 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Semi-Supervised Approach for Early Stuck Sign Detection in Drilling Operations
Feb 24, 2023
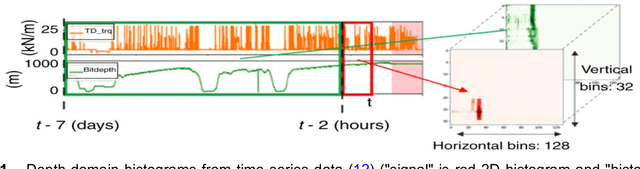
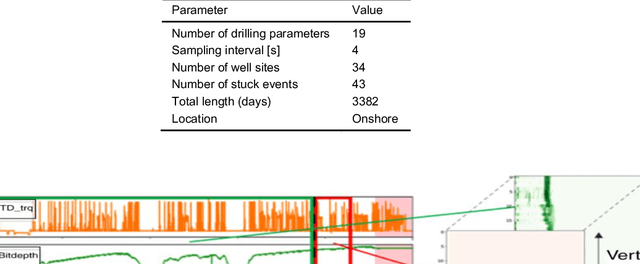
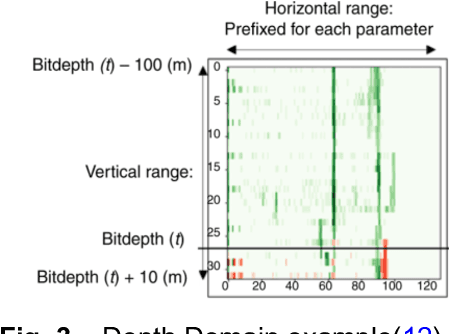
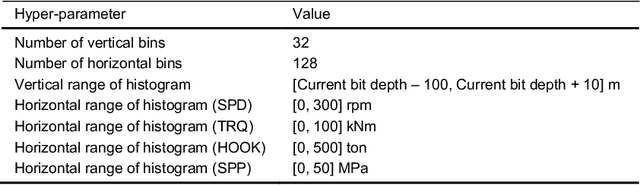
A real-time stuck pipe prediction methodology is proposed in this paper. We assume early signs of stuck pipe to be apparent when the drilling data behavior deviates from that from normal drilling operations. The definition of normalcy changes with drill string configuration or geological conditions. Here, a depth-domain data representation is adopted to capture the localized normal behavior. Several models, based on auto-encoder and variational auto-encoders, are trained on regular drilling data extracted from actual drilling data. When the trained model is applied to data sets before stuck incidents, eight incidents showed large reconstruction errors. These results suggest better performance than the previously reported supervised approach. Inter-comparison of various models reveals the robustness of our approach. The model performance depends on the featured parameter suggesting the need for multiple models in actual operation.
Modelling Temporal Document Sequences for Clinical ICD Coding
Feb 24, 2023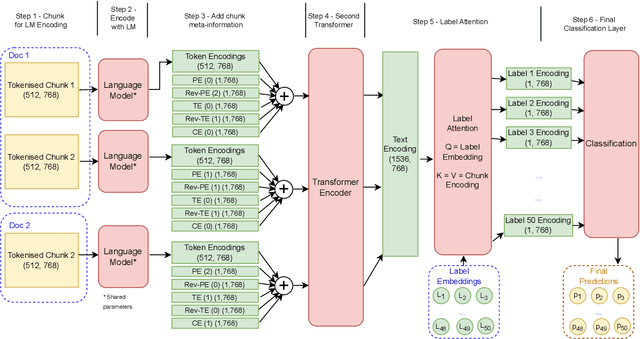
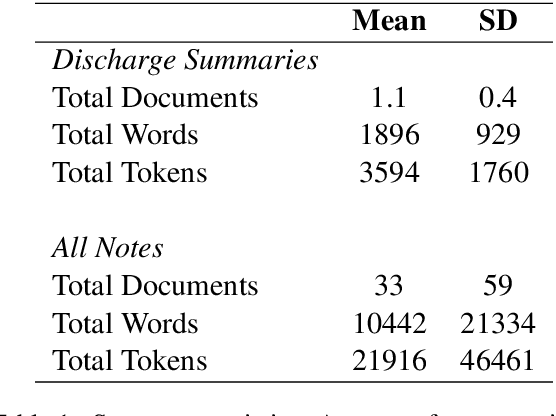
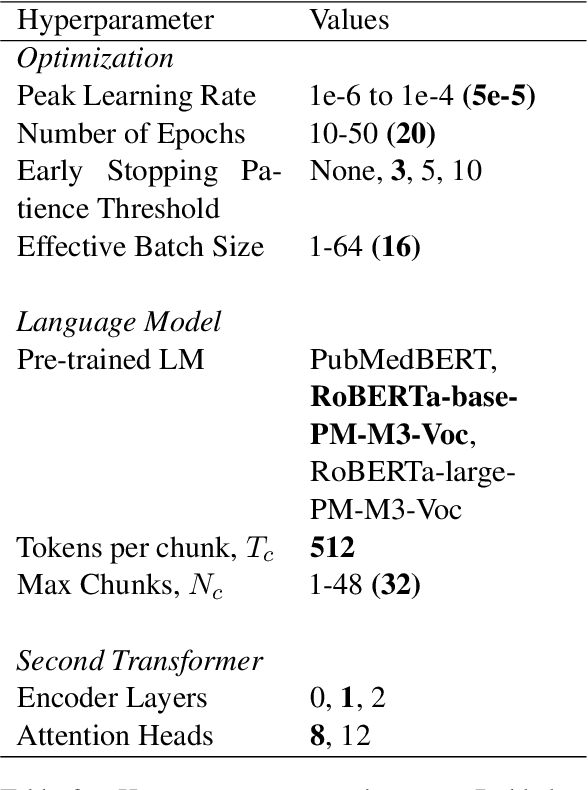
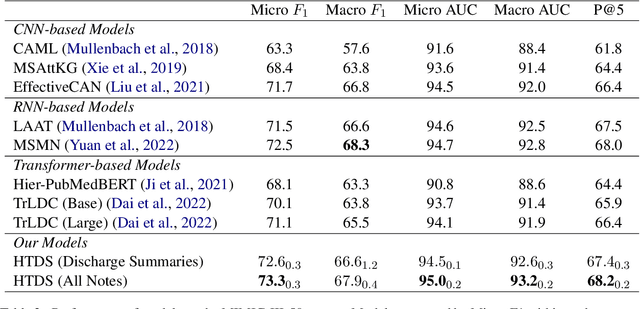
Past studies on the ICD coding problem focus on predicting clinical codes primarily based on the discharge summary. This covers only a small fraction of the notes generated during each hospital stay and leaves potential for improving performance by analysing all the available clinical notes. We propose a hierarchical transformer architecture that uses text across the entire sequence of clinical notes in each hospital stay for ICD coding, and incorporates embeddings for text metadata such as their position, time, and type of note. While using all clinical notes increases the quantity of data substantially, superconvergence can be used to reduce training costs. We evaluate the model on the MIMIC-III dataset. Our model exceeds the prior state-of-the-art when using only discharge summaries as input, and achieves further performance improvements when all clinical notes are used as input.
Better Predict the Dynamic of Geometry of In-Pit Stockpiles Using Geospatial Data and Polygon Models
Feb 24, 2023
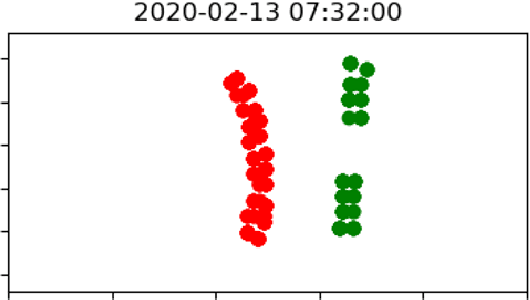
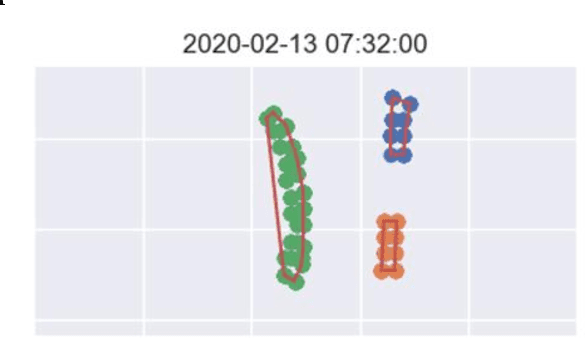
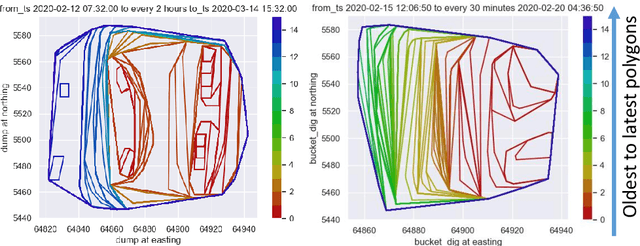
Modelling stockpile is a key factor of a project economic and operation in mining, because not all the mined ores are not able to mill for many reasons. Further, the financial value of the ore in the stockpile needs to be reflected on the balance sheet. Therefore, automatically tracking the frontiers of the stockpile facilitates the mine scheduling engineers to calculate the tonnage of the ore remaining in the stockpile. This paper suggests how the dynamic of stockpile shape changes caused by dumping and reclaiming operations can be inferred using polygon models. The presented work also demonstrates how the geometry of stockpiles can be inferred in the absence of reclaimed bucket information, in which case the reclaim polygons are established using the diggers GPS positional data at the time of truck loading. This work further compares two polygon models for creating 2D shapes.
User-Centric Evaluation of OCR Systems for Kwak'wala
Feb 26, 2023
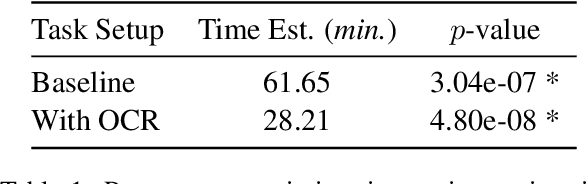
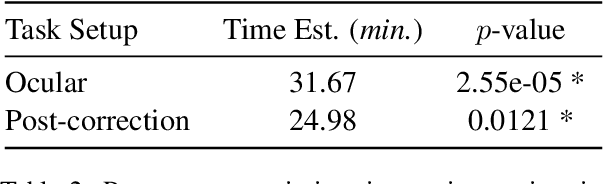
There has been recent interest in improving optical character recognition (OCR) for endangered languages, particularly because a large number of documents and books in these languages are not in machine-readable formats. The performance of OCR systems is typically evaluated using automatic metrics such as character and word error rates. While error rates are useful for the comparison of different models and systems, they do not measure whether and how the transcriptions produced from OCR tools are useful to downstream users. In this paper, we present a human-centric evaluation of OCR systems, focusing on the Kwak'wala language as a case study. With a user study, we show that utilizing OCR reduces the time spent in the manual transcription of culturally valuable documents -- a task that is often undertaken by endangered language community members and researchers -- by over 50%. Our results demonstrate the potential benefits that OCR tools can have on downstream language documentation and revitalization efforts.
Sim-and-Real Reinforcement Learning for Manipulation: A Consensus-based Approach
Feb 26, 2023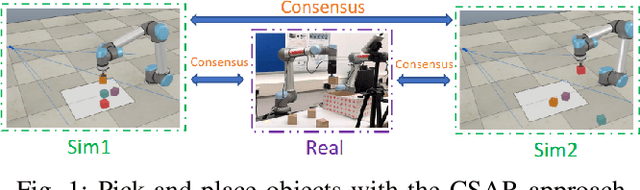

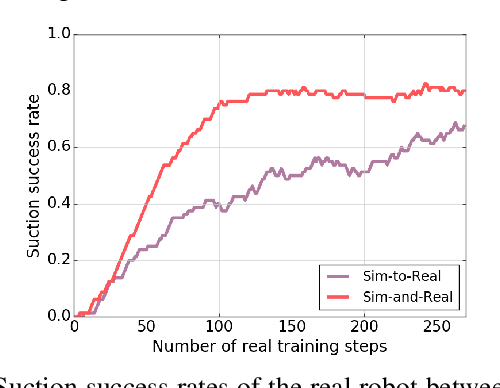
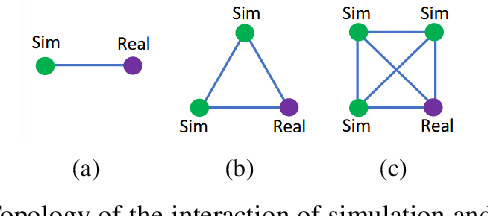
Sim-and-real training is a promising alternative to sim-to-real training for robot manipulations. However, the current sim-and-real training is neither efficient, i.e., slow convergence to the optimal policy, nor effective, i.e., sizeable real-world robot data. Given limited time and hardware budgets, the performance of sim-and-real training is not satisfactory. In this paper, we propose a Consensus-based Sim-And-Real deep reinforcement learning algorithm (CSAR) for manipulator pick-and-place tasks, which shows comparable performance in both sim-and-real worlds. In this algorithm, we train the agents in simulators and the real world to get the optimal policies for both sim-and-real worlds. We found two interesting phenomenons: (1) Best policy in simulation is not the best for sim-and-real training. (2) The more simulation agents, the better sim-and-real training. The experimental video is available at: https://youtu.be/mcHJtNIsTEQ.
No-Regret Linear Bandits beyond Realizability
Feb 26, 2023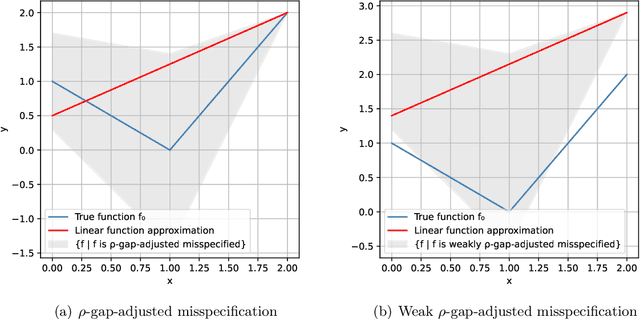
We study linear bandits when the underlying reward function is not linear. Existing work relies on a uniform misspecification parameter $\epsilon$ that measures the sup-norm error of the best linear approximation. This results in an unavoidable linear regret whenever $\epsilon > 0$. We describe a more natural model of misspecification which only requires the approximation error at each input $x$ to be proportional to the suboptimality gap at $x$. It captures the intuition that, for optimization problems, near-optimal regions should matter more and we can tolerate larger approximation errors in suboptimal regions. Quite surprisingly, we show that the classical LinUCB algorithm -- designed for the realizable case -- is automatically robust against such gap-adjusted misspecification. It achieves a near-optimal $\sqrt{T}$ regret for problems that the best-known regret is almost linear in time horizon $T$. Technically, our proof relies on a novel self-bounding argument that bounds the part of the regret due to misspecification by the regret itself.
A Miniaturised Camera-based Multi-Modal Tactile Sensor
Mar 06, 2023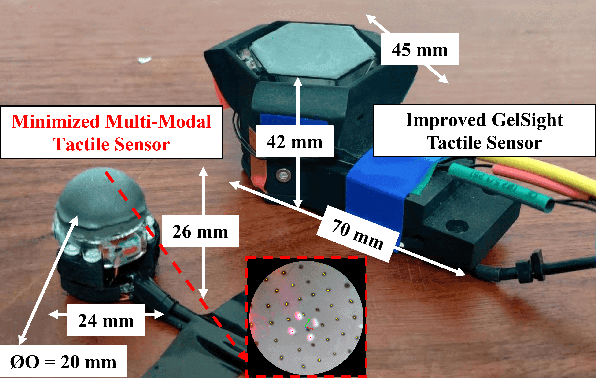
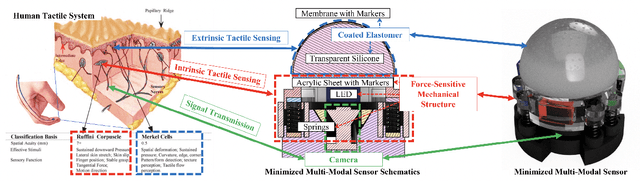
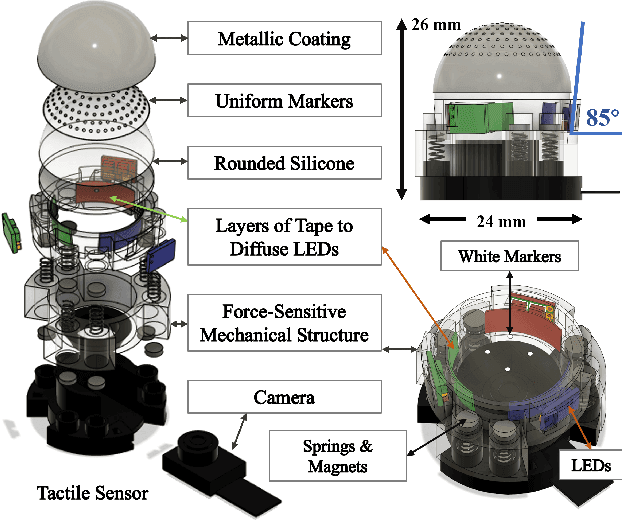
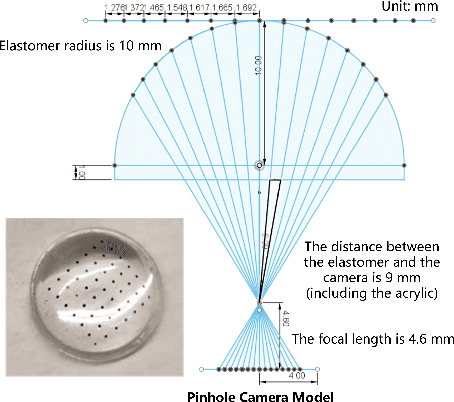
In conjunction with huge recent progress in camera and computer vision technology, camera-based sensors have increasingly shown considerable promise in relation to tactile sensing. In comparison to competing technologies (be they resistive, capacitive or magnetic based), they offer super-high-resolution, while suffering from fewer wiring problems. The human tactile system is composed of various types of mechanoreceptors, each able to perceive and process distinct information such as force, pressure, texture, etc. Camera-based tactile sensors such as GelSight mainly focus on high-resolution geometric sensing on a flat surface, and their force measurement capabilities are limited by the hysteresis and non-linearity of the silicone material. In this paper, we present a miniaturised dome-shaped camera-based tactile sensor that allows accurate force and tactile sensing in a single coherent system. The key novelty of the sensor design is as follows. First, we demonstrate how to build a smooth silicone hemispheric sensing medium with uniform markers on its curved surface. Second, we enhance the illumination of the rounded silicone with diffused LEDs. Third, we construct a force-sensitive mechanical structure in a compact form factor with usage of springs to accurately perceive forces. Our multi-modal sensor is able to acquire tactile information from multi-axis forces, local force distribution, and contact geometry, all in real-time. We apply an end-to-end deep learning method to process all the information.
HARDC : A novel ECG-based heartbeat classification method to detect arrhythmia using hierarchical attention based dual structured RNN with dilated CNN
Mar 06, 2023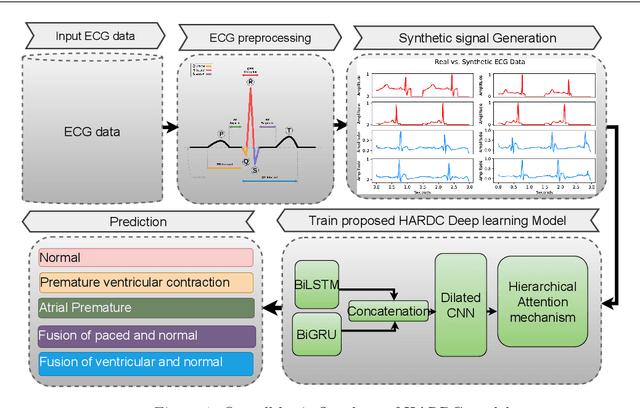
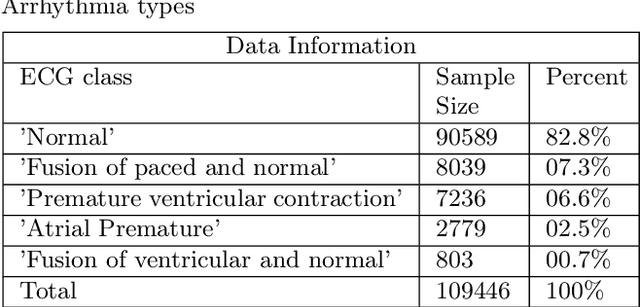
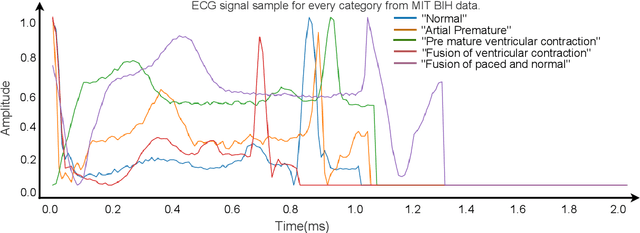
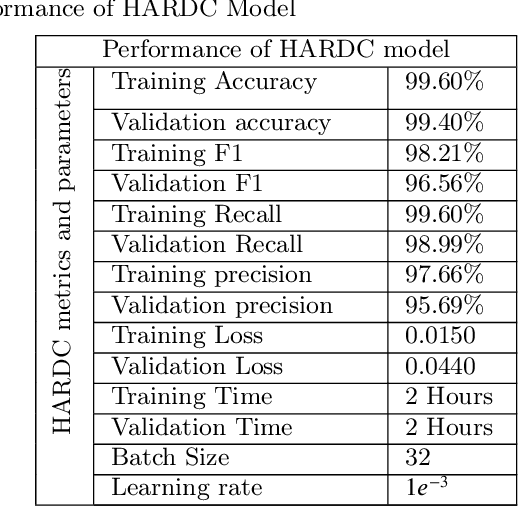
In this paper have developed a novel hybrid hierarchical attention-based bidirectional recurrent neural network with dilated CNN (HARDC) method for arrhythmia classification. This solves problems that arise when traditional dilated convolutional neural network (CNN) models disregard the correlation between contexts and gradient dispersion. The proposed HARDC fully exploits the dilated CNN and bidirectional recurrent neural network unit (BiGRU-BiLSTM) architecture to generate fusion features. As a result of incorporating both local and global feature information and an attention mechanism, the model's performance for prediction is improved.By combining the fusion features with a dilated CNN and a hierarchical attention mechanism, the trained HARDC model showed significantly improved classification results and interpretability of feature extraction on the PhysioNet 2017 challenge dataset. Sequential Z-Score normalization, filtering, denoising, and segmentation are used to prepare the raw data for analysis. CGAN (Conditional Generative Adversarial Network) is then used to generate synthetic signals from the processed data. The experimental results demonstrate that the proposed HARDC model significantly outperforms other existing models, achieving an accuracy of 99.60\%, F1 score of 98.21\%, a precision of 97.66\%, and recall of 99.60\% using MIT-BIH generated ECG. In addition, this approach substantially reduces run time when using dilated CNN compared to normal convolution. Overall, this hybrid model demonstrates an innovative and cost-effective strategy for ECG signal compression and high-performance ECG recognition. Our results indicate that an automated and highly computed method to classify multiple types of arrhythmia signals holds considerable promise.
Game Networking and its Evolution towards Supporting Metaverse through the 6G Wireless Systems
Feb 03, 2023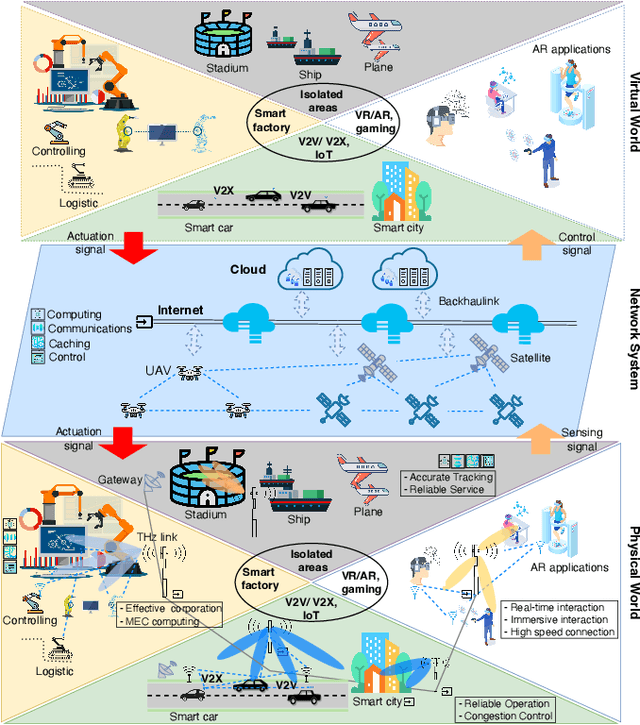
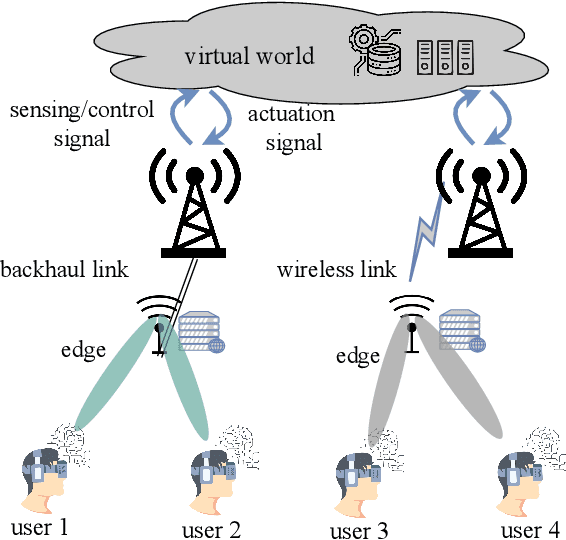
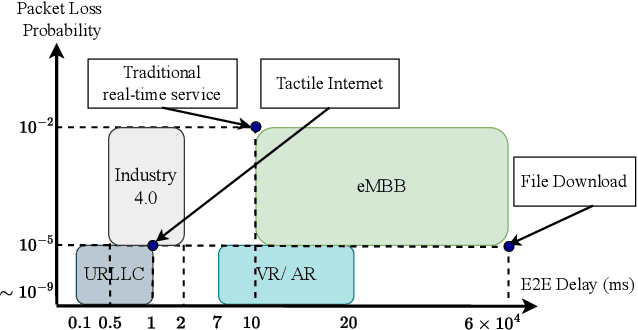
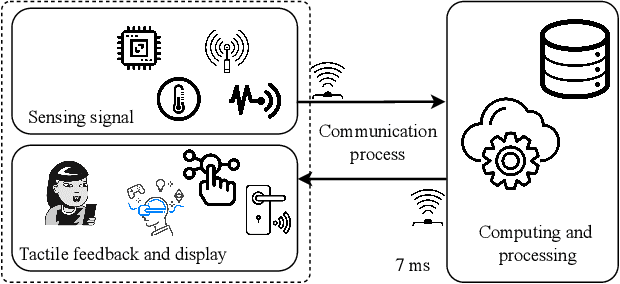
The sixth generation (6G) of wireless technology is seen as one of the enablers of real-time fusion of the physical and digital realms, as in the Metaverse, extended reality (XR), or Digital Twin (DT). This would allow people to interact, work, and entertain themselves in immersive online 3D virtual environments. From the viewpoint of communication and networking, this will represent an evolution of the game networking technology, designed to interconnect massive users in real-time online gaming environments. This article presents the basic principles of game networking and discusses their evolution towards meeting the requirements of the Metaverse and similar applications. Several open research challenges are provided, along with possible solutions.
From Time Series to Networks in R with the ts2net Package
Aug 20, 2022
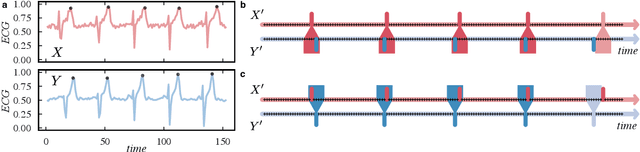
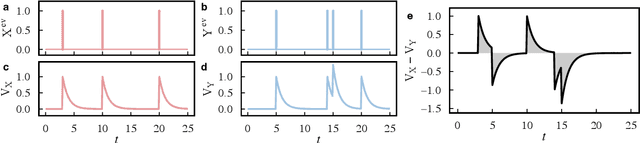
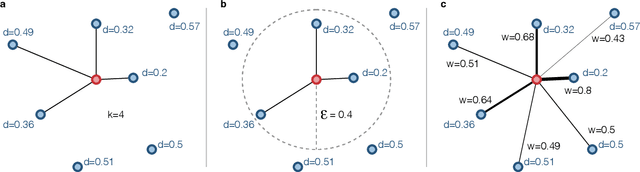
Network science established itself as a prominent tool for modeling time series and complex systems. This modeling process consists of transforming a set or a single time series into a network. Nodes may represent complete time series, segments, or single values, while links define associations or similarities between the represented parts. R is one of the main programming languages used in data science, statistics, and machine learning, with many packages available. However, no single package provides the necessary methods to transform time series into networks. This paper presents ts2net, an R package for modeling one or multiple time series into networks. The package provides the time series distance functions that can be easily computed in parallel and in supercomputers to process larger data sets and methods to transform distance matrices into networks. Ts2net also provides methods to transform a single time series into a network, such as recurrence networks, visibility graphs, and transition networks. Together with other packages, ts2net permits using network science and graph mining tools to extract information from time series.