 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Machine Learning for Flow Cytometry Data Analysis
Mar 16, 2023
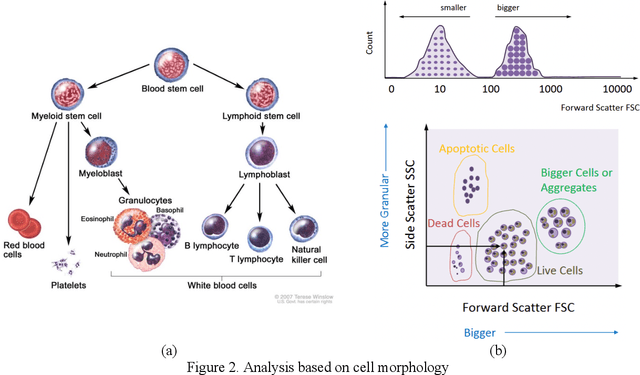
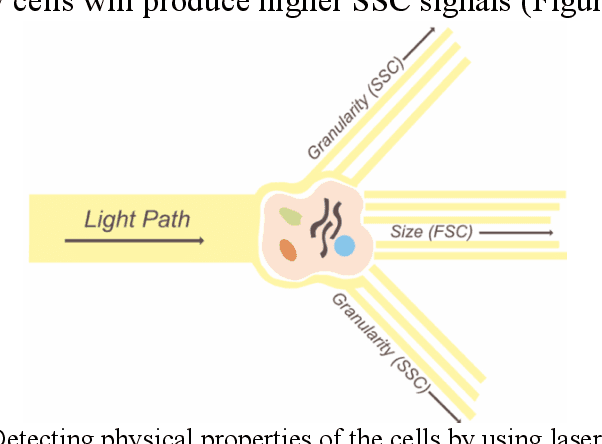
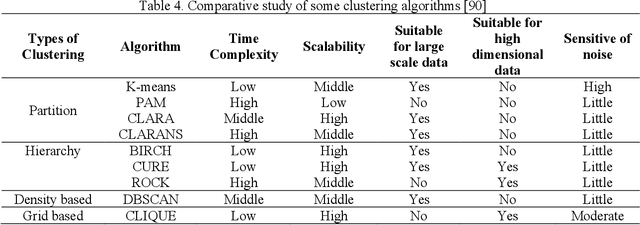
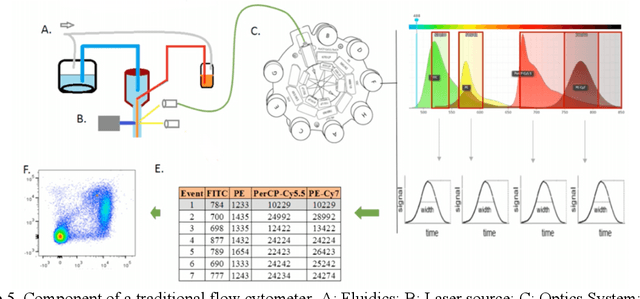
Flow cytometry mainly used for detecting the characteristics of a number of biochemical substances based on the expression of specific markers in cells. It is particularly useful for detecting membrane surface receptors, antigens, ions, or during DNA/RNA expression. Not only can it be employed as a biomedical research tool for recognising distinctive types of cells in mixed populations, but it can also be used as a diagnostic tool for classifying abnormal cell populations connected with disease. Modern flow cytometers can rapidly analyse tens of thousands of cells at the same time while also measuring multiple parameters from a single cell. However, the rapid development of flow cytometers makes it challenging for conventional analysis methods to interpret flow cytometry data. Researchers need to be able to distinguish interesting-looking cell populations manually in multi-dimensional data collected from millions of cells. Thus, it is essential to find a robust approach for analysing flow cytometry data automatically, specifically in identifying cell populations automatically. This thesis mainly concerns discover the potential shortcoming of current automated-gating algorithms in both real datasets and synthetic datasets. Three representative automated clustering algorithms are selected to be applied, compared and evaluated by completely and partially automated gating. A subspace clustering ProClus also implemented in this thesis. The performance of ProClus in flow cytometry is not well, but it is still a useful algorithm to detect noise.
Lon-eå at SemEval-2023 Task 11: A Comparison of\\Activation Functions for Soft and Hard Label Prediction
Mar 04, 2023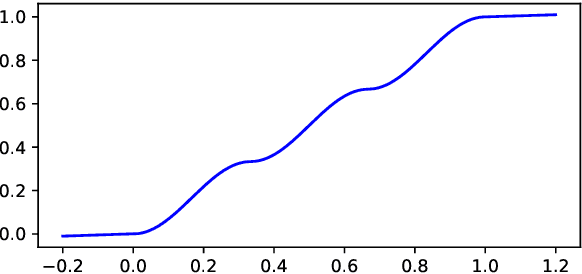
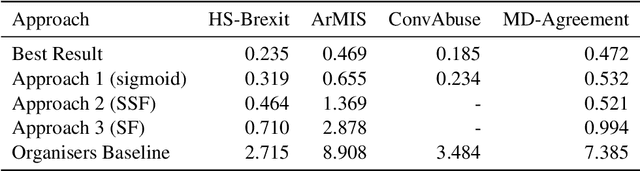
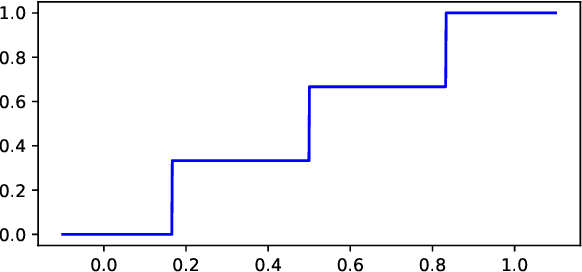
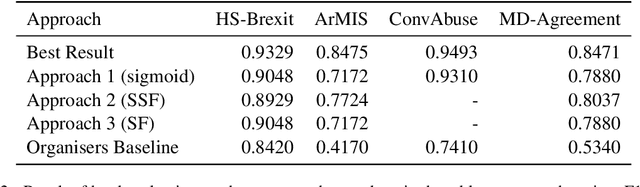
We study the influence of different activation functions in the output layer of deep neural network models for soft and hard label prediction in the learning with disagreement task. In this task, the goal is to quantify the amount of disagreement via predicting soft labels. To predict the soft labels, we use BERT-based preprocessors and encoders and vary the activation function used in the output layer, while keeping other parameters constant. The soft labels are then used for the hard label prediction. The activation functions considered are sigmoid as well as a step-function that is added to the model post-training and a sinusoidal activation function, which is introduced for the first time in this paper.
A copula-based boosting model for time-to-event prediction with dependent censoring
Oct 10, 2022
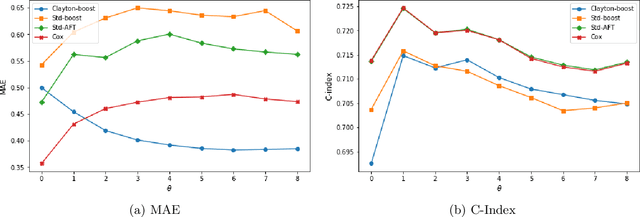
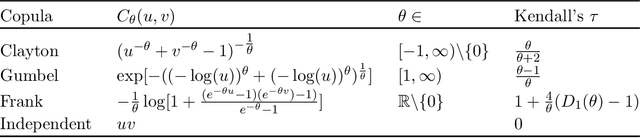
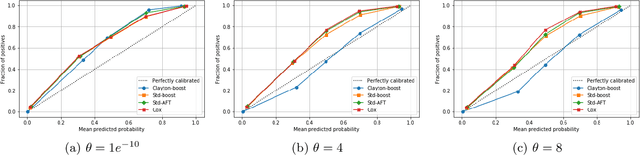
A characteristic feature of time-to-event data analysis is possible censoring of the event time. Most of the statistical learning methods for handling censored data are limited by the assumption of independent censoring, even if this can lead to biased predictions when the assumption does not hold. This paper introduces Clayton-boost, a boosting approach built upon the accelerated failure time model, which uses a Clayton copula to handle the dependency between the event and censoring distributions. By taking advantage of a copula, the independent censoring assumption is not needed any more. During comparisons with commonly used methods, Clayton-boost shows a strong ability to remove prediction bias at the presence of dependent censoring and outperforms the comparing methods either if the dependency strength or percentage censoring are considerable. The encouraging performance of Clayton-boost shows that there is indeed reasons to be critical about the independent censoring assumption, and that real-world data could highly benefit from modelling the potential dependency.
Active Learning of Discrete-Time Dynamics for Uncertainty-Aware Model Predictive Control
Oct 23, 2022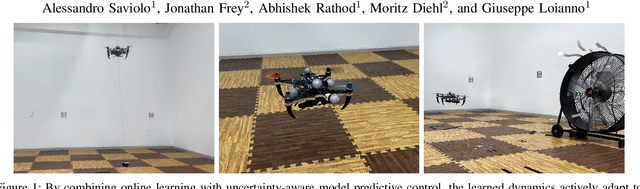
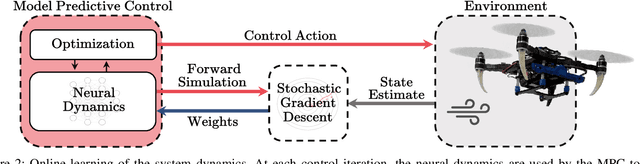
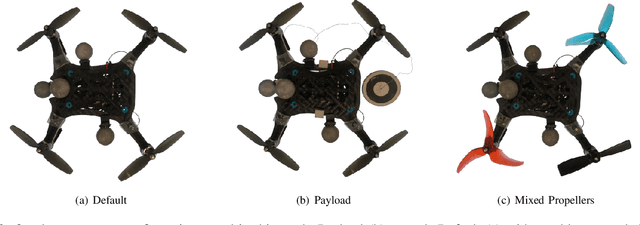
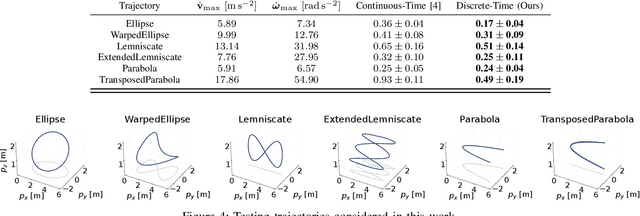
Model-based control requires an accurate model of the system dynamics for precisely and safely controlling the robot in complex and dynamic environments. Moreover, in presence of variations in the operating conditions, the model should be continuously refined to compensate for dynamics changes. In this paper, we propose a self-supervised learning approach to actively model robot discrete-time dynamics. We combine offline learning from past experience and online learning from present robot interaction with the unknown environment. These two ingredients enable highly sample-efficient and adaptive learning for accurate inference of the model dynamics in real-time even in operating regimes significantly different from the training distribution. Moreover, we design an uncertainty-aware model predictive controller that is conditioned to the aleatoric (data) uncertainty of the learned dynamics. The controller actively selects the optimal control actions that (i) optimize the control performance and (ii) boost the online learning sample efficiency. We apply the proposed method to a quadrotor system in multiple challenging real-world experiments. Our approach exhibits high flexibility and generalization capabilities by consistently adapting to unseen flight conditions, while it significantly outperforms classical and adaptive control baselines.
UATTA-ENS: Uncertainty Aware Test Time Augmented Ensemble for PIRC Diabetic Retinopathy Detection
Nov 06, 2022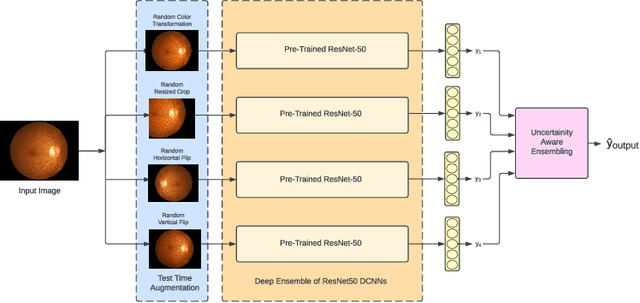
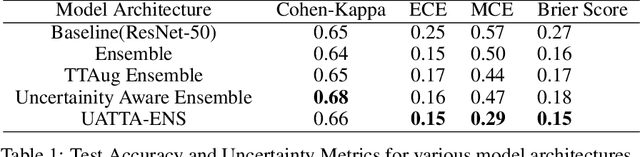
Deep Ensemble Convolutional Neural Networks has become a methodology of choice for analyzing medical images with a diagnostic performance comparable to a physician, including the diagnosis of Diabetic Retinopathy. However, commonly used techniques are deterministic and are therefore unable to provide any estimate of predictive uncertainty. Quantifying model uncertainty is crucial for reducing the risk of misdiagnosis. A reliable architecture should be well-calibrated to avoid over-confident predictions. To address this, we propose a UATTA-ENS: Uncertainty-Aware Test-Time Augmented Ensemble Technique for 5 Class PIRC Diabetic Retinopathy Classification to produce reliable and well-calibrated predictions.
Multi-vehicle Platoon Overtaking Using NoisyNet Multi-Agent Deep Q-Learning Network
Mar 05, 2023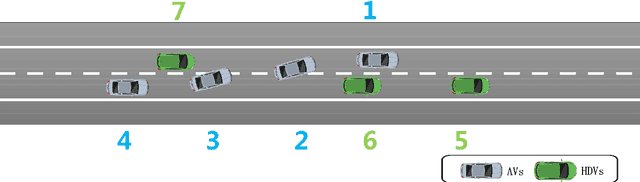
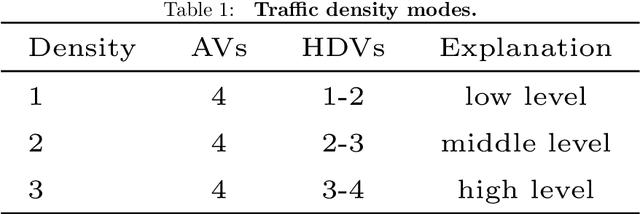
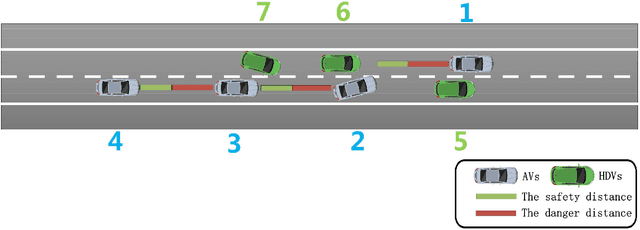
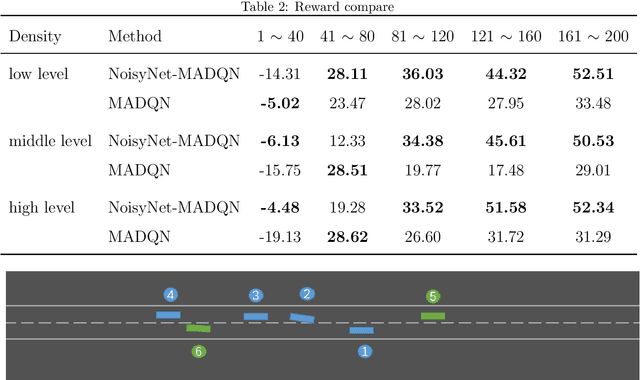
With the recent advancements in Vehicle-to-Vehicle communication technology, autonomous vehicles are able to connect and collaborate in platoon, minimizing accident risks, costs, and energy consumption. The significant benefits of vehicle platooning have gained increasing attention from the automation and artificial intelligence areas. However, few studies have focused on platoon with overtaking. To address this problem, the NoisyNet multi-agent deep Q-learning algorithm is developed in this paper, which the NoisyNet is employed to improve the exploration of the environment. By considering the factors of overtake, speed, collision, time headway and following vehicles, a domain-tailored reward function is proposed to accomplish safe platoon overtaking with high speed. Finally, simulation results show that the proposed method achieves successfully overtake in various traffic density situations.
Assessing gender fairness in EEG-based machine learning detection of Parkinson's disease: A multi-center study
Mar 11, 2023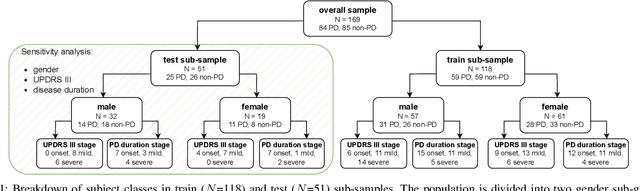
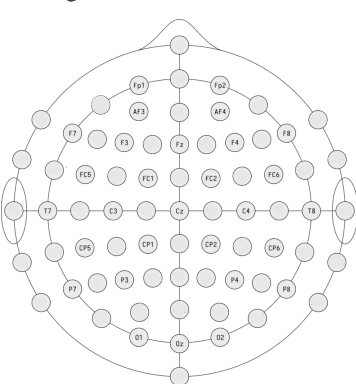
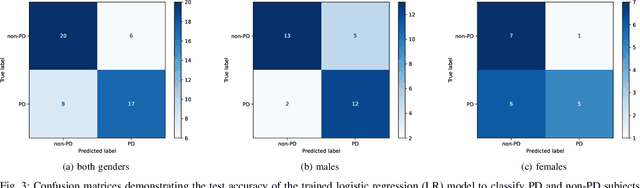
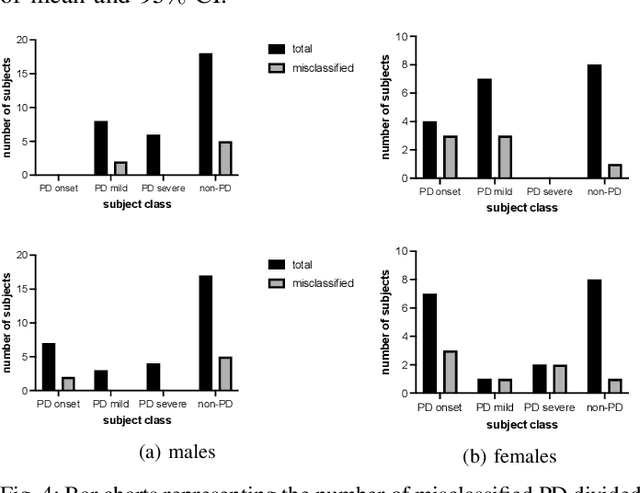
As the number of automatic tools based on machine learning (ML) and resting-state electroencephalography (rs-EEG) for Parkinson's disease (PD) detection keeps growing, the assessment of possible exacerbation of health disparities by means of fairness and bias analysis becomes more relevant. Protected attributes, such as gender, play an important role in PD diagnosis development. However, analysis of sub-group populations stemming from different genders is seldom taken into consideration in ML models' development or the performance assessment for PD detection. In this work, we perform a systematic analysis of the detection ability for gender sub-groups in a multi-center setting of a previously developed ML algorithm based on power spectral density (PSD) features of rs-EEG. We find significant differences in the PD detection ability for males and females at testing time (80.5% vs. 63.7% accuracy) and significantly higher activity for a set of parietal and frontal EEG channels and frequency sub-bands for PD and non-PD males that might explain the differences in the PD detection ability for the gender sub-groups.
Just Flip: Flipped Observation Generation and Optimization for Neural Radiance Fields to Cover Unobserved View
Mar 11, 2023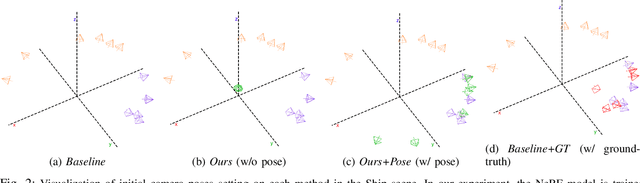
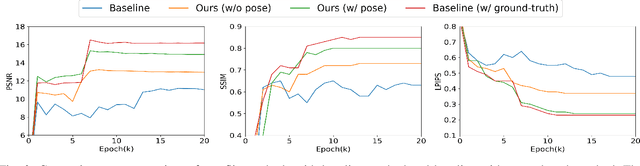


With the advent of Neural Radiance Field (NeRF), representing 3D scenes through multiple observations has shown remarkable improvements in performance. Since this cutting-edge technique is able to obtain high-resolution renderings by interpolating dense 3D environments, various approaches have been proposed to apply NeRF for the spatial understanding of robot perception. However, previous works are challenging to represent unobserved scenes or views on the unexplored robot trajectory, as these works do not take into account 3D reconstruction without observation information. To overcome this problem, we propose a method to generate flipped observation in order to cover unexisting observation for unexplored robot trajectory. To achieve this, we propose a data augmentation method for 3D reconstruction using NeRF by flipping observed images, and estimating flipped camera 6DOF poses. Our technique exploits the property of objects being geometrically symmetric, making it simple but fast and powerful, thereby making it suitable for robotic applications where real-time performance is important. We demonstrate that our method significantly improves three representative perceptual quality measures on the NeRF synthetic dataset.
DeltaEdit: Exploring Text-free Training for Text-Driven Image Manipulation
Mar 11, 2023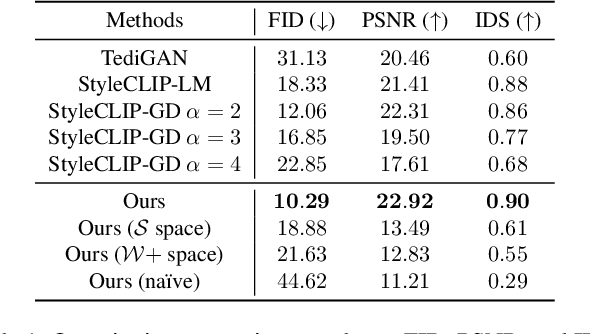
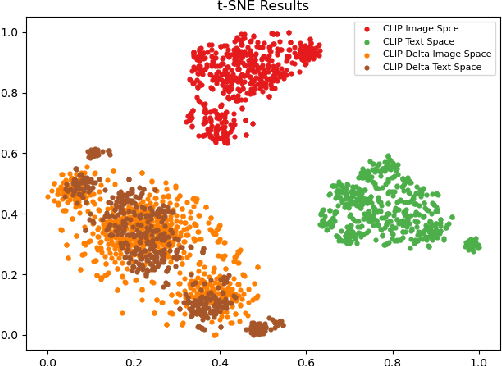
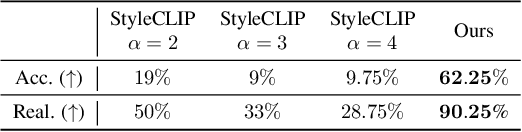
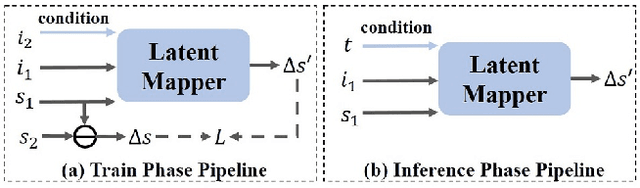
Text-driven image manipulation remains challenging in training or inference flexibility. Conditional generative models depend heavily on expensive annotated training data. Meanwhile, recent frameworks, which leverage pre-trained vision-language models, are limited by either per text-prompt optimization or inference-time hyper-parameters tuning. In this work, we propose a novel framework named \textit{DeltaEdit} to address these problems. Our key idea is to investigate and identify a space, namely delta image and text space that has well-aligned distribution between CLIP visual feature differences of two images and CLIP textual embedding differences of source and target texts. Based on the CLIP delta space, the DeltaEdit network is designed to map the CLIP visual features differences to the editing directions of StyleGAN at training phase. Then, in inference phase, DeltaEdit predicts the StyleGAN's editing directions from the differences of the CLIP textual features. In this way, DeltaEdit is trained in a text-free manner. Once trained, it can well generalize to various text prompts for zero-shot inference without bells and whistles. Code is available at https://github.com/Yueming6568/DeltaEdit.
System for 3D Acquisition and 3D Reconstruction using Structured Light for Sewer Line Inspection
Mar 06, 2023
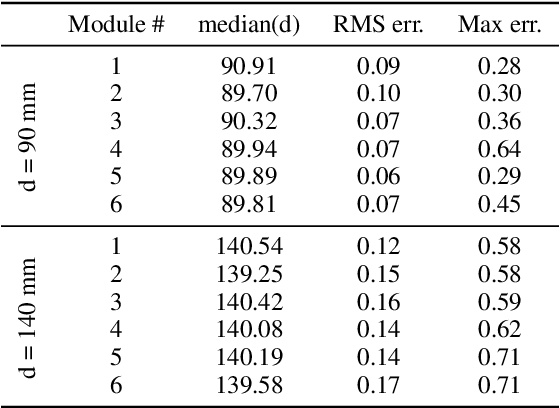
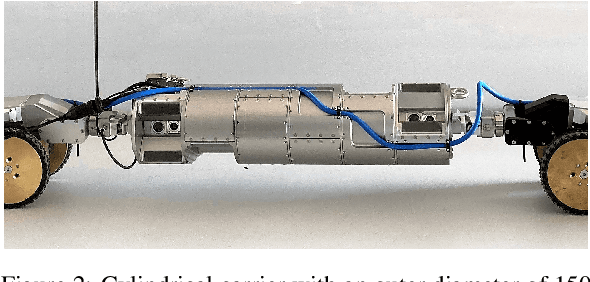
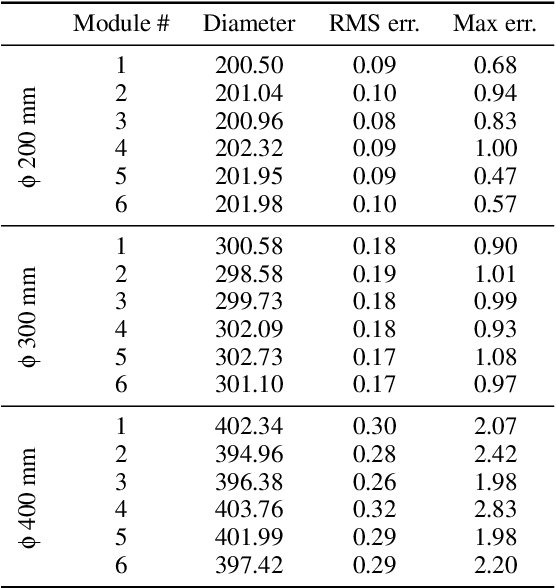
The assessment of sewer pipe systems is a highly important, but at the same time cumbersome and error-prone task. We introduce an innovative system based on single-shot structured light modules that facilitates the detection and classification of spatial defects like jutting intrusions, spallings, or misaligned joints. This system creates highly accurate 3D measurements with sub-millimeter resolution of pipe surfaces and fuses them into a holistic 3D model. The benefit of such a holistic 3D model is twofold: on the one hand, it facilitates the accurate manual sewer pipe assessment, on the other, it simplifies the detection of defects in downstream automatic systems as it endows the input with highly accurate depth information. In this work, we provide an extensive overview of the system and give valuable insights into our design choices.
* 10 pages, published at VISAPP 2023, Lisbon, Portugal