 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Recursive deep learning framework for forecasting the decadal world economic outlook
Jan 25, 2023
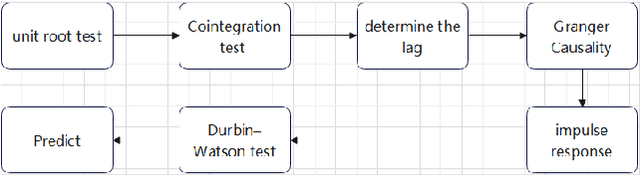
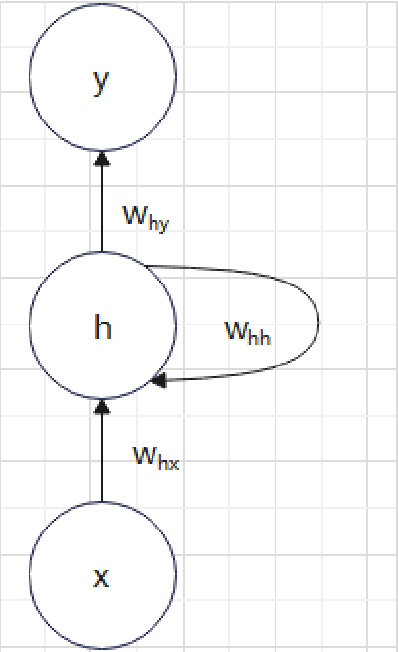
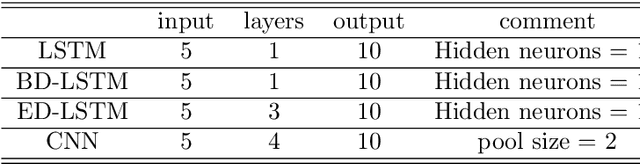
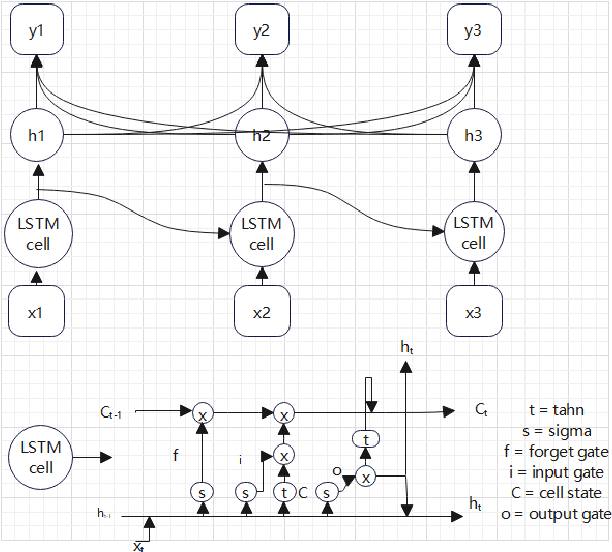
Gross domestic product (GDP) is the most widely used indicator in macroeconomics and the main tool for measuring a country's economic ouput. Due to the diversity and complexity of the world economy, a wide range of models have been used, but there are challenges in making decadal GDP forecasts given unexpected changes such as pandemics and wars. Deep learning models are well suited for modeling temporal sequences have been applied for time series forecasting. In this paper, we develop a deep learning framework to forecast the GDP growth rate of the world economy over a decade. We use Penn World Table as the source of our data, taking data from 1980 to 2019, across 13 countries, such as Australia, China, India, the United States and so on. We test multiple deep learning models, LSTM, BD-LSTM, ED-LSTM and CNN, and compared their results with the traditional time series model (ARIMA,VAR). Our results indicate that ED-LSTM is the best performing model. We present a recursive deep learning framework to predict the GDP growth rate in the next ten years. We predict that most countries will experience economic growth slowdown, stagnation or even recession within five years; only China, France and India are predicted to experience stable, or increasing, GDP growth.
Deep Spectral Q-learning with Application to Mobile Health
Jan 03, 2023
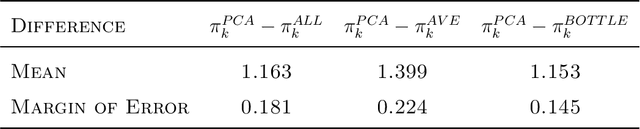
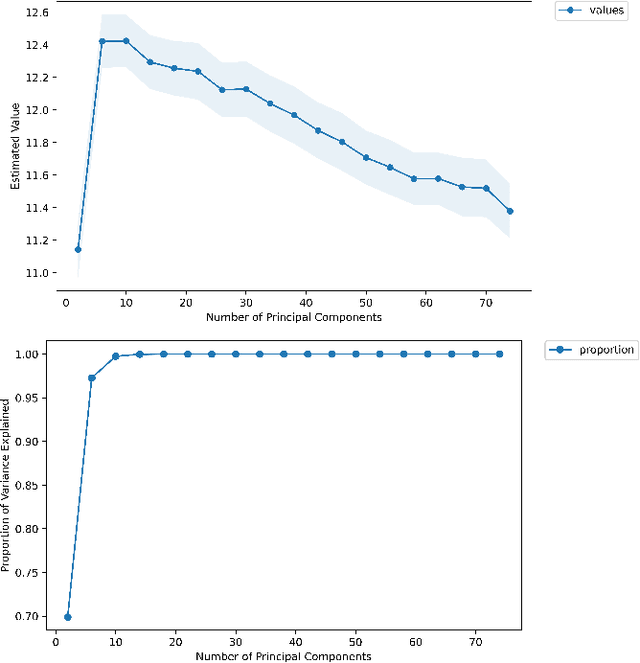
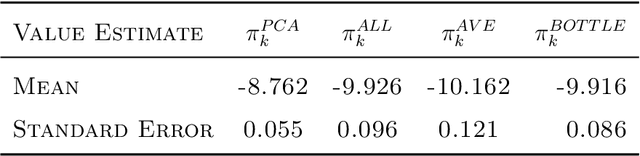
Dynamic treatment regimes assign personalized treatments to patients sequentially over time based on their baseline information and time-varying covariates. In mobile health applications, these covariates are typically collected at different frequencies over a long time horizon. In this paper, we propose a deep spectral Q-learning algorithm, which integrates principal component analysis (PCA) with deep Q-learning to handle the mixed frequency data. In theory, we prove that the mean return under the estimated optimal policy converges to that under the optimal one and establish its rate of convergence. The usefulness of our proposal is further illustrated via simulations and an application to a diabetes dataset.
In situ Biological Particle Analyzer based on Digital Inline Holography
Jan 14, 2023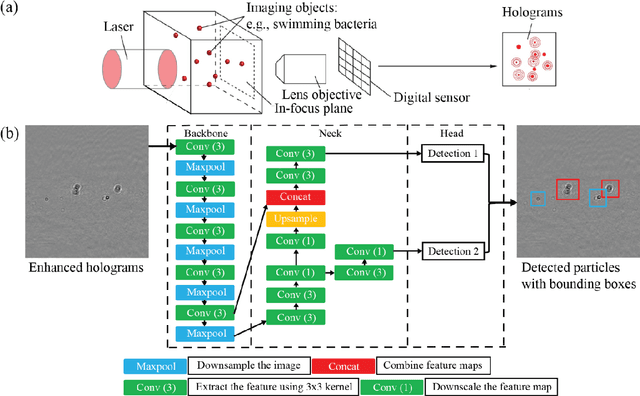
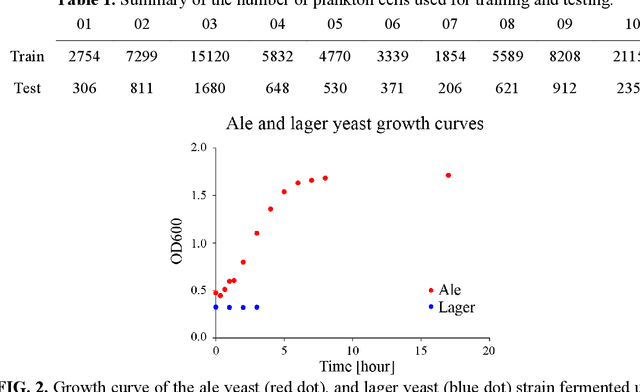
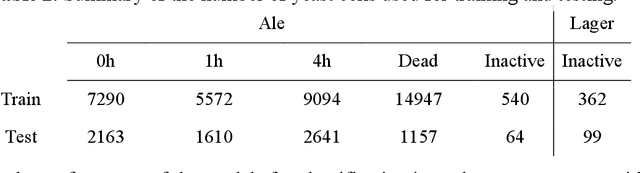
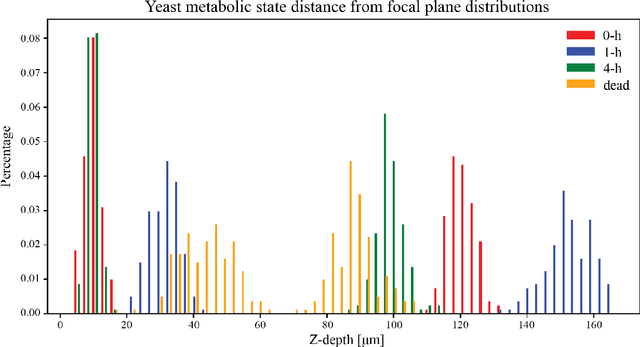
Obtaining in situ measurements of biological microparticles is crucial for both scientific research and numerous industrial applications (e.g., early detection of harmful algal blooms, monitoring yeast during fermentation). However, existing methods are limited to offer timely diagnostics of these particles with sufficient accuracy and information. Here, we introduce a novel method for real-time, in situ analysis using machine learning assisted digital inline holography (DIH). Our machine learning model uses a customized YOLO v5 architecture specialized for the detection and classification of small biological particles. We demonstrate the effectiveness of our method in the analysis of 10 plankton species with equivalent high accuracy and significantly reduced processing time compared to previous methods. We also applied our method to differentiate yeast cells under four metabolic states and from two strains. Our results show that the proposed method can accurately detect and differentiate cellular and subcellular features related to metabolic states and strains. This study demonstrates the potential of machine learning driven DIH approach as a sensitive and versatile diagnostic tool for real-time, in situ analysis of both biotic and abiotic particles. This method can be readily deployed in a distributive manner for scientific research and manufacturing on an industrial scale.
Genetic multi-armed bandits: a reinforcement learning approach for discrete optimization via simulation
Feb 15, 2023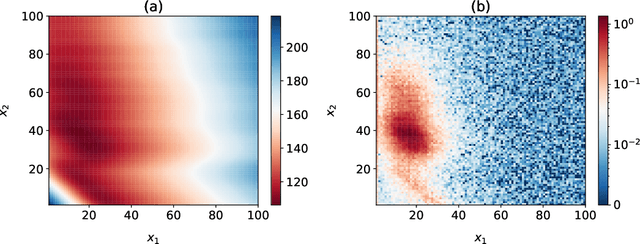
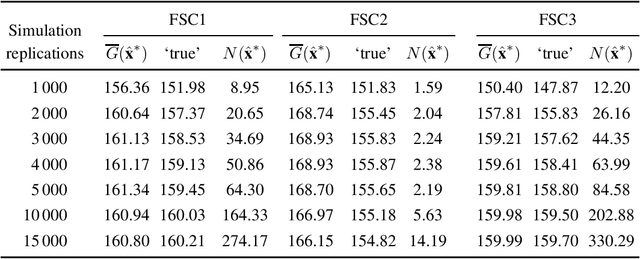
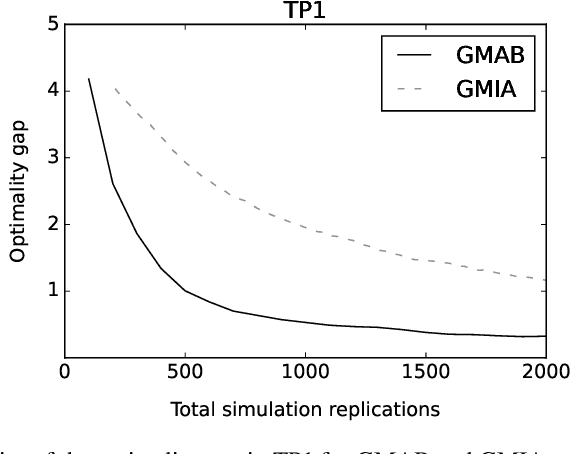
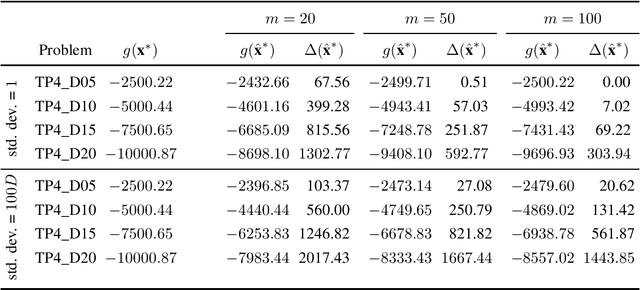
This paper proposes a new algorithm, referred to as GMAB, that combines concepts from the reinforcement learning domain of multi-armed bandits and random search strategies from the domain of genetic algorithms to solve discrete stochastic optimization problems via simulation. In particular, the focus is on noisy large-scale problems, which often involve a multitude of dimensions as well as multiple local optima. Our aim is to combine the property of multi-armed bandits to cope with volatile simulation observations with the ability of genetic algorithms to handle high-dimensional solution spaces accompanied by an enormous number of feasible solutions. For this purpose, a multi-armed bandit framework serves as a foundation, where each observed simulation is incorporated into the memory of GMAB. Based on this memory, genetic operators guide the search, as they provide powerful tools for exploration as well as exploitation. The empirical results demonstrate that GMAB achieves superior performance compared to benchmark algorithms from the literature in a large variety of test problems. In all experiments, GMAB required considerably fewer simulations to achieve similar or (far) better solutions than those generated by existing methods. At the same time, GMAB's overhead with regard to the required runtime is extremely small due to the suggested tree-based implementation of its memory. Furthermore, we prove its convergence to the set of global optima as the simulation effort goes to infinity.
Real-Time Gesture Recognition with Virtual Glove Markers
Jul 06, 2022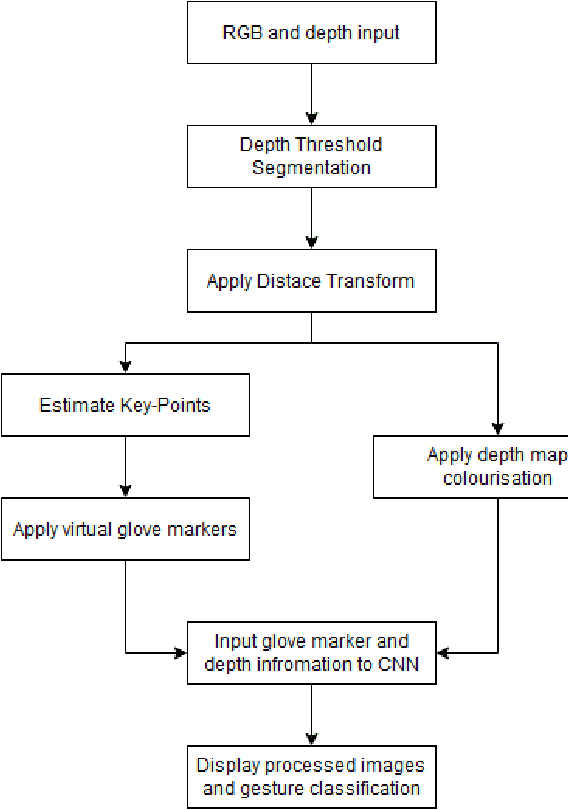

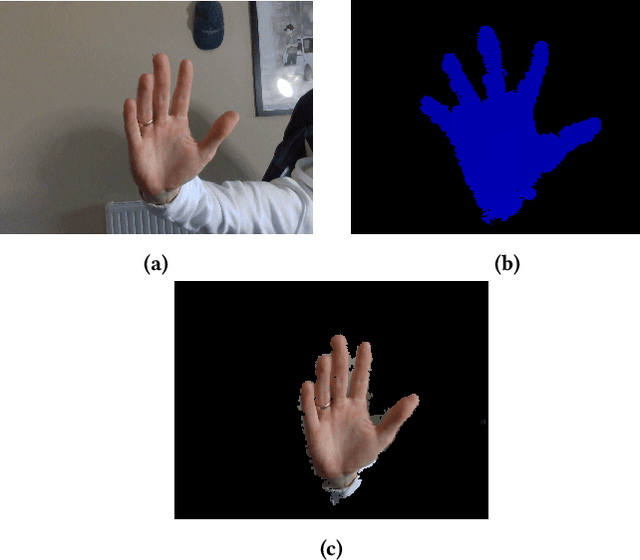

Due to the universal non-verbal natural communication approach that allows for effective communication between humans, gesture recognition technology has been steadily developing over the previous few decades. Many different strategies have been presented in research articles based on gesture recognition to try to create an effective system to send non-verbal natural communication information to computers, using both physical sensors and computer vision. Hyper accurate real-time systems, on the other hand, have only recently began to occupy the study field, with each adopting a range of methodologies due to past limits such as usability, cost, speed, and accuracy. A real-time computer vision-based human-computer interaction tool for gesture recognition applications that acts as a natural user interface is proposed. Virtual glove markers on users hands will be created and used as input to a deep learning model for the real-time recognition of gestures. The results obtained show that the proposed system would be effective in real-time applications including social interaction through telepresence and rehabilitation.
Graph Neural Networks for temporal graphs: State of the art, open challenges, and opportunities
Feb 03, 2023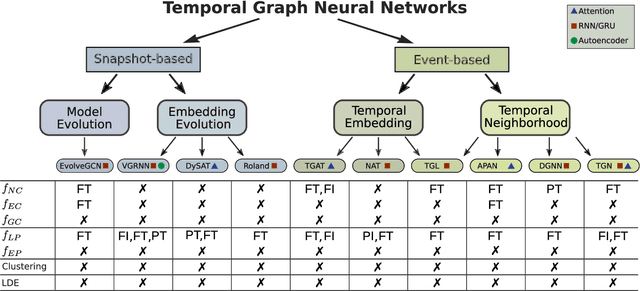
Graph Neural Networks (GNNs) have become the leading paradigm for learning on (static) graph-structured data. However, many real-world systems are dynamic in nature, since the graph and node/edge attributes change over time. In recent years, GNN-based models for temporal graphs have emerged as a promising area of research to extend the capabilities of GNNs. In this work, we provide the first comprehensive overview of the current state-of-the-art of temporal GNN, introducing a rigorous formalization of learning settings and tasks and a novel taxonomy categorizing existing approaches in terms of how the temporal aspect is represented and processed. We conclude the survey with a discussion of the most relevant open challenges for the field, from both research and application perspectives.
Efficient Training Under Limited Resources
Jan 23, 2023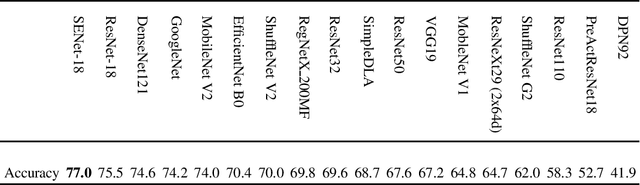
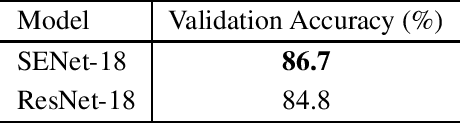

Training time budget and size of the dataset are among the factors affecting the performance of a Deep Neural Network (DNN). This paper shows that Neural Architecture Search (NAS), Hyper Parameters Optimization (HPO), and Data Augmentation help DNNs perform much better while these two factors are limited. However, searching for an optimal architecture and the best hyperparameter values besides a good combination of data augmentation techniques under low resources requires many experiments. We present our approach to achieving such a goal in three steps: reducing training epoch time by compressing the model while maintaining the performance compared to the original model, preventing model overfitting when the dataset is small, and performing the hyperparameter tuning. We used NOMAD, which is a blackbox optimization software based on a derivative-free algorithm to do NAS and HPO. Our work achieved an accuracy of 86.0 % on a tiny subset of Mini-ImageNet at the ICLR 2021 Hardware Aware Efficient Training (HAET) Challenge and won second place in the competition. The competition results can be found at haet2021.github.io/challenge and our source code can be found at github.com/DouniaLakhmiri/ICLR\_HAET2021.
AutoDOViz: Human-Centered Automation for Decision Optimization
Feb 19, 2023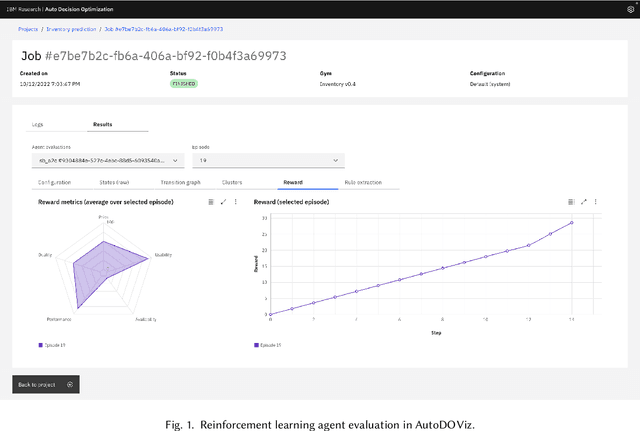
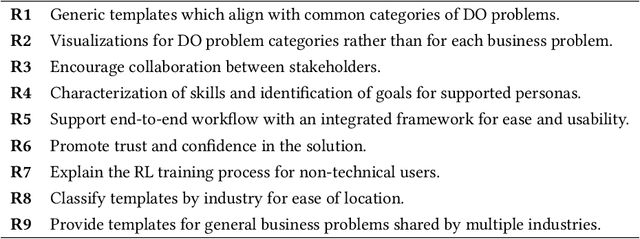
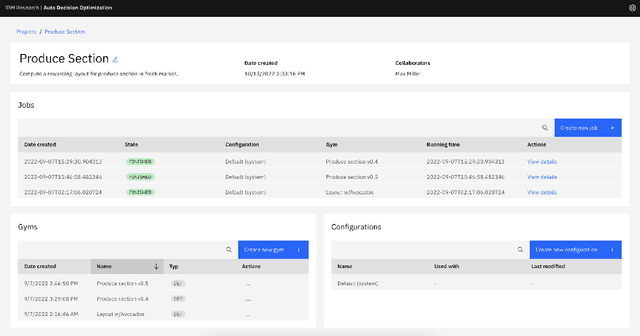
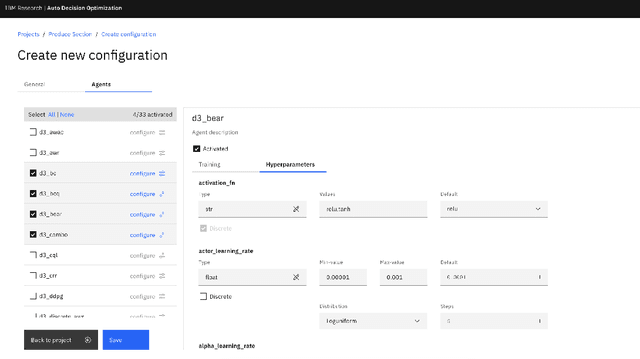
We present AutoDOViz, an interactive user interface for automated decision optimization (AutoDO) using reinforcement learning (RL). Decision optimization (DO) has classically being practiced by dedicated DO researchers where experts need to spend long periods of time fine tuning a solution through trial-and-error. AutoML pipeline search has sought to make it easier for a data scientist to find the best machine learning pipeline by leveraging automation to search and tune the solution. More recently, these advances have been applied to the domain of AutoDO, with a similar goal to find the best reinforcement learning pipeline through algorithm selection and parameter tuning. However, Decision Optimization requires significantly more complex problem specification when compared to an ML problem. AutoDOViz seeks to lower the barrier of entry for data scientists in problem specification for reinforcement learning problems, leverage the benefits of AutoDO algorithms for RL pipeline search and finally, create visualizations and policy insights in order to facilitate the typical interactive nature when communicating problem formulation and solution proposals between DO experts and domain experts. In this paper, we report our findings from semi-structured expert interviews with DO practitioners as well as business consultants, leading to design requirements for human-centered automation for DO with RL. We evaluate a system implementation with data scientists and find that they are significantly more open to engage in DO after using our proposed solution. AutoDOViz further increases trust in RL agent models and makes the automated training and evaluation process more comprehensible. As shown for other automation in ML tasks, we also conclude automation of RL for DO can benefit from user and vice-versa when the interface promotes human-in-the-loop.
An Efficient and Robust Method for Chest X-Ray Rib Suppression that Improves Pulmonary Abnormality Diagnosis
Feb 19, 2023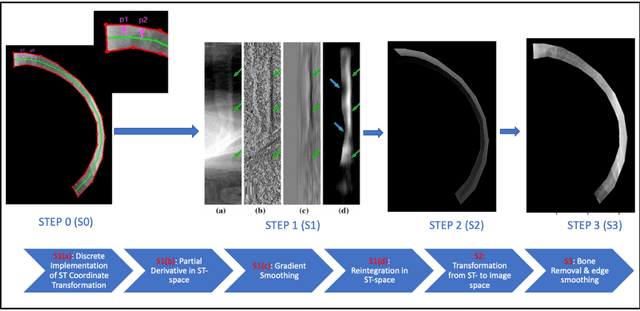
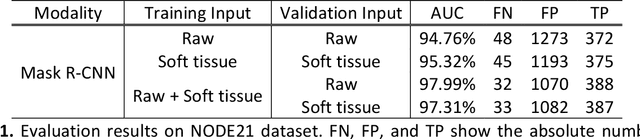
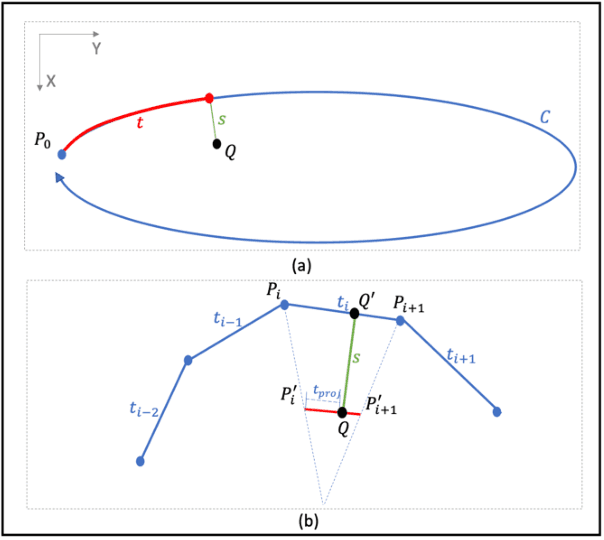
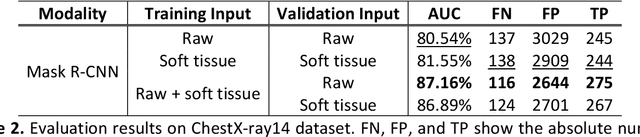
Suppression of thoracic bone shadows on chest X-rays (CXRs) has been indicated to improve the diagnosis of pulmonary disease. Previous approaches can be categorized as unsupervised physical and supervised deep learning models. Nevertheless, with physical models able to preserve morphological details but at the cost of extremely long processing time, existing DL methods face challenges of gathering sufficient/qualitative ground truth (GT) for robust training, thus leading to failure in maintaining clinically acceptable false positive rates. We hereby propose a generalizable yet efficient workflow of two stages: (1) training pairs generation with GT bone shadows eliminated in by a physical model in spatially transformed gradient fields. (2) fully supervised image denoising network training on stage-one datasets for fast rib removal on incoming CXRs. For step two, we designed a densely connected network called SADXNet, combined with peak signal to noise ratio and multi-scale structure similarity index measure objective minimization to suppress bony structures. The SADXNet organizes spatial filters in U shape (e.g., X=7; filters = 16, 64, 256, 512, 256, 64, 16) and preserves the feature map dimension throughout the network flow. Visually, SADXNet can suppress the rib edge and that near the lung wall/vertebra without jeopardizing the vessel/abnormality conspicuity. Quantitively, it achieves RMSE of ~0 during testing with one prediction taking <1s. Downstream tasks including lung nodule detection as well as common lung disease classification and localization are used to evaluate our proposed rib suppression mechanism. We observed 3.23% and 6.62% area under the curve (AUC) increase as well as 203 and 385 absolute false positive decrease for lung nodule detection and common lung disease localization, separately.
BALANCE: Bayesian Linear Attribution for Root Cause Localization
Jan 31, 2023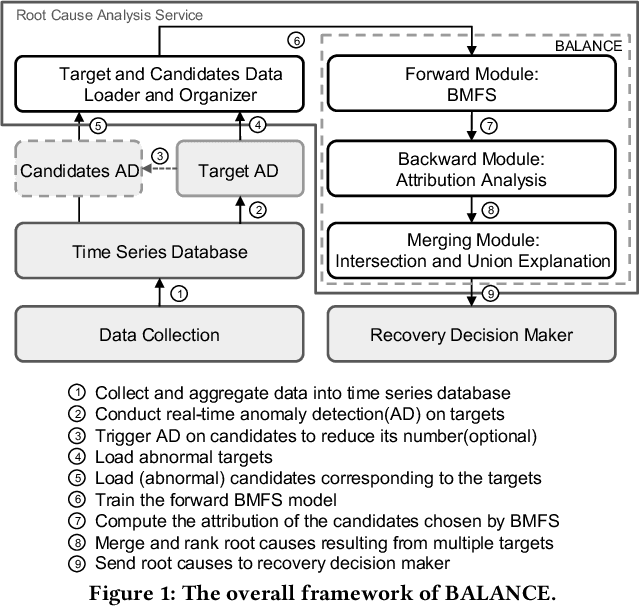
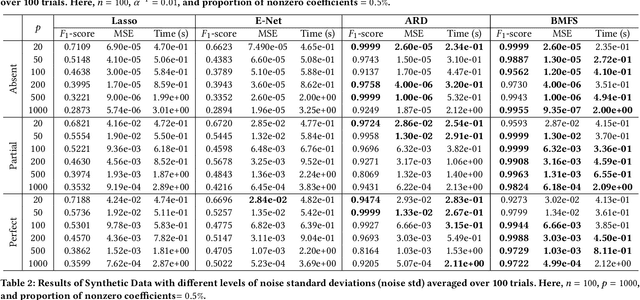
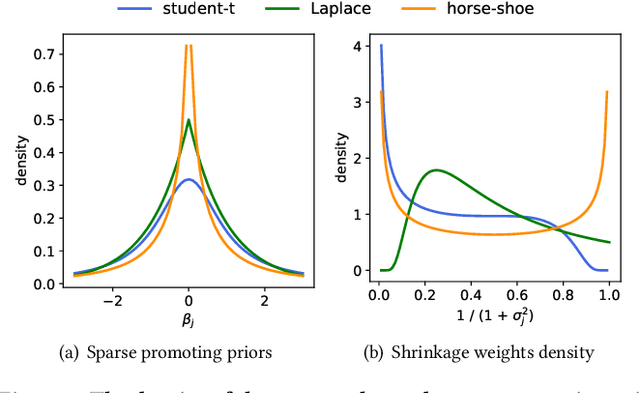

Root Cause Analysis (RCA) plays an indispensable role in distributed data system maintenance and operations, as it bridges the gap between fault detection and system recovery. Existing works mainly study multidimensional localization or graph-based root cause localization. This paper opens up the possibilities of exploiting the recently developed framework of explainable AI (XAI) for the purpose of RCA. In particular, we propose BALANCE (BAyesian Linear AttributioN for root CausE localization), which formulates the problem of RCA through the lens of attribution in XAI and seeks to explain the anomalies in the target KPIs by the behavior of the candidate root causes. BALANCE consists of three innovative components. First, we propose a Bayesian multicollinear feature selection (BMFS) model to predict the target KPIs given the candidate root causes in a forward manner while promoting sparsity and concurrently paying attention to the correlation between the candidate root causes. Second, we introduce attribution analysis to compute the attribution score for each candidate in a backward manner. Third, we merge the estimated root causes related to each KPI if there are multiple KPIs. We extensively evaluate the proposed BALANCE method on one synthesis dataset as well as three real-world RCA tasks, that is, bad SQL localization, container fault localization, and fault type diagnosis for Exathlon. Results show that BALANCE outperforms the state-of-the-art (SOTA) methods in terms of accuracy with the least amount of running time, and achieves at least $6\%$ notably higher accuracy than SOTA methods for real tasks. BALANCE has been deployed to production to tackle real-world RCA problems, and the online results further advocate its usage for real-time diagnosis in distributed data systems.