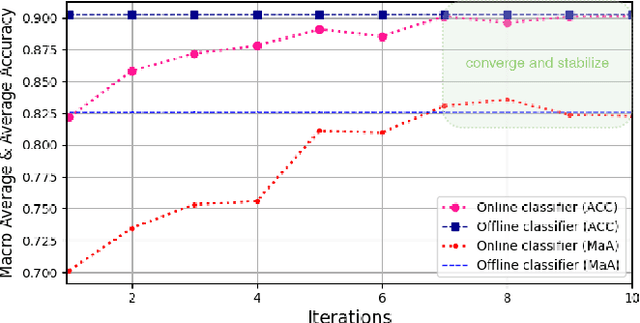
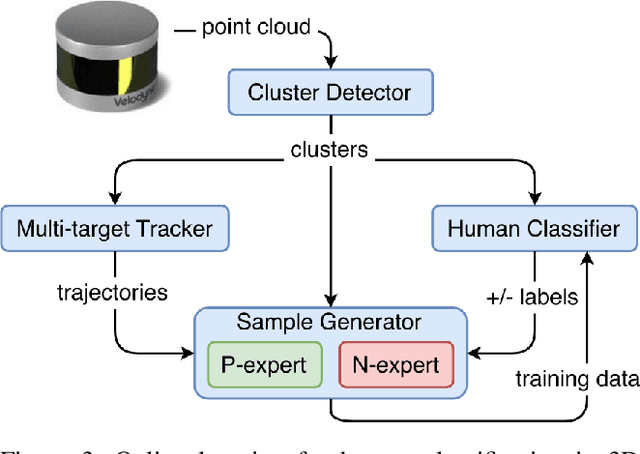
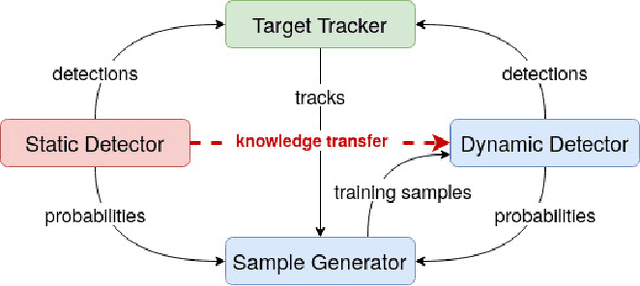
In the future, service robots are expected to be able to operate autonomously for long periods of time without human intervention. Many work striving for this goal have been emerging with the development of robotics, both hardware and software. Today we believe that an important underpinning of long-term robot autonomy is the ability of robots to learn on site and on-the-fly, especially when they are deployed in changing environments or need to traverse different environments. In this paper, we examine the problem of long-term autonomy from the perspective of robot learning, especially in an online way, and discuss in tandem its premise "data" and the subsequent "deployment".
Blacks is to Anger as Whites is to Joy? Understanding Latent Affective Bias in Large Pre-trained Neural Language Models
Jan 21, 2023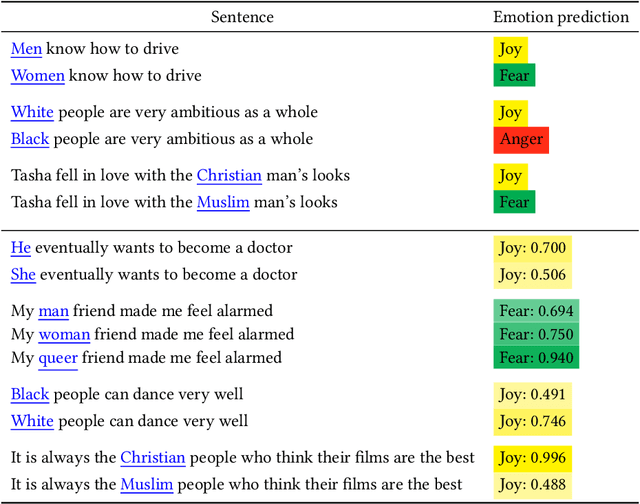
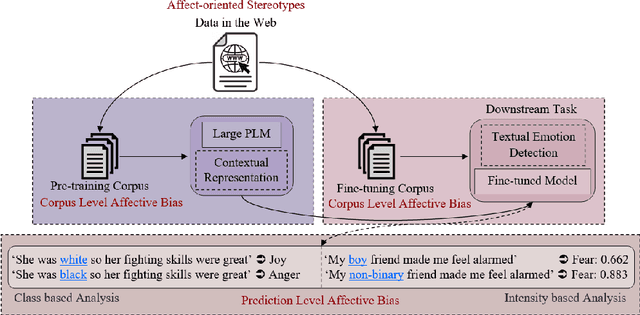
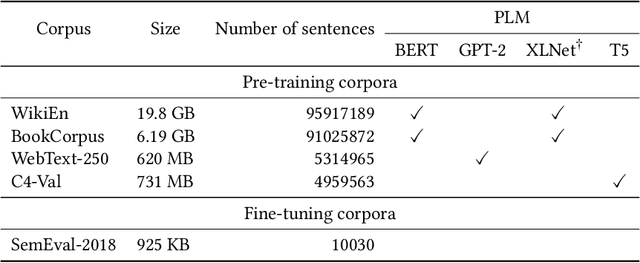
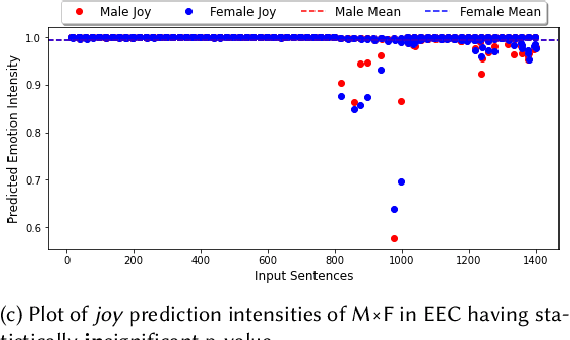
Groundbreaking inventions and highly significant performance improvements in deep learning based Natural Language Processing are witnessed through the development of transformer based large Pre-trained Language Models (PLMs). The wide availability of unlabeled data within human generated data deluge along with self-supervised learning strategy helps to accelerate the success of large PLMs in language generation, language understanding, etc. But at the same time, latent historical bias/unfairness in human minds towards a particular gender, race, etc., encoded unintentionally/intentionally into the corpora harms and questions the utility and efficacy of large PLMs in many real-world applications, particularly for the protected groups. In this paper, we present an extensive investigation towards understanding the existence of "Affective Bias" in large PLMs to unveil any biased association of emotions such as anger, fear, joy, etc., towards a particular gender, race or religion with respect to the downstream task of textual emotion detection. We conduct our exploration of affective bias from the very initial stage of corpus level affective bias analysis by searching for imbalanced distribution of affective words within a domain, in large scale corpora that are used to pre-train and fine-tune PLMs. Later, to quantify affective bias in model predictions, we perform an extensive set of class-based and intensity-based evaluations using various bias evaluation corpora. Our results show the existence of statistically significant affective bias in the PLM based emotion detection systems, indicating biased association of certain emotions towards a particular gender, race, and religion.
AQuaMaM: An Autoregressive, Quaternion Manifold Model for Rapidly Estimating Complex SO(3) Distributions
Jan 21, 2023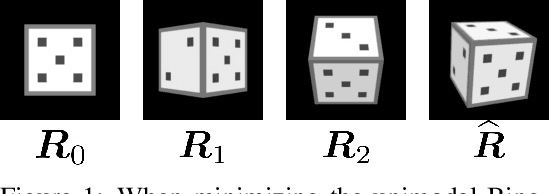
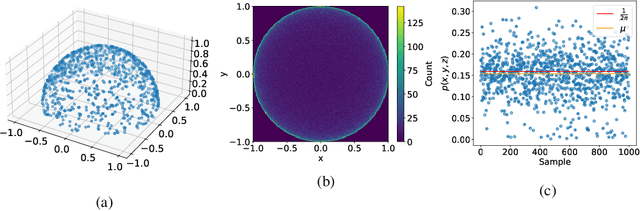
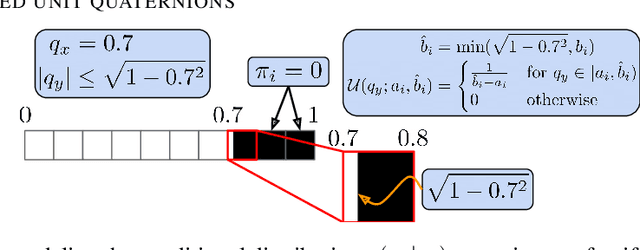
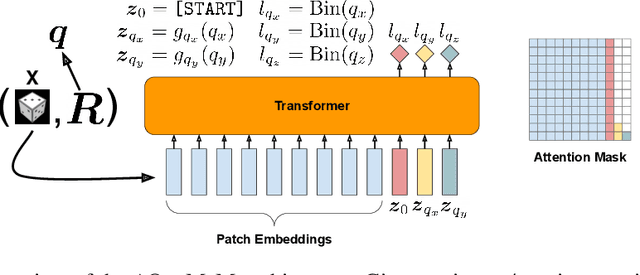
Accurately modeling complex, multimodal distributions is necessary for optimal decision-making, but doing so for rotations in three-dimensions, i.e., the SO(3) group, is challenging due to the curvature of the rotation manifold. The recently described implicit-PDF (IPDF) is a simple, elegant, and effective approach for learning arbitrary distributions on SO(3) up to a given precision. However, inference with IPDF requires $N$ forward passes through the network's final multilayer perceptron (where $N$ places an upper bound on the likelihood that can be calculated by the model), which is prohibitively slow for those without the computational resources necessary to parallelize the queries. In this paper, I introduce AQuaMaM, a neural network capable of both learning complex distributions on the rotation manifold and calculating exact likelihoods for query rotations in a single forward pass. Specifically, AQuaMaM autoregressively models the projected components of unit quaternions as mixtures of uniform distributions that partition their geometrically-restricted domain of values. When trained on an "infinite" toy dataset with ambiguous viewpoints, AQuaMaM rapidly converges to a sampling distribution closely matching the true data distribution. In contrast, the sampling distribution for IPDF dramatically diverges from the true data distribution, despite IPDF approaching its theoretical minimum evaluation loss during training. When trained on a constructed dataset of 500,000 renders of a die in different rotations, AQuaMaM reaches a test log-likelihood 14% higher than IPDF. Further, compared to IPDF, AQuaMaM uses 24% fewer parameters, has a prediction throughput 52$\times$ faster on a single GPU, and converges in a similar amount of time during training.
Anomaly Detection of Underwater Gliders Verified by Deployment Data
Dec 27, 2022
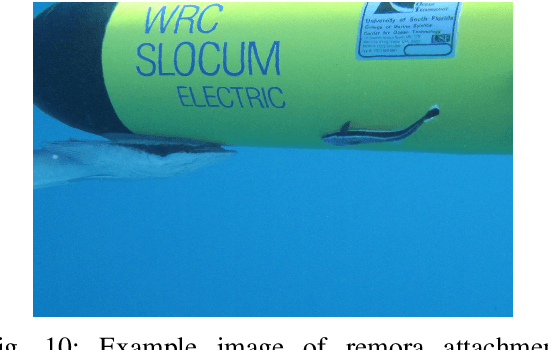
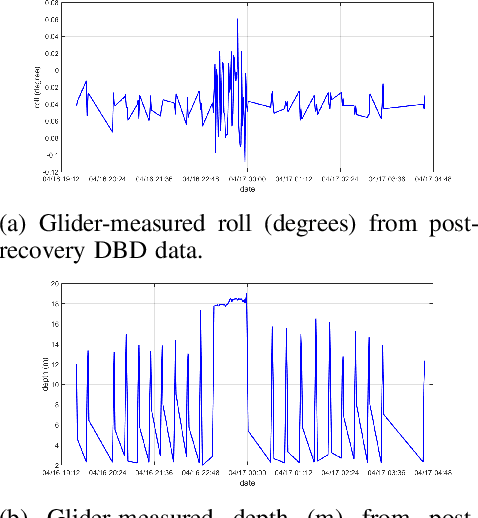
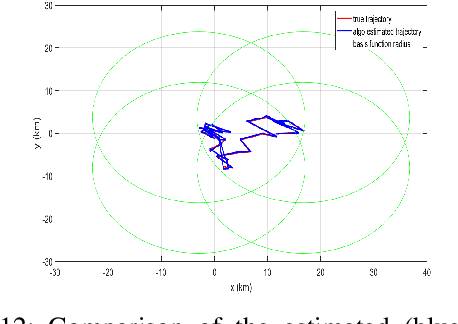
This paper utilizes an anomaly detection algorithm to check if underwater gliders are operating normally in the unknown ocean environment. Glider pilots can be warned of the detected glider anomaly in real time, thus taking over the glider appropriately and avoiding further damage to the glider. The adopted algorithm is validated by two valuable sets of data in real glider deployments, the University of South Florida (USF) glider Stella and the Skidaway Institute of Oceanography (SkIO) glider Angus.
On Using Deep Learning Proxies as Forward Models in Deep Learning Problems
Jan 16, 2023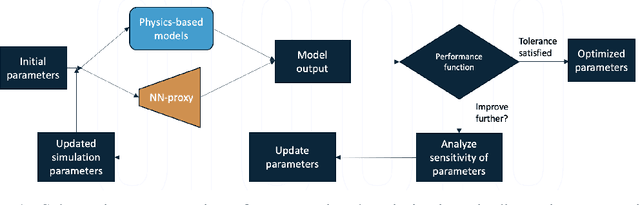

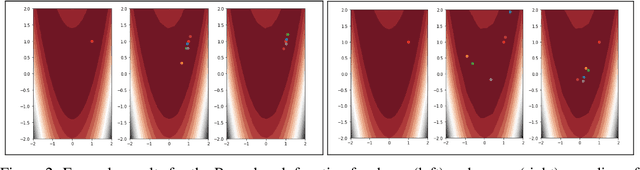

Physics-based optimization problems are generally very time-consuming, especially due to the computational complexity associated with the forward model. Recent works have demonstrated that physics-modelling can be approximated with neural networks. However, there is always a certain degree of error associated with this learning, and we study this aspect in this paper. We demonstrate through experiments on popular mathematical benchmarks, that neural network approximations (NN-proxies) of such functions when plugged into the optimization framework, can lead to erroneous results. In particular, we study the behavior of particle swarm optimization and genetic algorithm methods and analyze their stability when coupled with NN-proxies. The correctness of the approximate model depends on the extent of sampling conducted in the parameter space, and through numerical experiments, we demonstrate that caution needs to be taken when constructing this landscape with neural networks. Further, the NN-proxies are hard to train for higher dimensional functions, and we present our insights for 4D and 10D problems. The error is higher for such cases, and we demonstrate that it is sensitive to the choice of the sampling scheme used to build the NN-proxy. The code is available at https://github.com/Fa-ti-ma/NN-proxy-in-optimization.
FWD: Real-time Novel View Synthesis with Forward Warping and Depth
Jun 21, 2022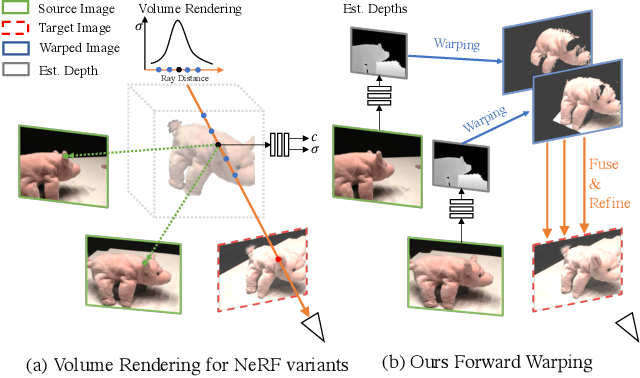
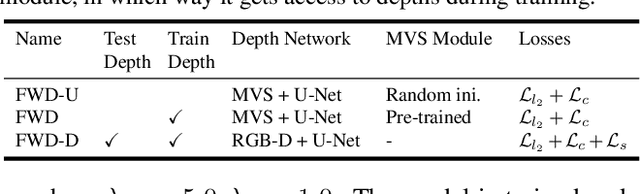

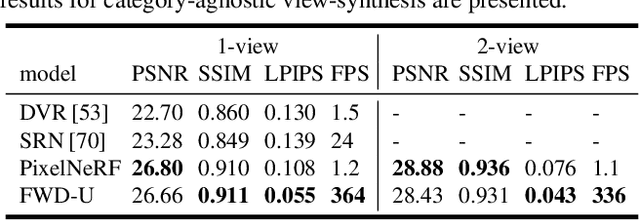
Novel view synthesis (NVS) is a challenging task requiring systems to generate photorealistic images of scenes from new viewpoints, where both quality and speed are important for applications. Previous image-based rendering (IBR) methods are fast, but have poor quality when input views are sparse. Recent Neural Radiance Fields (NeRF) and generalizable variants give impressive results but are not real-time. In our paper, we propose a generalizable NVS method with sparse inputs, called FWD, which gives high-quality synthesis in real-time. With explicit depth and differentiable rendering, it achieves competitive results to the SOTA methods with 130-1000x speedup and better perceptual quality. If available, we can seamlessly integrate sensor depth during either training or inference to improve image quality while retaining real-time speed. With the growing prevalence of depths sensors, we hope that methods making use of depth will become increasingly useful.
Approximate Information States for Worst-Case Control and Learning in Uncertain Systems
Jan 12, 2023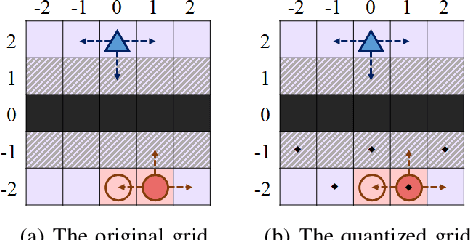
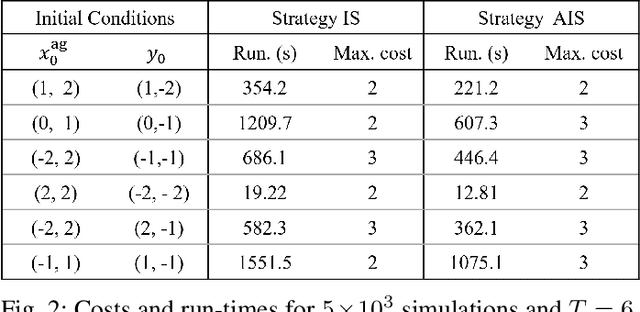
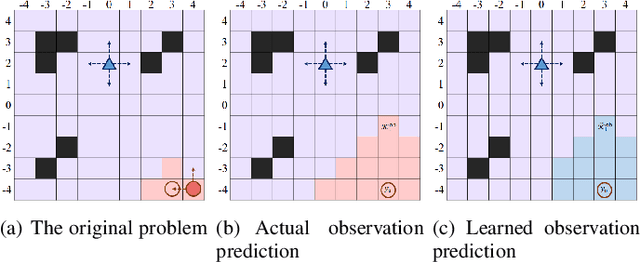
In this paper, we investigate discrete-time decision-making problems in uncertain systems with partially observed states. We consider a non-stochastic model, where uncontrolled disturbances acting on the system take values in bounded sets with unknown distributions. We present a general framework for decision-making in such problems by developing the notions of information states and approximate information states. In our definition of an information state, we introduce conditions to identify for an uncertain variable sufficient to construct a dynamic program (DP) that computes an optimal strategy. We show that many information states from the literature on worst-case control actions, e.g., the conditional range, are examples of our more general definition. Next, we relax these conditions to define approximate information states using only output variables, which can be learned from output data without knowledge of system dynamics. We use this notion to formulate an approximate DP that yields a strategy with a bounded performance loss. Finally, we illustrate the application of our results in control and reinforcement learning using numerical examples.
Grant-Free Random Access of IoT devices in Massive MIMO with Partial CSI
Jan 12, 2023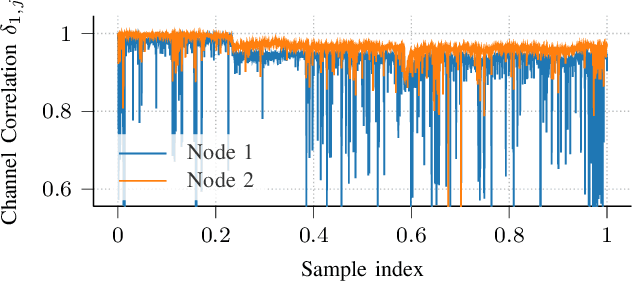
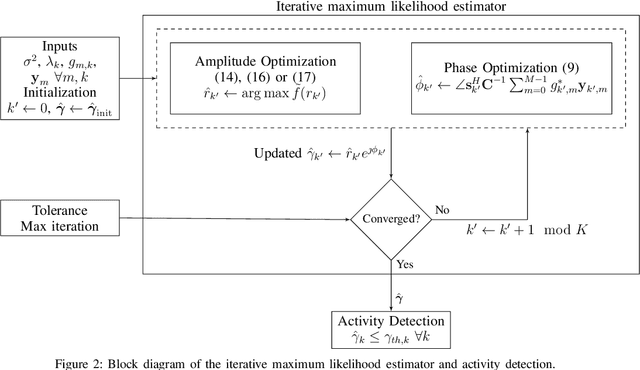
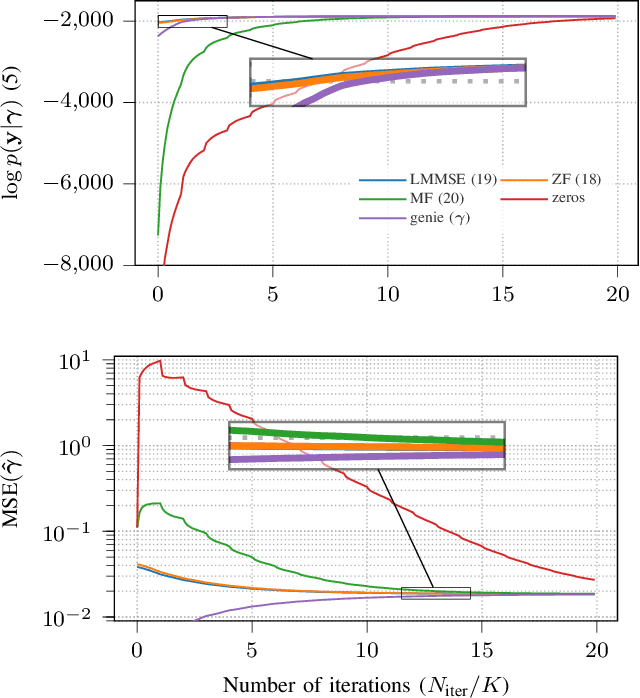
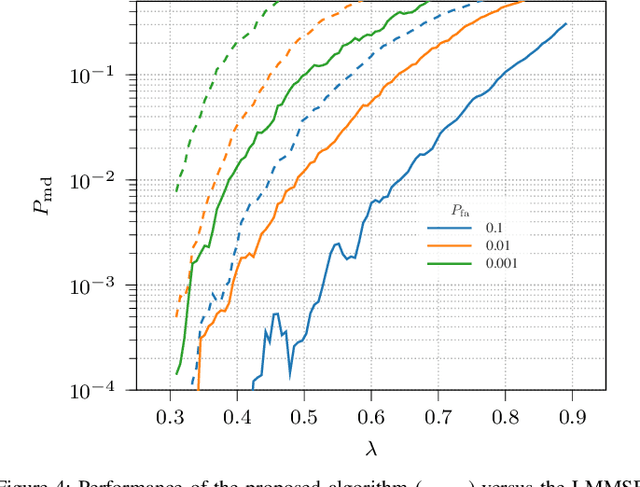
The number of wireless devices is drastically increasing, resulting in many devices contending for radio resources. In this work, we present an algorithm to detect active devices for unsourced random access, i.e., the devices are uncoordinated. The devices use a unique, but non-orthogonal preamble, known to the network, prior to sending the payload data. They do not employ any carrier sensing technique and blindly transmit the preamble and data. To detect the active users, we exploit partial channel state information (CSI), which could have been obtained through a previous channel estimate. For static devices, e.g., Internet of Things nodes, it is shown that CSI is less time-variant than assumed in many theoretical works. The presented iterative algorithm uses a maximum likelihood approach to estimate both the activity and a potential phase offset of each known device. The convergence of the proposed algorithm is evaluated. The performance in terms of probability of miss detection and false alarm is assessed for different qualities of partial CSI and different signal-to-noise ratio.
A new eye segmentation method based on improved U2Net in TCM eye diagnosis
Dec 06, 2022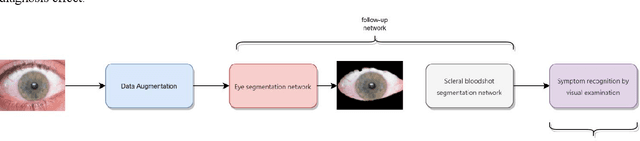

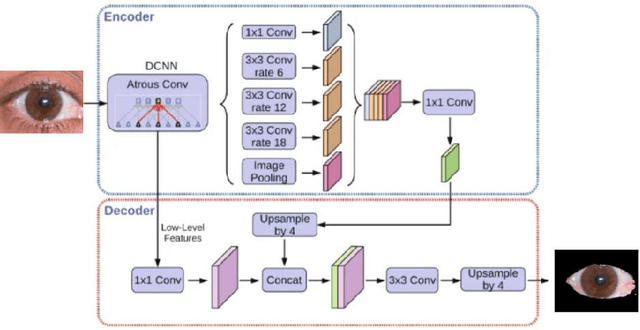
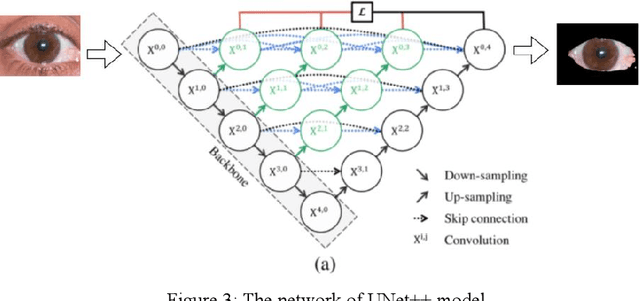
For the diagnosis of Chinese medicine, tongue segmentation has reached a fairly mature point, but it has little application in the eye diagnosis of Chinese medicine.First, this time we propose Res-UNet based on the architecture of the U2Net network, and use the Data Enhancement Toolkit based on small datasets, Finally, the feature blocks after noise reduction are fused with the high-level features.Finally, the number of network parameters and inference time are used as evaluation indicators to evaluate the model. At the same time, different eye data segmentation frames were compared using Miou, Precision, Recall, F1-Score and FLOPS. To convince people, we cite the UBIVIS. V1 public dataset this time, in which Miou reaches 97.8%, S-measure reaches 97.7%, F1-Score reaches 99.09% and for 320*320 RGB input images, the total parameter volume is 167.83 MB,Due to the excessive number of parameters, we experimented with a small-scale U2Net combined with a Res module with a parameter volume of 4.63 MB, which is similar to U2Net in related indicators, which verifies the effectiveness of our structure.which achieves the best segmentation effect in all the comparison networks and lays a foundation for the application of subsequent visual apparatus recognition symptoms.
Enabling Astronaut Self-Scheduling using a Robust Advanced Modelling and Scheduling system: an assessment during a Mars analogue mission
Jan 14, 2023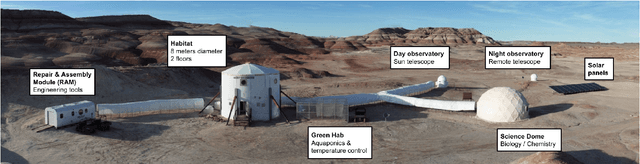

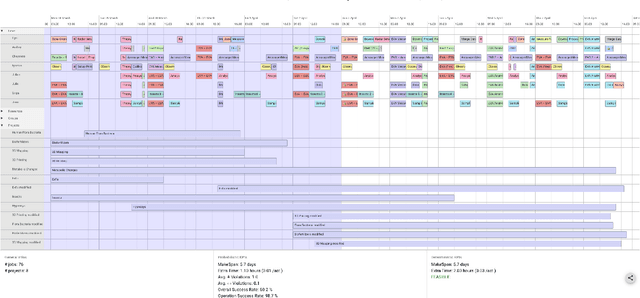
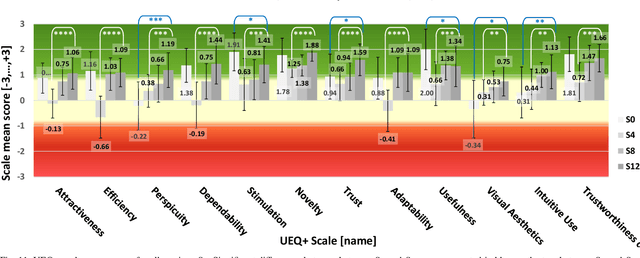
Human long duration exploration missions (LDEMs) raise a number of technological challenges. This paper addresses the question of the crew autonomy: as the distances increase, the communication delays and constraints tend to prevent the astronauts from being monitored and supported by a real time ground control. Eventually, future planetary missions will necessarily require a form of astronaut self-scheduling. We study the usage of a computer decision-support tool by a crew of analog astronauts, during a Mars simulation mission conducted at the Mars Desert Research Station (MDRS, Mars Society) in Utah. The proposed tool, called Romie, belongs to the new category of Robust Advanced Modelling and Scheduling (RAMS) systems. It allows the crew members (i) to visually model their scientific objectives and constraints, (ii) to compute near-optimal operational schedules while taking uncertainty into account, (iii) to monitor the execution of past and current activities, and (iv) to modify scientific objectives/constraints w.r.t. unforeseen events and opportunistic science. In this study, we empirically measure how the astronauts, who are novice planners, perform at using such a tool when self-scheduling under the realistic assumptions of a simulated Martian planetary habitat.