 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Integration of 5G and Motion Sensors for Vehicular Positioning: A Loosely-Coupled Approach
Mar 16, 2024
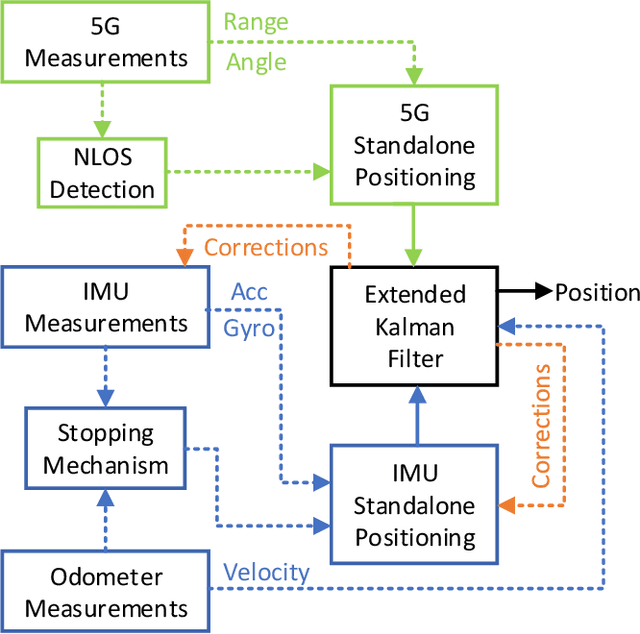
Autonomous vehicles (AVs) are poised to revolutionize the transportation industry by enhancing traffic efficiency and road safety. However, achieving optimal vehicular autonomy demands an uninterrupted and precise positioning solution, especially in deep urban environments. 5G mmWave holds immense potential to provide such a service due to its accurate range and angle measurements. Yet, as mmWave signals are prone to signal blockage, severe positioning errors will occur. Most of the 5G positioning literature relies on constant motion models to bridge such 5G outages, which do not capture the true dynamics of the vehicle. Few proposed methodologies rely on inertial measurement units (IMUs) to bridge such gaps, where they predominantly use tightly coupled (TC) integration schemes, introducing a nonlinear 5G measurement model. Such approaches, which rely on Kalman filtering, necessitate the linearization of the measurement model, leading to pronounced positioning errors. In this paper, however, we propose a loosely coupled (LC) sensor fusion scheme to integrate 5G, IMUs, and odometers to mitigate linearization errors. Additionally, we propose a novel method to design the process covariance matrix of the extended Kalman filter (EKF). Moreover, we propose enhancements to the mechanization of the IMU data to enhance the standalone IMU solution. The proposed methodologies were tested using a novel setup comprising 5G measurements from Siradel's S_5G simulation tool and real IMU and odometer measurements from an hour-long trajectory. The proposed method resulted in 14 cm of error for 95% of the time compared to 1 m provided by the traditional constant velocity model approach.
Scheduling Drone and Mobile Charger via Hybrid-Action Deep Reinforcement Learning
Mar 16, 2024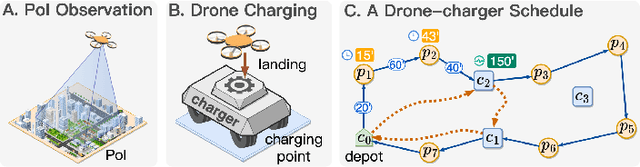
Recently there has been a growing interest in industry and academia, regarding the use of wireless chargers to prolong the operational longevity of unmanned aerial vehicles (commonly knowns as drones). In this paper we consider a charger-assisted drone application: a drone is deployed to observe a set points of interest, while a charger can move to recharge the drone's battery. We focus on the route and charging schedule of the drone and the mobile charger, to obtain high observation utility with the shortest possible time, while ensuring the drone remains operational during task execution. Essentially, this proposed drone-charger scheduling problem is a multi-stage decision-making process, in which the drone and the mobile charger act as two agents who cooperate to finish a task. The discrete-continuous hybrid action space of the two agents poses a significant challenge in our problem. To address this issue, we present a hybrid-action deep reinforcement learning framework, called HaDMC, which uses a standard policy learning algorithm to generate latent continuous actions. Motivated by representation learning, we specifically design and train an action decoder. It involves two pipelines to convert the latent continuous actions into original discrete and continuous actions, by which the drone and the charger can directly interact with environment. We embed a mutual learning scheme in model training, emphasizing the collaborative rather than individual actions. We conduct extensive numerical experiments to evaluate HaDMC and compare it with state-of-the-art deep reinforcement learning approaches. The experimental results show the effectiveness and efficiency of our solution.
Enhancing IoT Security Against DDoS Attacks through Federated Learning
Mar 16, 2024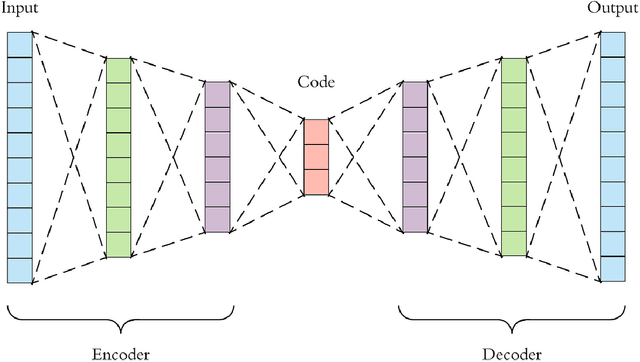
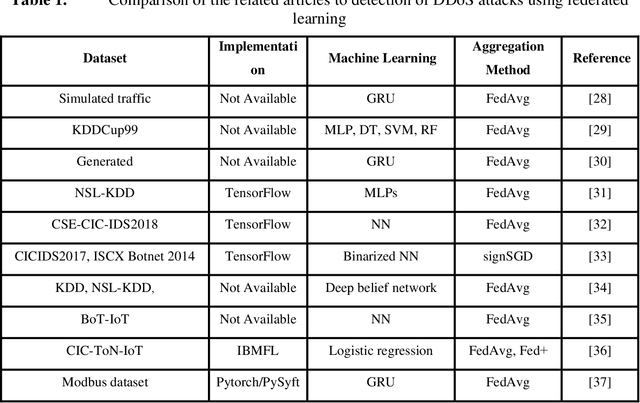
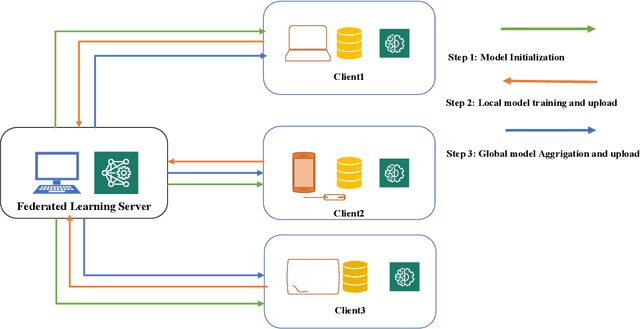
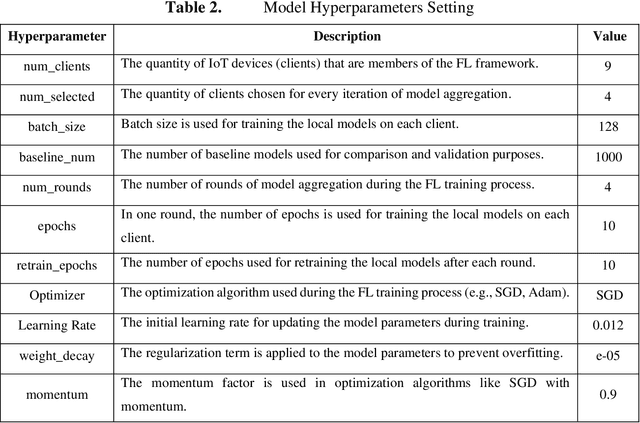
The rapid proliferation of the Internet of Things (IoT) has ushered in transformative connectivity between physical devices and the digital realm. Nonetheless, the escalating threat of Distributed Denial of Service (DDoS) attacks jeopardizes the integrity and reliability of IoT networks. Conventional DDoS mitigation approaches are ill-equipped to handle the intricacies of IoT ecosystems, potentially compromising data privacy. This paper introduces an innovative strategy to bolster the security of IoT networks against DDoS attacks by harnessing the power of Federated Learning that allows multiple IoT devices or edge nodes to collaboratively build a global model while preserving data privacy and minimizing communication overhead. The research aims to investigate Federated Learning's effectiveness in detecting and mitigating DDoS attacks in IoT. Our proposed framework leverages IoT devices' collective intelligence for real-time attack detection without compromising sensitive data. This study proposes innovative deep autoencoder approaches for data dimensionality reduction, retraining, and partial selection to enhance the performance and stability of the proposed model. Additionally, two renowned aggregation algorithms, FedAvg and FedAvgM, are employed in this research. Various metrics, including true positive rate, false positive rate, and F1-score, are employed to evaluate the model. The dataset utilized in this research, N-BaIoT, exhibits non-IID data distribution, where data categories are distributed quite differently. The negative impact of these distribution disparities is managed by employing retraining and partial selection techniques, enhancing the final model's stability. Furthermore, evaluation results demonstrate that the FedAvgM aggregation algorithm outperforms FedAvg, indicating that in non-IID datasets, FedAvgM provides better stability and performance.
Run-time Introspection of 2D Object Detection in Automated Driving Systems Using Learning Representations
Mar 02, 2024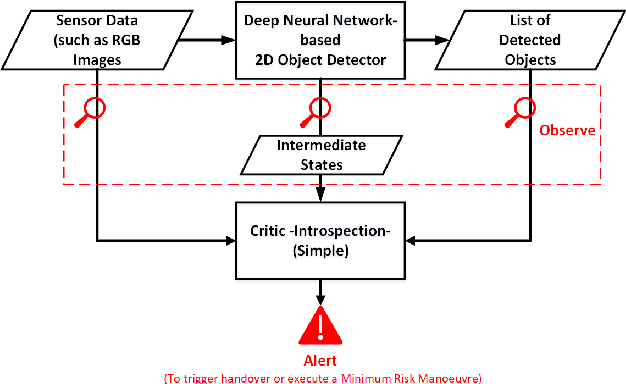
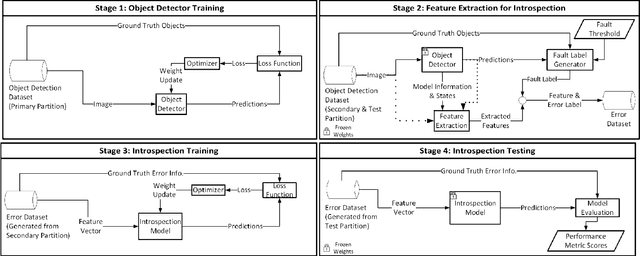
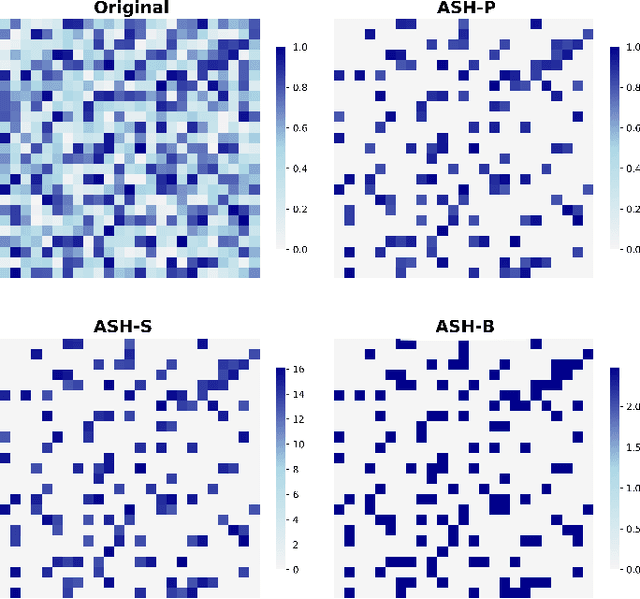
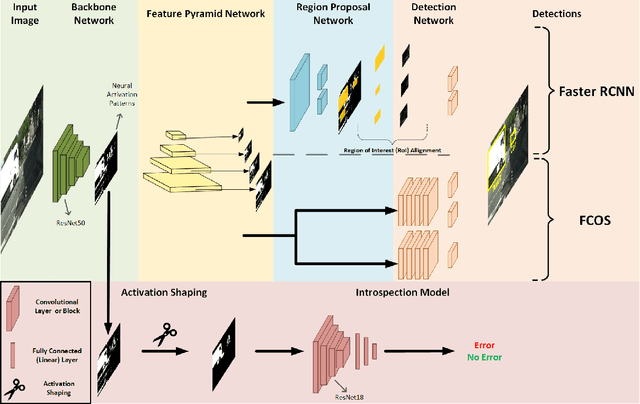
Reliable detection of various objects and road users in the surrounding environment is crucial for the safe operation of automated driving systems (ADS). Despite recent progresses in developing highly accurate object detectors based on Deep Neural Networks (DNNs), they still remain prone to detection errors, which can lead to fatal consequences in safety-critical applications such as ADS. An effective remedy to this problem is to equip the system with run-time monitoring, named as introspection in the context of autonomous systems. Motivated by this, we introduce a novel introspection solution, which operates at the frame level for DNN-based 2D object detection and leverages neural network activation patterns. The proposed approach pre-processes the neural activation patterns of the object detector's backbone using several different modes. To provide extensive comparative analysis and fair comparison, we also adapt and implement several state-of-the-art (SOTA) introspection mechanisms for error detection in 2D object detection, using one-stage and two-stage object detectors evaluated on KITTI and BDD datasets. We compare the performance of the proposed solution in terms of error detection, adaptability to dataset shift, and, computational and memory resource requirements. Our performance evaluation shows that the proposed introspection solution outperforms SOTA methods, achieving an absolute reduction in the missed error ratio of 9% to 17% in the BDD dataset.
Gaze-based Human-Robot Interaction System for Infrastructure Inspections
Mar 12, 2024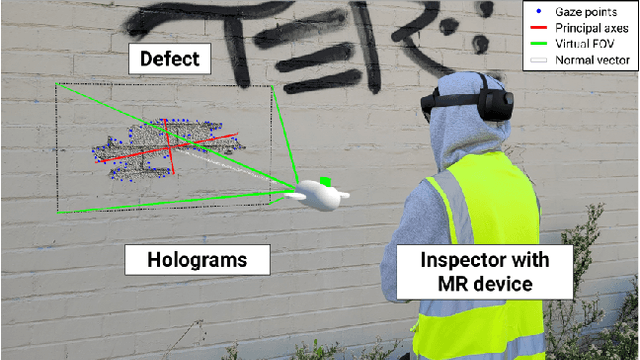
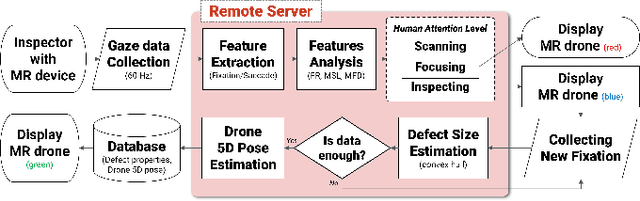
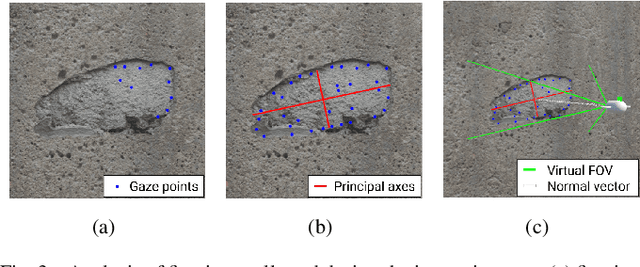
Routine inspections for critical infrastructures such as bridges are required in most jurisdictions worldwide. Such routine inspections are largely visual in nature, which are qualitative, subjective, and not repeatable. Although robotic infrastructure inspections address such limitations, they cannot replace the superior ability of experts to make decisions in complex situations, thus making human-robot interaction systems a promising technology. This study presents a novel gaze-based human-robot interaction system, designed to augment the visual inspection performance through mixed reality. Through holograms from a mixed reality device, gaze can be utilized effectively to estimate the properties of the defect in real-time. Additionally, inspectors can monitor the inspection progress online, which enhances the speed of the entire inspection process. Limited controlled experiments demonstrate its effectiveness across various users and defect types. To our knowledge, this is the first demonstration of the real-time application of eye gaze in civil infrastructure inspections.
Time Series Analysis in Compressor-Based Machines: A Survey
Feb 27, 2024In both industrial and residential contexts, compressor-based machines, such as refrigerators, HVAC systems, heat pumps and chillers, are essential to fulfil production and consumers' needs. The diffusion of sensors and IoT connectivity supports the development of monitoring systems able to detect and predict faults, identify behavioural shifts and forecast the operational status of machines and of their components. The focus of this paper is to survey the recent research on such tasks as Fault Detection, Fault Prediction, Forecasting and Change Point Detection applied to multivariate time series characterizing the operations of compressor-based machines. Specifically, Fault Detection detects and diagnoses faults, Fault Prediction predicts such occurrences, forecasting anticipates the future value of characteristic variables of machines and Change Point Detection identifies significant variations in the behaviour of the appliances, such as a change in the working regime. We identify and classify the approaches to the above-mentioned tasks, compare the algorithms employed, highlight the gaps in the current status of the art and discuss the most promising future research directions in the field.
Cost-Effective Methodology for Complex Tuning Searches in HPC: Navigating Interdependencies and Dimensionality
Mar 12, 2024
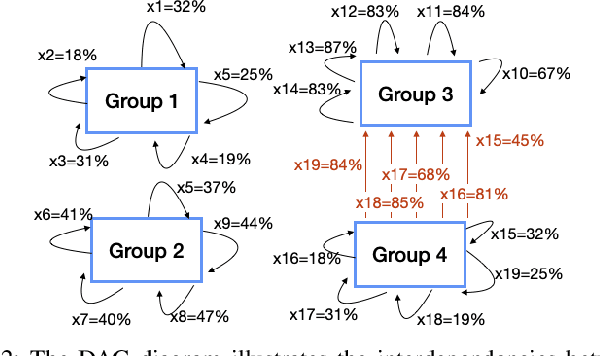
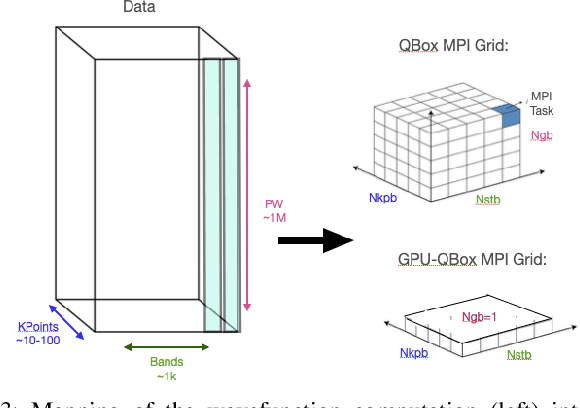
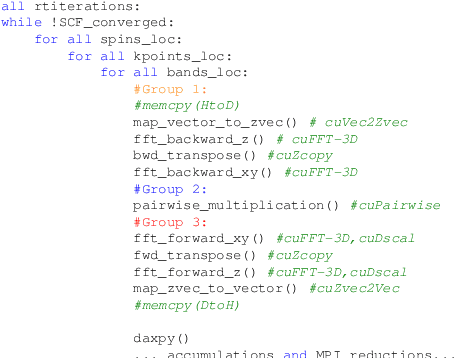
Tuning searches are pivotal in High-Performance Computing (HPC), addressing complex optimization challenges in computational applications. The complexity arises not only from finely tuning parameters within routines but also potential interdependencies among them, rendering traditional optimization methods inefficient. Instead of scrutinizing interdependencies among parameters and routines, practitioners often face the dilemma of conducting independent tuning searches for each routine, thereby overlooking interdependence, or pursuing a more resource-intensive joint search for all routines. This decision is driven by the consideration that some interdependence analysis and high-dimensional decomposition techniques in literature may be prohibitively expensive in HPC tuning searches. Our methodology adapts and refines these methods to ensure computational feasibility while maximizing performance gains in real-world scenarios. Our methodology leverages a cost-effective interdependence analysis to decide whether to merge several tuning searches into a joint search or conduct orthogonal searches. Tested on synthetic functions with varying levels of parameter interdependence, our methodology efficiently explores the search space. In comparison to Bayesian-optimization-based full independent or fully joint searches, our methodology suggested an optimized breakdown of independent and merged searches that led to final configurations up to 8% more accurate, reducing the search time by up to 95%. When applied to GPU-offloaded Real-Time Time-Dependent Density Functional Theory (RT-TDDFT), an application in computational materials science that challenges modern HPC autotuners, our methodology achieved an effective tuning search. Its adaptability and efficiency extend beyond RT-TDDFT, making it valuable for related applications in HPC.
MetaSplit: Meta-Split Network for Limited-Stock Product Recommendation
Mar 16, 2024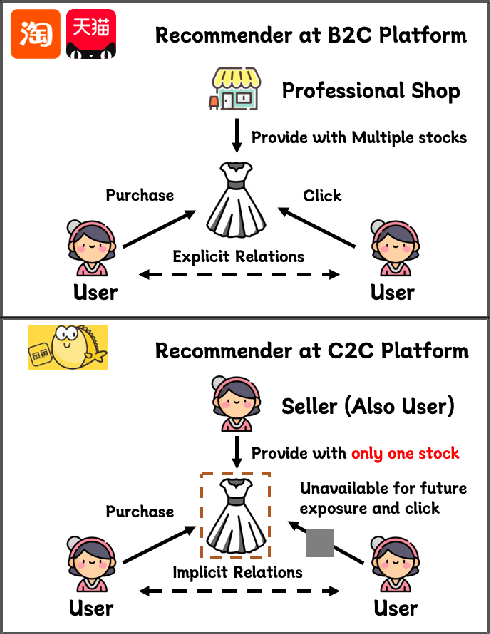
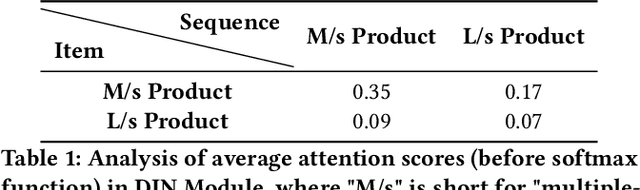
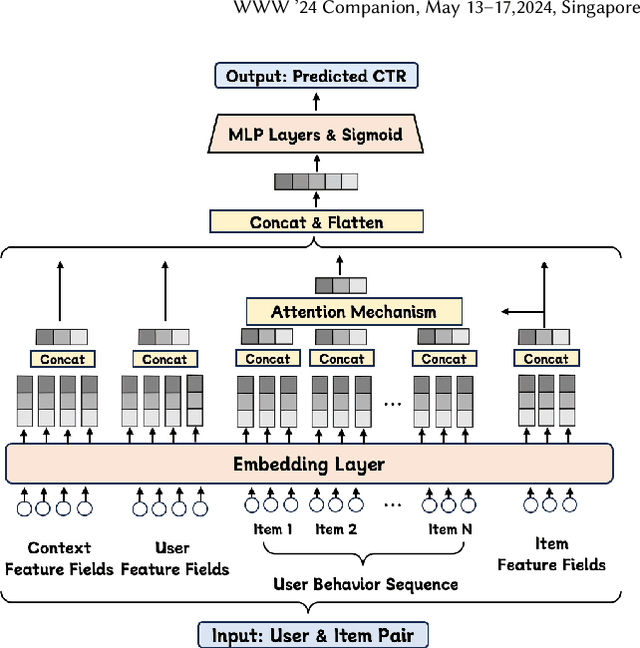
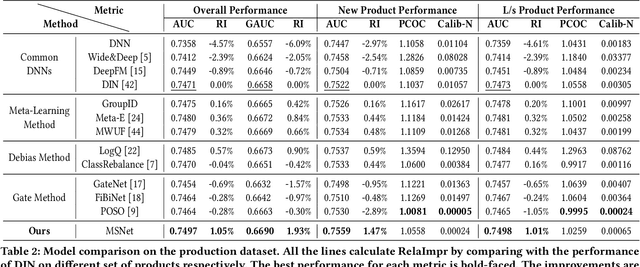
Compared to business-to-consumer (B2C) e-commerce systems, consumer-to-consumer (C2C) e-commerce platforms usually encounter the limited-stock problem, that is, a product can only be sold one time in a C2C system. This poses several unique challenges for click-through rate (CTR) prediction. Due to limited user interactions for each product (i.e. item), the corresponding item embedding in the CTR model may not easily converge. This makes the conventional sequence modeling based approaches cannot effectively utilize user history information since historical user behaviors contain a mixture of items with different volume of stocks. Particularly, the attention mechanism in a sequence model tends to assign higher score to products with more accumulated user interactions, making limited-stock products being ignored and contribute less to the final output. To this end, we propose the Meta-Split Network (MSNet) to split user history sequence regarding to the volume of stock for each product, and adopt differentiated modeling approaches for different sequences. As for the limited-stock products, a meta-learning approach is applied to address the problem of inconvergence, which is achieved by designing meta scaling and shifting networks with ID and side information. In addition, traditional approach can hardly update item embedding once the product is consumed. Thereby, we propose an auxiliary loss that makes the parameters updatable even when the product is no longer in distribution. To the best of our knowledge, this is the first solution addressing the recommendation of limited-stock product. Experimental results on the production dataset and online A/B testing demonstrate the effectiveness of our proposed method.
Inverse Submodular Maximization with Application to Human-in-the-Loop Multi-Robot Multi-Objective Coverage Control
Mar 16, 2024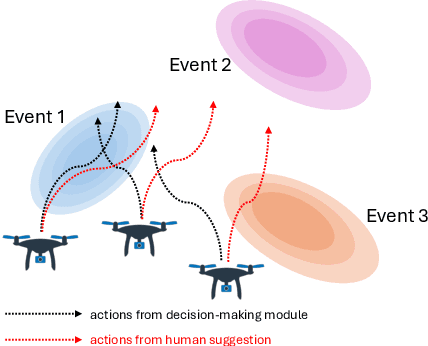
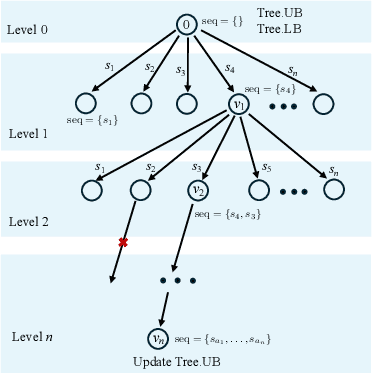
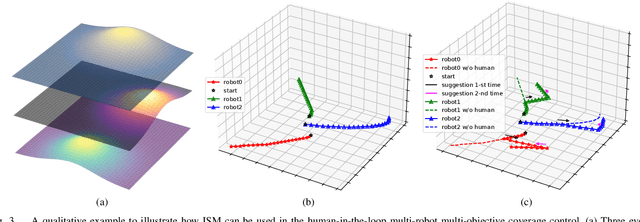
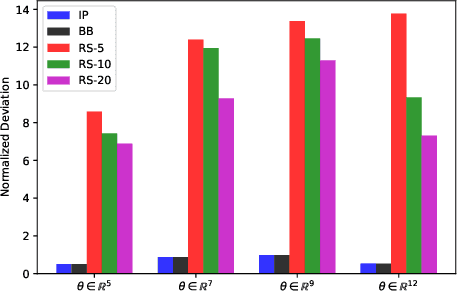
We consider a new type of inverse combinatorial optimization, Inverse Submodular Maximization (ISM), for human-in-the-loop multi-robot coordination. Forward combinatorial optimization, defined as the process of solving a combinatorial problem given the reward (cost)-related parameters, is widely used in multi-robot coordination. In the standard pipeline, the reward (cost)-related parameters are designed offline by domain experts first and then these parameters are utilized for coordinating robots online. What if we need to change these parameters by non-expert human supervisors who watch over the robots during tasks to adapt to some new requirements? We are interested in the case where human supervisors can suggest what actions to take, and the robots need to change the internal parameters based on such suggestions. We study such problems from the perspective of inverse combinatorial optimization, i.e., the process of finding parameters given solutions to the problem. Specifically, we propose a new formulation for ISM, in which we aim to find a new set of parameters that minimally deviate from the current parameters and can make the greedy algorithm output actions the same as those suggested by humans. We show that such problems can be formulated as a Mixed Integer Quadratic Program (MIQP). However, MIQP involves exponentially many binary variables, making it intractable for the existing solver when the problem size is large. We propose a new algorithm under the Branch $\&$ Bound paradigm to solve such problems. In numerical simulations, we demonstrate how to use ISM in multi-robot multi-objective coverage control, and we show that the proposed algorithm achieves significant advantages in running time and peak memory usage compared to directly using an existing solver.
COVID-CT-H-UNet: a novel COVID-19 CT segmentation network based on attention mechanism and Bi-category Hybrid loss
Mar 16, 2024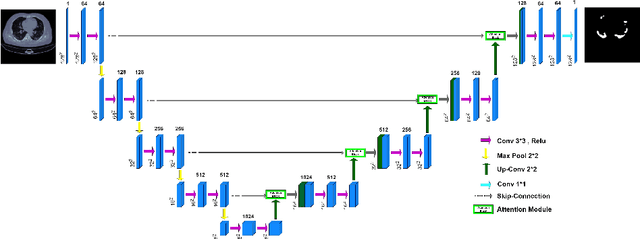
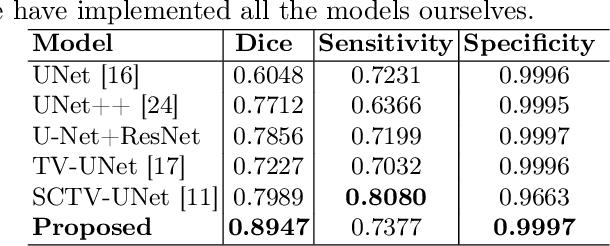
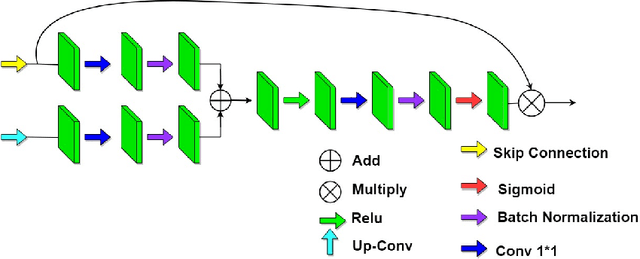
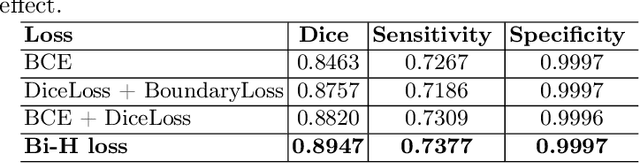
Since 2019, the global COVID-19 outbreak has emerged as a crucial focus in healthcare research. Although RT-PCR stands as the primary method for COVID-19 detection, its extended detection time poses a significant challenge. Consequently, supplementing RT-PCR with the pathological study of COVID-19 through CT imaging has become imperative. The current segmentation approach based on TVLoss enhances the connectivity of afflicted areas. Nevertheless, it tends to misclassify normal pixels between certain adjacent diseased regions as diseased pixels. The typical Binary cross entropy(BCE) based U-shaped network only concentrates on the entire CT images without emphasizing on the affected regions, which results in hazy borders and low contrast in the projected output. In addition, the fraction of infected pixels in CT images is much less, which makes it a challenge for segmentation models to make accurate predictions. In this paper, we propose COVID-CT-H-UNet, a COVID-19 CT segmentation network to solve these problems. To recognize the unaffected pixels between neighbouring diseased regions, extra visual layer information is captured by combining the attention module on the skip connections with the proposed composite function Bi-category Hybrid Loss. The issue of hazy boundaries and poor contrast brought on by the BCE Loss in conventional techniques is resolved by utilizing the composite function Bi-category Hybrid Loss that concentrates on the pixels in the diseased area. The experiment shows when compared to the previous COVID-19 segmentation networks, the proposed COVID-CT-H-UNet's segmentation impact has greatly improved, and it may be used to identify and study clinical COVID-19.