 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
ROG-Map: An Efficient Robocentric Occupancy Grid Map for Large-scene and High-resolution LiDAR-based Motion Planning
Feb 28, 2023
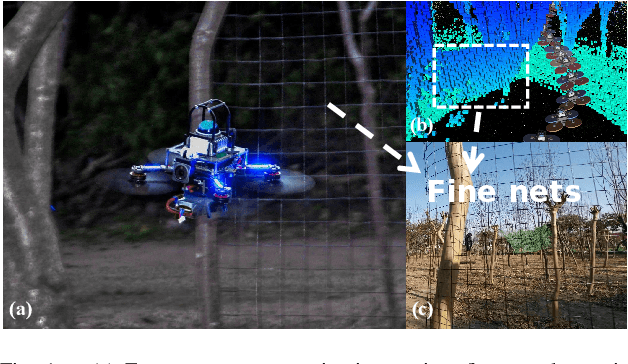
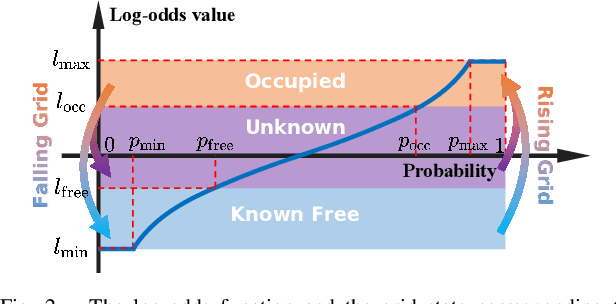
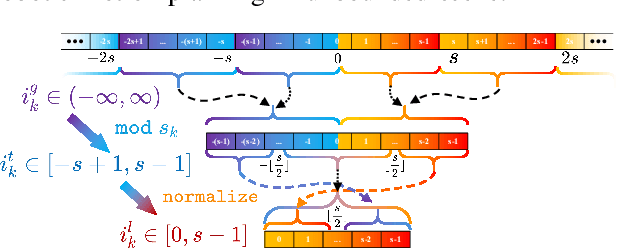
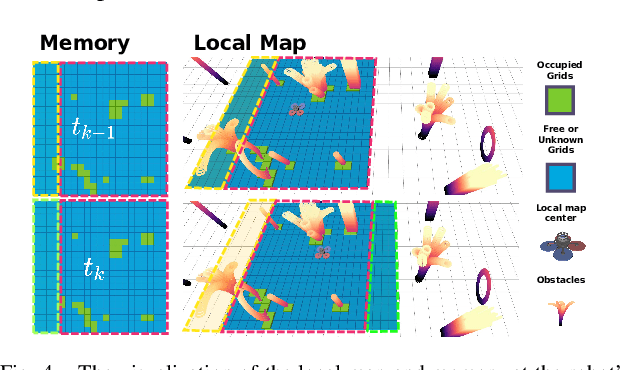
Recent advances in LiDAR technology have opened up new possibilities for robotic navigation. Given the widespread use of occupancy grid maps (OGMs) in robotic motion planning, this paper aims to address the challenges of integrating LiDAR with OGMs. To this end, we propose ROG-Map, a uniform grid-based OGM that maintains a local map moving along with the robot to enable efficient map operation and reduce memory costs for large-scene autonomous flight. Moreover, we present a novel incremental obstacle inflation method that significantly reduces the computational cost of inflation. The proposed method outperforms state-of-the-art (SOTA) methods on various public datasets. To demonstrate the effectiveness and efficiency of ROG-Map, we integrate it into a complete quadrotor system and perform autonomous flights against both small obstacles and large-scale scenes. During real-world flight tests with a 0.05 m resolution local map and 30mx30mx12m local map size, ROG-Map takes only 29.8% of frame time on average to update the map at a frame rate of 50 Hz (\ie, 5.96 ms in 20 ms), including 0.33% (i.e., 0.66 ms) to perform obstacle inflation, demonstrating outstanding real-world performance. We release ROG-Map as an open-source ROS package to promote the development of LiDAR-based motion planning.
A Closer Look at the Intervention Procedure of Concept Bottleneck Models
Feb 28, 2023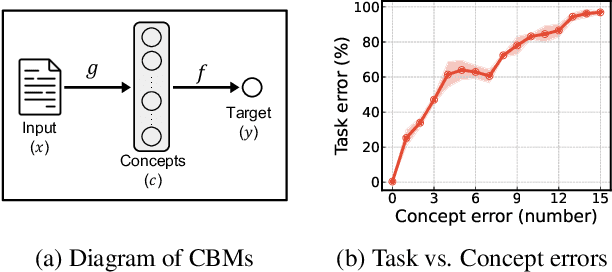
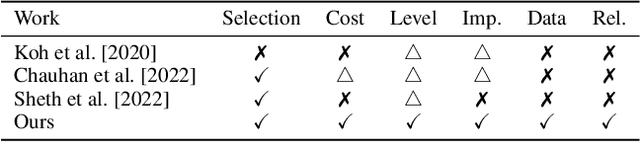
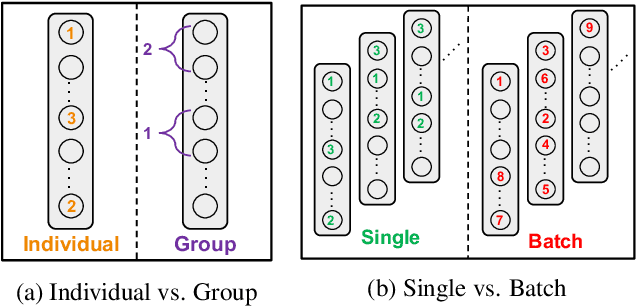
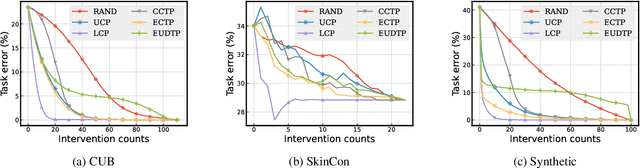
Concept bottleneck models (CBMs) are a class of interpretable neural network models that predict the target response of a given input based on its high-level concepts. Unlike the standard end-to-end models, CBMs enable domain experts to intervene on the predicted concepts and rectify any mistakes at test time, so that more accurate task predictions can be made at the end. While such intervenability provides a powerful avenue of control, many aspects of the intervention procedure remain rather unexplored. In this work, we develop various ways of selecting intervening concepts to improve the intervention effectiveness and conduct an array of in-depth analyses as to how they evolve under different circumstances. Specifically, we find that an informed intervention strategy can reduce the task error more than ten times compared to the current baseline under the same amount of intervention counts in realistic settings, and yet, this can vary quite significantly when taking into account different intervention granularity. We verify our findings through comprehensive evaluations, not only on the standard real datasets, but also on synthetic datasets that we generate based on a set of different causal graphs. We further discover some major pitfalls of the current practices which, without a proper addressing, raise concerns on reliability and fairness of the intervention procedure.
Design of an Adaptive Lightweight LiDAR to Decouple Robot-Camera Geometry
Feb 28, 2023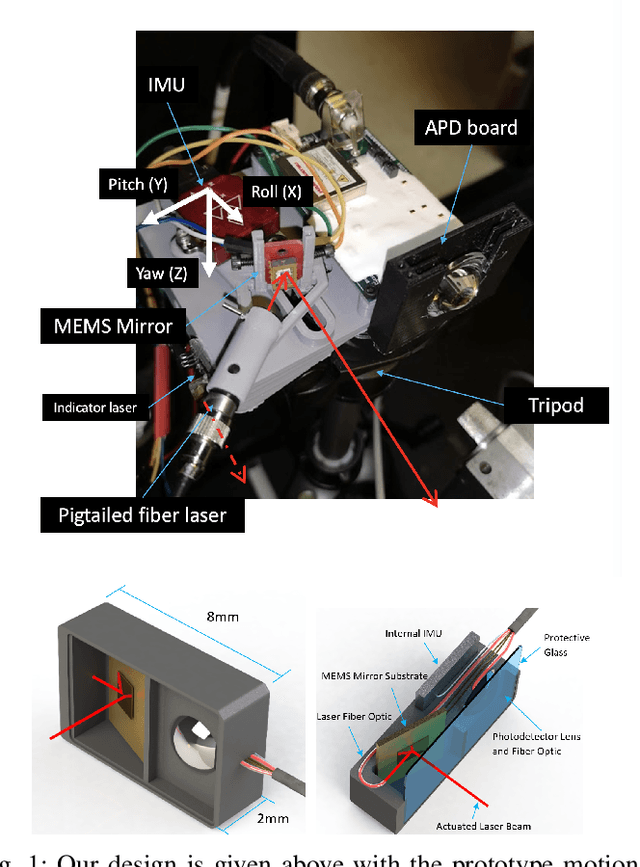
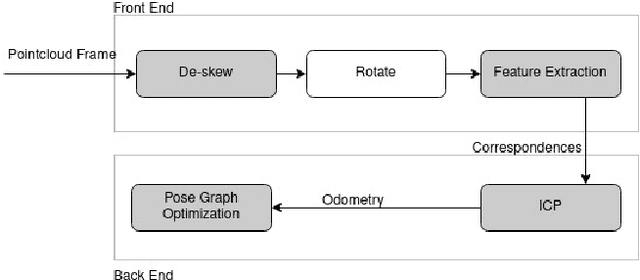
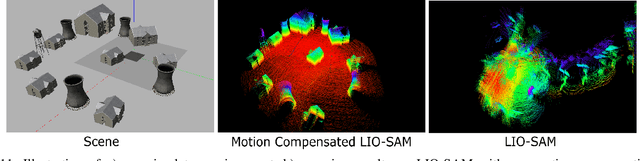
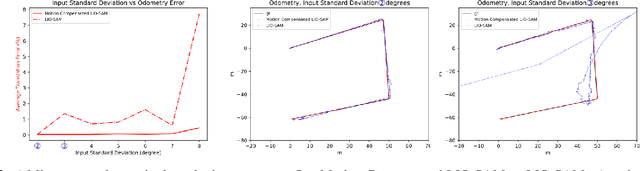
A fundamental challenge in robot perception is the coupling of the sensor pose and robot pose. This has led to research in active vision where robot pose is changed to reorient the sensor to areas of interest for perception. Further, egomotion such as jitter, and external effects such as wind and others affect perception requiring additional effort in software such as image stabilization. This effect is particularly pronounced in micro-air vehicles and micro-robots who typically are lighter and subject to larger jitter but do not have the computational capability to perform stabilization in real-time. We present a novel microelectromechanical (MEMS) mirror LiDAR system to change the field of view of the LiDAR independent of the robot motion. Our design has the potential for use on small, low-power systems where the expensive components of the LiDAR can be placed external to the small robot. We show the utility of our approach in simulation and on prototype hardware mounted on a UAV. We believe that this LiDAR and its compact movable scanning design provide mechanisms to decouple robot and sensor geometry allowing us to simplify robot perception. We also demonstrate examples of motion compensation using IMU and external odometry feedback in hardware.
Memory-aided Contrastive Consensus Learning for Co-salient Object Detection
Feb 28, 2023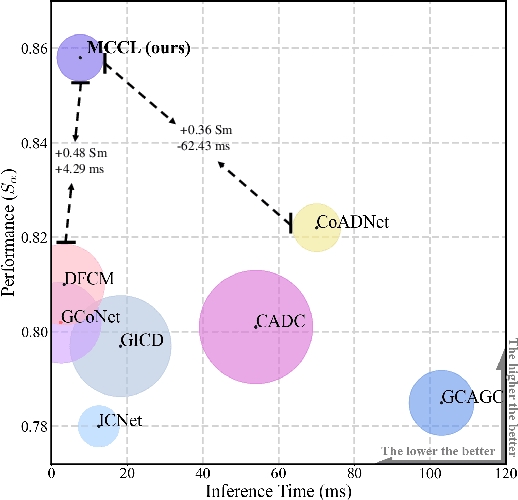
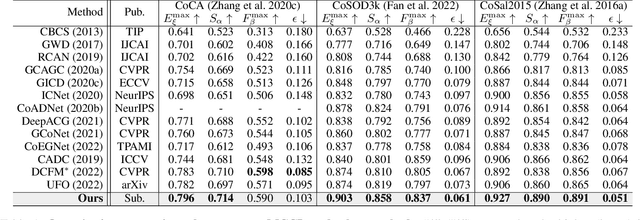
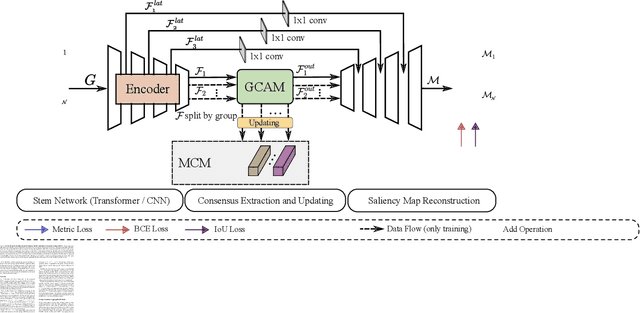

Co-Salient Object Detection (CoSOD) aims at detecting common salient objects within a group of relevant source images. Most of the latest works employ the attention mechanism for finding common objects. To achieve accurate CoSOD results with high-quality maps and high efficiency, we propose a novel Memory-aided Contrastive Consensus Learning (MCCL) framework, which is capable of effectively detecting co-salient objects in real time (~110 fps). To learn better group consensus, we propose the Group Consensus Aggregation Module (GCAM) to abstract the common features of each image group; meanwhile, to make the consensus representation more discriminative, we introduce the Memory-based Contrastive Module (MCM), which saves and updates the consensus of images from different groups in a queue of memories. Finally, to improve the quality and integrity of the predicted maps, we develop an Adversarial Integrity Learning (AIL) strategy to make the segmented regions more likely composed of complete objects with less surrounding noise. Extensive experiments on all the latest CoSOD benchmarks demonstrate that our lite MCCL outperforms 13 cutting-edge models, achieving the new state of the art (~5.9% and ~6.2% improvement in S-measure on CoSOD3k and CoSal2015, respectively). Our source codes, saliency maps, and online demos are publicly available at https://github.com/ZhengPeng7/MCCL.
Estimation of Correlation Matrices from Limited time series Data using Machine Learning
Sep 02, 2022

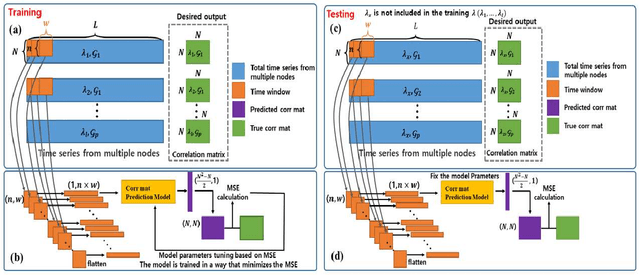
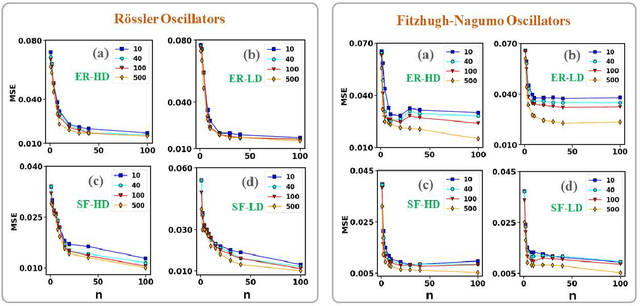
Prediction of correlation matrices from given time series data has several applications for a range of problems, such as inferring neuronal connections from spiking data, deducing causal dependencies between genes from expression data, and discovering long spatial range influences in climate variations. Traditional methods of predicting correlation matrices utilize time series data of all the nodes of the underlying networks. Here, we use a supervised machine learning technique to predict the correlation matrix of entire systems from finite time series information of a few randomly selected nodes. The accuracy of the prediction from the model confirms that only a limited time series of a subset of the entire system is enough to make good correlation matrix predictions. Furthermore, using an unsupervised learning algorithm, we provide insights into the success of the predictions from our model. Finally, we apply the machine learning model developed here to real-world data sets.
Optimal Allocation of Many Robot Guards for Sweep-Line Coverage
Feb 08, 2023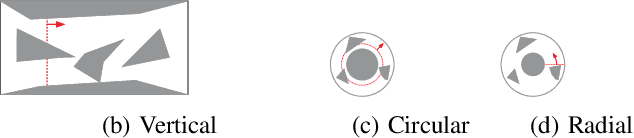

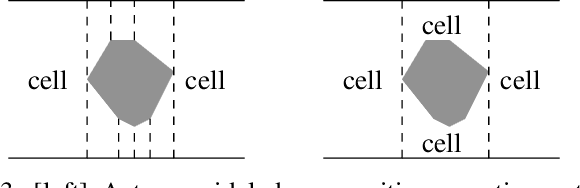
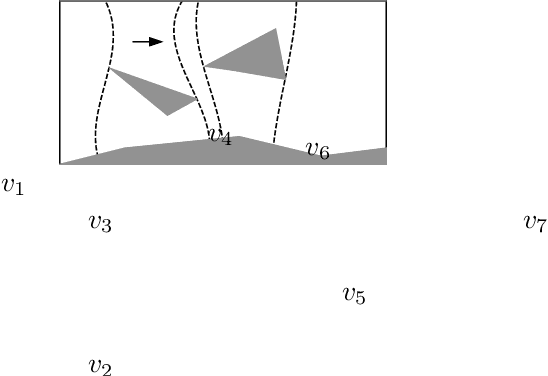
We study the problem of allocating many mobile robots for the execution of a pre-defined sweep schedule in a known two-dimensional environment, with applications toward search and rescue, coverage, surveillance, monitoring, pursuit-evasion, and so on. The mobile robots (or agents) are assumed to have one-dimensional sensing capability with probabilistic guarantees that deteriorate as the sensing distance increases. In solving such tasks, a time-parameterized distribution of robots along the sweep frontier must be computed, with the objective to minimize the number of robots used to achieve some desired coverage quality guarantee or to maximize the probabilistic guarantee for a given number of robots. We propose a max-flow based algorithm for solving the allocation task, which builds on a decomposition technique of the workspace as a generalization of the well-known boustrophedon decomposition. Our proposed algorithm has a very low polynomial running time and completes in under two seconds for polygonal environments with over $10^5$ vertices. Simulation experiments are carried out on three realistic use cases with randomly generated obstacles of varying shapes, sizes, and spatial distributions, which demonstrate the applicability and scalability our proposed method.
Empowering Graph Representation Learning with Test-Time Graph Transformation
Oct 07, 2022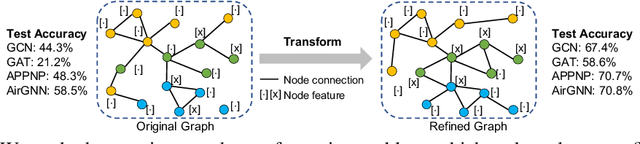
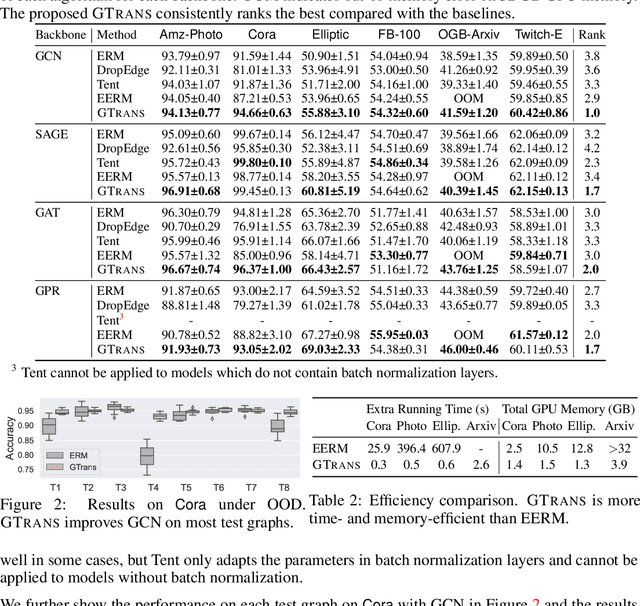
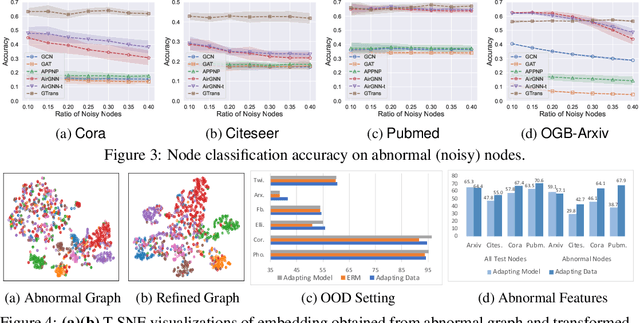
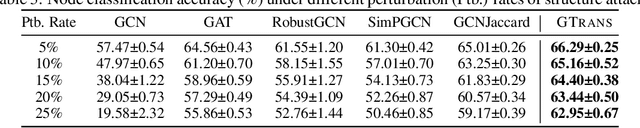
As powerful tools for representation learning on graphs, graph neural networks (GNNs) have facilitated various applications from drug discovery to recommender systems. Nevertheless, the effectiveness of GNNs is immensely challenged by issues related to data quality, such as distribution shift, abnormal features and adversarial attacks. Recent efforts have been made on tackling these issues from a modeling perspective which requires additional cost of changing model architectures or re-training model parameters. In this work, we provide a data-centric view to tackle these issues and propose a graph transformation framework named GTrans which adapts and refines graph data at test time to achieve better performance. We provide theoretical analysis on the design of the framework and discuss why adapting graph data works better than adapting the model. Extensive experiments have demonstrated the effectiveness of GTrans on three distinct scenarios for eight benchmark datasets where suboptimal data is presented. Remarkably, GTrans performs the best in most cases with improvements up to 2.8%, 8.2% and 3.8% over the best baselines on three experimental settings.
Demonstration-guided Deep Reinforcement Learning for Coordinated Ramp Metering and Perimeter Control in Large Scale Networks
Mar 04, 2023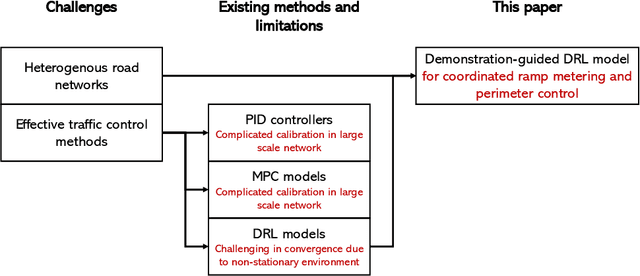
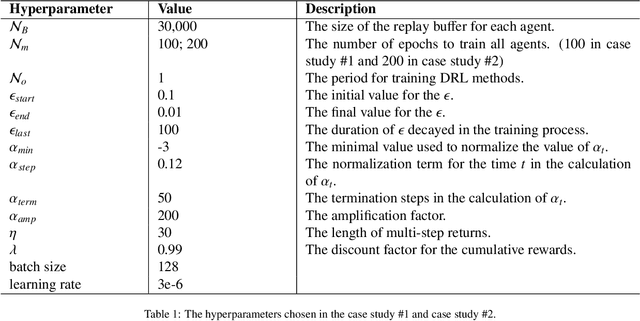
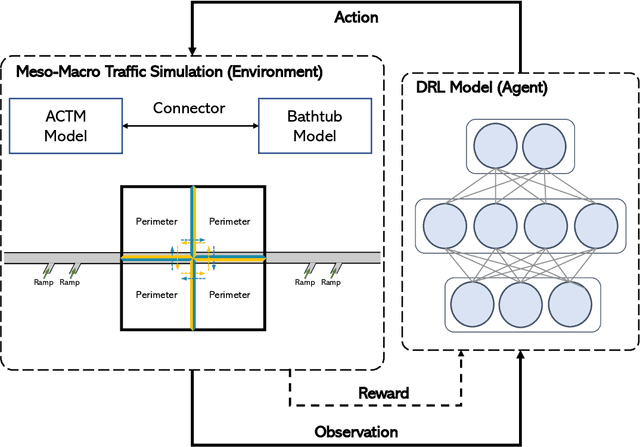
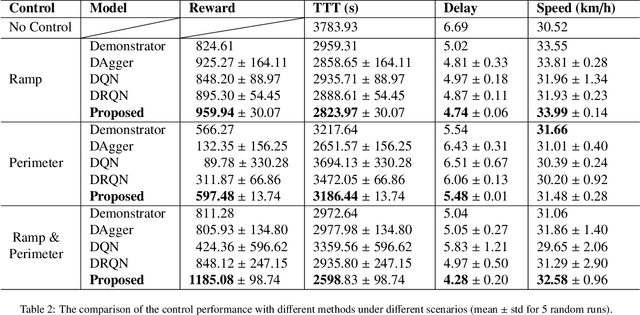
Effective traffic control methods have great potential in alleviating network congestion. Existing literature generally focuses on a single control approach, while few studies have explored the effectiveness of integrated and coordinated control approaches. This study considers two representative control approaches: ramp metering for freeways and perimeter control for homogeneous urban roads, and we aim to develop a deep reinforcement learning (DRL)-based coordinated control framework for large-scale networks. The main challenges are 1) there is a lack of efficient dynamic models for both freeways and urban roads; 2) the standard DRL method becomes ineffective due to the complex and non-stationary network dynamics. In view of this, we propose a novel meso-macro dynamic network model and first time develop a demonstration-guided DRL method to achieve large-scale coordinated ramp metering and perimeter control. The dynamic network model hybridizes the link and generalized bathtub models to depict the traffic dynamics of freeways and urban roads, respectively. For the DRL method, we incorporate demonstration to guide the DRL method for better convergence by introducing the concept of "teacher" and "student" models. The teacher models are traditional controllers (e.g., ALINEA, Gating), which provide control demonstrations. The student models are DRL methods, which learn from the teacher and aim to surpass the teacher's performance. To validate the proposed framework, we conduct two case studies in a small-scale network and a real-world large-scale traffic network in Hong Kong. The research outcome reveals the great potential of combining traditional controllers with DRL for coordinated control in large-scale networks.
TTT-UCDR: Test-time Training for Universal Cross-Domain Retrieval
Aug 19, 2022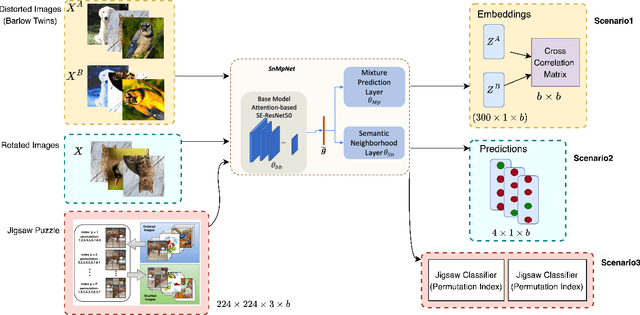
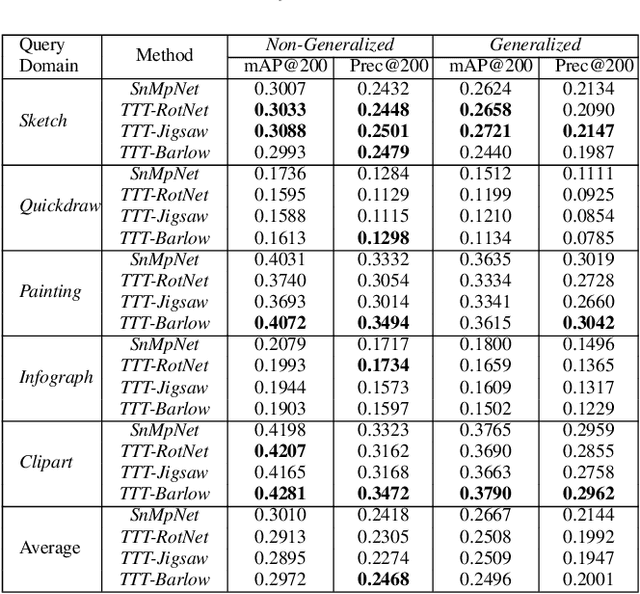
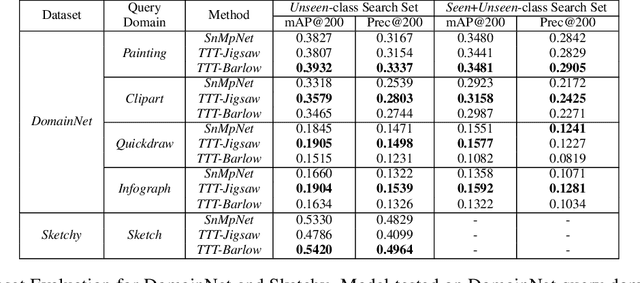
Image retrieval is a niche problem in computer vision curated towards finding similar images in a database using a query. In this work, for the first time in literature, we employ test-time training techniques for adapting to distribution shifts under Universal Cross-Domain Retrieval (UCDR). Test-time training has previously been shown to reduce generalization error for image classification, domain adaptation, semantic segmentation, and zero-shot sketch-based image retrieval (ZS-SBIR). In UCDR, in addition to the semantic shift of unknown categories present in ZS-SBIR, the presence of unknown domains leads to even higher distribution shifts. To bridge this domain gap, we use self-supervision through 3 different losses - Barlow Twins, Jigsaw Puzzle and RotNet on a pretrained network at test-time. This simple approach leads to improvements on UCDR benchmarks and also improves model robustness under a challenging cross-dataset generalization setting.
mmWave Coverage Extension Using Reconfigurable Intelligent Surfaces in Indoor Dense Spaces
Feb 18, 2023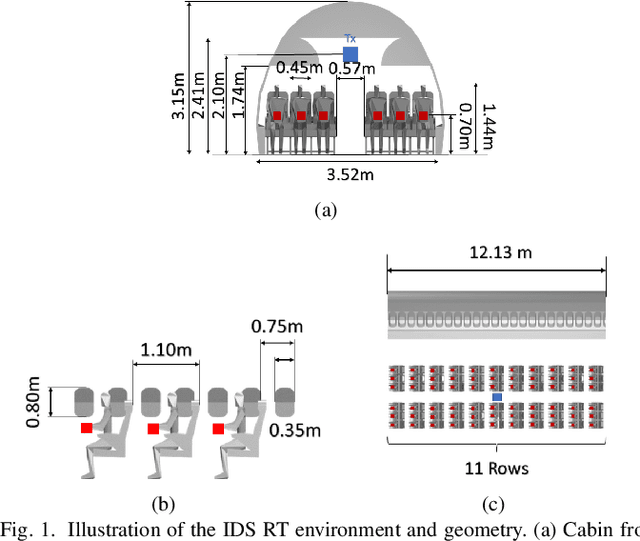
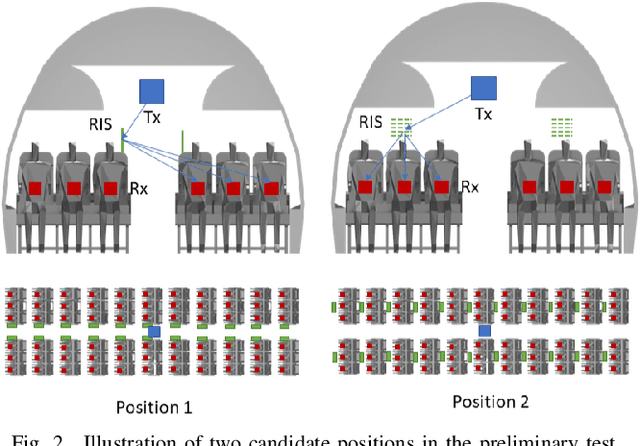
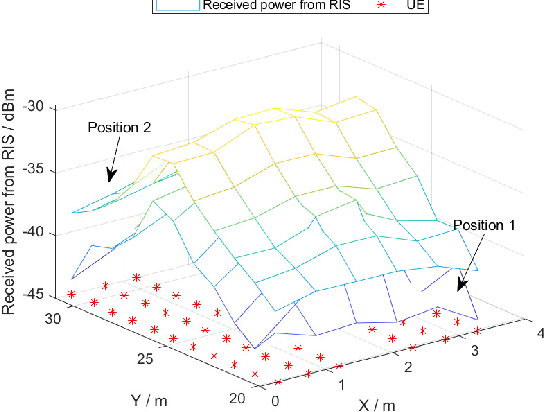
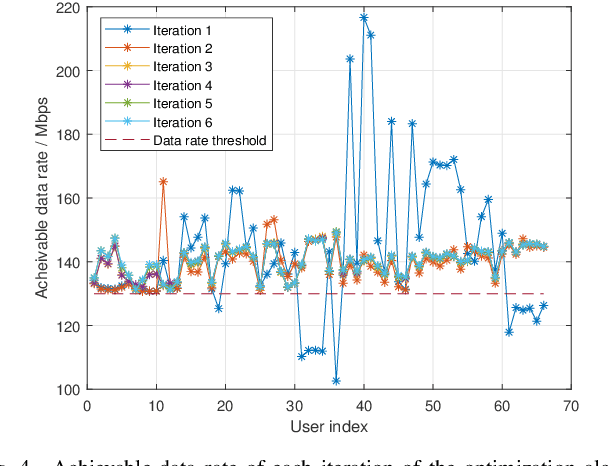
In this work, we consider the deployment of reconfigurable intelligent surfaces (RISs) to extend the coverage of a millimeter-wave (mmWave) network in indoor dense spaces. We first integrate RIS into ray-tracing simulations to realistically capture the propagation characteristics, then formulate a non-convex optimization problem that minimizes the number of RISs under rate constraints. We propose a feasible point pursuit and successive convex approximation-based algorithm, which solves the problem by jointly selecting the RIS locations, optimizing the RIS phase-shifts, and allocating time resources to user equipments (UEs). The numerical results demonstrate substantial coverage extension by using at least four RISs, and a data rate of 130 Mbit/s is guaranteed for UEs in the considered area of an airplane cabin.