 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
A Comprehensive Study of Real-Time Object Detection Networks Across Multiple Domains: A Survey
Aug 23, 2022

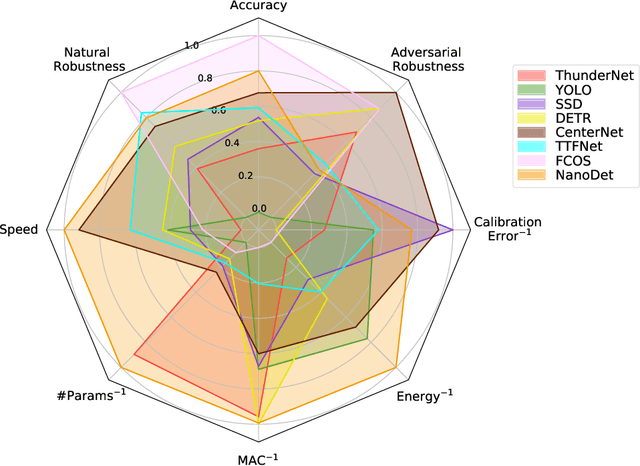
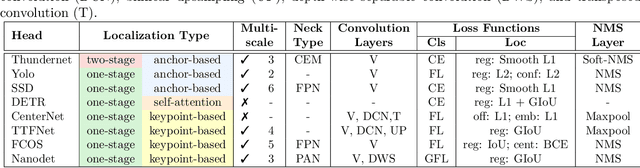
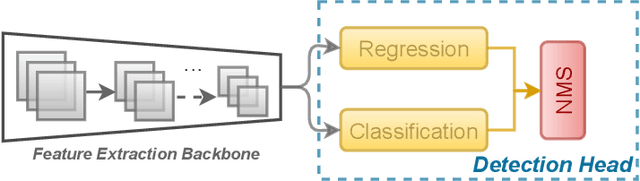
Deep neural network based object detectors are continuously evolving and are used in a multitude of applications, each having its own set of requirements. While safety-critical applications need high accuracy and reliability, low-latency tasks need resource and energy-efficient networks. Real-time detectors, which are a necessity in high-impact real-world applications, are continuously proposed, but they overemphasize the improvements in accuracy and speed while other capabilities such as versatility, robustness, resource and energy efficiency are omitted. A reference benchmark for existing networks does not exist, nor does a standard evaluation guideline for designing new networks, which results in ambiguous and inconsistent comparisons. We, thus, conduct a comprehensive study on multiple real-time detectors (anchor-, keypoint-, and transformer-based) on a wide range of datasets and report results on an extensive set of metrics. We also study the impact of variables such as image size, anchor dimensions, confidence thresholds, and architecture layers on the overall performance. We analyze the robustness of detection networks against distribution shifts, natural corruptions, and adversarial attacks. Also, we provide a calibration analysis to gauge the reliability of the predictions. Finally, to highlight the real-world impact, we conduct two unique case studies, on autonomous driving and healthcare applications. To further gauge the capability of networks in critical real-time applications, we report the performance after deploying the detection networks on edge devices. Our extensive empirical study can act as a guideline for the industrial community to make an informed choice on the existing networks. We also hope to inspire the research community towards a new direction in the design and evaluation of networks that focuses on a bigger and holistic overview for a far-reaching impact.
* Published in Transactions on Machine Learning Research (TMLR) with Survey Certification
Codebook Based Two-Time Scale Resource Allocation Design for IRS-Assisted eMBB-URLLC Systems
Aug 07, 2022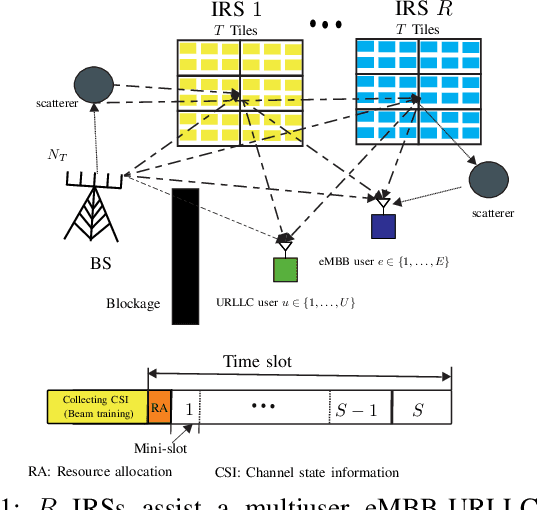
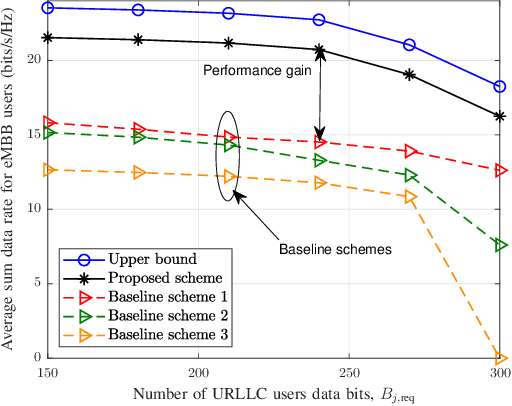
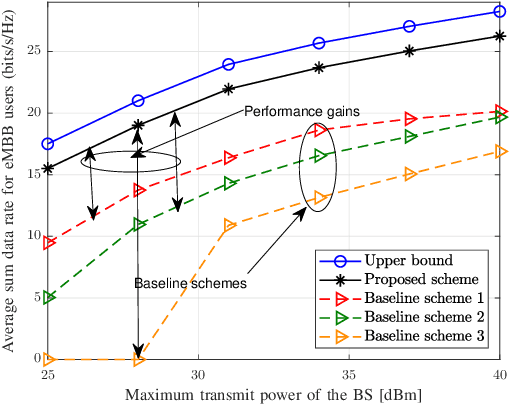
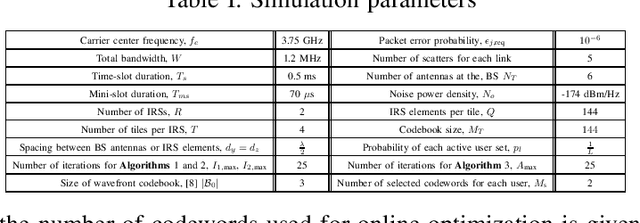
This paper investigates the resource allocation algorithm design for wireless systems assisted by large intelligent reflecting surfaces (IRSs) with coexisting enhanced mobile broadband (eMBB) and ultra reliable low-latency communication (URLLC) users. We consider a two-time scale resource allocation scheme, whereby the base station's precoders are optimized in each mini-slot to adapt to newly arriving URLLC traffic, whereas the IRS phase shifts are reconfigured only in each time slot to avoid excessive base station-IRS signaling. To facilitate efficient resource allocation design for large IRSs, we employ a codebook-based optimization framework, where the IRS is divided into several tiles and the phase-shift elements of each tile are selected from a pre-defined codebook. The resource allocation algorithm design is formulated as an optimization problem for the maximization of the average sum data rate of the eMBB users over a time slot while guaranteeing the quality-of-service (QoS) of each URLLC user in each mini-slot. An iterative algorithm based on alternating optimization (AO) is proposed to find a high-quality suboptimal solution. As a case study, the proposed algorithm is applied in an industrial indoor environment modelled via the Quadriga channel simulator. Our simulation results show that the proposed algorithm design enables the coexistence of eMBB and URLLC users and yields large performance gains compared to three baseline schemes. Furthermore, our simulation results reveal that the proposed two-time scale resource allocation design incurs only a small performance loss compared to the case when the IRSs are optimized in each mini-slot.
Don't Play Favorites: Minority Guidance for Diffusion Models
Jan 29, 2023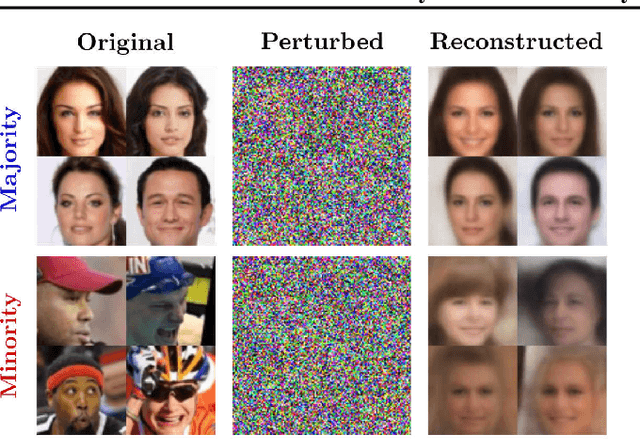
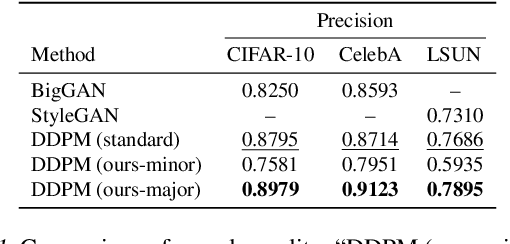
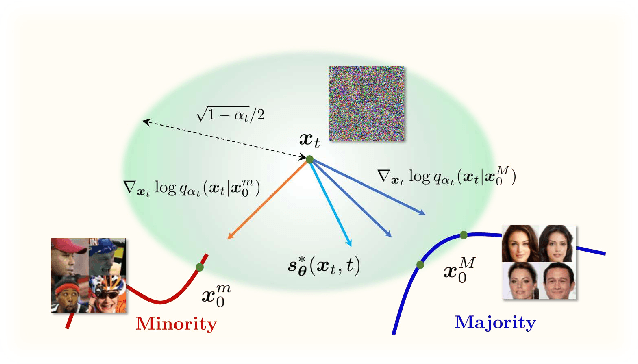
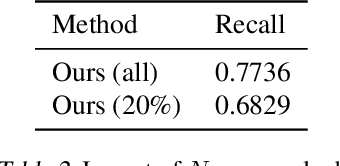
We explore the problem of generating minority samples using diffusion models. The minority samples are instances that lie on low-density regions of a data manifold. Generating sufficient numbers of such minority instances is important, since they often contain some unique attributes of the data. However, the conventional generation process of the diffusion models mostly yields majority samples (that lie on high-density regions of the manifold) due to their high likelihoods, making themselves highly ineffective and time-consuming for the task. In this work, we present a novel framework that can make the generation process of the diffusion models focus on the minority samples. We first provide a new insight on the majority-focused nature of the diffusion models: they denoise in favor of the majority samples. The observation motivates us to introduce a metric that describes the uniqueness of a given sample. To address the inherent preference of the diffusion models w.r.t. the majority samples, we further develop minority guidance, a sampling technique that can guide the generation process toward regions with desired likelihood levels. Experiments on benchmark real datasets demonstrate that our minority guidance can greatly improve the capability of generating the low-likelihood minority samples over existing generative frameworks including the standard diffusion sampler.
Generating Novel, Designable, and Diverse Protein Structures by Equivariantly Diffusing Oriented Residue Clouds
Jan 29, 2023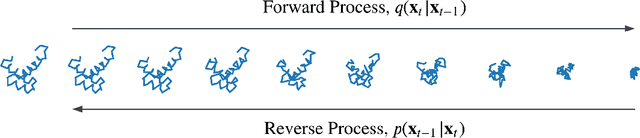
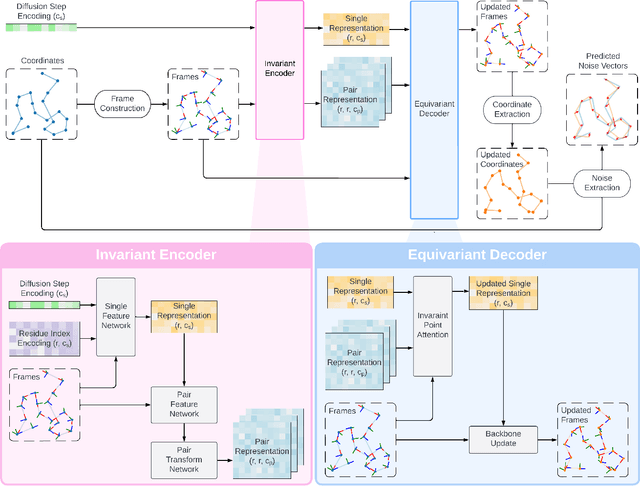
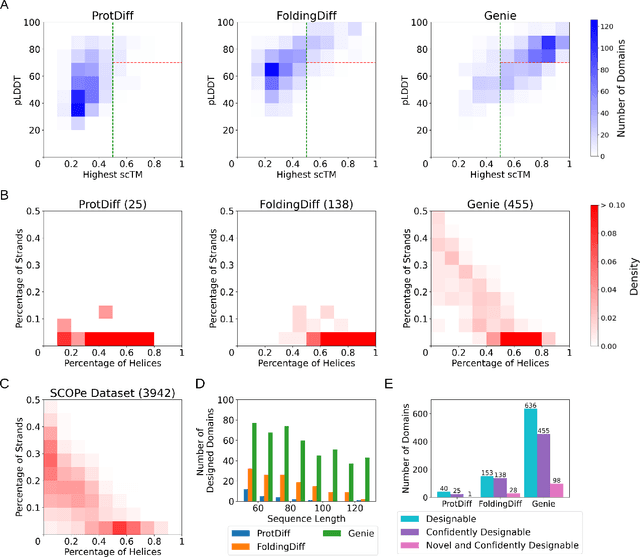
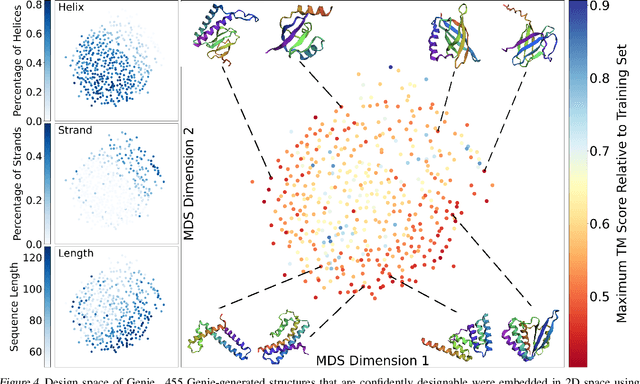
Proteins power a vast array of functional processes in living cells. The capability to create new proteins with designed structures and functions would thus enable the engineering of cellular behavior and development of protein-based therapeutics and materials. Structure-based protein design aims to find structures that are designable (can be realized by a protein sequence), novel (have dissimilar geometry from natural proteins), and diverse (span a wide range of geometries). While advances in protein structure prediction have made it possible to predict structures of novel protein sequences, the combinatorially large space of sequences and structures limits the practicality of search-based methods. Generative models provide a compelling alternative, by implicitly learning the low-dimensional structure of complex data distributions. Here, we leverage recent advances in denoising diffusion probabilistic models and equivariant neural networks to develop Genie, a generative model of protein structures that performs discrete-time diffusion using a cloud of oriented reference frames in 3D space. Through in silico evaluations, we demonstrate that Genie generates protein backbones that are more designable, novel, and diverse than existing models. This indicates that Genie is capturing key aspects of the distribution of protein structure space and facilitates protein design with high success rates.
Deep Reinforcement Learning for Traffic Light Control in Intelligent Transportation Systems
Feb 04, 2023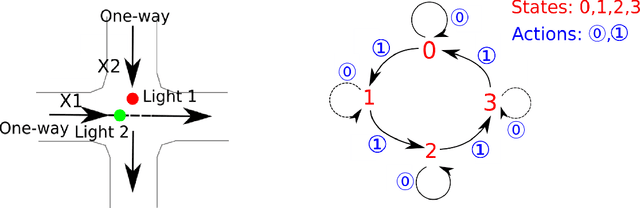
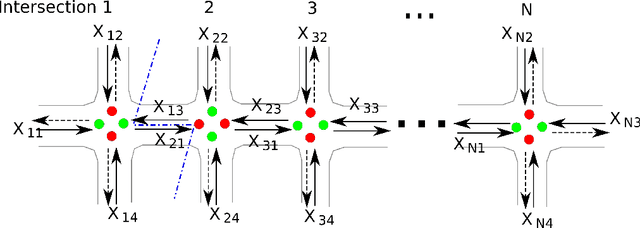
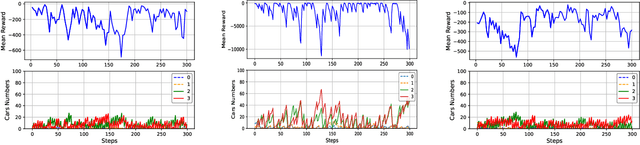
Smart traffic lights in intelligent transportation systems (ITSs) are envisioned to greatly increase traffic efficiency and reduce congestion. Deep reinforcement learning (DRL) is a promising approach to adaptively control traffic lights based on the real-time traffic situation in a road network. However, conventional methods may suffer from poor scalability. In this paper, we investigate deep reinforcement learning to control traffic lights, and both theoretical analysis and numerical experiments show that the intelligent behavior ``greenwave" (i.e., a vehicle will see a progressive cascade of green lights, and not have to brake at any intersection) emerges naturally a grid road network, which is proved to be the optimal policy in an avenue with multiple cross streets. As a first step, we use two DRL algorithms for the traffic light control problems in two scenarios. In a single road intersection, we verify that the deep Q-network (DQN) algorithm delivers a thresholding policy; and in a grid road network, we adopt the deep deterministic policy gradient (DDPG) algorithm. Secondly, numerical experiments show that the DQN algorithm delivers the optimal control, and the DDPG algorithm with passive observations has the capability to produce on its own a high-level intelligent behavior in a grid road network, namely, the ``greenwave" policy emerges. We also verify the ``greenwave" patterns in a $5 \times 10$ grid road network. Thirdly, the ``greenwave" patterns demonstrate that DRL algorithms produce favorable solutions since the ``greenwave" policy shown in experiment results is proved to be optimal in a specified traffic model (an avenue with multiple cross streets). The delivered policies both in a single road intersection and a grid road network demonstrate the scalability of DRL algorithms.
* 17 pages
MEMO : Accelerating Transformers with Memoization on Big Memory Systems
Jan 23, 2023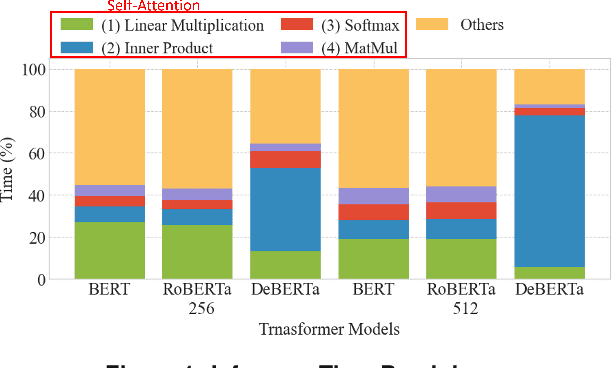
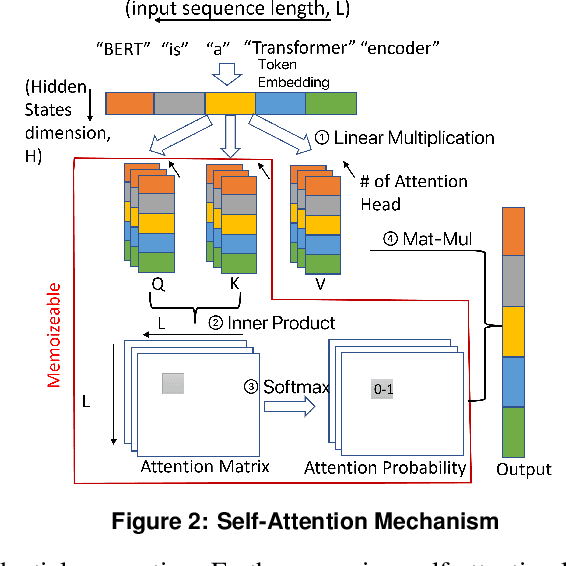
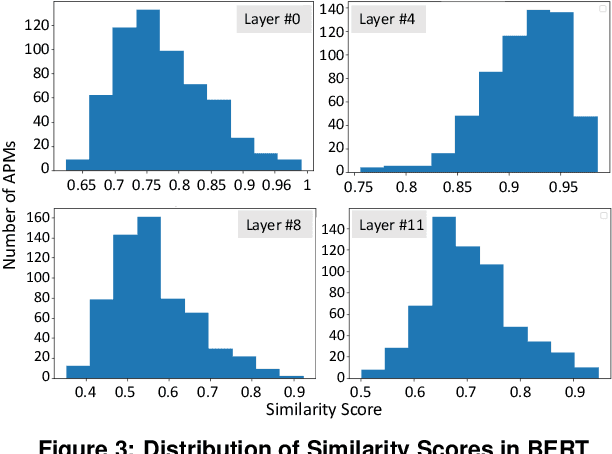
Transformers gain popularity because of their superior prediction accuracy and inference throughput. However, the transformer is computation-intensive, causing a long inference time. The existing work to accelerate transformer inferences has limitations because of the changes to transformer architectures or the need for specialized hardware. In this paper, we identify the opportunities of using memoization to accelerate the attention mechanism in transformers without the above limitation. Built upon a unique observation that there is a rich similarity in attention computation across inference sequences, we build an attention database upon the emerging big memory system. We introduce the embedding technique to find semantically similar inputs to identify computation similarity. We also introduce a series of techniques such as memory mapping and selective memoization to avoid memory copy and unnecessary overhead. We enable 21% performance improvement on average (up to 68%) with the TB-scale attention database and with ignorable loss in inference accuracy.
Federated Sufficient Dimension Reduction Through High-Dimensional Sparse Sliced Inverse Regression
Jan 23, 2023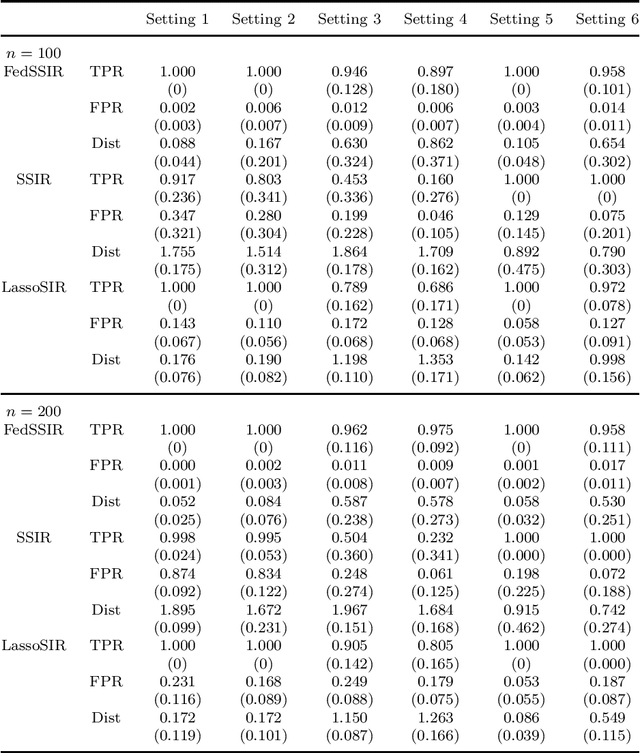
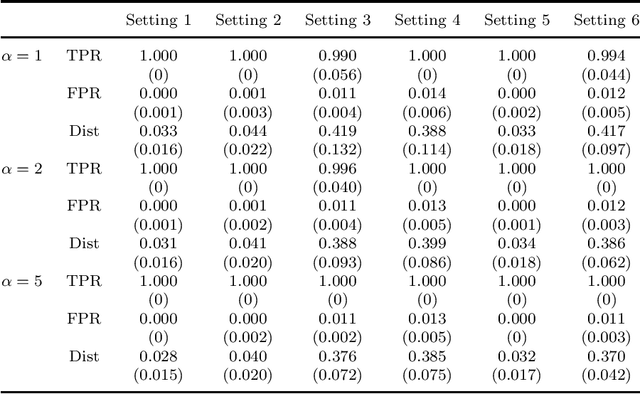
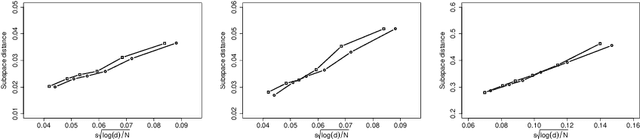
Federated learning has become a popular tool in the big data era nowadays. It trains a centralized model based on data from different clients while keeping data decentralized. In this paper, we propose a federated sparse sliced inverse regression algorithm for the first time. Our method can simultaneously estimate the central dimension reduction subspace and perform variable selection in a federated setting. We transform this federated high-dimensional sparse sliced inverse regression problem into a convex optimization problem by constructing the covariance matrix safely and losslessly. We then use a linearized alternating direction method of multipliers algorithm to estimate the central subspace. We also give approaches of Bayesian information criterion and hold-out validation to ascertain the dimension of the central subspace and the hyper-parameter of the algorithm. We establish an upper bound of the statistical error rate of our estimator under the heterogeneous setting. We demonstrate the effectiveness of our method through simulations and real world applications.
Learning to Control and Coordinate Hybrid Traffic Through Robot Vehicles at Complex and Unsignalized Intersections
Jan 12, 2023
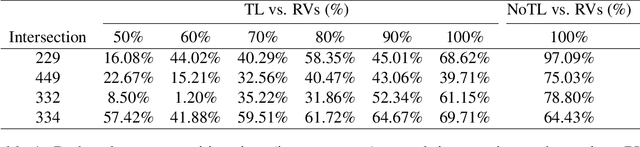
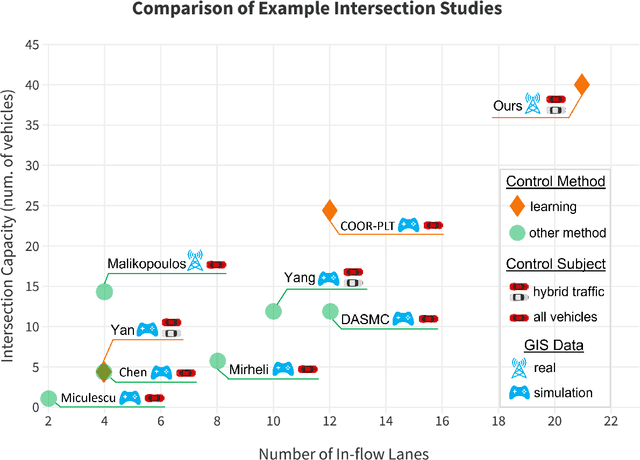
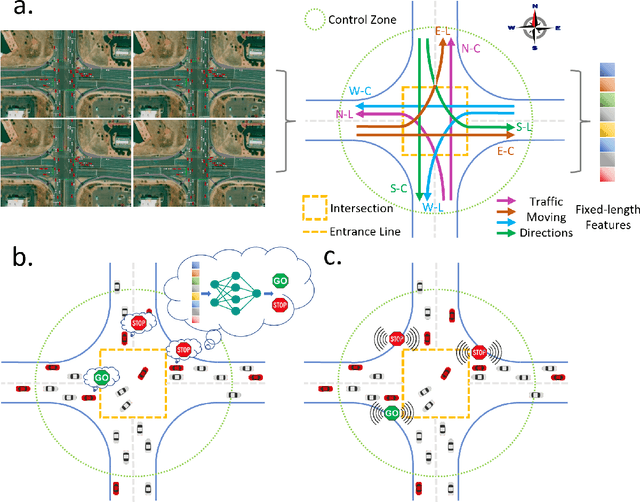
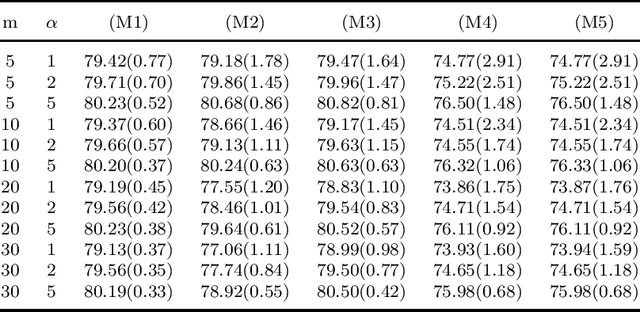
Intersections are essential road infrastructures for traffic in modern metropolises; however, they can also be the bottleneck of traffic flows due to traffic incidents or the absence of traffic coordination mechanisms such as traffic lights. Thus, various control and coordination mechanisms that are beyond traditional control methods have been proposed to improve the efficiency of intersection traffic. Amongst these methods, the control of foreseeable hybrid traffic that consists of human-driven vehicles (HVs) and robot vehicles (RVs) has recently emerged. We propose a decentralized reinforcement learning approach for the control and coordination of hybrid traffic at real-world, complex intersections--a topic that has not been previously explored. Comprehensive experiments are conducted to show the effectiveness of our approach. In particular, we show that using 5% RVs, we can prevent congestion formation inside the intersection under the actual traffic demand of 700 vehicles per hour. In contrast, without RVs, congestion starts to develop when the traffic demand reaches as low as 200 vehicles per hour. Further performance gains (reduced waiting time of vehicles at the intersection) are obtained as the RV penetration rate increases. When there exist more than 50% RVs in traffic, our method starts to outperform traffic signals on the average waiting time of all vehicles at the intersection. Our method is also robust against both blackout events and sudden RV percentage drops, and enjoys excellent generalizablility, which is illustrated by its successful deployment in two unseen intersections.
ImMesh: An Immediate LiDAR Localization and Meshing Framework
Jan 12, 2023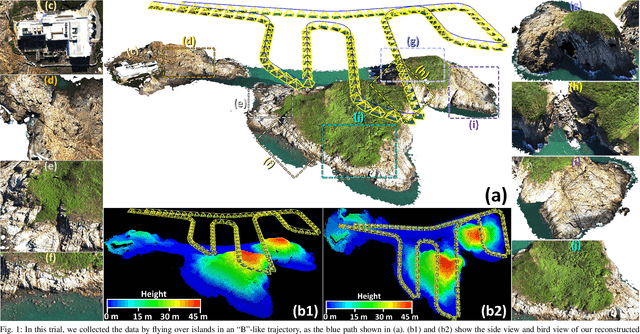
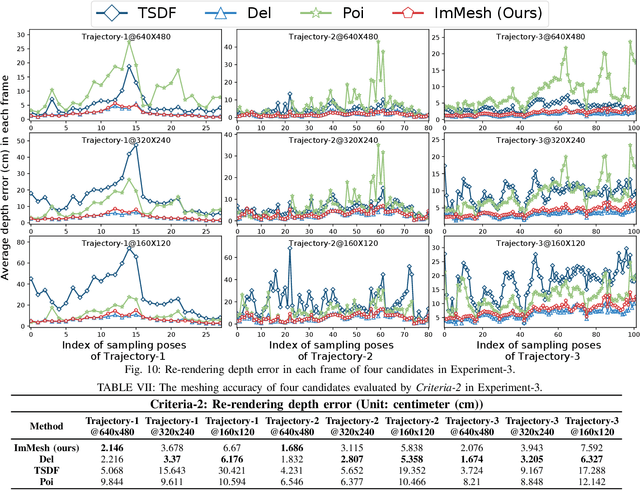
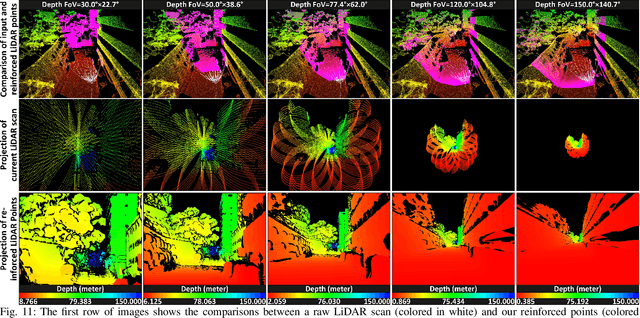
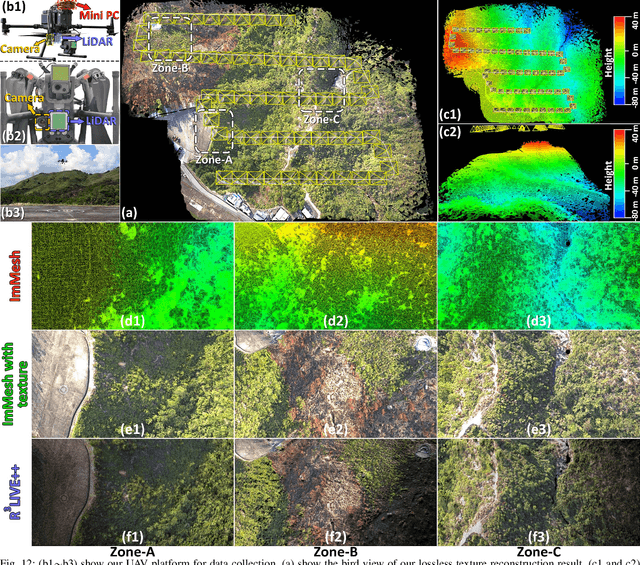
In this paper, we propose a novel LiDAR(-inertial) odometry and mapping framework to achieve the goal of simultaneous localization and meshing in real-time. This proposed framework termed ImMesh comprises four tightly-coupled modules: receiver, localization, meshing, and broadcaster. The localization module utilizes the prepossessed sensor data from the receiver, estimates the sensor pose online by registering LiDAR scans to maps, and dynamically grows the map. Then, our meshing module takes the registered LiDAR scan for incrementally reconstructing the triangle mesh on the fly. Finally, the real-time odometry, map, and mesh are published via our broadcaster. The key contribution of this work is the meshing module, which represents a scene by an efficient hierarchical voxels structure, performs fast finding of voxels observed by new scans, and reconstructs triangle facets in each voxel in an incremental manner. This voxel-wise meshing operation is delicately designed for the purpose of efficiency; it first performs a dimension reduction by projecting 3D points to a 2D local plane contained in the voxel, and then executes the meshing operation with pull, commit and push steps for incremental reconstruction of triangle facets. To the best of our knowledge, this is the first work in literature that can reconstruct online the triangle mesh of large-scale scenes, just relying on a standard CPU without GPU acceleration. To share our findings and make contributions to the community, we make our code publicly available on our GitHub: https://github.com/hku-mars/ImMesh.
A Comparison between RSMA, SDMA, and OMA in Multibeam LEO Satellite Systems
Jan 27, 2023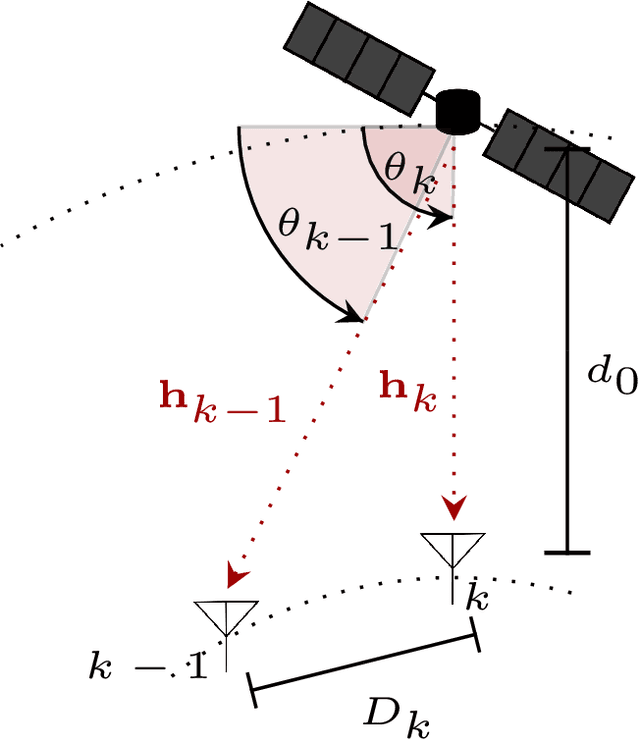
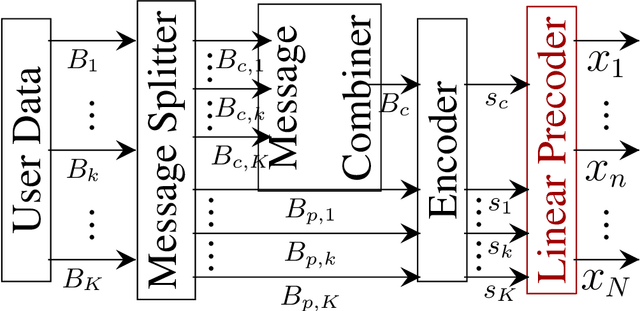
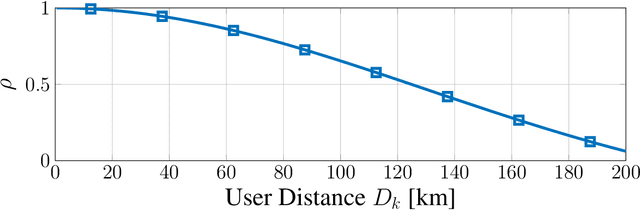
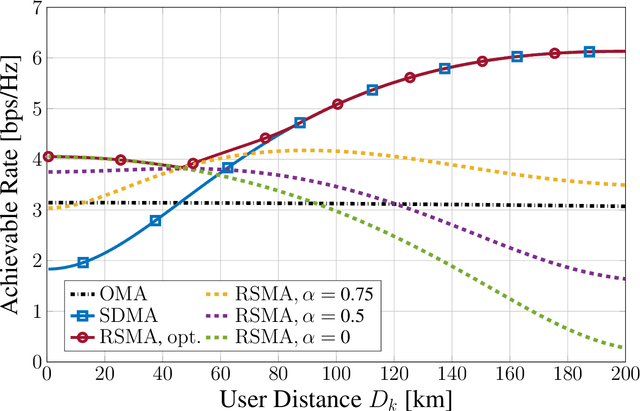
Low Earth orbit (LEO) satellite systems enable close to global coverage and are therefore expected to become important pillars of future communication standards. However, a particular challenge faced by LEO satellites is the high orbital velocities due to which a precise channel estimation is difficult. We model this influence as an erroneous angle of departure (AoD), which corresponds to imperfect channel state information (CSI) at the transmitter (CSIT). Poor CSIT and non-orthogonal user channels degrade the performance of space-division multiple access (SDMA) precoding by increasing inter-user interference (IUI). In contrast to SDMA, there is no IUI in orthogonal multiple access (OMA), but it requires orthogonal time or frequency resources for each user. Rate-splitting multiple access (RSMA), unifying SDMA, OMA, and non-orthogonal multiple access (NOMA), has recently been proven to be a flexible approach for robust interference management considering imperfect CSIT. In this paper, we investigate RSMA as a promising strategy to manage IUI in LEO satellite downlink systems caused by non-orthogonal user channels as well as imperfect CSIT. We evaluate the optimal configuration of RSMA depending on the geometrical constellation between the satellite and users.