 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
IMU-based online multi-lidar calibration without lidar odometry
Feb 28, 2023
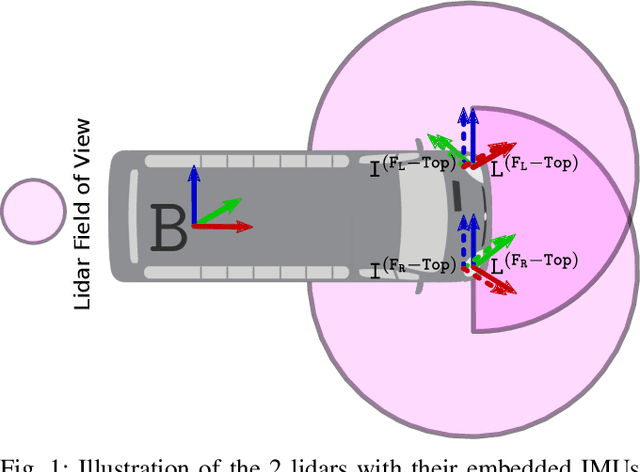
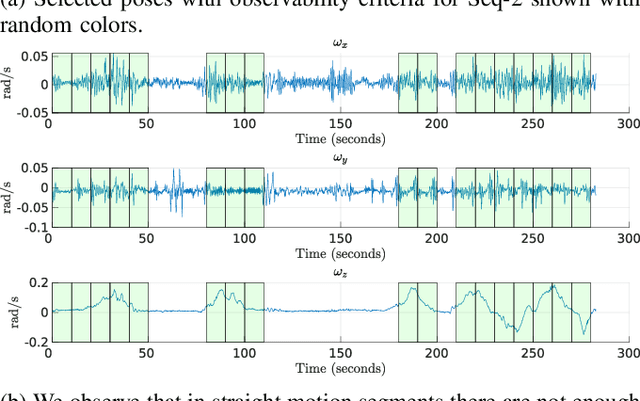

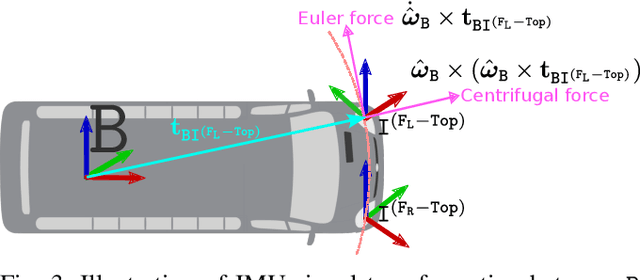
When deploying autonomous systems that require several sensors for perception, accurate and reliable extrinsic calibration is required. In this research, we offer a reliable technique that can extrinsically calibrate numerous lidars in the base frame of a moving vehicle without the use of odometry estimation or fiducial markers. Our method is based on comparing the raw IMU signals between a collocated IMU present with the lidar and the IMU measurements from the GNSS system in the vehicle base frame. Additionally, based on our observability criterion, we choose measurements that include the most mutual information rather than comparing all comparable IMU readings. This enables us to locate the measurements that are most useful for real-time calibration. Utilizing data gathered from Scania test vehicles with various sensor setups, we have successfully validated our methodology.
Graph Reinforcement Learning for Operator Selection in the ALNS Metaheuristic
Feb 28, 2023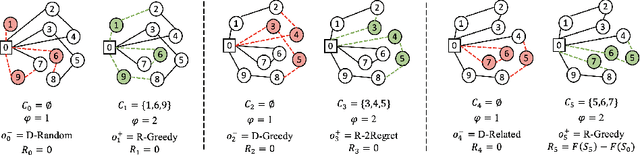
ALNS is a popular metaheuristic with renowned efficiency in solving combinatorial optimisation problems. However, despite 16 years of intensive research into ALNS, whether the embedded adaptive layer can efficiently select operators to improve the incumbent remains an open question. In this work, we formulate the choice of operators as a Markov Decision Process, and propose a practical approach based on Deep Reinforcement Learning and Graph Neural Networks. The results show that our proposed method achieves better performance than the classic ALNS adaptive layer due to the choice of operator being conditioned on the current solution. We also discuss important considerations such as the size of the operator portfolio and the impact of the choice of operator scales. Notably, our approach can also save significant time and labour costs for handcrafting problem-specific operator portfolios.
No-regret Algorithms for Fair Resource Allocation
Mar 11, 2023
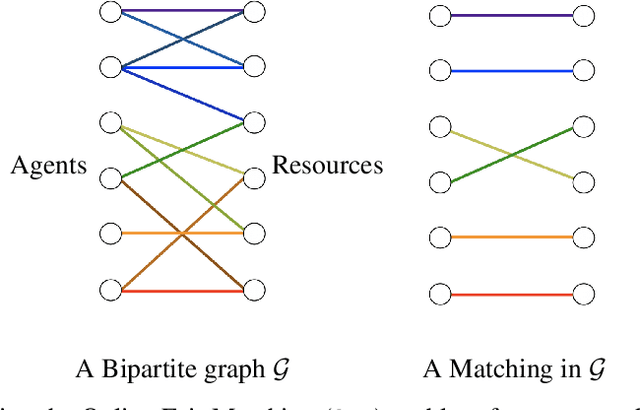
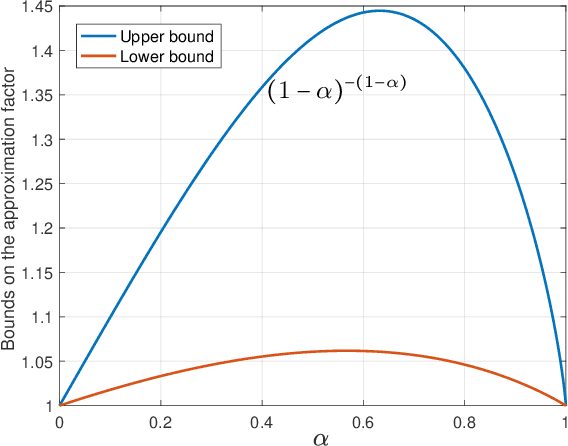
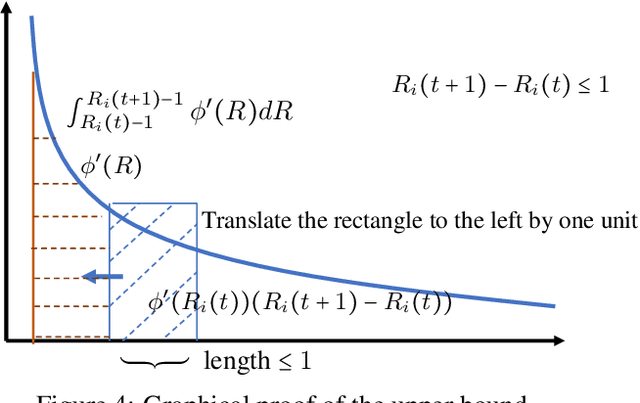
We consider a fair resource allocation problem in the no-regret setting against an unrestricted adversary. The objective is to allocate resources equitably among several agents in an online fashion so that the difference of the aggregate $\alpha$-fair utilities of the agents between an optimal static clairvoyant allocation and that of the online policy grows sub-linearly with time. The problem is challenging due to the non-additive nature of the $\alpha$-fairness function. Previously, it was shown that no online policy can exist for this problem with a sublinear standard regret. In this paper, we propose an efficient online resource allocation policy, called Online Proportional Fair (OPF), that achieves $c_\alpha$-approximate sublinear regret with the approximation factor $c_\alpha=(1-\alpha)^{-(1-\alpha)}\leq 1.445,$ for $0\leq \alpha < 1$. The upper bound to the $c_\alpha$-regret for this problem exhibits a surprising phase transition phenomenon. The regret bound changes from a power-law to a constant at the critical exponent $\alpha=\frac{1}{2}.$ As a corollary, our result also resolves an open problem raised by Even-Dar et al. [2009] on designing an efficient no-regret policy for the online job scheduling problem in certain parameter regimes. The proof of our results introduces new algorithmic and analytical techniques, including greedy estimation of the future gradients for non-additive global reward functions and bootstrapping adaptive regret bounds, which may be of independent interest.
Auxiliary MCMC and particle Gibbs samplers for parallelisable inference in latent dynamical systems
Mar 01, 2023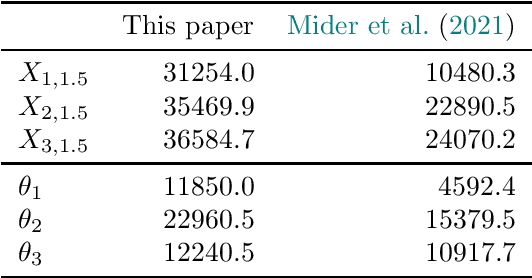
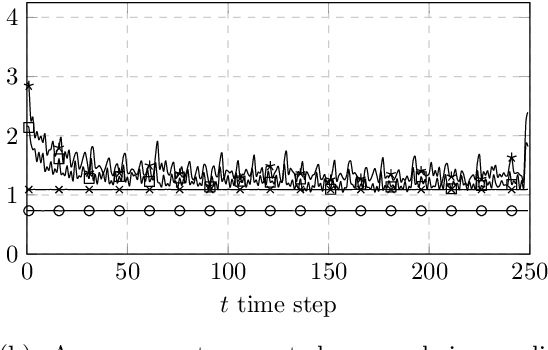
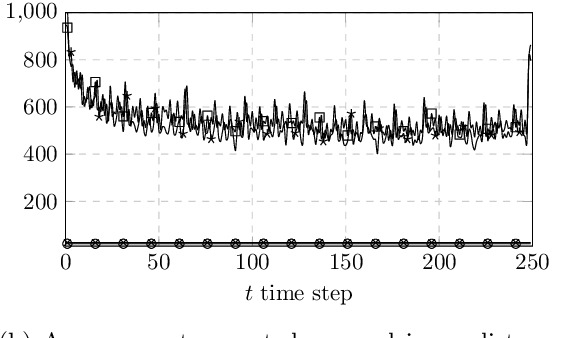
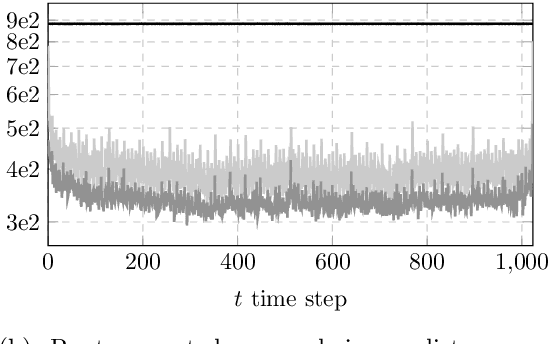
We introduce two new classes of exact Markov chain Monte Carlo (MCMC) samplers for inference in latent dynamical models. The first one, which we coin auxiliary Kalman samplers, relies on finding a linear Gaussian state-space model approximation around the running trajectory corresponding to the state of the Markov chain. The second, that we name auxiliary particle Gibbs samplers corresponds to deriving good local proposals in an auxiliary Feynman--Kac model for use in particle Gibbs. Both samplers are controlled by augmenting the target distribution with auxiliary observations, resulting in an efficient Gibbs sampling routine. We discuss the relative statistical and computational performance of the samplers introduced, and show how to parallelise the auxiliary samplers along the time dimension. We illustrate the respective benefits and drawbacks of the resulting algorithms on classical examples from the particle filtering literature.
Few-shots Portrait Generation with Style Enhancement and Identity Preservation
Mar 01, 2023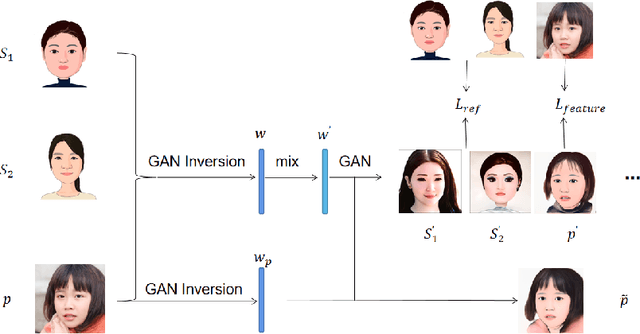

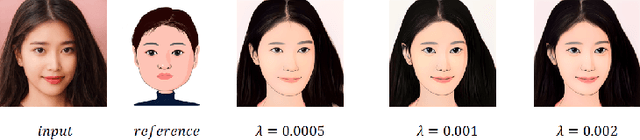
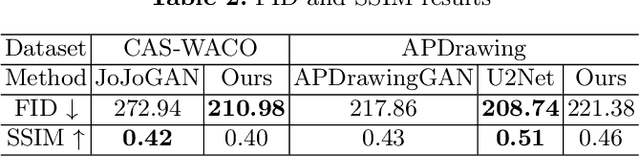
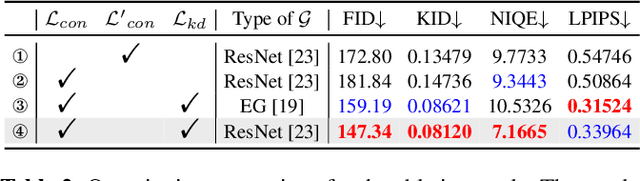
Nowadays, the wide application of virtual digital human promotes the comprehensive prosperity and development of digital culture supported by digital economy. The personalized portrait automatically generated by AI technology needs both the natural artistic style and human sentiment. In this paper, we propose a novel StyleIdentityGAN model, which can ensure the identity and artistry of the generated portrait at the same time. Specifically, the style-enhanced module focuses on artistic style features decoupling and transferring to improve the artistry of generated virtual face images. Meanwhile, the identity-enhanced module preserves the significant features extracted from the input photo. Furthermore, the proposed method requires a small number of reference style data. Experiments demonstrate the superiority of StyleIdentityGAN over state-of-art methods in artistry and identity effects, with comparisons done qualitatively, quantitatively and through a perceptual user study. Code has been released on Github3.
One-class Damage Detector Using Fully-Convolutional Data Description for Prognostics
Mar 03, 2023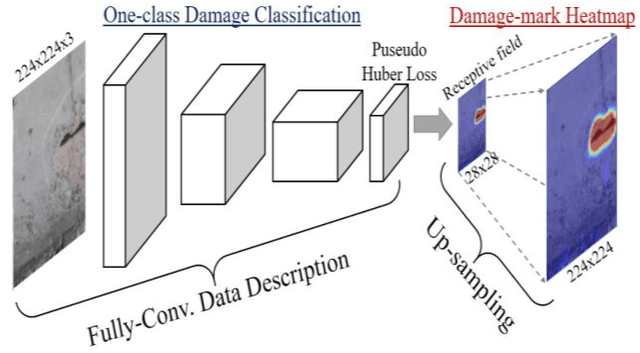
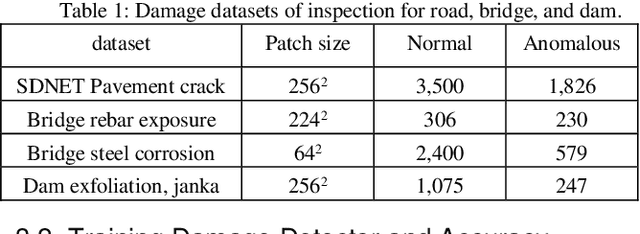
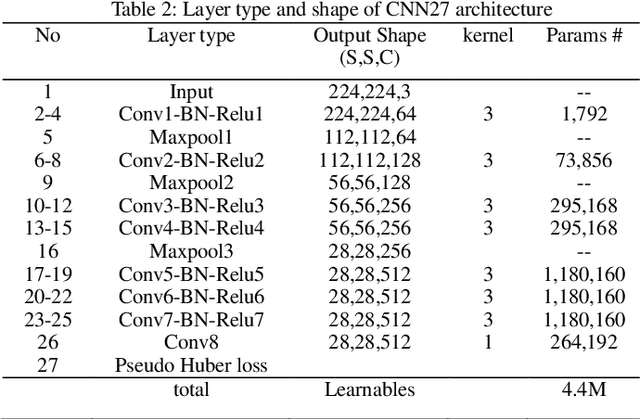
It is important for infrastructure managers to maintain a high standard to ensure user satisfaction during a lifecycle of infrastructures. Surveillance cameras and visual inspections have enabled progress toward automating the detection of anomalous features and assessing the occurrence of the deterioration. Frequently, collecting damage data constraints time consuming and repeated inspections. One-class damage detection approach has a merit that only the normal images enables us to optimize the parameters. Simultaneously, the visual explanation using the heat map enable us to understand the localized anomalous feature. We propose a civil-purpose application to automate one-class damage detection using the fully-convolutional data description (FCDD). We also visualize the explanation of the damage feature using the up-sampling-based activation map with the Gaussian up-sampling from the receptive field of the fully convolutional network (FCN). We demonstrate it in experimental studies: concrete damage and steel corrosion and mention its usefulness and future works.
Stealthy Perception-based Attacks on Unmanned Aerial Vehicles
Mar 03, 2023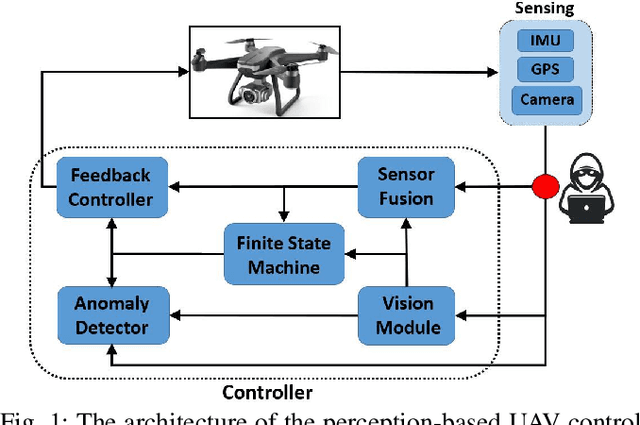
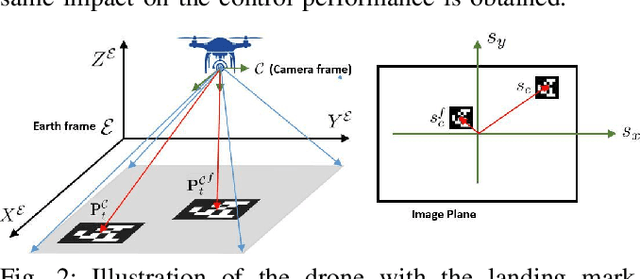
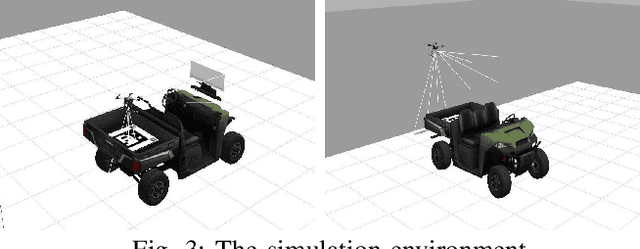
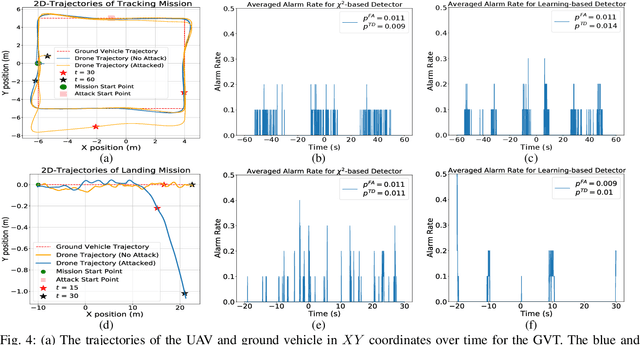
In this work, we study vulnerability of unmanned aerial vehicles (UAVs) to stealthy attacks on perception-based control. To guide our analysis, we consider two specific missions: ($i$) ground vehicle tracking (GVT), and ($ii$) vertical take-off and landing (VTOL) of a quadcopter on a moving ground vehicle. Specifically, we introduce a method to consistently attack both the sensors measurements and camera images over time, in order to cause control performance degradation (e.g., by failing the mission) while remaining stealthy (i.e., undetected by the deployed anomaly detector). Unlike existing attacks that mainly rely on vulnerability of deep neural networks to small input perturbations (e.g., by adding small patches and/or noise to the images), we show that stealthy yet effective attacks can be designed by changing images of the ground vehicle's landing markers as well as suitably falsifying sensing data. We illustrate the effectiveness of our attacks in Gazebo 3D robotics simulator.
Online simulator-based experimental design for cognitive model selection
Mar 03, 2023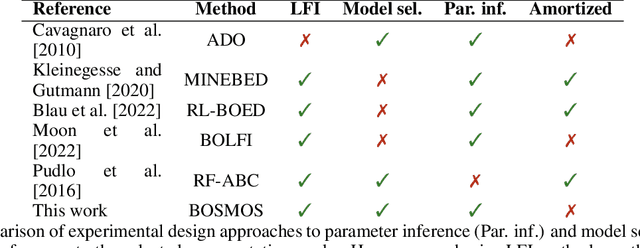
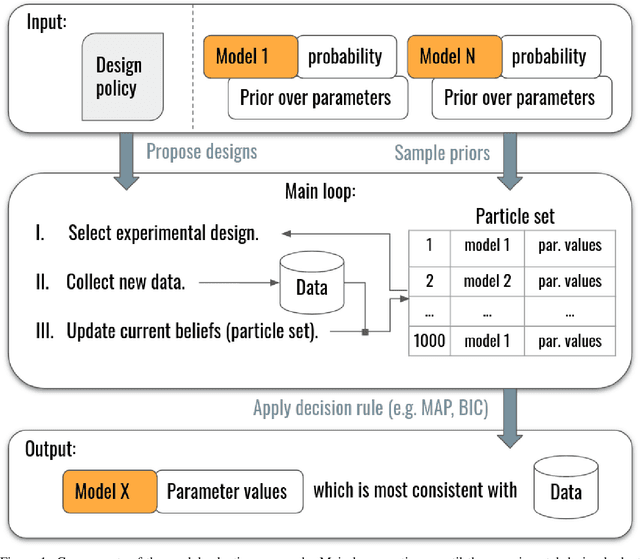
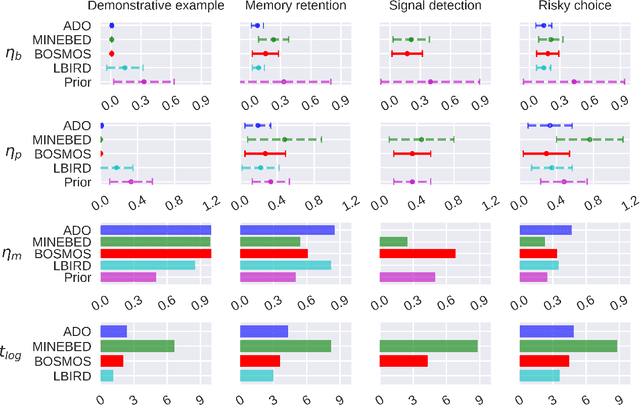
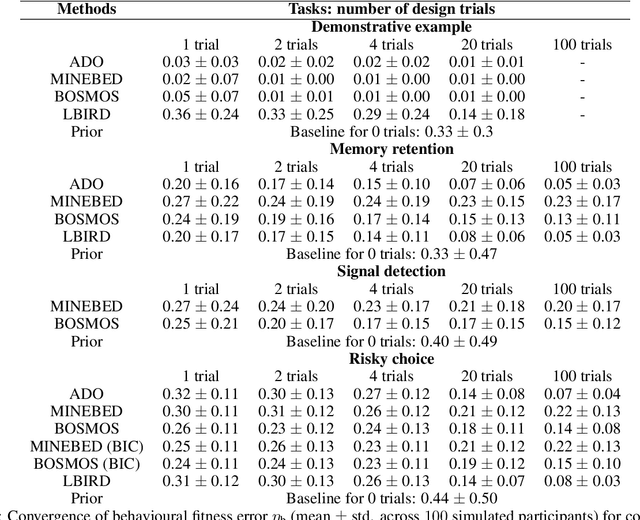
The problem of model selection with a limited number of experimental trials has received considerable attention in cognitive science, where the role of experiments is to discriminate between theories expressed as computational models. Research on this subject has mostly been restricted to optimal experiment design with analytically tractable models. However, cognitive models of increasing complexity, with intractable likelihoods, are becoming more commonplace. In this paper, we propose BOSMOS: an approach to experimental design that can select between computational models without tractable likelihoods. It does so in a data-efficient manner, by sequentially and adaptively generating informative experiments. In contrast to previous approaches, we introduce a novel simulator-based utility objective for design selection, and a new approximation of the model likelihood for model selection. In simulated experiments, we demonstrate that the proposed BOSMOS technique can accurately select models in up to 2 orders of magnitude less time than existing LFI alternatives for three cognitive science tasks: memory retention, sequential signal detection and risky choice.
Intelligent O-RAN Traffic Steering for URLLC Through Deep Reinforcement Learning
Mar 03, 2023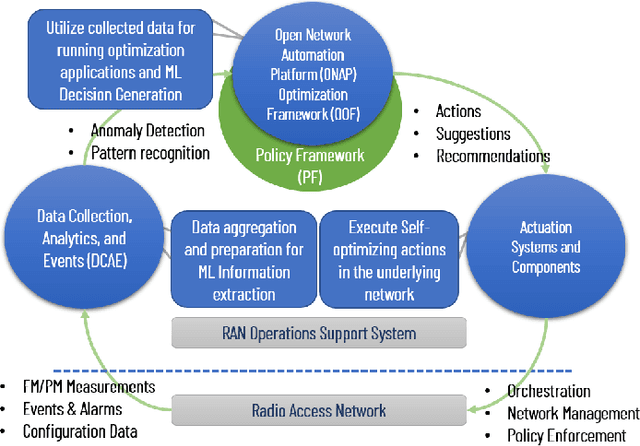
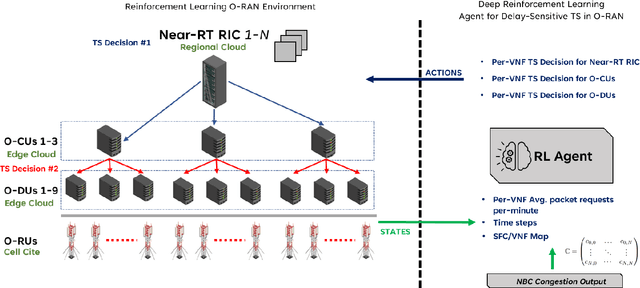
The goal of Next-Generation Networks is to improve upon the current networking paradigm, especially in providing higher data rates, near-real-time latencies, and near-perfect quality of service. However, existing radio access network (RAN) architectures lack sufficient flexibility and intelligence to meet those demands. Open RAN (O-RAN) is a promising paradigm for building a virtualized and intelligent RAN architecture. This paper presents a Machine Learning (ML)-based Traffic Steering (TS) scheme to predict network congestion and then proactively steer O-RAN traffic to avoid it and reduce the expected queuing delay. To achieve this, we propose an optimized setup focusing on safeguarding both latency and reliability to serve URLLC applications. The proposed solution consists of a two-tiered ML strategy based on Naive Bayes Classifier and deep Q-learning. Our solution is evaluated against traditional reactive TS approaches that are offered as xApps in O-RAN and shows an average of 15.81 percent decrease in queuing delay across all deployed SFCs.
Unsupervised Deep Digital Staining For Microscopic Cell Images Via Knowledge Distillation
Mar 03, 2023
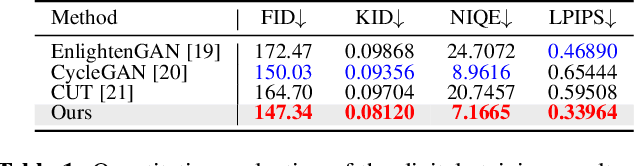
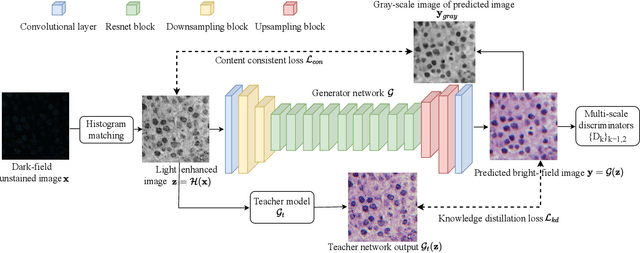
Staining is critical to cell imaging and medical diagnosis, which is expensive, time-consuming, labor-intensive, and causes irreversible changes to cell tissues. Recent advances in deep learning enabled digital staining via supervised model training. However, it is difficult to obtain large-scale stained/unstained cell image pairs in practice, which need to be perfectly aligned with the supervision. In this work, we propose a novel unsupervised deep learning framework for the digital staining of cell images using knowledge distillation and generative adversarial networks (GANs). A teacher model is first trained mainly for the colorization of bright-field images. After that,a student GAN for staining is obtained by knowledge distillation with hybrid non-reference losses. We show that the proposed unsupervised deep staining method can generate stained images with more accurate positions and shapes of the cell targets. Compared with other unsupervised deep generative models for staining, our method achieves much more promising results both qualitatively and quantitatively.