 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Neuromorphic Control using Input-Weighted Threshold Adaptation
Apr 18, 2023
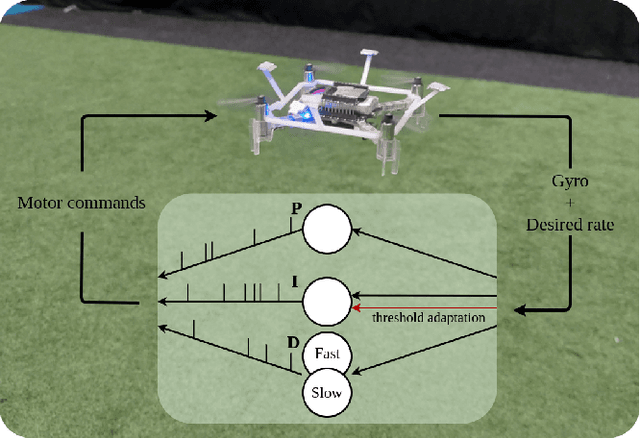
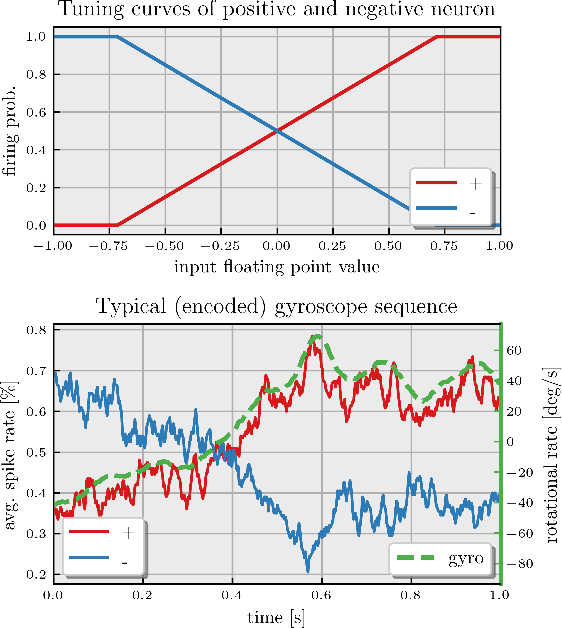
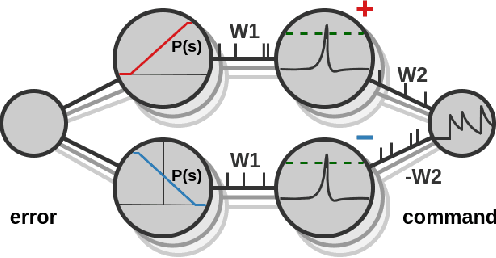
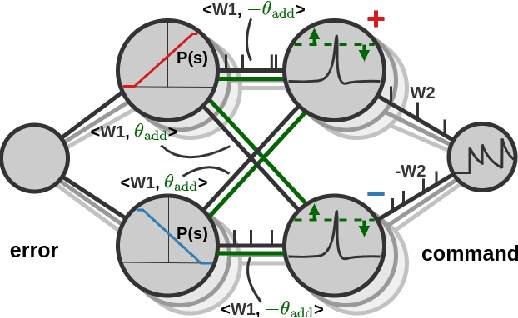
Neuromorphic processing promises high energy efficiency and rapid response rates, making it an ideal candidate for achieving autonomous flight of resource-constrained robots. It will be especially beneficial for complex neural networks as are involved in high-level visual perception. However, fully neuromorphic solutions will also need to tackle low-level control tasks. Remarkably, it is currently still challenging to replicate even basic low-level controllers such as proportional-integral-derivative (PID) controllers. Specifically, it is difficult to incorporate the integral and derivative parts. To address this problem, we propose a neuromorphic controller that incorporates proportional, integral, and derivative pathways during learning. Our approach includes a novel input threshold adaptation mechanism for the integral pathway. This Input-Weighted Threshold Adaptation (IWTA) introduces an additional weight per synaptic connection, which is used to adapt the threshold of the post-synaptic neuron. We tackle the derivative term by employing neurons with different time constants. We first analyze the performance and limits of the proposed mechanisms and then put our controller to the test by implementing it on a microcontroller connected to the open-source tiny Crazyflie quadrotor, replacing the innermost rate controller. We demonstrate the stability of our bio-inspired algorithm with flights in the presence of disturbances. The current work represents a substantial step towards controlling highly dynamic systems with neuromorphic algorithms, thus advancing neuromorphic processing and robotics. In addition, integration is an important part of any temporal task, so the proposed Input-Weighted Threshold Adaptation (IWTA) mechanism may have implications well beyond control tasks.
GlobalMind: Global Multi-head Interactive Self-attention Network for Hyperspectral Change Detection
Apr 18, 2023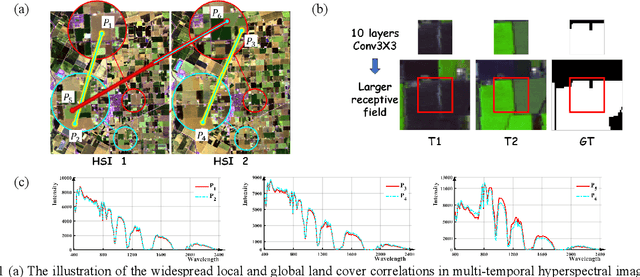
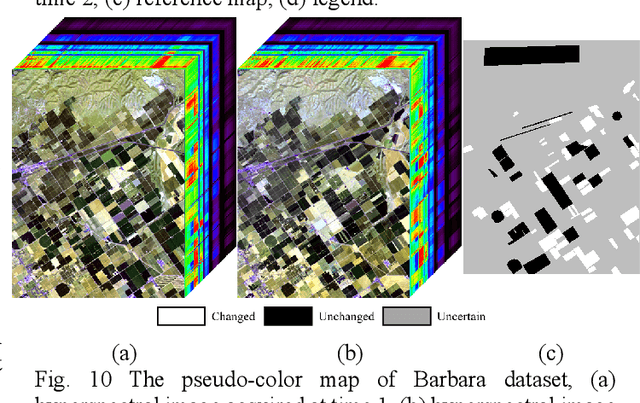
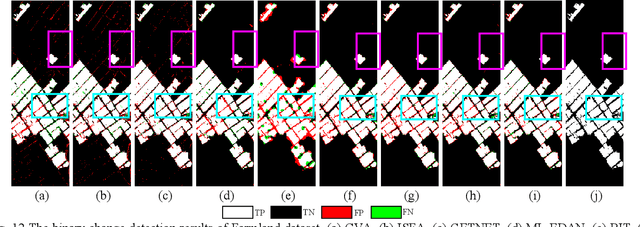
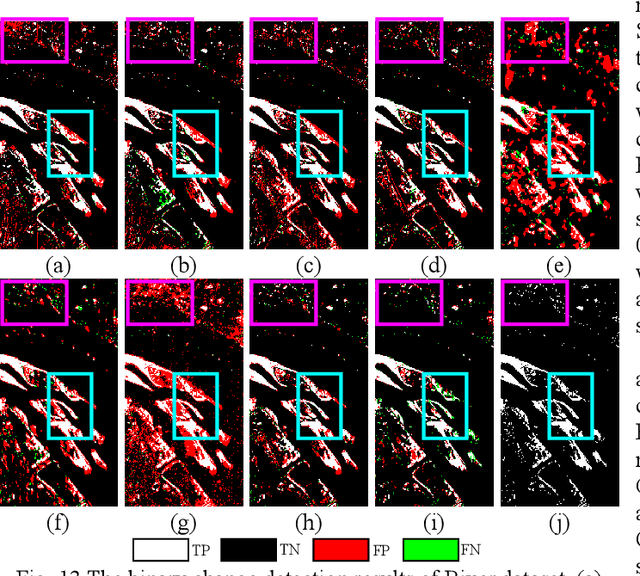
High spectral resolution imagery of the Earth's surface enables users to monitor changes over time in fine-grained scale, playing an increasingly important role in agriculture, defense, and emergency response. However, most current algorithms are still confined to describing local features and fail to incorporate a global perspective, which limits their ability to capture interactions between global features, thus usually resulting in incomplete change regions. In this paper, we propose a Global Multi-head INteractive self-attention change Detection network (GlobalMind) to explore the implicit correlation between different surface objects and variant land cover transformations, acquiring a comprehensive understanding of the data and accurate change detection result. Firstly, a simple but effective Global Axial Segmentation (GAS) strategy is designed to expand the self-attention computation along the row space or column space of hyperspectral images, allowing the global connection with high efficiency. Secondly, with GAS, the global spatial multi-head interactive self-attention (Global-M) module is crafted to mine the abundant spatial-spectral feature involving potential correlations between the ground objects from the entire rich and complex hyperspectral space. Moreover, to acquire the accurate and complete cross-temporal changes, we devise a global temporal interactive multi-head self-attention (GlobalD) module which incorporates the relevance and variation of bi-temporal spatial-spectral features, deriving the integrate potential same kind of changes in the local and global range with the combination of GAS. We perform extensive experiments on five mostly used hyperspectral datasets, and our method outperforms the state-of-the-art algorithms with high accuracy and efficiency.
ULEEN: A Novel Architecture for Ultra Low-Energy Edge Neural Networks
Apr 20, 2023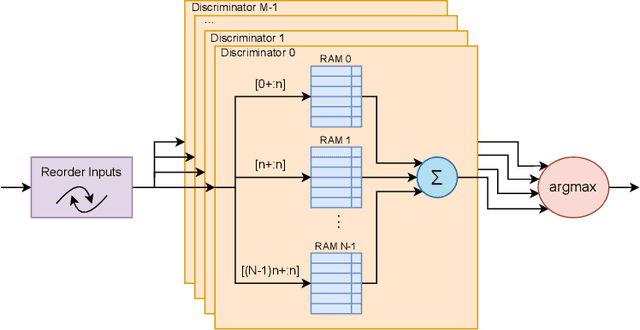
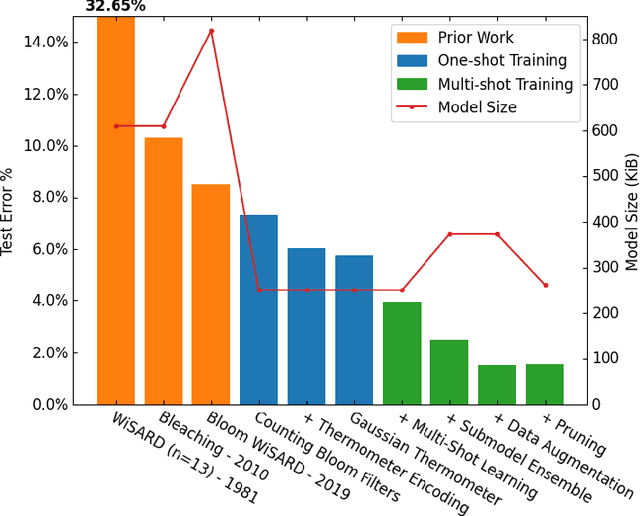
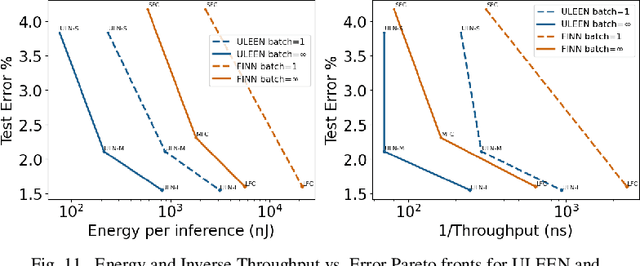
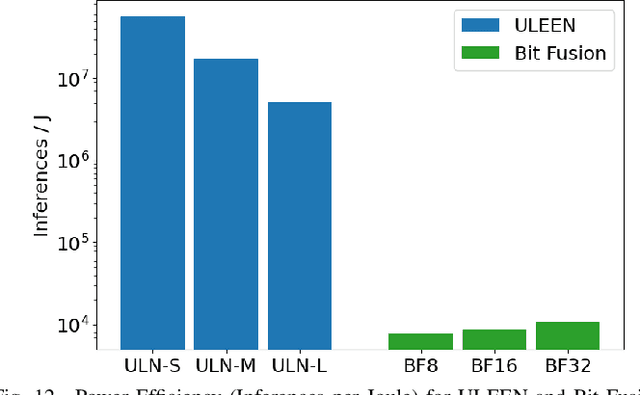
The deployment of AI models on low-power, real-time edge devices requires accelerators for which energy, latency, and area are all first-order concerns. There are many approaches to enabling deep neural networks (DNNs) in this domain, including pruning, quantization, compression, and binary neural networks (BNNs), but with the emergence of the "extreme edge", there is now a demand for even more efficient models. In order to meet the constraints of ultra-low-energy devices, we propose ULEEN, a model architecture based on weightless neural networks. Weightless neural networks (WNNs) are a class of neural model which use table lookups, not arithmetic, to perform computation. The elimination of energy-intensive arithmetic operations makes WNNs theoretically well suited for edge inference; however, they have historically suffered from poor accuracy and excessive memory usage. ULEEN incorporates algorithmic improvements and a novel training strategy inspired by BNNs to make significant strides in improving accuracy and reducing model size. We compare FPGA and ASIC implementations of an inference accelerator for ULEEN against edge-optimized DNN and BNN devices. On a Xilinx Zynq Z-7045 FPGA, we demonstrate classification on the MNIST dataset at 14.3 million inferences per second (13 million inferences/Joule) with 0.21 $\mu$s latency and 96.2% accuracy, while Xilinx FINN achieves 12.3 million inferences per second (1.69 million inferences/Joule) with 0.31 $\mu$s latency and 95.83% accuracy. In a 45nm ASIC, we achieve 5.1 million inferences/Joule and 38.5 million inferences/second at 98.46% accuracy, while a quantized Bit Fusion model achieves 9230 inferences/Joule and 19,100 inferences/second at 99.35% accuracy. In our search for ever more efficient edge devices, ULEEN shows that WNNs are deserving of consideration.
Multiple Hankel matrix rank minimization for audio inpainting
Mar 31, 2023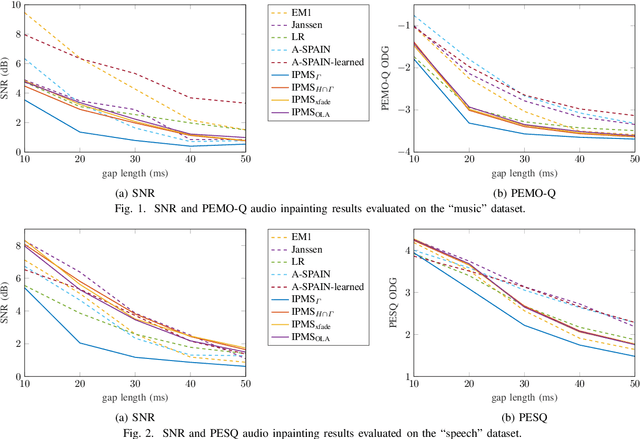

Sasaki et al. (2018) presented an efficient audio declipping algorithm, based on the properties of Hankel-structured matrices constructed from time-domain signal blocks. We adapt their approach to solve the audio inpainting problem, where samples are missing in the signal. We analyze the algorithm and provide modifications, some of them leading to an improved performance. Overall, it turns out that the new algorithms perform reasonably well for speech signals but they are not competitive in the case of music signals.
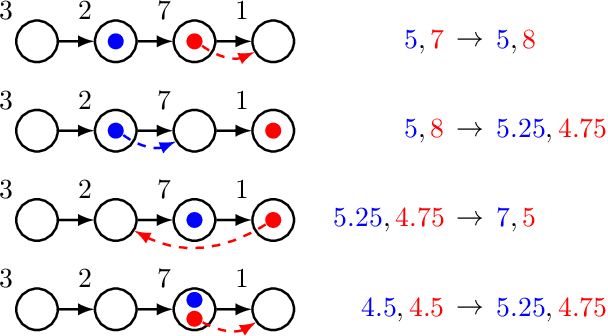
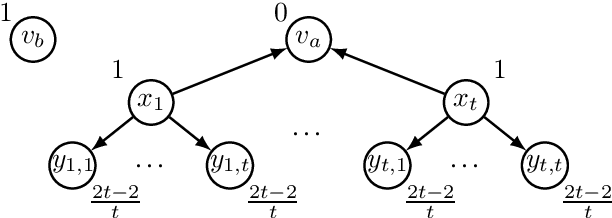
A Formal Metareasoning Model of Concurrent Planning and Execution
Mar 05, 2023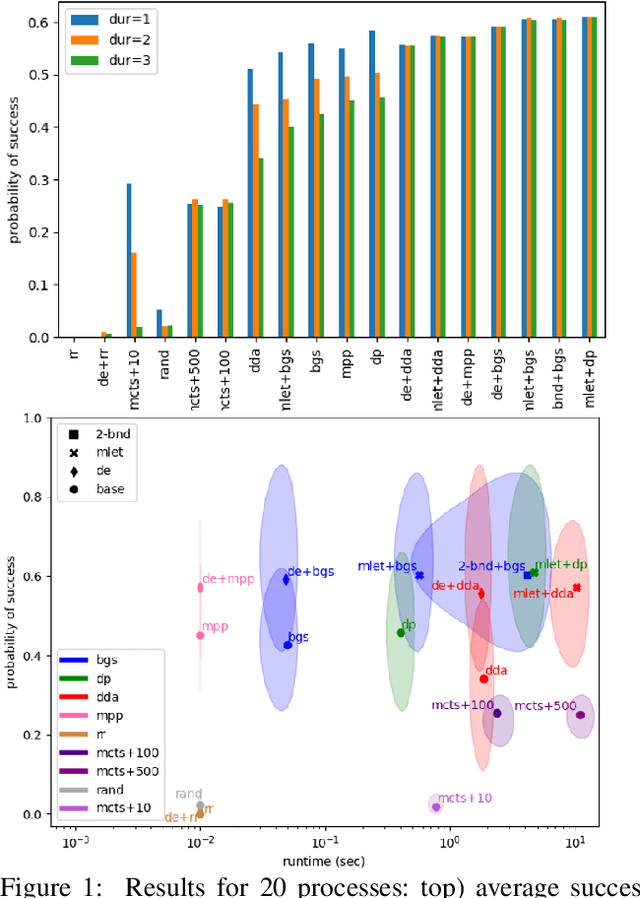
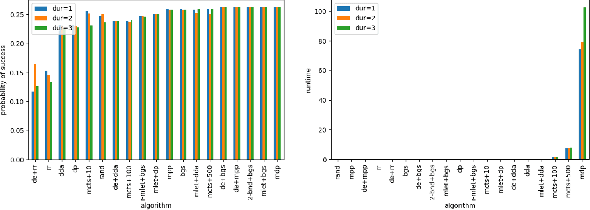
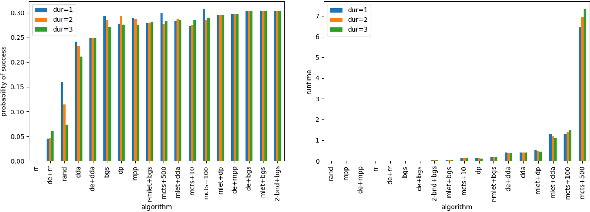
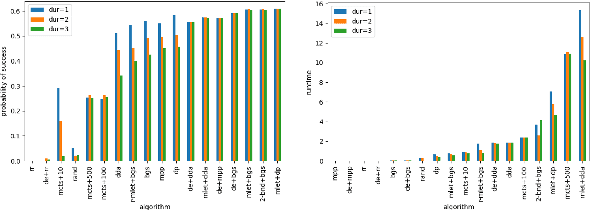
Agents that plan and act in the real world must deal with the fact that time passes as they are planning. When timing is tight, there may be insufficient time to complete the search for a plan before it is time to act. By commencing execution before search concludes, one gains time to search by making planning and execution concurrent. However, this incurs the risk of making incorrect action choices, especially if actions are irreversible. This tradeoff between opportunity and risk is the problem addressed in this paper. Our main contribution is to formally define this setting as an abstract metareasoning problem. We find that the abstract problem is intractable. However, we identify special cases that are solvable in polynomial time, develop greedy solution algorithms, and, through tests on instances derived from search problems, find several methods that achieve promising practical performance. This work lays the foundation for a principled time-aware executive that concurrently plans and executes.
Strategic Facility Location with Clients that Minimize Total Waiting Time
Nov 25, 2022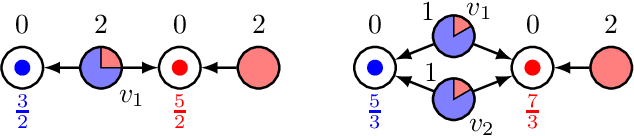
We study a non-cooperative two-sided facility location game in which facilities and clients behave strategically. This is in contrast to many other facility location games in which clients simply visit their closest facility. Facility agents select a location on a graph to open a facility to attract as much purchasing power as possible, while client agents choose which facilities to patronize by strategically distributing their purchasing power in order to minimize their total waiting time. Here, the waiting time of a facility depends on its received total purchasing power. We show that our client stage is an atomic splittable congestion game, which implies existence, uniqueness and efficient computation of a client equilibrium. Therefore, facility agents can efficiently predict client behavior and make strategic decisions accordingly. Despite that, we prove that subgame perfect equilibria do not exist in all instances of this game and that their existence is NP-hard to decide. On the positive side, we provide a simple and efficient algorithm to compute 3-approximate subgame perfect equilibria.
Semi-Supervised Bifold Teacher-Student Learning for Indoor Presence Detection Under Time-Varying CSI
Dec 21, 2022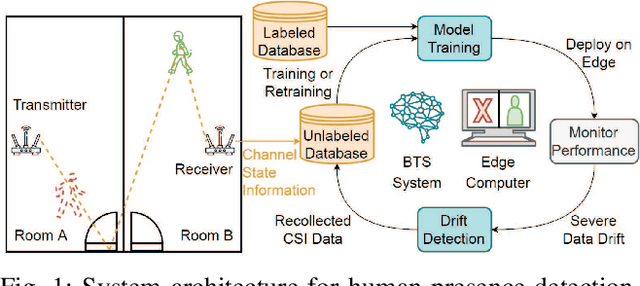
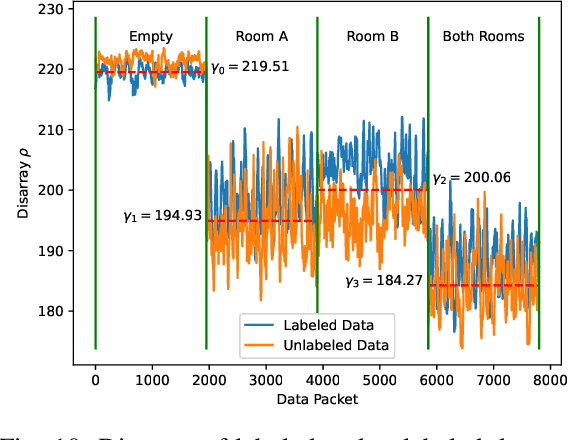
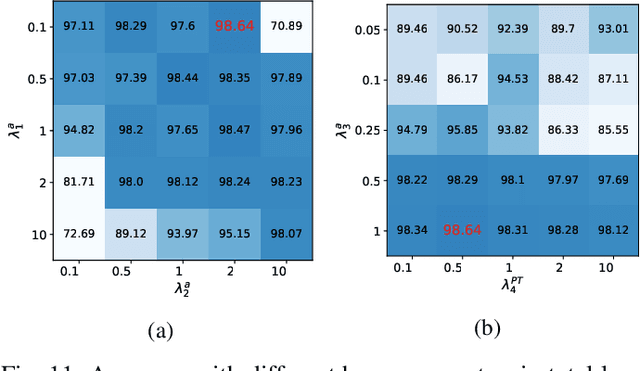
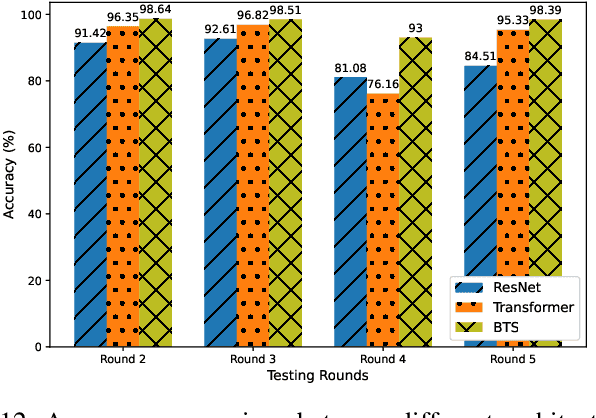
In recent years, there have been abundant researches focused on indoor human presence detection based on laborious supervised learning (SL) and channel state information (CSI). These existing studies adopt spatial information of CSI to improve detection accuracy. However, channel is susceptible to arbitrary environmental changes in practice, such as the object movement, atmospheric factors and machine rebooting, which leads to degraded prediction accuracy. However, the existing SL-based methods require to re-train a new model with time-consuming labeling. Therefore, designing a semi-supervised learning (SSL) based scheme by continuously monitoring model "life-cycle" becomes compellingly imperative. In this paper, we propose bifold teacher-student (BTS) learning for presence detection system, which combines SSL by utilizing partial labeled and unlabeled dataset. The proposed primal-dual teacher-student network is capable of intelligently learning spatial and temporal features from labeled and unlabeled CSI. Additionally, the enhanced penalized loss function leveraging entropy and distance measure can distinguish the drifted data, i.e., features of new dataset are affected by time-varying effect and are alternated from the original distribution. The experimental results demonstrate that the proposed BTS system can sustain the asymptotic accuracy after retraining the model with unlabeled data. Moreover, label-free BTS outperforms the existing SSL-based models in terms of the highest detection accuracy, while achieving the similar performance of SL-based methods.
Learning unidirectional coupling using echo-state network
Mar 23, 2023Reservoir Computing has found many potential applications in the field of complex dynamics. In this article, we exploit the exceptional capability of the echo-state network (ESN) model to make it learn a unidirectional coupling scheme from only a few time series data of the system. We show that, once trained with a few example dynamics of a drive-response system, the machine is able to predict the response system's dynamics for any driver signal with the same coupling. Only a few time series data of an $A-B$ type drive-response system in training is sufficient for the ESN to learn the coupling scheme. After training even if we replace drive system $A$ with a different system $C$, the ESN can reproduce the dynamics of response system $B$ using the dynamics of new drive system $C$ only.
Uniform-in-Time Propagation of Chaos for Mean Field Langevin Dynamics
Dec 06, 2022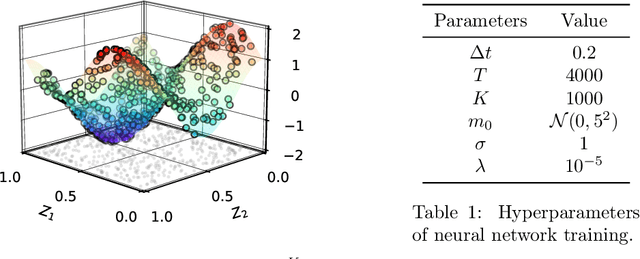
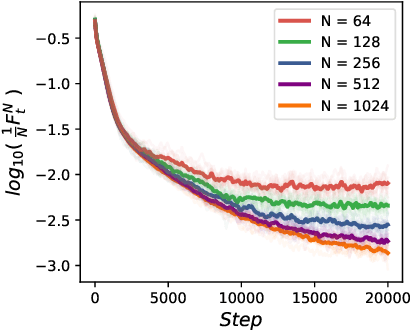
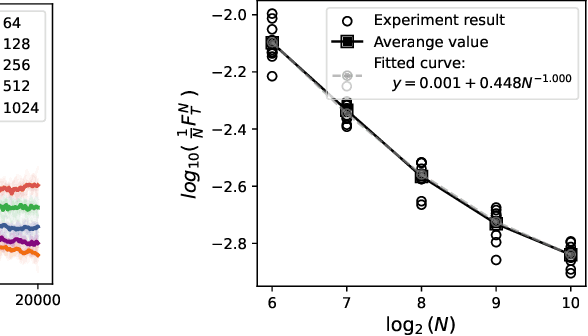
We study the uniform-in-time propagation of chaos for mean field Langevin dynamics with convex mean field potenital. Convergences in both Wasserstein-$2$ distance and relative entropy are established. We do not require the mean field potenital functional to bear either small mean field interaction or displacement convexity, which are common constraints in the literature. In particular, it allows us to study the efficiency of the noisy gradient descent algorithm for training two-layer neural networks.
Contingency Games for Multi-Agent Interaction
Apr 14, 2023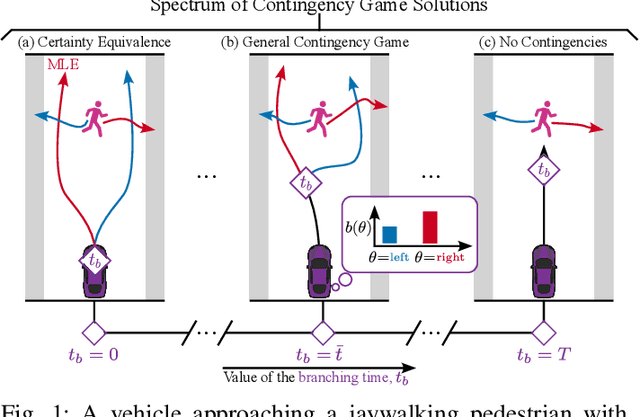
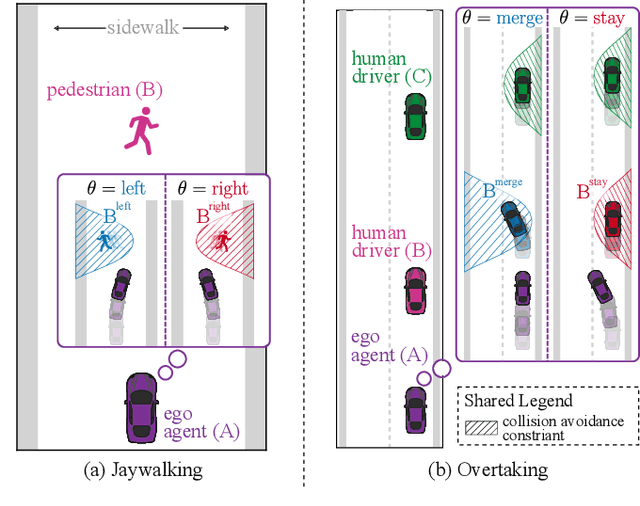
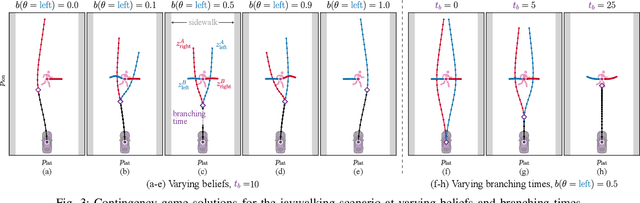
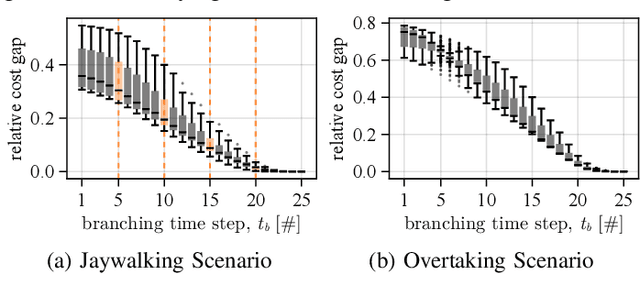
Contingency planning, wherein an agent generates a set of possible plans conditioned on the outcome of an uncertain event, is an increasingly popular way for robots to act under uncertainty. In this work, we take a game-theoretic perspective on contingency planning which is tailored to multi-agent scenarios in which a robot's actions impact the decisions of other agents and vice versa. The resulting contingency game allows the robot to efficiently coordinate with other agents by generating strategic motion plans conditioned on multiple possible intents for other actors in the scene. Contingency games are parameterized via a scalar variable which represents a future time at which intent uncertainty will be resolved. Varying this parameter enables a designer to easily adjust how conservatively the robot behaves in the game. Interestingly, we also find that existing variants of game-theoretic planning under uncertainty are readily obtained as special cases of contingency games. Lastly, we offer an efficient method for solving N-player contingency games with nonlinear dynamics and non-convex costs and constraints. Through a series of simulated autonomous driving scenarios, we demonstrate that plans generated via contingency games provide quantitative performance gains over game-theoretic motion plans that do not account for future uncertainty reduction.