 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
TMS-Net: A Segmentation Network Coupled With A Run-time Quality Control Method For Robust Cardiac Image Segmentation
Dec 21, 2022
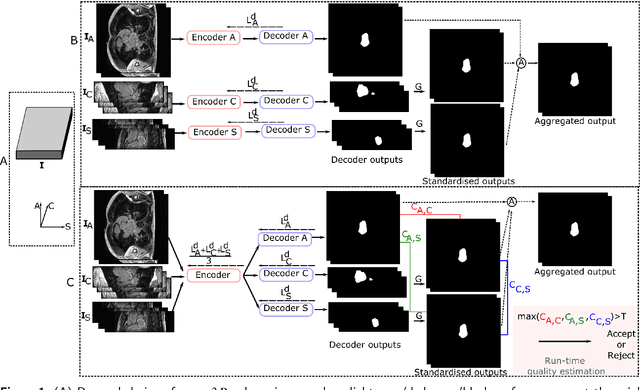
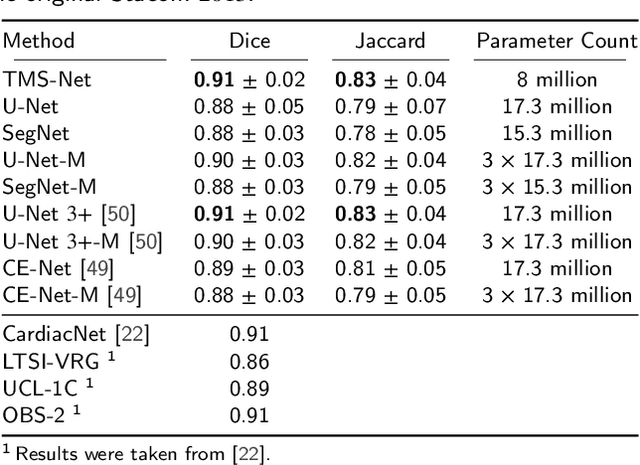
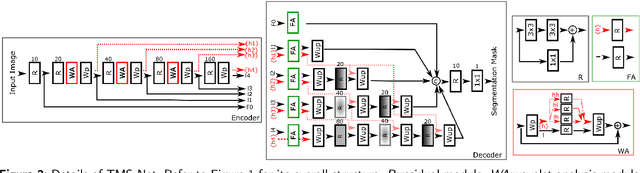
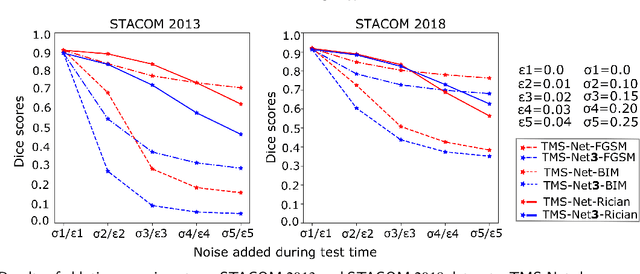
Recently, deep networks have shown impressive performance for the segmentation of cardiac Magnetic Resonance Imaging (MRI) images. However, their achievement is proving slow to transition to widespread use in medical clinics because of robustness issues leading to low trust of clinicians to their results. Predicting run-time quality of segmentation masks can be useful to warn clinicians against poor results. Despite its importance, there are few studies on this problem. To address this gap, we propose a quality control method based on the agreement across decoders of a multi-view network, TMS-Net, measured by the cosine similarity. The network takes three view inputs resliced from the same 3D image along different axes. Different from previous multi-view networks, TMS-Net has a single encoder and three decoders, leading to better noise robustness, segmentation performance and run-time quality estimation in our experiments on the segmentation of the left atrium on STACOM 2013 and STACOM 2018 challenge datasets. We also present a way to generate poor segmentation masks by using noisy images generated with engineered noise and Rician noise to simulate undertraining, high anisotropy and poor imaging settings problems. Our run-time quality estimation method show a good classification of poor and good quality segmentation masks with an AUC reaching to 0.97 on STACOM 2018. We believe that TMS-Net and our run-time quality estimation method has a high potential to increase the thrust of clinicians to automatic image analysis tools.
Mixture of segmentation for heterogeneous functional data
Mar 19, 2023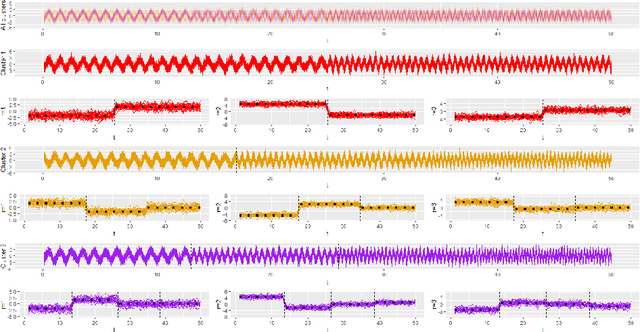
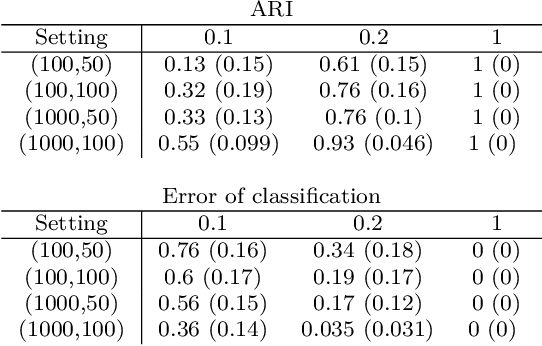
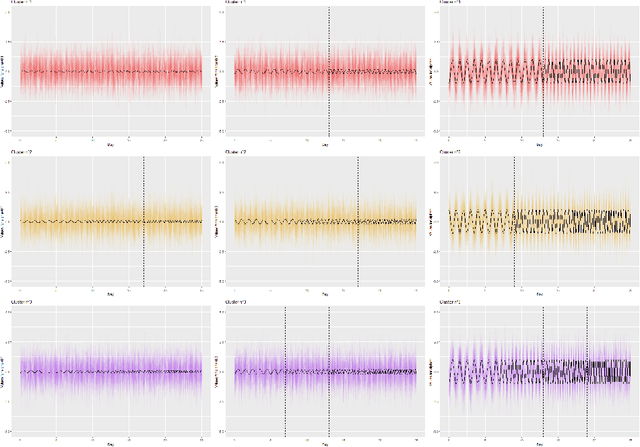
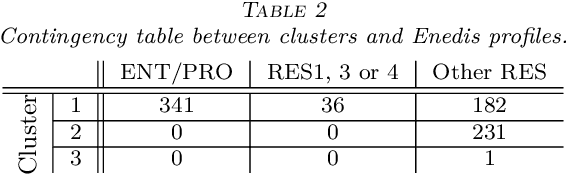
In this paper we consider functional data with heterogeneity in time and in population. We propose a mixture model with segmentation of time to represent this heterogeneity while keeping the functional structure. Maximum likelihood estimator is considered, proved to be identifiable and consistent. In practice, an EM algorithm is used, combined with dynamic programming for the maximization step, to approximate the maximum likelihood estimator. The method is illustrated on a simulated dataset, and used on a real dataset of electricity consumption.
High-Dimensional Approximate Nearest Neighbor Search: with Reliable and Efficient Distance Comparison Operations
Mar 17, 2023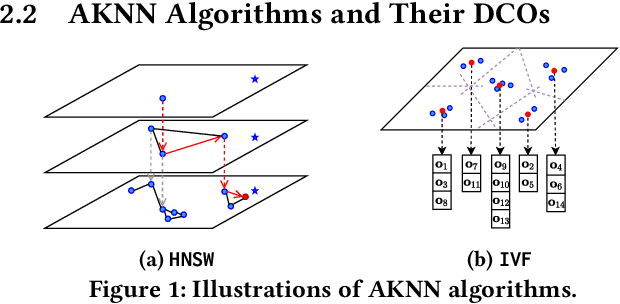
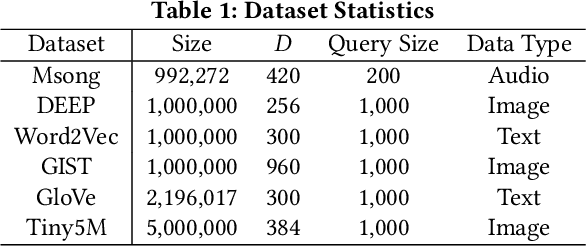
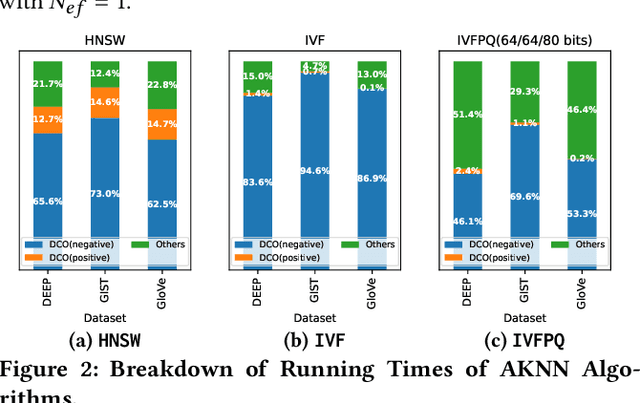
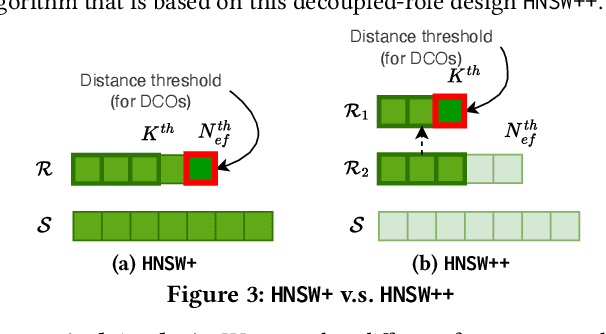
Approximate K nearest neighbor (AKNN) search is a fundamental and challenging problem. We observe that in high-dimensional space, the time consumption of nearly all AKNN algorithms is dominated by that of the distance comparison operations (DCOs). For each operation, it scans full dimensions of an object and thus, runs in linear time wrt the dimensionality. To speed it up, we propose a randomized algorithm named ADSampling which runs in logarithmic time wrt to the dimensionality for the majority of DCOs and succeeds with high probability. In addition, based on ADSampling we develop one general and two algorithm-specific techniques as plugins to enhance existing AKNN algorithms. Both theoretical and empirical studies confirm that: (1) our techniques introduce nearly no accuracy loss and (2) they consistently improve the efficiency.
MSAT: Biologically Inspired Multi-Stage Adaptive Threshold for Conversion of Spiking Neural Networks
Mar 23, 2023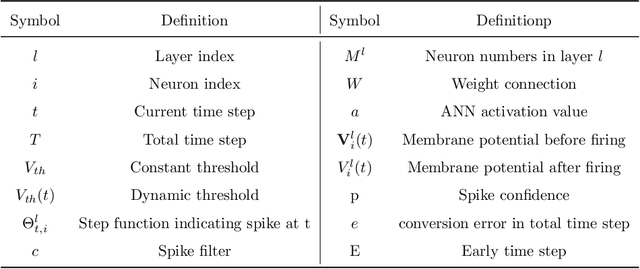
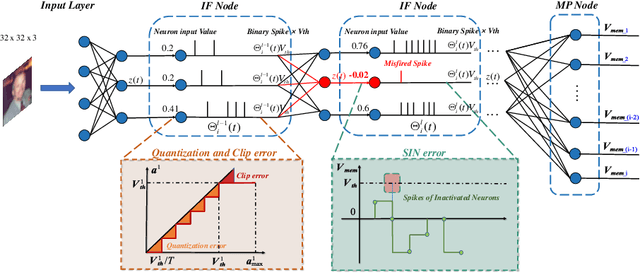
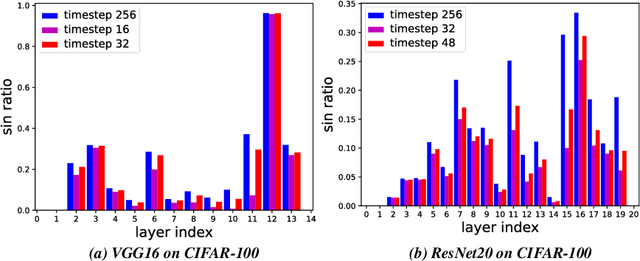
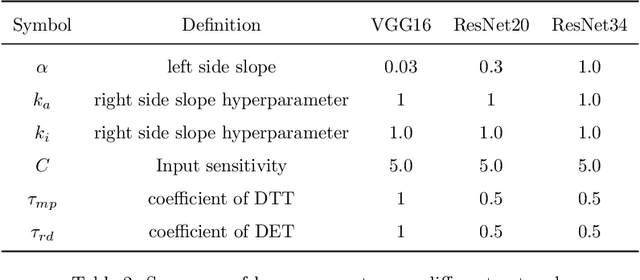
Spiking Neural Networks (SNNs) can do inference with low power consumption due to their spike sparsity. ANN-SNN conversion is an efficient way to achieve deep SNNs by converting well-trained Artificial Neural Networks (ANNs). However, the existing methods commonly use constant threshold for conversion, which prevents neurons from rapidly delivering spikes to deeper layers and causes high time delay. In addition, the same response for different inputs may result in information loss during the information transmission. Inspired by the biological model mechanism, we propose a multi-stage adaptive threshold (MSAT). Specifically, for each neuron, the dynamic threshold varies with firing history and input properties and is positively correlated with the average membrane potential and negatively correlated with the rate of depolarization. The self-adaptation to membrane potential and input allows a timely adjustment of the threshold to fire spike faster and transmit more information. Moreover, we analyze the Spikes of Inactivated Neurons error which is pervasive in early time steps and propose spike confidence accordingly as a measurement of confidence about the neurons that correctly deliver spikes. We use such spike confidence in early time steps to determine whether to elicit spike to alleviate this error. Combined with the proposed method, we examine the performance on non-trivial datasets CIFAR-10, CIFAR-100, and ImageNet. We also conduct sentiment classification and speech recognition experiments on the IDBM and Google speech commands datasets respectively. Experiments show near-lossless and lower latency ANN-SNN conversion. To the best of our knowledge, this is the first time to build a biologically inspired multi-stage adaptive threshold for converted SNN, with comparable performance to state-of-the-art methods while improving energy efficiency.
Feedback and Control of Dynamics and Robotics using Augmented Reality
Mar 23, 2023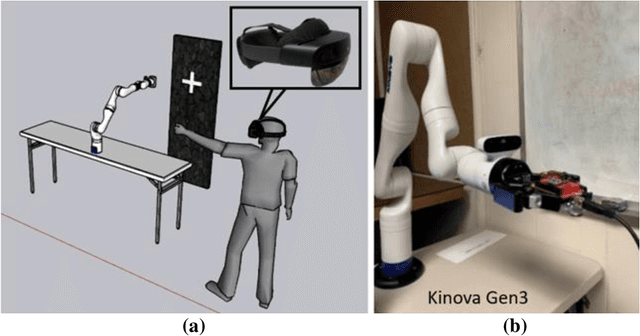
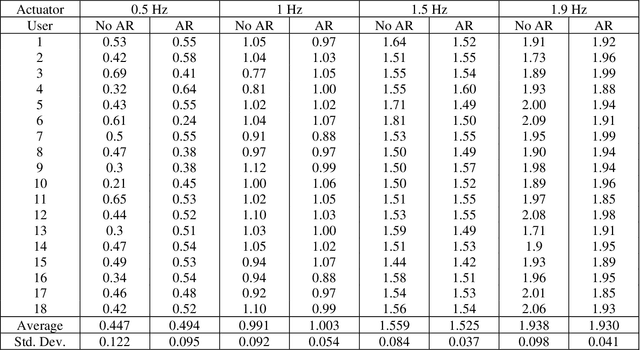
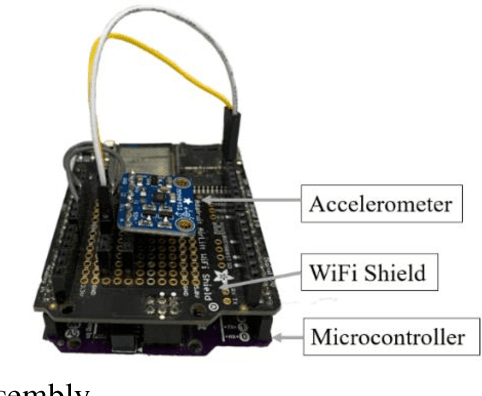
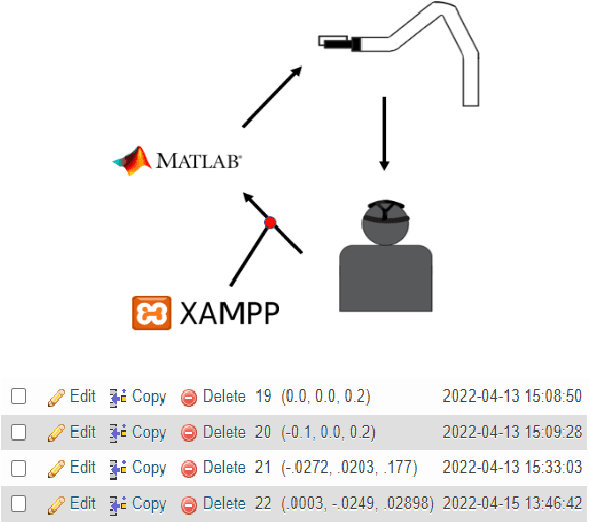
Human-machine interaction (HMI) and human-robot interaction (HRI) can assist structural monitoring and structural dynamics testing in the laboratory and field. In vibratory experimentation, one mode of generating vibration is to use electrodynamic exciters. Manual control is a common way of setting the input of the exciter by the operator. To measure the structural responses to these generated vibrations sensors are attached to the structure. These sensors can be deployed by repeatable robots with high endurance, which require on-the-fly control. If the interface between operators and the controls was augmented, then operators can visualize the experiments, exciter levels, and define robot input with a better awareness of the area of interest. Robots can provide better aid to humans if intelligent on-the-fly control of the robot is: (1) quantified and presented to the human; (2) conducted in real-time for human feedback informed by data. Information provided by the new interface would be used to change the control input based on their understanding of real-time parameters. This research proposes using Augmented Reality (AR) applications to provide humans with sensor feedback and control of actuators and robots. This method improves cognition by allowing the operator to maintain awareness of structures while adjusting conditions accordingly with the assistance of the new real-time interface. One interface application is developed to plot sensor data in addition to voltage, frequency, and duration controls for vibration generation. Two more applications are developed under similar framework, one to control the position of a mediating robot and one to control the frequency of the robot movement. This paper presents the proposed model for the new control loop and then compares the new approach with a traditional method by measuring time delay in control input and user efficiency.
Real-World Community-in-the-Loop Smart Video Surveillance -- A Case Study at a Community College
Mar 22, 2023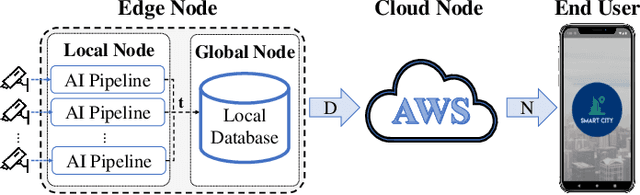
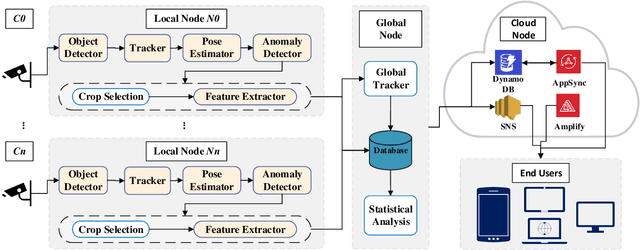
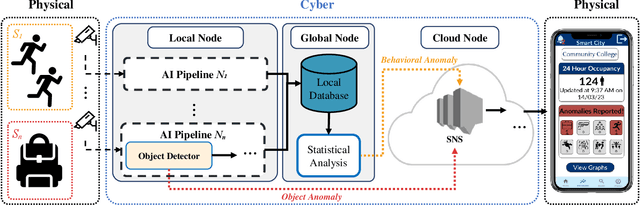
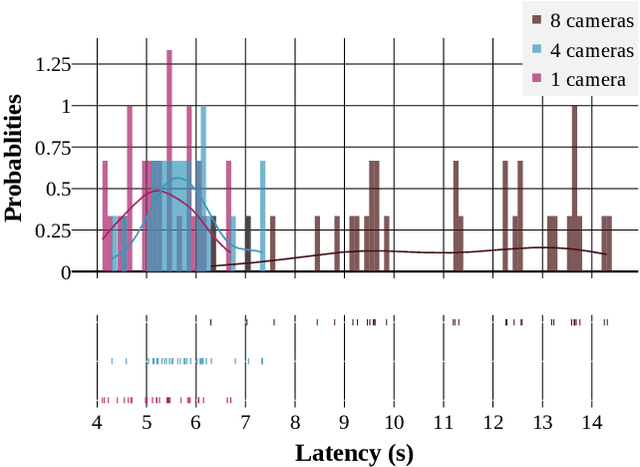
Smart Video surveillance systems have become important recently for ensuring public safety and security, especially in smart cities. However, applying real-time artificial intelligence technologies combined with low-latency notification and alarming has made deploying these systems quite challenging. This paper presents a case study for designing and deploying smart video surveillance systems based on a real-world testbed at a community college. We primarily focus on a smart camera-based system that can identify suspicious/abnormal activities and alert the stakeholders and residents immediately. The paper highlights and addresses different algorithmic and system design challenges to guarantee real-time high-accuracy video analytics processing in the testbed. It also presents an example of cloud system infrastructure and a mobile application for real-time notification to keep students, faculty/staff, and responsible security personnel in the loop. At the same time, it covers the design decision to maintain communities' privacy and ethical requirements as well as hardware configuration and setups. We evaluate the system's performance using throughput and end-to-end latency. The experiment results show that, on average, our system's end-to-end latency to notify the end users in case of detecting suspicious objects is 5.3, 5.78, and 11.11 seconds when running 1, 4, and 8 cameras, respectively. On the other hand, in case of detecting anomalous behaviors, the system could notify the end users with 7.3, 7.63, and 20.78 seconds average latency. These results demonstrate that the system effectively detects and notifies abnormal behaviors and suspicious objects to the end users within a reasonable period. The system can run eight cameras simultaneously at a 32.41 Frame Per Second (FPS) rate.
Extreme Audio Time Stretching Using Neural Synthesis
Nov 30, 2022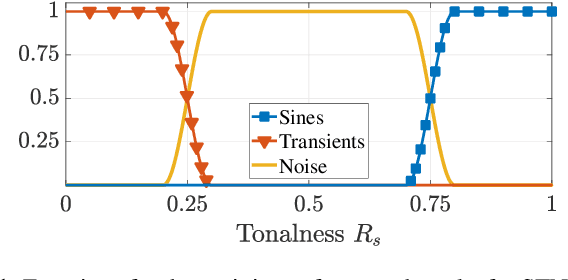
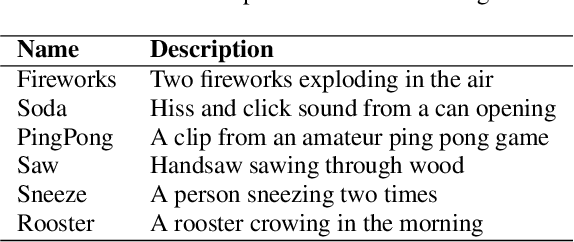
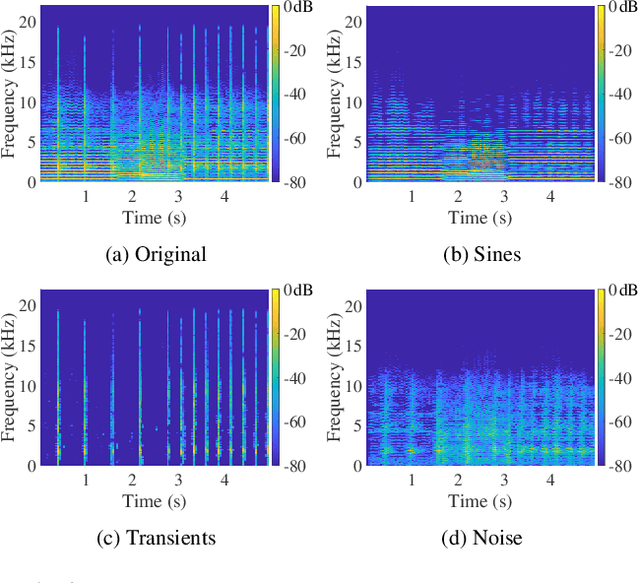
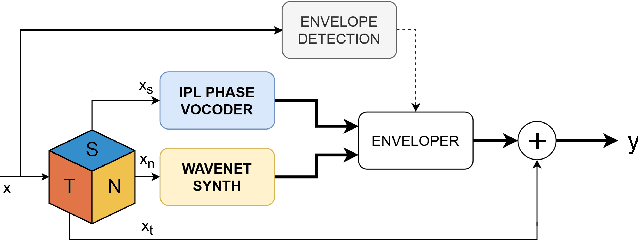
A deep neural network solution for time-scale modification (TSM) focused on large stretching factors is proposed, targeting environmental sounds. Traditional TSM artifacts such as transient smearing, loss of presence, and phasiness are heavily accentuated and cause poor audio quality when the TSM factor is four or larger. The weakness of established TSM methods, often based on a phase vocoder structure, lies in the poor description and scaling of the transient and noise components, or nuances, of a sound. Our novel solution combines a sines-transients-noise decomposition with an independent WaveNet synthesizer to provide a better description of the noise component and an improve sound quality for large stretching factors. Results of a subjective listening test against four other TSM algorithms are reported, showing the proposed method to be often superior. The proposed method is stereo compatible and has a wide range of applications related to the slow motion of media content.
SmartBook: AI-Assisted Situation Report Generation
Mar 28, 2023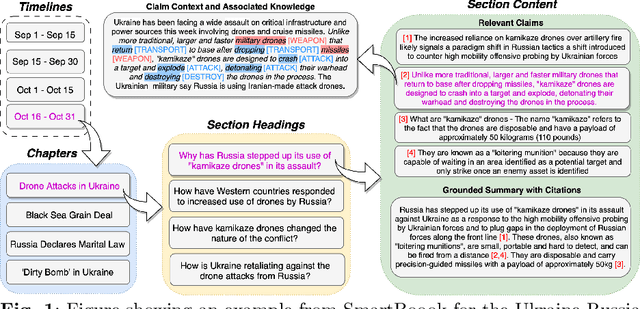
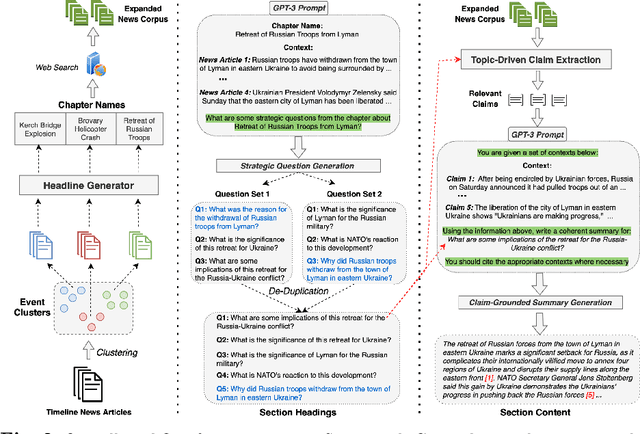
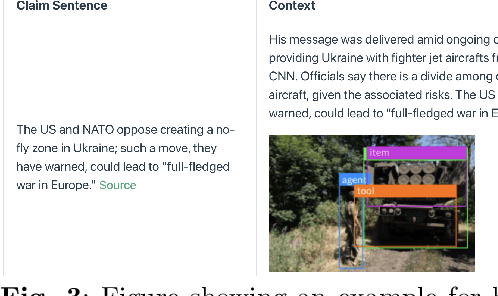

Emerging events, such as the COVID pandemic and the Ukraine Crisis, require a time-sensitive comprehensive understanding of the situation to allow for appropriate decision-making and effective action response. Automated generation of situation reports can significantly reduce the time, effort, and cost for domain experts when preparing their official human-curated reports. However, AI research toward this goal has been very limited, and no successful trials have yet been conducted to automate such report generation. We propose SmartBook, a novel task formulation targeting situation report generation, which consumes large volumes of news data to produce a structured situation report with multiple hypotheses (claims) summarized and grounded with rich links to factual evidence. We realize SmartBook for the Ukraine-Russia crisis by automatically generating intelligence analysis reports to assist expert analysts. The machine-generated reports are structured in the form of timelines, with each timeline organized by major events (or chapters), corresponding strategic questions (or sections) and their grounded summaries (or section content). Our proposed framework automatically detects real-time event-related strategic questions, which are more directed than manually-crafted analyst questions, which tend to be too complex, hard to parse, vague and high-level. Results from thorough qualitative evaluations show that roughly 82% of the questions in Smartbook have strategic importance, with at least 93% of the sections in the report being tactically useful. Further, experiments show that expert analysts tend to add more information into the SmartBook reports, with only 2.3% of the existing tokens being deleted, meaning SmartBook can serve as a useful foundation for analysts to build upon when creating intelligence reports.
Meaningful human command: Advance control directives as a method to enable moral and legal responsibility for autonomous weapons systems
Mar 14, 2023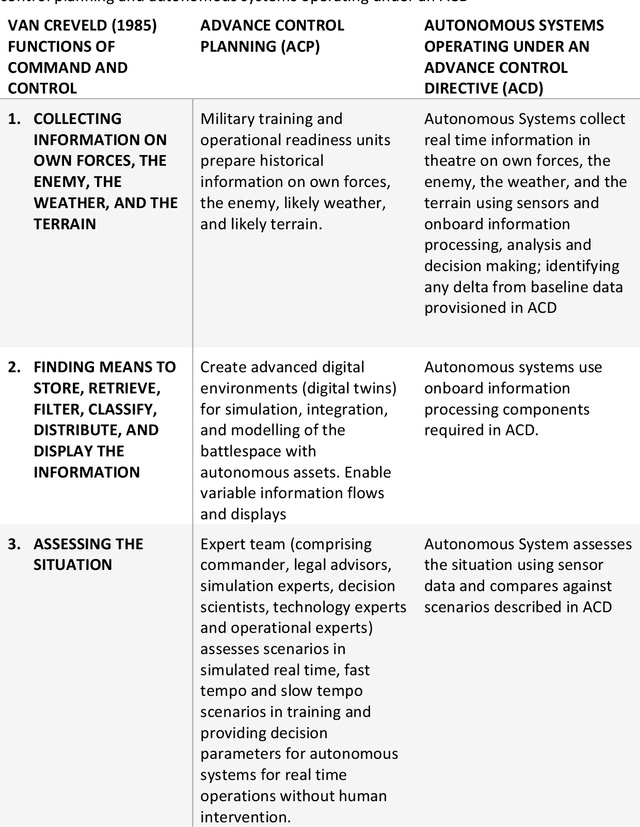
21st Century war is increasing in speed, with conventional forces combined with massed use of autonomous systems and human-machine integration. However, a significant challenge is how humans can ensure moral and legal responsibility for systems operating outside of normal temporal parameters. This chapter considers whether humans can stand outside of real time and authorise actions for autonomous systems by the prior establishment of a contract, for actions to occur in a future context particularly in faster than real time or in very slow operations where human consciousness and concentration could not remain well informed. The medical legal precdent found in 'advance care directives' suggests how the time-consuming, deliberative process required for accountability and responsibility of weapons systems may be achievable outside real time captured in an 'advance control driective' (ACD). The chapter proposes 'autonomy command' scaffolded and legitimised through the construction of ACD ahead of the deployment of autonomous systems.
Dual-Attention Deep Reinforcement Learning for Multi-MAP 3D Trajectory Optimization in Dynamic 5G Networks
Mar 14, 2023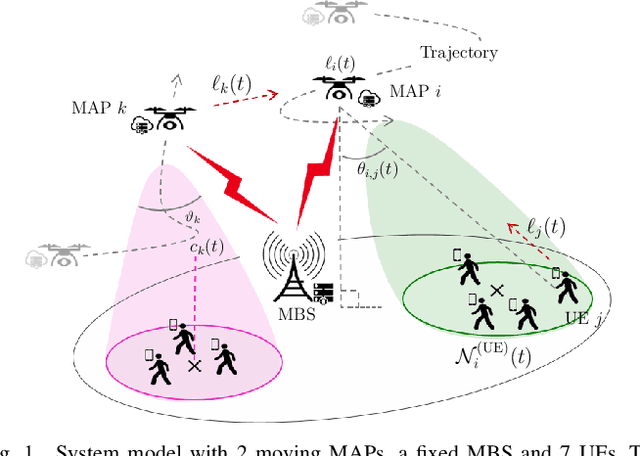
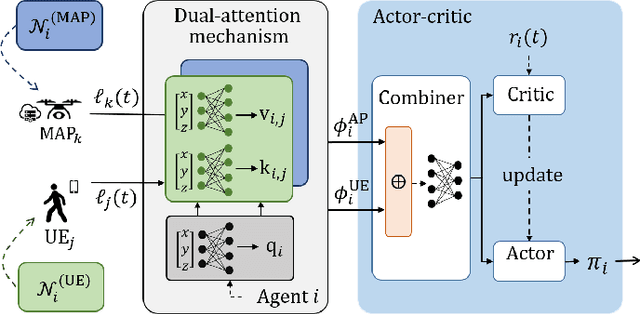
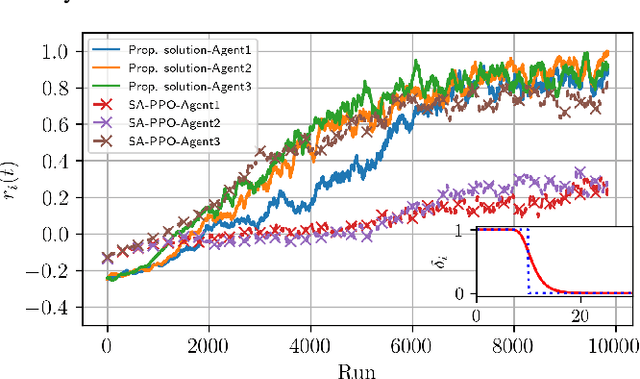
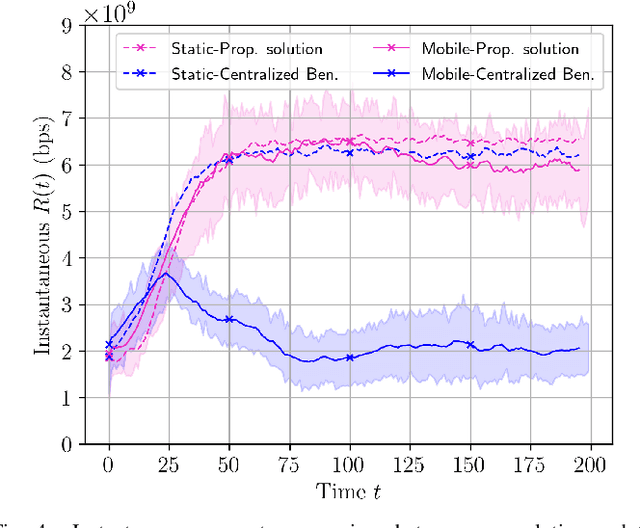
5G and beyond networks need to provide dynamic and efficient infrastructure management to better adapt to time-varying user behaviors (e.g., user mobility, interference, user traffic and evolution of the network topology). In this paper, we propose to manage the trajectory of Mobile Access Points (MAPs) under all these dynamic constraints with reduced complexity. We first formulate the placement problem to manage MAPs over time. Our solution addresses time-varying user traffic and user mobility through a Multi-Agent Deep Reinforcement Learning (MADRL). To achieve real-time behavior, the proposed solution learns to perform distributed assignment of MAP-user positions and schedules the MAP path among all users without centralized user's clustering feedback. Our solution exploits a dual-attention MADRL model via proximal policy optimization to dynamically move MAPs in 3D. The dual-attention takes into account information from both users and MAPs. The cooperation mechanism of our solution allows to manage different scenarios, without a priory information and without re-training, which significantly reduces complexity.