 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
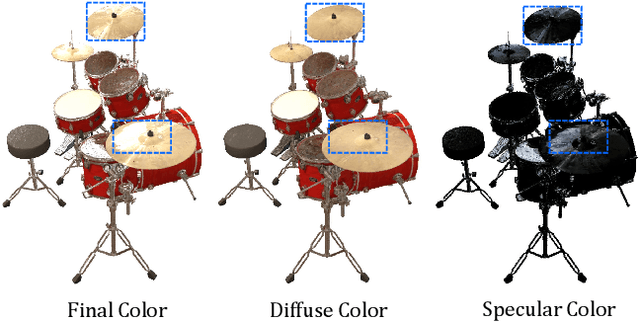
Set Features for Fine-grained Anomaly Detection
Mar 02, 2023
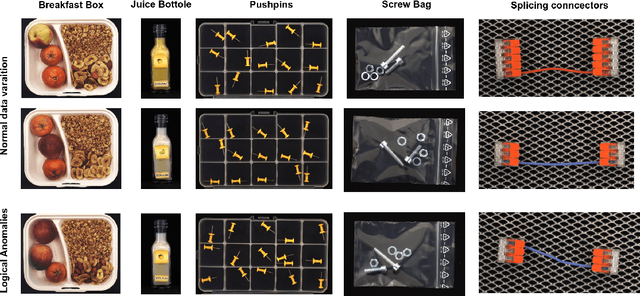
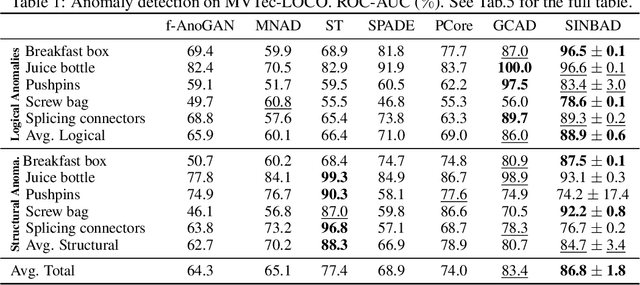
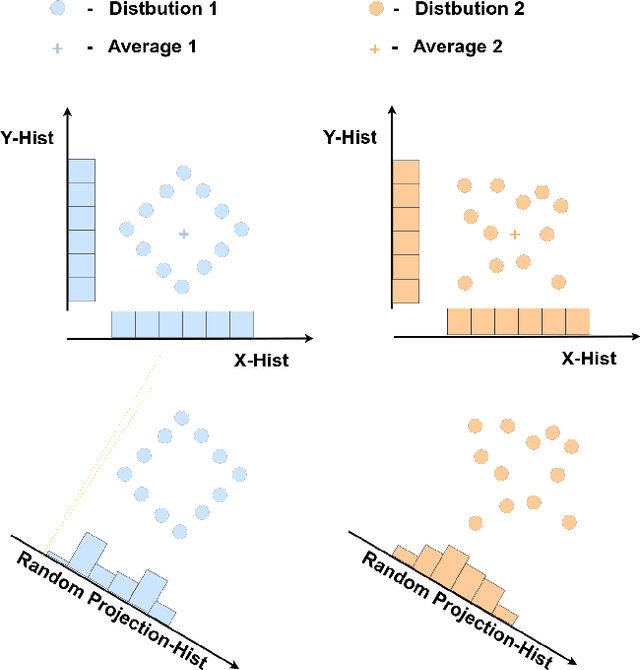
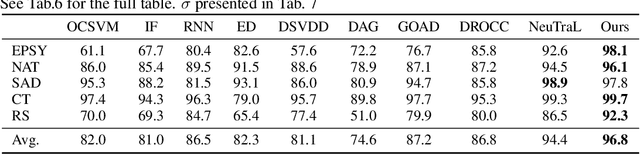
Fine-grained anomaly detection has recently been dominated by segmentation based approaches. These approaches first classify each element of the sample (e.g., image patch) as normal or anomalous and then classify the entire sample as anomalous if it contains anomalous elements. However, such approaches do not extend to scenarios where the anomalies are expressed by an unusual combination of normal elements. In this paper, we overcome this limitation by proposing set features that model each sample by the distribution its elements. We compute the anomaly score of each sample using a simple density estimation method. Our simple-to-implement approach outperforms the state-of-the-art in image-level logical anomaly detection (+3.4%) and sequence-level time-series anomaly detection (+2.4%).
GeoLCR: Attention-based Geometric Loop Closure and Registration
Mar 02, 2023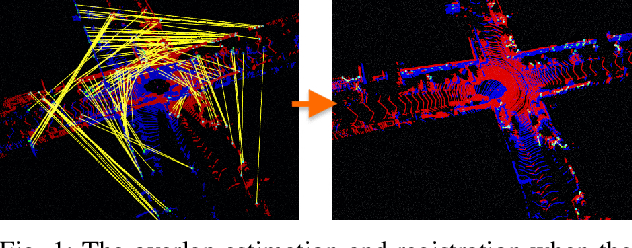
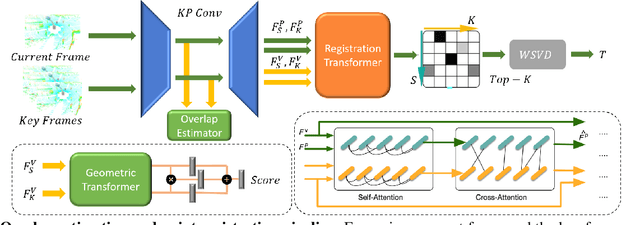
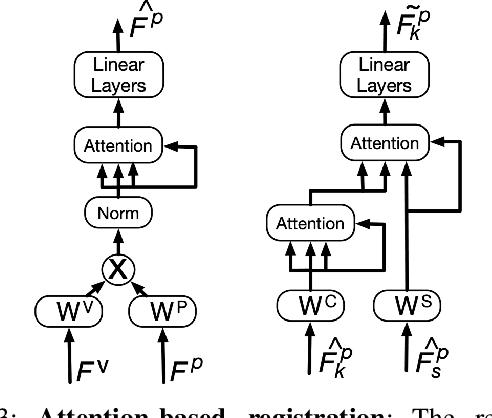
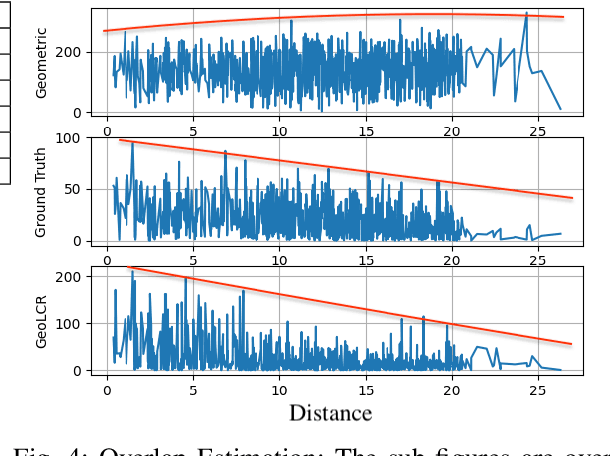
We present a novel algorithm for learning-based loop-closure for SLAM (simultaneous localization and mapping) applications. Our approach is designed for general 3D point cloud data, including those from lidar, and is used to prevent accumulated drift over time for autonomous driving. We voxelize the point clouds into coarse voxels and calculate the overlap to estimate if the vehicle drives in a loop. We perform point-level registration to compute the current pose accurately. We have evaluated our approach on well-known datasets KITTI, KITTI-360, Nuscenes, Complex Urban, NCLT, and MulRan. We show at most 2 times improvement in accuracy estimation of translation and rotation. On some challenging sequences, our method is the first approach that can obtain a 100% success rate.
Transformer-based Models for Long-Form Document Matching: Challenges and Empirical Analysis
Feb 07, 2023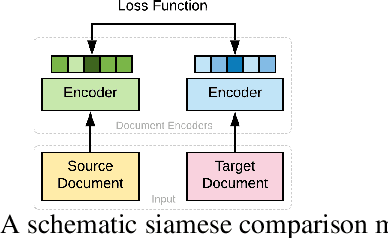
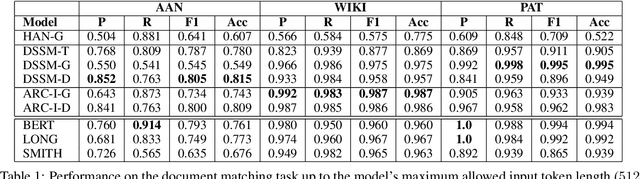
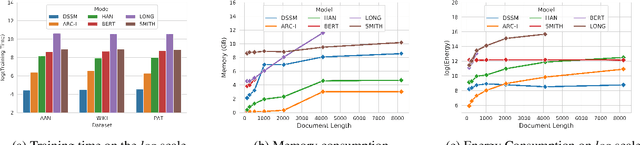

Recent advances in the area of long document matching have primarily focused on using transformer-based models for long document encoding and matching. There are two primary challenges associated with these models. Firstly, the performance gain provided by transformer-based models comes at a steep cost - both in terms of the required training time and the resource (memory and energy) consumption. The second major limitation is their inability to handle more than a pre-defined input token length at a time. In this work, we empirically demonstrate the effectiveness of simple neural models (such as feed-forward networks, and CNNs) and simple embeddings (like GloVe, and Paragraph Vector) over transformer-based models on the task of document matching. We show that simple models outperform the more complex BERT-based models while taking significantly less training time, energy, and memory. The simple models are also more robust to variations in document length and text perturbations.
MIBINET: Real-time Proctoring of Cardiovascular Inter-Beat-Intervals using a Multifaceted CNN from mm-Wave Ballistocardiography Signal
Nov 14, 2022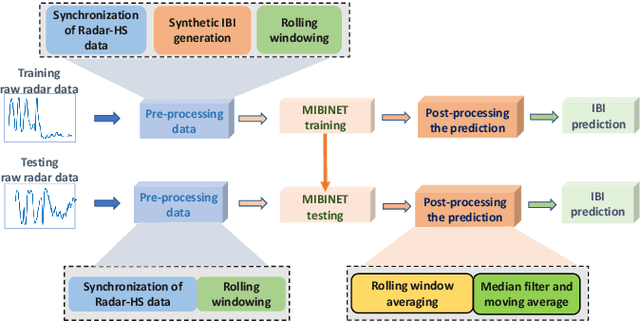
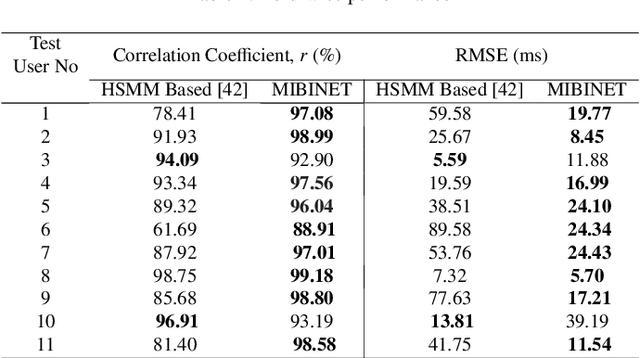
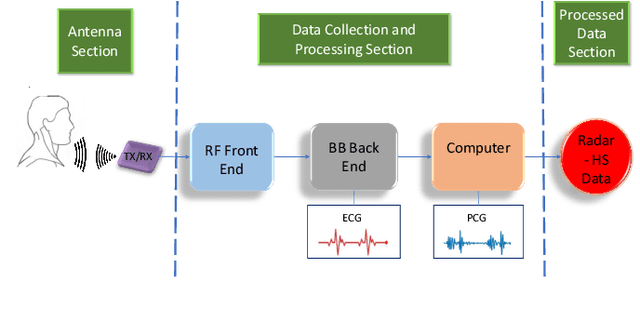
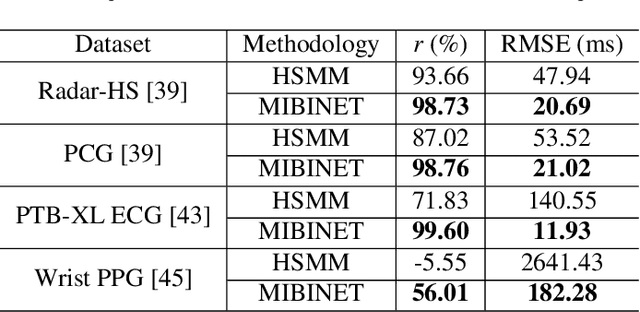
The recent pandemic has refocused the medical world's attention on the diagnostic techniques associated with cardiovascular disease. Heart rate provides a real-time snapshot of cardiovascular health. A more precise heart rate reading provides a better understanding of cardiac muscle activity. Although many existing diagnostic techniques are approaching the limits of perfection, there remains potential for further development. In this paper, we propose MIBINET, a convolutional neural network for real-time proctoring of heart rate via inter-beat-interval (IBI) from millimeter wave (mm-wave) radar ballistocardiography signals. This network can be used in hospitals, homes, and passenger vehicles due to its lightweight and contactless properties. It employs classical signal processing prior to fitting the data into the network. Although MIBINET is primarily designed to work on mm-wave signals, it is found equally effective on signals of various modalities such as PCG, ECG, and PPG. Extensive experimental results and a thorough comparison with the current state-of-the-art on mm-wave signals demonstrate the viability and versatility of the proposed methodology. Keywords: Cardiovascular disease, contactless measurement, heart rate, IBI, mm-wave radar, neural network
MetaMorph: Learning Metamorphic Image Transformation With Appearance Changes
Mar 08, 2023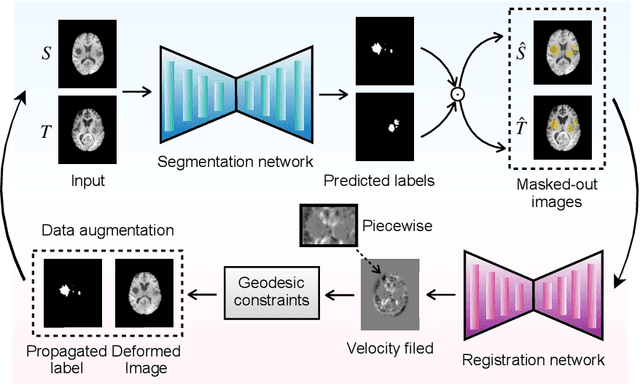
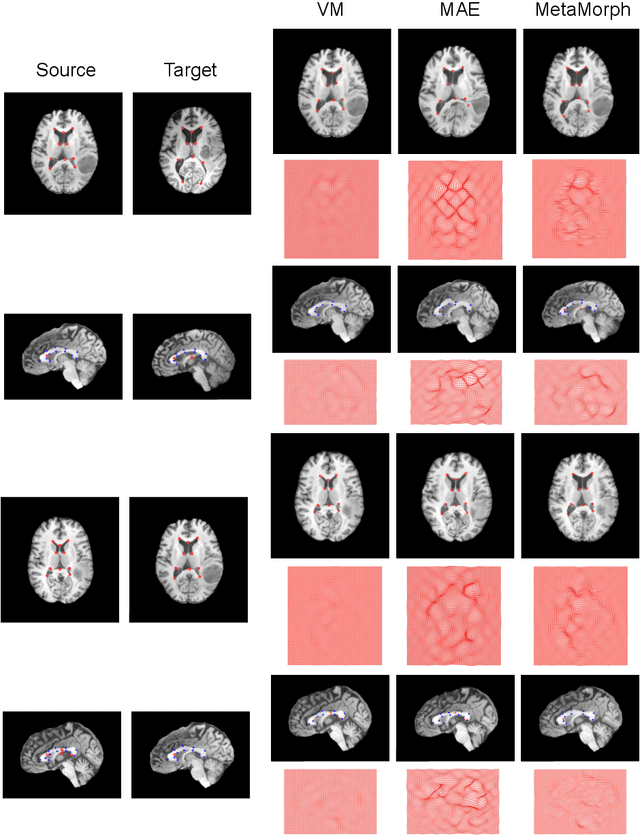
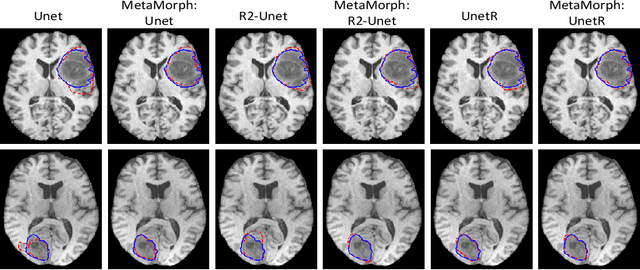
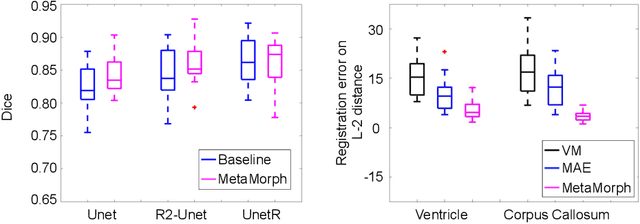
This paper presents a novel predictive model, MetaMorph, for metamorphic registration of images with appearance changes (i.e., caused by brain tumors). In contrast to previous learning-based registration methods that have little or no control over appearance-changes, our model introduces a new regularization that can effectively suppress the negative effects of appearance changing areas. In particular, we develop a piecewise regularization on the tangent space of diffeomorphic transformations (also known as initial velocity fields) via learned segmentation maps of abnormal regions. The geometric transformation and appearance changes are treated as joint tasks that are mutually beneficial. Our model MetaMorph is more robust and accurate when searching for an optimal registration solution under the guidance of segmentation, which in turn improves the segmentation performance by providing appropriately augmented training labels. We validate MetaMorph on real 3D human brain tumor magnetic resonance imaging (MRI) scans. Experimental results show that our model outperforms the state-of-the-art learning-based registration models. The proposed MetaMorph has great potential in various image-guided clinical interventions, e.g., real-time image-guided navigation systems for tumor removal surgery.
nl2spec: Interactively Translating Unstructured Natural Language to Temporal Logics with Large Language Models
Mar 08, 2023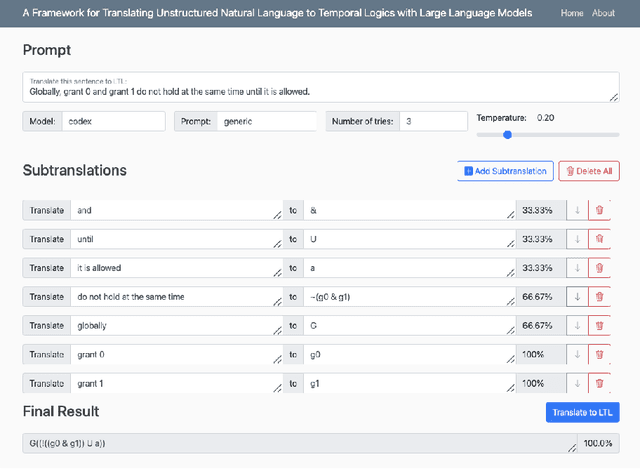

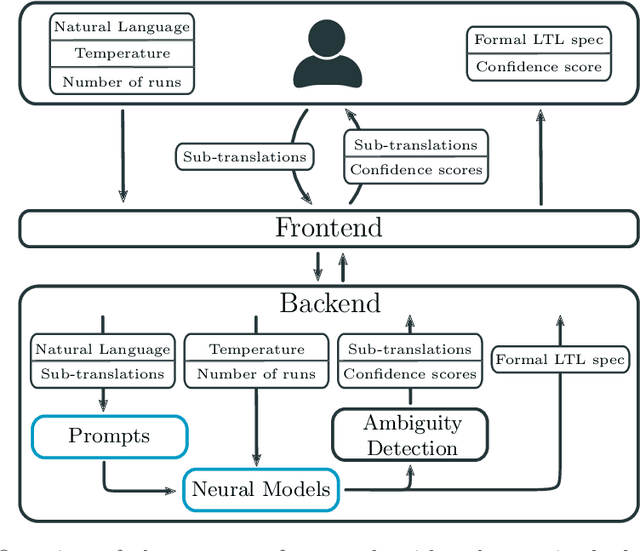
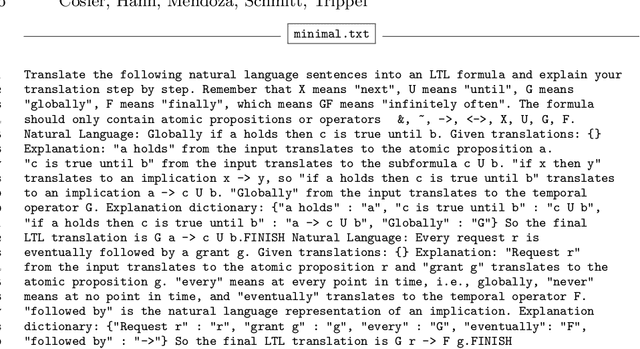
A rigorous formalization of desired system requirements is indispensable when performing any verification task. This often limits the application of verification techniques, as writing formal specifications is an error-prone and time-consuming manual task. To facilitate this, we present nl2spec, a framework for applying Large Language Models (LLMs) to derive formal specifications (in temporal logics) from unstructured natural language. In particular, we introduce a new methodology to detect and resolve the inherent ambiguity of system requirements in natural language: we utilize LLMs to map subformulas of the formalization back to the corresponding natural language fragments of the input. Users iteratively add, delete, and edit these sub-translations to amend erroneous formalizations, which is easier than manually redrafting the entire formalization. The framework is agnostic to specific application domains and can be extended to similar specification languages and new neural models. We perform a user study to obtain a challenging dataset, which we use to run experiments on the quality of translations. We provide an open-source implementation, including a web-based frontend.
Breaking Symmetries Leads to Diverse Quadrupedal Gaits
Mar 08, 2023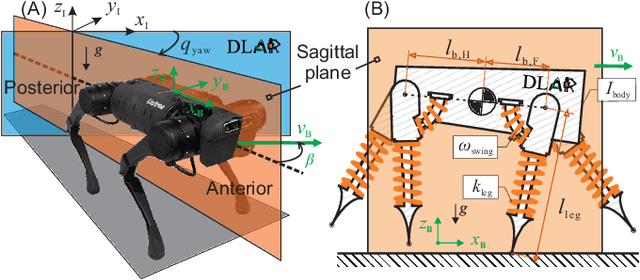
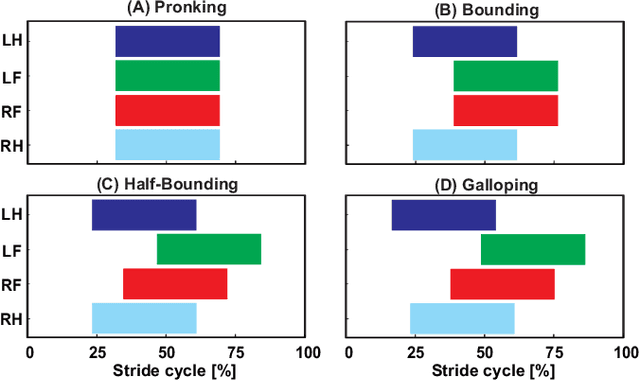
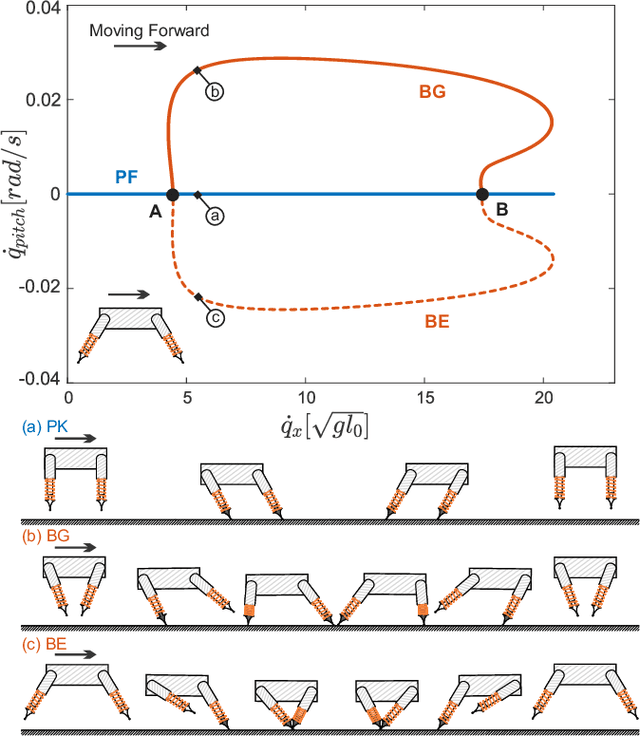
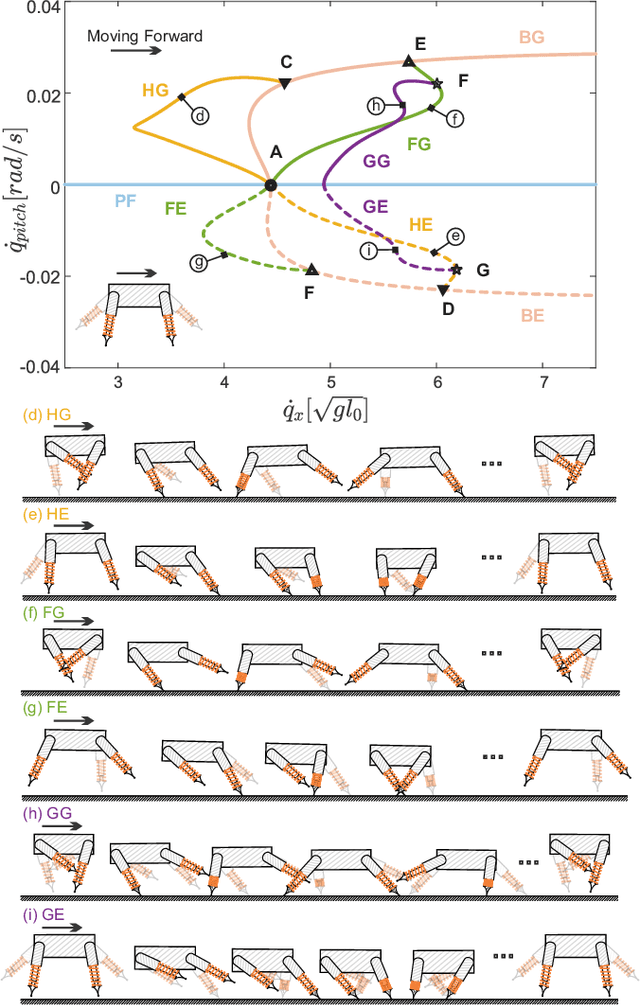
Symmetry manifests itself in legged locomotion in a variety of ways. No matter where a legged system begins to move periodically, the torso and limbs coordinate with each other's movements in a similar manner. Also, in many gaits observed in nature, the legs on both sides of the torso move in exactly the same way, sometimes they are just half a period out of phase. Furthermore, when some animals move forward and backward, their movements are strikingly similar as if the time had been reversed. This work aims to generalize these phenomena and propose formal definitions of symmetries in legged locomotion using group theory terminology. Symmetries in some common quadrupedal gaits such as pronking, bounding, half-bounding, and galloping have been discussed. Moreover, a spring-mass model has been used to demonstrate how breaking symmetries can alter gaits in a legged system. Studying the symmetries may provide insight into which gaits may be suitable for a particular robotic design, or may enable roboticists to design more agile and efficient robot controllers by using certain gaits.
Unbiased Learning to Rank with Biased Continuous Feedback
Mar 08, 2023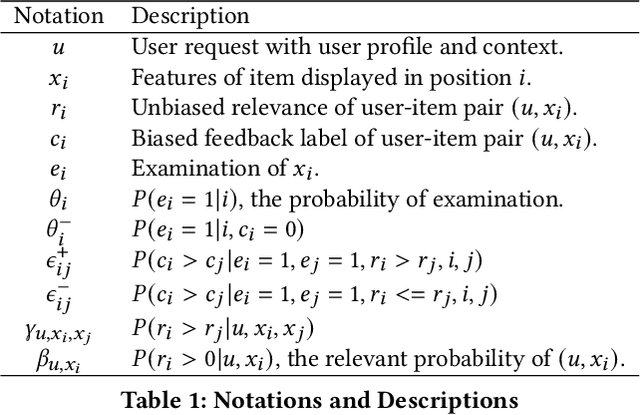
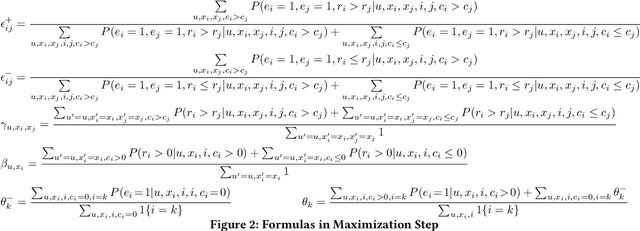
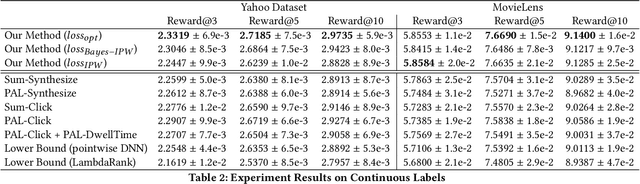
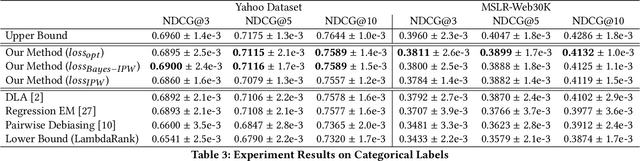
It is a well-known challenge to learn an unbiased ranker with biased feedback. Unbiased learning-to-rank(LTR) algorithms, which are verified to model the relative relevance accurately based on noisy feedback, are appealing candidates and have already been applied in many applications with single categorical labels, such as user click signals. Nevertheless, the existing unbiased LTR methods cannot properly handle continuous feedback, which are essential for many industrial applications, such as content recommender systems. To provide personalized high-quality recommendation results, recommender systems need model both categorical and continuous biased feedback, such as click and dwell time. Accordingly, we design a novel unbiased LTR algorithm to tackle the challenges, which innovatively models position bias in the pairwise fashion and introduces the pairwise trust bias to separate the position bias, trust bias, and user relevance explicitly and can work for both continuous and categorical feedback. Experiment results on public benchmark datasets and internal live traffic of a large-scale recommender system at Tencent News show superior results for continuous labels and also competitive performance for categorical labels of the proposed method.
* 10 pages. arXiv admin note: substantial text overlap with arXiv:2111.12929
Delicate Textured Mesh Recovery from NeRF via Adaptive Surface Refinement
Mar 03, 2023
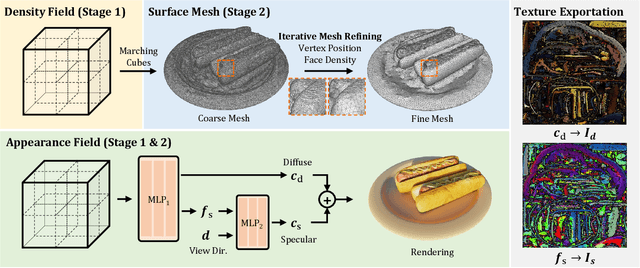
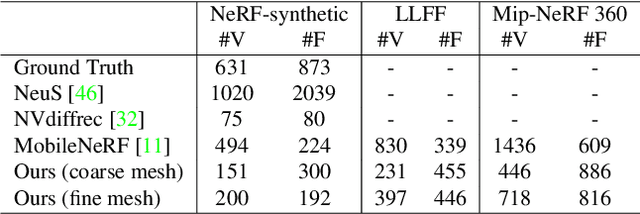
Neural Radiance Fields (NeRF) have constituted a remarkable breakthrough in image-based 3D reconstruction. However, their implicit volumetric representations differ significantly from the widely-adopted polygonal meshes and lack support from common 3D software and hardware, making their rendering and manipulation inefficient. To overcome this limitation, we present a novel framework that generates textured surface meshes from images. Our approach begins by efficiently initializing the geometry and view-dependency decomposed appearance with a NeRF. Subsequently, a coarse mesh is extracted, and an iterative surface refining algorithm is developed to adaptively adjust both vertex positions and face density based on re-projected rendering errors. We jointly refine the appearance with geometry and bake it into texture images for real-time rendering. Extensive experiments demonstrate that our method achieves superior mesh quality and competitive rendering quality.
Understanding Shared Control for Assistive Robotic Arms
Mar 03, 2023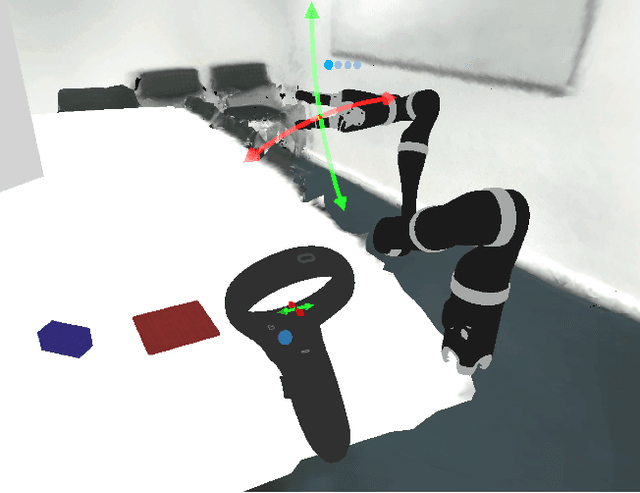
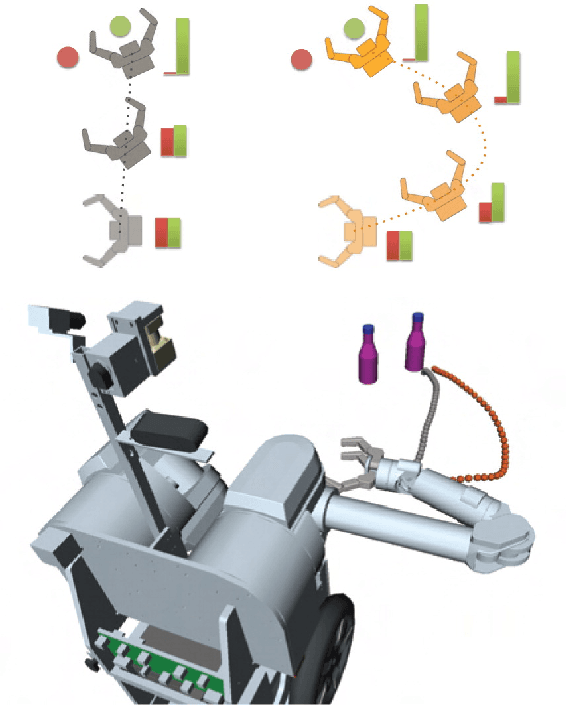
Living a self-determined life independent of human caregivers or fully autonomous robots is a crucial factor for human dignity and the preservation of self-worth for people with motor impairments. Assistive robotic solutions - particularly robotic arms - are frequently deployed in domestic care, empowering people with motor impairments in performing ADLs independently. However, while assistive robotic arms can help them perform ADLs, currently available controls are highly complex and time-consuming due to the need to control multiple DoFs at once and necessary mode-switches. This work provides an overview of shared control approaches for assistive robotic arms, which aim to improve their ease of use for people with motor impairments. We identify three main takeaways for future research: Less is More, Pick-and-Place Matters, and Communicating Intent.