 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
DMSA: Dynamic Multi-scale Unsupervised Semantic Segmentation Based on Adaptive Affinity
Mar 01, 2023
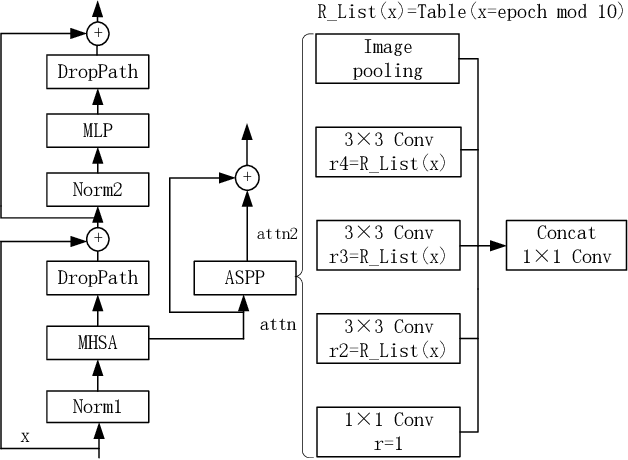
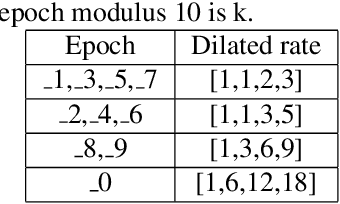
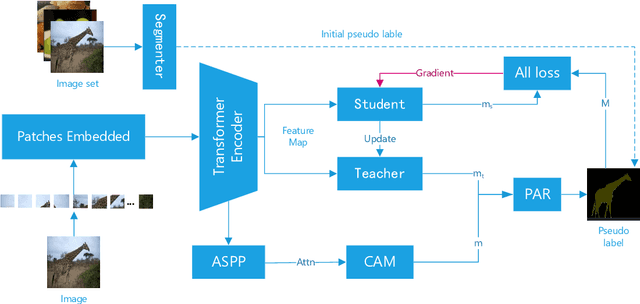
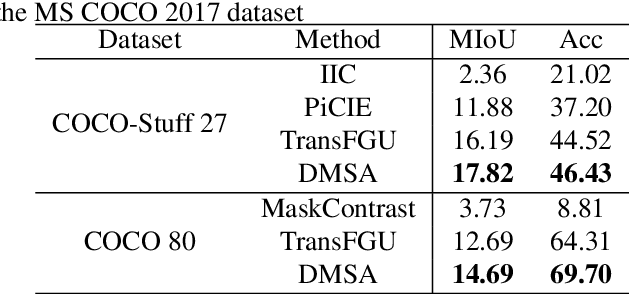
The proposed method in this paper proposes an end-to-end unsupervised semantic segmentation architecture DMSA based on four loss functions. The framework uses Atrous Spatial Pyramid Pooling (ASPP) module to enhance feature extraction. At the same time, a dynamic dilation strategy is designed to better capture multi-scale context information. Secondly, a Pixel-Adaptive Refinement (PAR) module is introduced, which can adaptively refine the initial pseudo labels after feature fusion to obtain high quality pseudo labels. Experiments show that the proposed DSMA framework is superior to the existing methods on the saliency dataset. On the COCO 80 dataset, the MIoU is improved by 2.0, and the accuracy is improved by 5.39. On the Pascal VOC 2012 Augmented dataset, the MIoU is improved by 4.9, and the accuracy is improved by 3.4. In addition, the convergence speed of the model is also greatly improved after the introduction of the PAR module.
A comparative study of human inverse kinematics techniques for lower limbs
Feb 22, 2023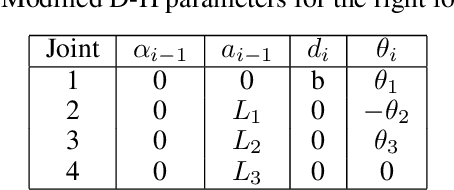
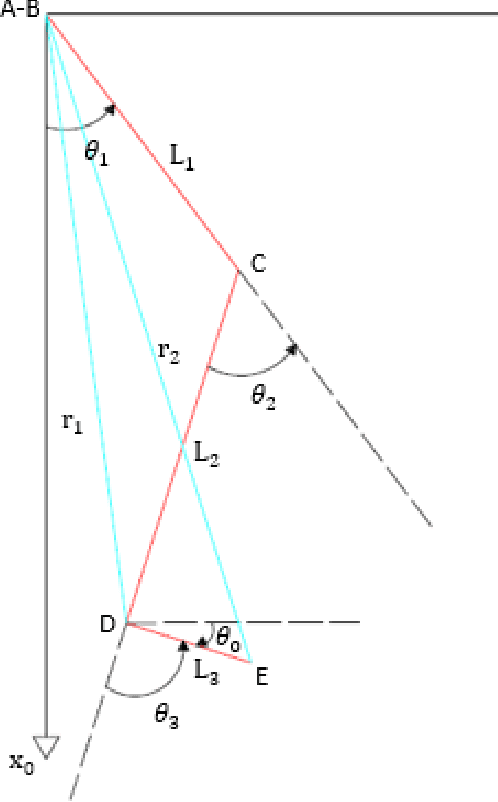
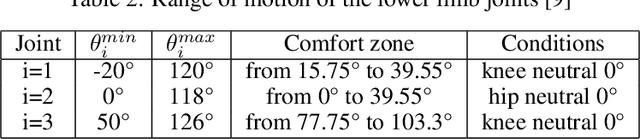
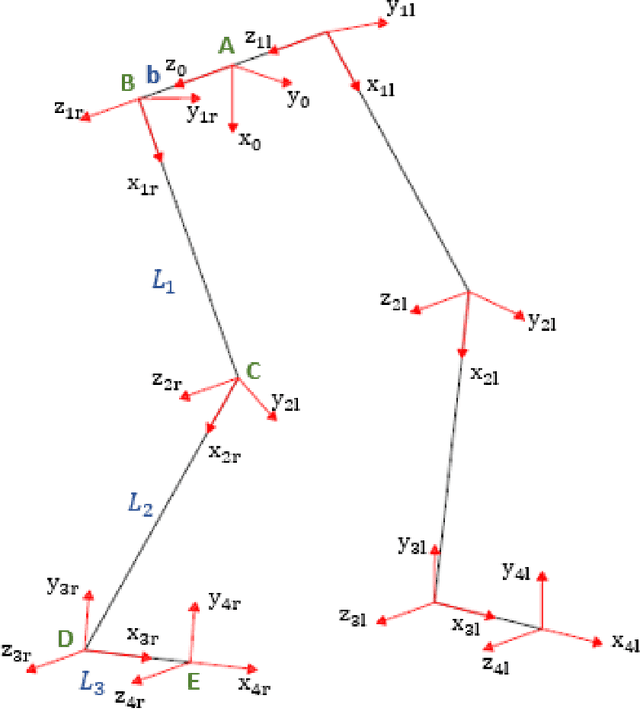
Inverse Kinematics (IK) has been an active research topic and many methods have been introduced to provide a fast and accurate solution. However, high computational cost and the generation of unrealistic positions constitute the weak points in most existing IK methods. In this paper, a comparative study was established to analyze the performance of popular IK techniques applied to the human leg. The objective is to determine the most efficient method in terms of computation time and to reach the desired position with a realistic human posture while respecting the range of motion and joint comfort zones of every joint.
MSDA: Monocular Self-supervised Domain Adaptation for 6D Object Pose Estimation
Feb 14, 2023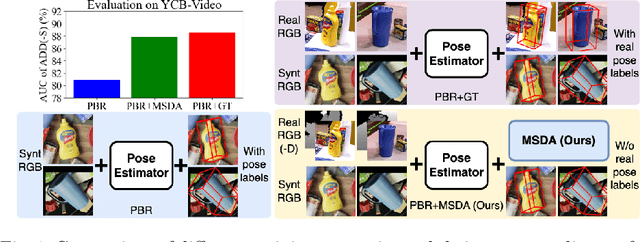
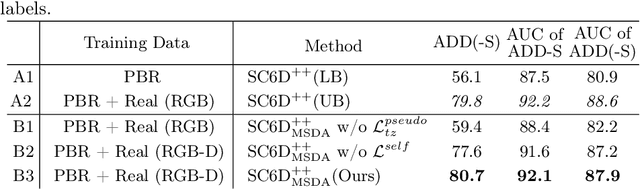
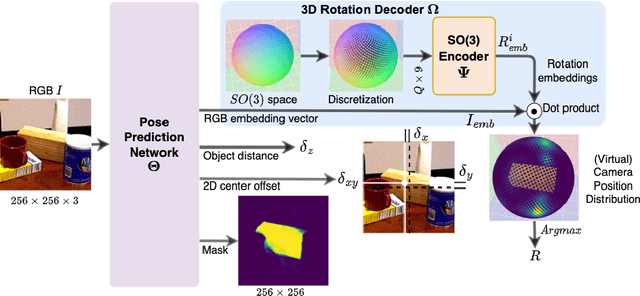
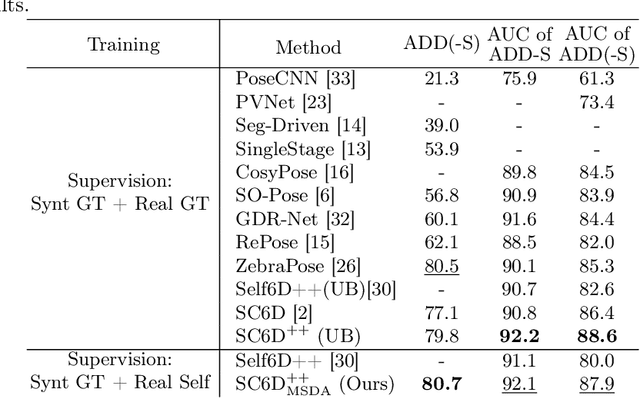
Acquiring labeled 6D poses from real images is an expensive and time-consuming task. Though massive amounts of synthetic RGB images are easy to obtain, the models trained on them suffer from noticeable performance degradation due to the synthetic-to-real domain gap. To mitigate this degradation, we propose a practical self-supervised domain adaptation approach that takes advantage of real RGB(-D) data without needing real pose labels. We first pre-train the model with synthetic RGB images and then utilize real RGB(-D) images to fine-tune the pre-trained model. The fine-tuning process is self-supervised by the RGB-based pose-aware consistency and the depth-guided object distance pseudo-label, which does not require the time-consuming online differentiable rendering. We build our domain adaptation method based on the recent pose estimator SC6D and evaluate it on the YCB-Video dataset. We experimentally demonstrate that our method achieves comparable performance against its fully-supervised counterpart while outperforming existing state-of-the-art approaches.
Run, Don't Walk: Chasing Higher FLOPS for Faster Neural Networks
Mar 07, 2023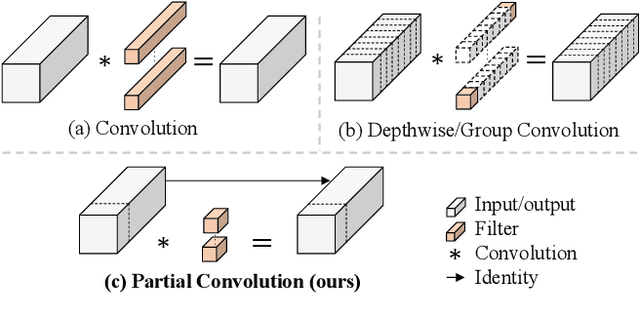
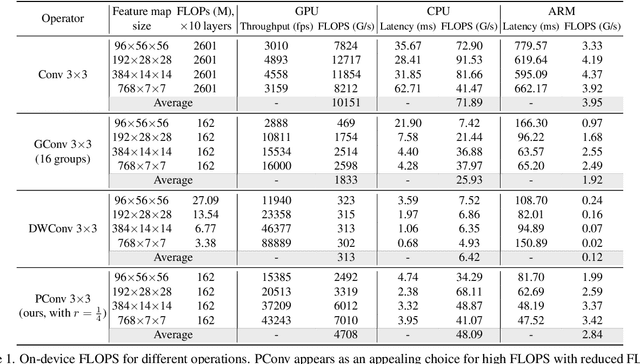
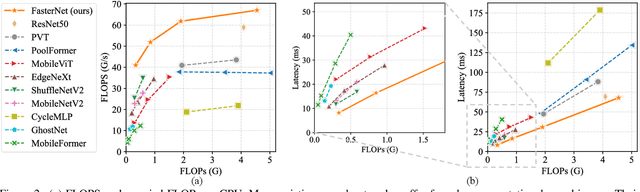
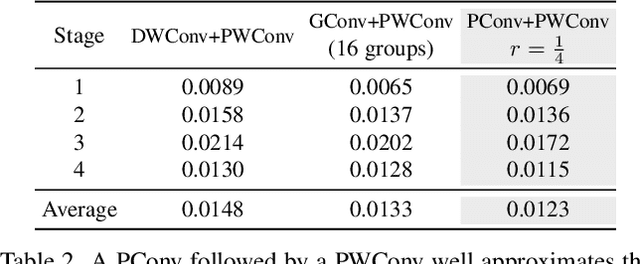
To design fast neural networks, many works have been focusing on reducing the number of floating-point operations (FLOPs). We observe that such reduction in FLOPs, however, does not necessarily lead to a similar level of reduction in latency. This mainly stems from inefficiently low floating-point operations per second (FLOPS). To achieve faster networks, we revisit popular operators and demonstrate that such low FLOPS is mainly due to frequent memory access of the operators, especially the depthwise convolution. We hence propose a novel partial convolution (PConv) that extracts spatial features more efficiently, by cutting down redundant computation and memory access simultaneously. Building upon our PConv, we further propose FasterNet, a new family of neural networks, which attains substantially higher running speed than others on a wide range of devices, without compromising on accuracy for various vision tasks. For example, on ImageNet-1k, our tiny FasterNet-T0 is $3.1\times$, $3.1\times$, and $2.5\times$ faster than MobileViT-XXS on GPU, CPU, and ARM processors, respectively, while being $2.9\%$ more accurate. Our large FasterNet-L achieves impressive $83.5\%$ top-1 accuracy, on par with the emerging Swin-B, while having $49\%$ higher inference throughput on GPU, as well as saving $42\%$ compute time on CPU. Code is available at \url{https://github.com/JierunChen/FasterNet}.
GMCR: Graph-based Maximum Consensus Estimation for Point Cloud Registration
Mar 07, 2023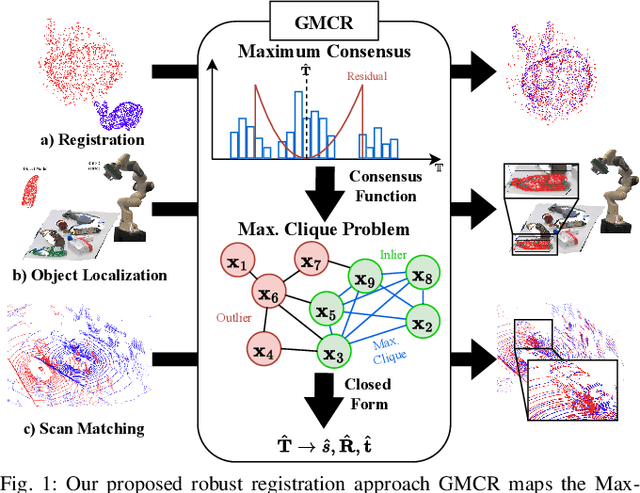
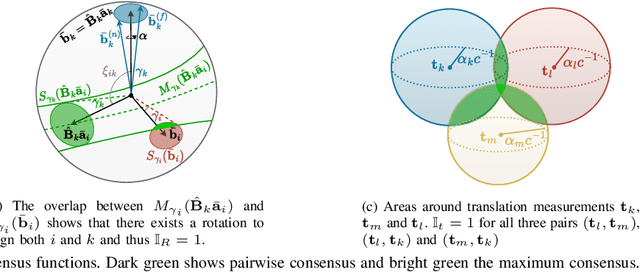
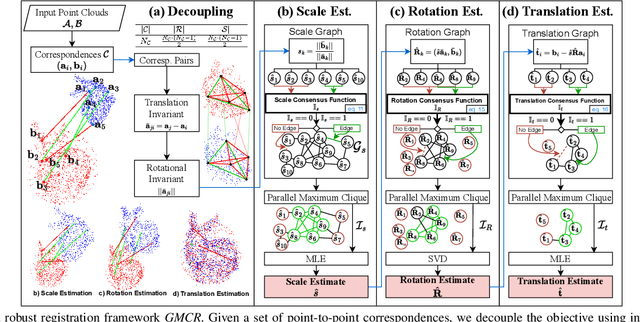
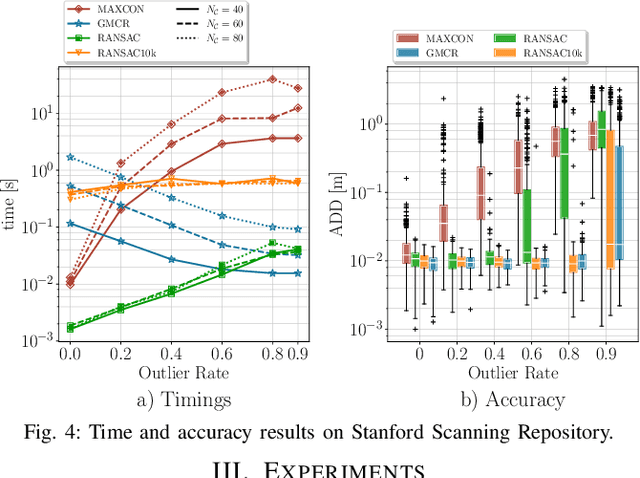
Point cloud registration is a fundamental and challenging problem for autonomous robots interacting in unstructured environments for applications such as object pose estimation, simultaneous localization and mapping, robot-sensor calibration, and so on. In global correspondence-based point cloud registration, data association is a highly brittle task and commonly produces high amounts of outliers. Failure to reject outliers can lead to errors propagating to downstream perception tasks. Maximum Consensus (MC) is a widely used technique for robust estimation, which is however known to be NP-hard. Exact methods struggle to scale to realistic problem instances, whereas high outlier rates are challenging for approximate methods. To this end, we propose Graph-based Maximum Consensus Registration (GMCR), which is highly robust to outliers and scales to realistic problem instances. We propose novel consensus functions to map the decoupled MC-objective to the graph domain, wherein we find a tight approximation to the maximum consensus set as the maximum clique. The final pose estimate is given in closed-form. We extensively evaluated our proposed GMCR on a synthetic registration benchmark, robotic object localization task, and additionally on a scan matching benchmark. Our proposed method shows high accuracy and time efficiency compared to other state-of-the-art MC methods and compares favorably to other robust registration methods.
TIMS: A Tactile Internet-Based Micromanipulation System with Haptic Guidance for Surgical Training
Mar 07, 2023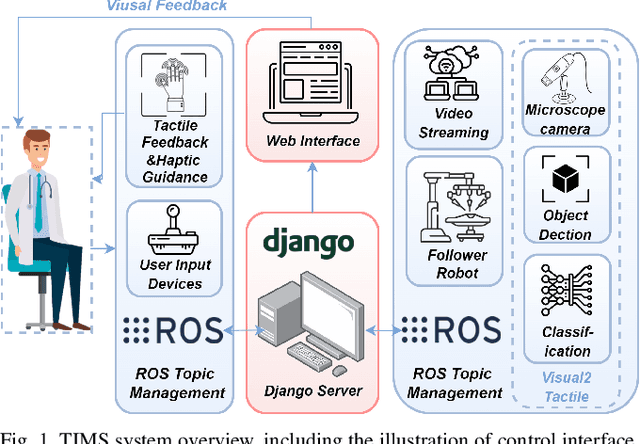
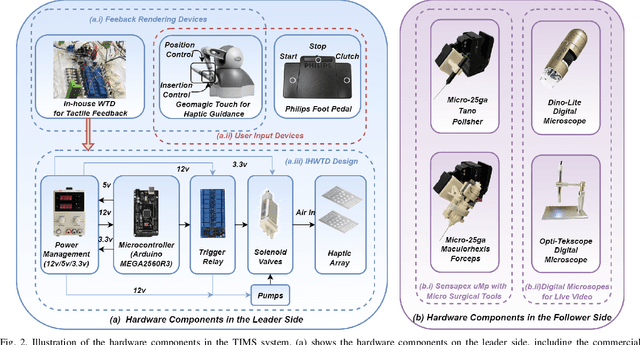
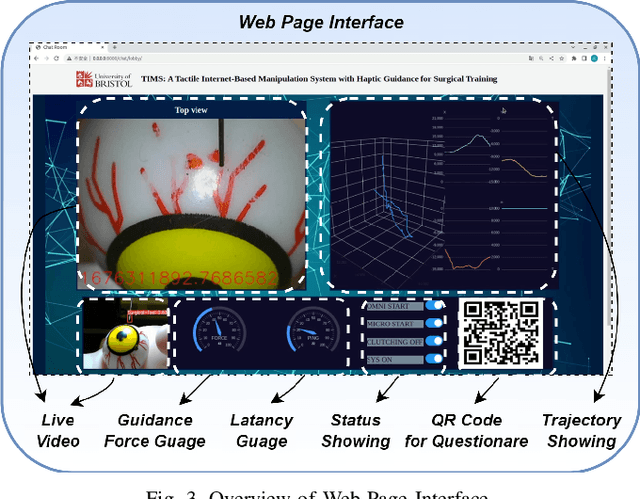
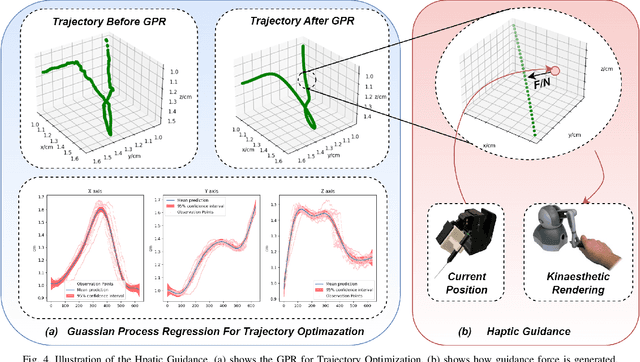
Microsurgery involves the dexterous manipulation of delicate tissue or fragile structures such as small blood vessels, nerves, etc., under a microscope. To address the limitation of imprecise manipulation of human hands, robotic systems have been developed to assist surgeons in performing complex microsurgical tasks with greater precision and safety. However, the steep learning curve for robot-assisted microsurgery (RAMS) and the shortage of well-trained surgeons pose significant challenges to the widespread adoption of RAMS. Therefore, the development of a versatile training system for RAMS is necessary, which can bring tangible benefits to both surgeons and patients. In this paper, we present a Tactile Internet-Based Micromanipulation System (TIMS) based on a ROS-Django web-based architecture for microsurgical training. This system can provide tactile feedback to operators via a wearable tactile display (WTD), while real-time data is transmitted through the internet via a ROS-Django framework. In addition, TIMS integrates haptic guidance to `guide' the trainees to follow a desired trajectory provided by expert surgeons. Learning from demonstration based on Gaussian Process Regression (GPR) was used to generate the desired trajectory. User studies were also conducted to verify the effectiveness of our proposed TIMS, comparing users' performance with and without tactile feedback and/or haptic guidance.
Learning When to Treat Business Processes: Prescriptive Process Monitoring with Causal Inference and Reinforcement Learning
Mar 07, 2023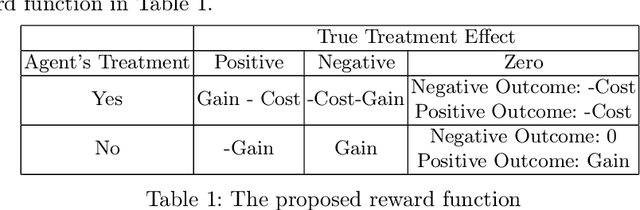
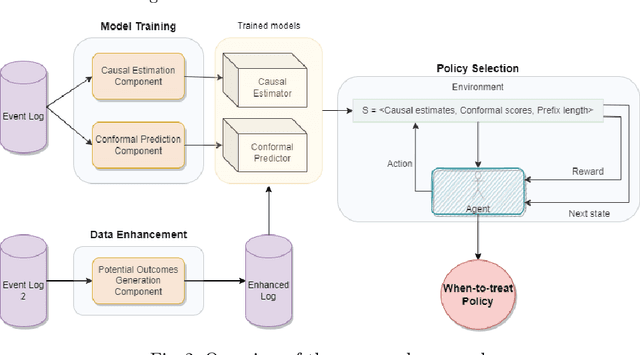

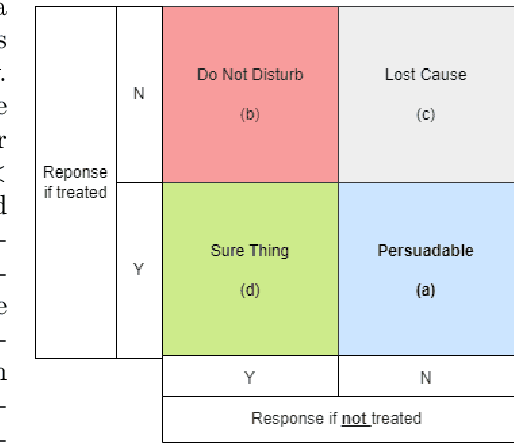
Increasing the success rate of a process, i.e. the percentage of cases that end in a positive outcome, is a recurrent process improvement goal. At runtime, there are often certain actions (a.k.a. treatments) that workers may execute to lift the probability that a case ends in a positive outcome. For example, in a loan origination process, a possible treatment is to issue multiple loan offers to increase the probability that the customer takes a loan. Each treatment has a cost. Thus, when defining policies for prescribing treatments to cases, managers need to consider the net gain of the treatments. Also, the effect of a treatment varies over time: treating a case earlier may be more effective than later in a case. This paper presents a prescriptive monitoring method that automates this decision-making task. The method combines causal inference and reinforcement learning to learn treatment policies that maximize the net gain. The method leverages a conformal prediction technique to speed up the convergence of the reinforcement learning mechanism by separating cases that are likely to end up in a positive or negative outcome, from uncertain cases. An evaluation on two real-life datasets shows that the proposed method outperforms a state-of-the-art baseline.
Geometry-Aware Coverage Path Planning on Complex 3D Surfaces
Mar 07, 2023
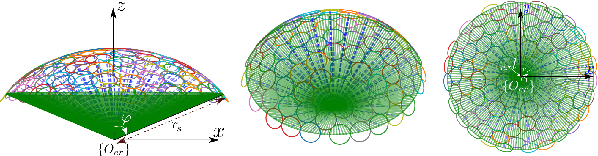
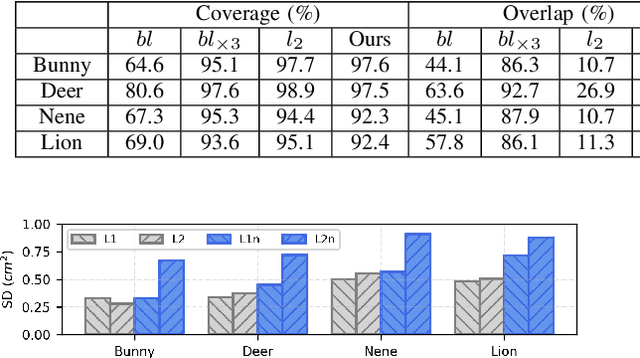
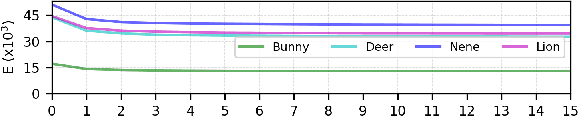
This paper presents a new approach to obtaining nearly complete coverage paths (CP) with low overlapping on 3D general surfaces using mesh models given or reconstructed from actual scenes. The CP is obtained by segmenting the mesh model into a given number of clusters using constrained centroidal Voronoi tessellation (CCVT) and finding the shortest path from cluster centroids using the geodesic metric efficiently. We introduce a new cost function to harmoniously achieve uniform areas of the obtained clusters and a restriction on the variation of triangle normals during the construction of CCVTs. The obtained clusters can be used to construct high-quality viewpoints (VP) for visual coverage tasks. Here, we utilize the planned VPs as cleaning configurations to perform residual powder removal in additive manufacturing using manipulator robots. The self-occlusion of VPs and ensuring collision-free robot configurations are addressed by integrating a proposed optimization-based strategy to find a set of candidate rays for each VP into the motion planning phase. CP planning benchmarks and physical experiments are conducted to demonstrate the effectiveness of the proposed approach. We show that our approach can compute the CPs and VPs of various mesh models with a massive number of triangles within a reasonable time.
AI for Science: An Emerging Agenda
Mar 07, 2023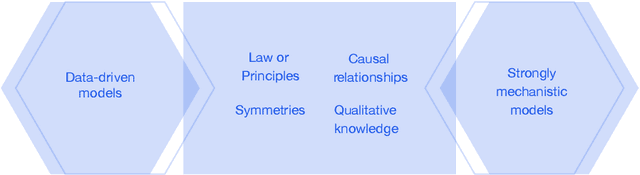
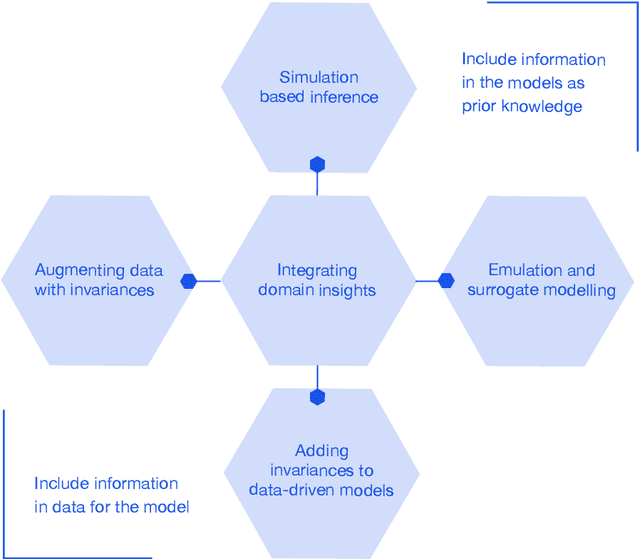
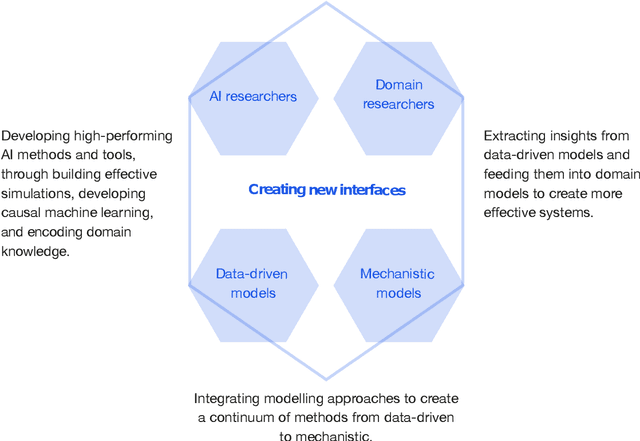
This report documents the programme and the outcomes of Dagstuhl Seminar 22382 "Machine Learning for Science: Bridging Data-Driven and Mechanistic Modelling". Today's scientific challenges are characterised by complexity. Interconnected natural, technological, and human systems are influenced by forces acting across time- and spatial-scales, resulting in complex interactions and emergent behaviours. Understanding these phenomena -- and leveraging scientific advances to deliver innovative solutions to improve society's health, wealth, and well-being -- requires new ways of analysing complex systems. The transformative potential of AI stems from its widespread applicability across disciplines, and will only be achieved through integration across research domains. AI for science is a rendezvous point. It brings together expertise from $\mathrm{AI}$ and application domains; combines modelling knowledge with engineering know-how; and relies on collaboration across disciplines and between humans and machines. Alongside technical advances, the next wave of progress in the field will come from building a community of machine learning researchers, domain experts, citizen scientists, and engineers working together to design and deploy effective AI tools. This report summarises the discussions from the seminar and provides a roadmap to suggest how different communities can collaborate to deliver a new wave of progress in AI and its application for scientific discovery.
A Review of and Roadmap for Data Science and Machine Learning for the Neuropsychiatric Phenotype of Autism
Mar 07, 2023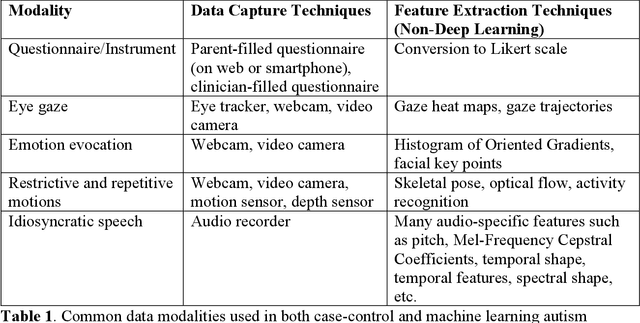
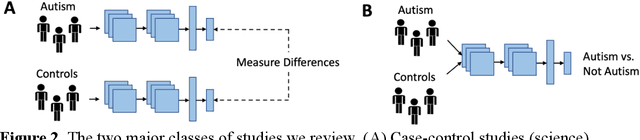
Autism Spectrum Disorder (autism) is a neurodevelopmental delay which affects at least 1 in 44 children. Like many neurological disorder phenotypes, the diagnostic features are observable, can be tracked over time, and can be managed or even eliminated through proper therapy and treatments. Yet, there are major bottlenecks in the diagnostic, therapeutic, and longitudinal tracking pipelines for autism and related delays, creating an opportunity for novel data science solutions to augment and transform existing workflows and provide access to services for more affected families. Several prior efforts conducted by a multitude of research labs have spawned great progress towards improved digital diagnostics and digital therapies for children with autism. We review the literature of digital health methods for autism behavior quantification using data science. We describe both case-control studies and classification systems for digital phenotyping. We then discuss digital diagnostics and therapeutics which integrate machine learning models of autism-related behaviors, including the factors which must be addressed for translational use. Finally, we describe ongoing challenges and potent opportunities for the field of autism data science. Given the heterogeneous nature of autism and the complexities of the relevant behaviors, this review contains insights which are relevant to neurological behavior analysis and digital psychiatry more broadly.