 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Fides: A Generative Framework for Result Validation of Outsourced Machine Learning Workloads via TEE
Mar 31, 2023
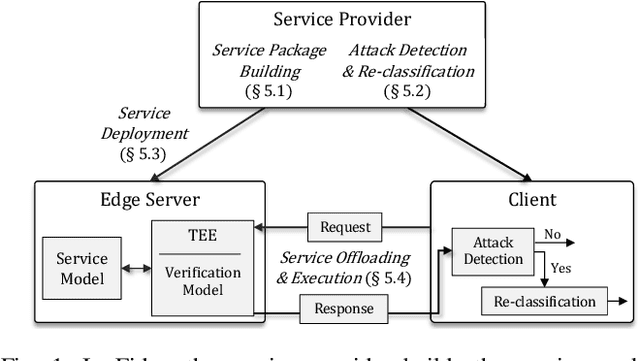
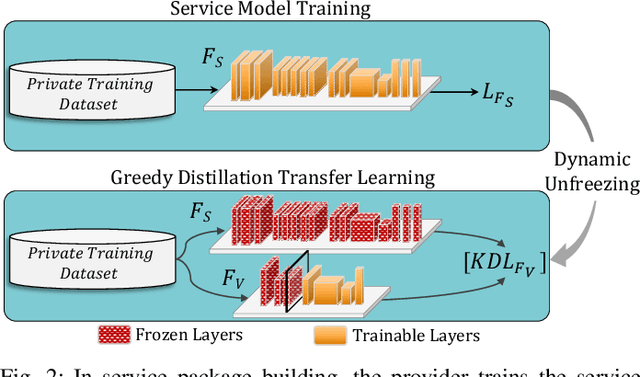
The growing popularity of Machine Learning (ML) has led to its deployment in various sensitive domains, which has resulted in significant research focused on ML security and privacy. However, in some applications, such as autonomous driving, integrity verification of the outsourced ML workload is more critical-a facet that has not received much attention. Existing solutions, such as multi-party computation and proof-based systems, impose significant computation overhead, which makes them unfit for real-time applications. We propose Fides, a novel framework for real-time validation of outsourced ML workloads. Fides features a novel and efficient distillation technique-Greedy Distillation Transfer Learning-that dynamically distills and fine-tunes a space and compute-efficient verification model for verifying the corresponding service model while running inside a trusted execution environment. Fides features a client-side attack detection model that uses statistical analysis and divergence measurements to identify, with a high likelihood, if the service model is under attack. Fides also offers a re-classification functionality that predicts the original class whenever an attack is identified. We devised a generative adversarial network framework for training the attack detection and re-classification models. The extensive evaluation shows that Fides achieves an accuracy of up to 98% for attack detection and 94% for re-classification.
Toward Multi-Service Edge-Intelligence Paradigm: Temporal-Adaptive Prediction for Time-Critical Control over Wireless
Dec 07, 2022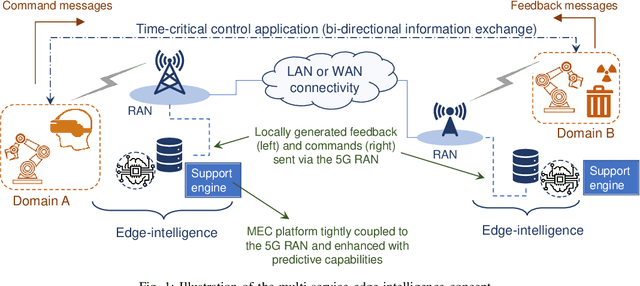
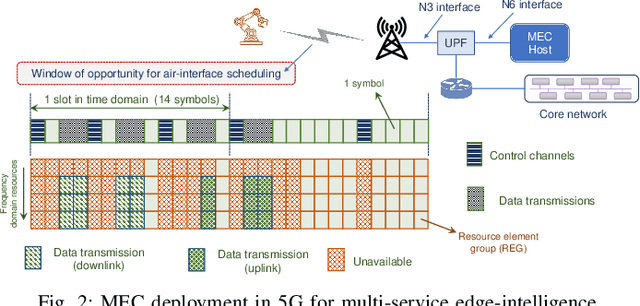
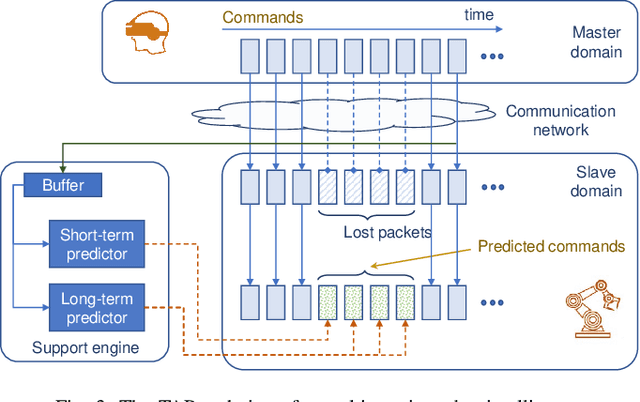
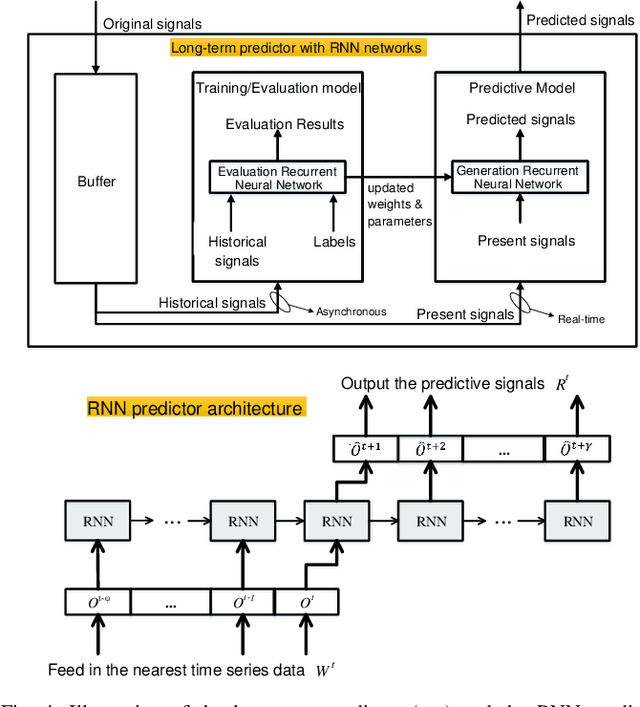
Time-critical control applications typically pose stringent connectivity requirements for communication networks. The imperfections associated with the wireless medium such as packet losses, synchronization errors, and varying delays have a detrimental effect on performance of real-time control, often with safety implications. This paper introduces multi-service edge-intelligence as a new paradigm for realizing time-critical control over wireless. It presents the concept of multi-service edge-intelligence which revolves around tight integration of wireless access, edge-computing and machine learning techniques, in order to provide stability guarantees under wireless imperfections. The paper articulates some of the key system design aspects of multi-service edge-intelligence. It also presents a temporal-adaptive prediction technique to cope with dynamically changing wireless environments. It provides performance results in a robotic teleoperation scenario. Finally, it discusses some open research and design challenges for multi-service edge-intelligence.
Discrimination, calibration, and point estimate accuracy of GRU-D-Weibull architecture for real-time individualized endpoint prediction
Dec 19, 2022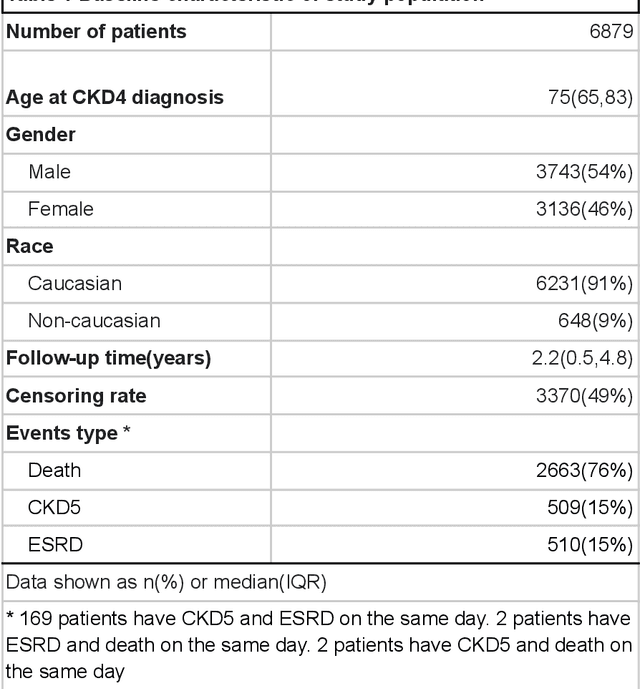
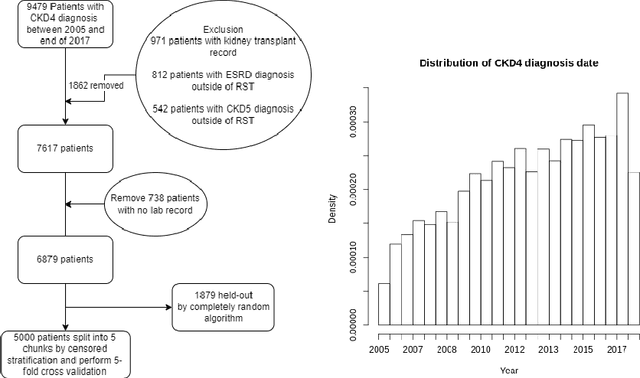
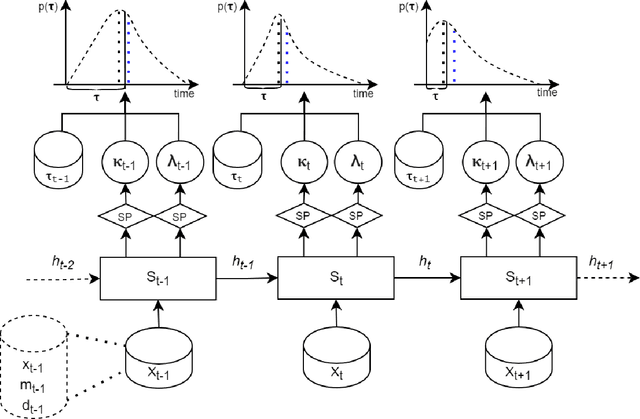
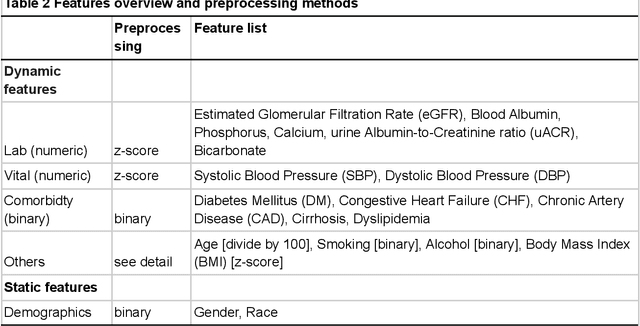
Real-time individual endpoint prediction has always been a challenging task but of great clinic utility for both patients and healthcare providers. With 6,879 chronic kidney disease stage 4 (CKD4) patients as a use case, we explored the feasibility and performance of gated recurrent units with decay that models Weibull probability density function (GRU-D-Weibull) as a semi-parametric longitudinal model for real-time individual endpoint prediction. GRU-D-Weibull has a maximum C-index of 0.77 at 4.3 years of follow-up, compared to 0.68 achieved by competing models. The L1-loss of GRU-D-Weibull is ~66% of XGB(AFT), ~60% of MTLR, and ~30% of AFT model at CKD4 index date. The average absolute L1-loss of GRU-D-Weibull is around one year, with a minimum of 40% Parkes serious error after index date. GRU-D-Weibull is not calibrated and significantly underestimates true survival probability. Feature importance tests indicate blood pressure becomes increasingly important during follow-up, while eGFR and blood albumin are less important. Most continuous features have non-linear/parabola impact on predicted survival time, and the results are generally consistent with existing knowledge. GRU-D-Weibull as a semi-parametric temporal model shows advantages in built-in parameterization of missing, native support for asynchronously arrived measurement, capability of output both probability and point estimates at arbitrary time point for arbitrary prediction horizon, improved discrimination and point estimate accuracy after incorporating newly arrived data. Further research on its performance with more comprehensive input features, in-process or post-process calibration are warranted to benefit CKD4 or alike terminally-ill patients.
Equivalence of Additive and Multiplicative Coupling in Spiking Neural Networks
Apr 11, 2023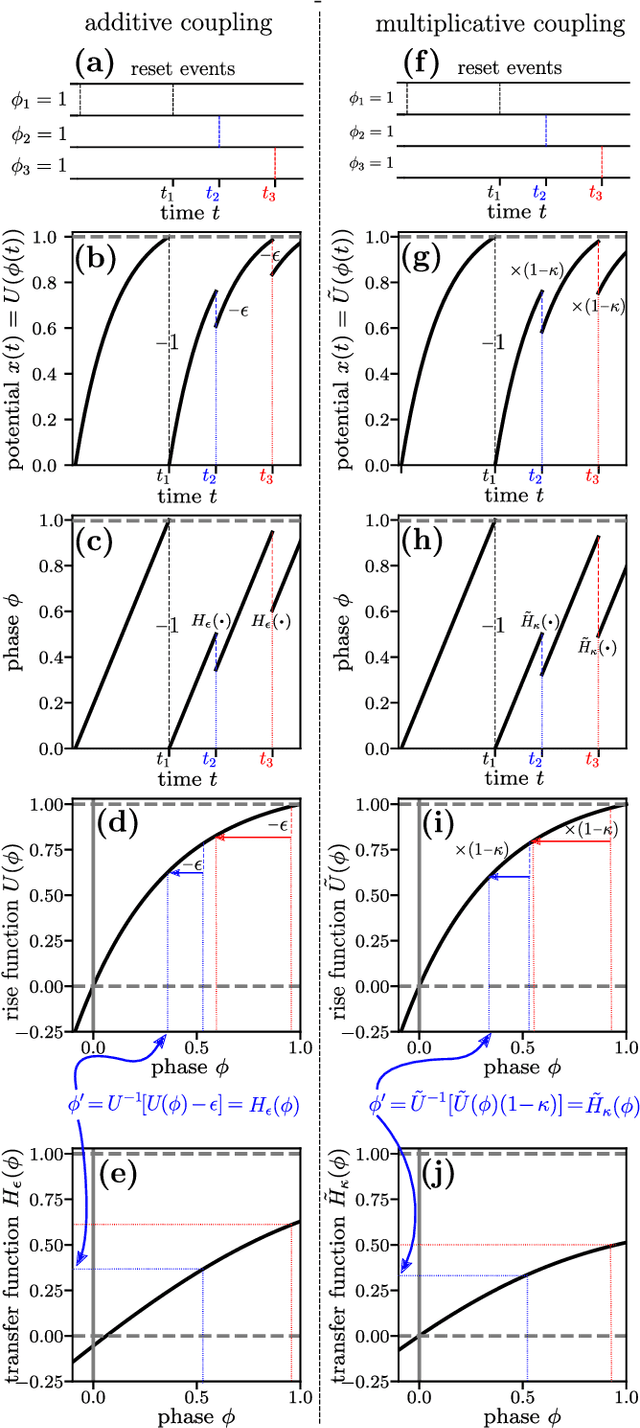
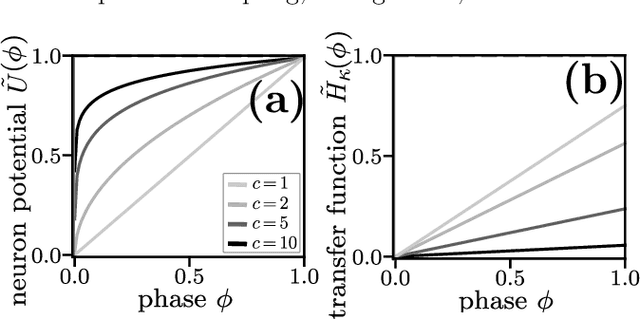
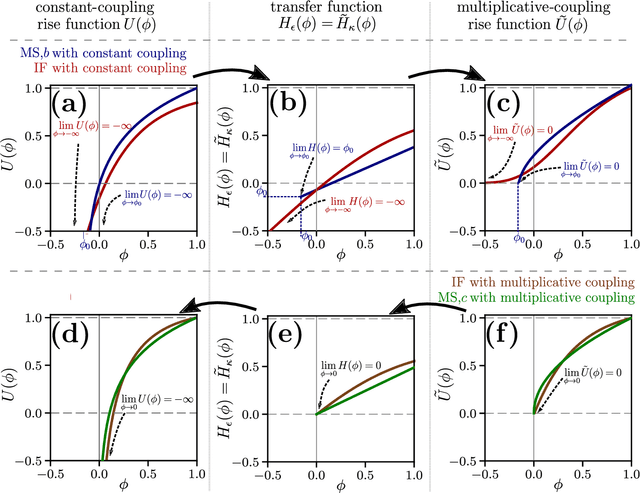
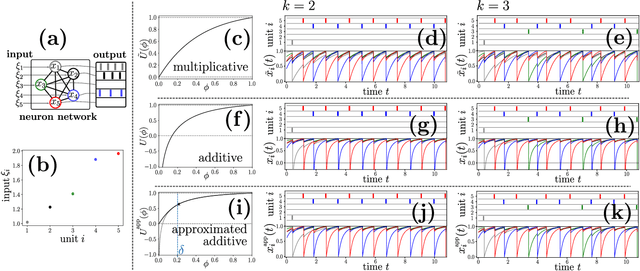
Spiking neural network models characterize the emergent collective dynamics of circuits of biological neurons and help engineer neuro-inspired solutions across fields. Most dynamical systems' models of spiking neural networks typically exhibit one of two major types of interactions: First, the response of a neuron's state variable to incoming pulse signals (spikes) may be additive and independent of its current state. Second, the response may depend on the current neuron's state and multiply a function of the state variable. Here we reveal that spiking neural network models with additive coupling are equivalent to models with multiplicative coupling for simultaneously modified intrinsic neuron time evolution. As a consequence, the same collective dynamics can be attained by state-dependent multiplicative and constant (state-independent) additive coupling. Such a mapping enables the transfer of theoretical insights between spiking neural network models with different types of interaction mechanisms as well as simpler and more effective engineering applications.
TrajFlow: Learning the Distribution over Trajectories
Apr 11, 2023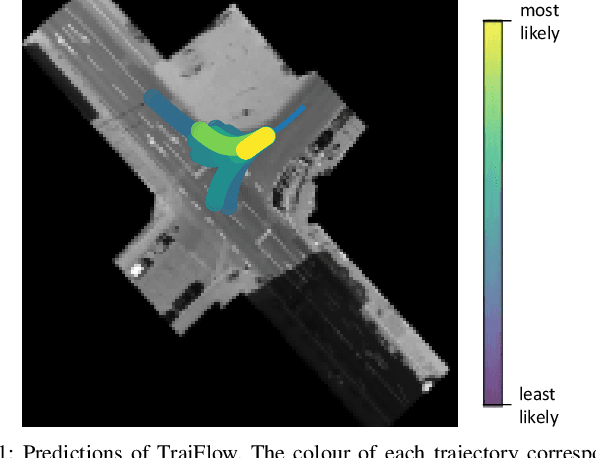
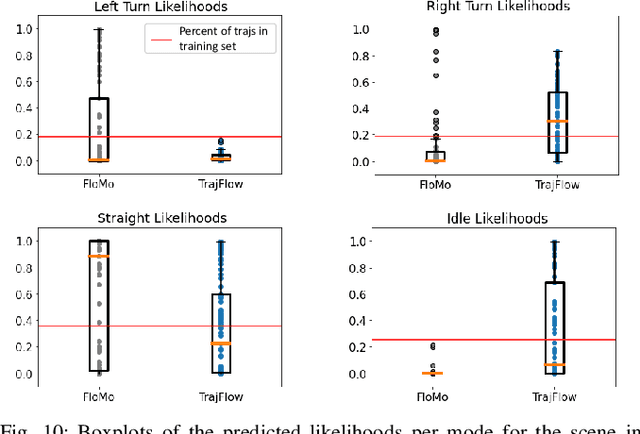
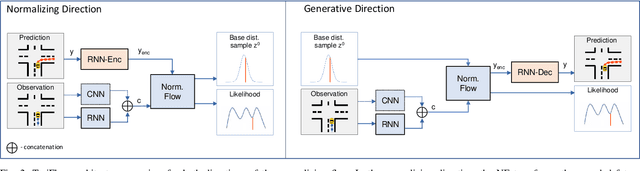
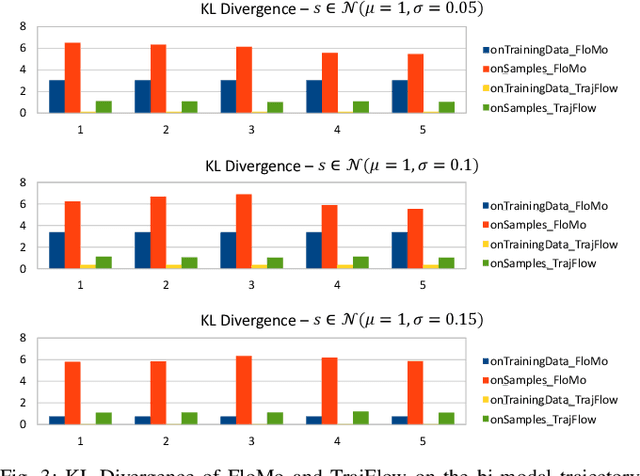
Predicting the future behaviour of people remains an open challenge for the development of risk-aware autonomous vehicles. An important aspect of this challenge is effectively capturing the uncertainty which is inherent to human behaviour. This paper studies an approach for probabilistic motion forecasting with improved accuracy in the predicted sample likelihoods. We are able to learn multi-modal distributions over the motions of an agent solely from data, while also being able to provide predictions in real-time. Our approach achieves state-of-the-art results on the inD dataset when evaluated with the standard metrics employed for motion forecasting. Furthermore, our approach also achieves state-of-the-art results when evaluated with respect to the likelihoods it assigns to its generated trajectories. Evaluations on artificial datasets indicate that the distributions learned by our model closely correspond to the true distributions observed in data and are not as prone towards being over-confident in a single outcome in the face of uncertainty.
Revisiting Single-gated Mixtures of Experts
Apr 11, 2023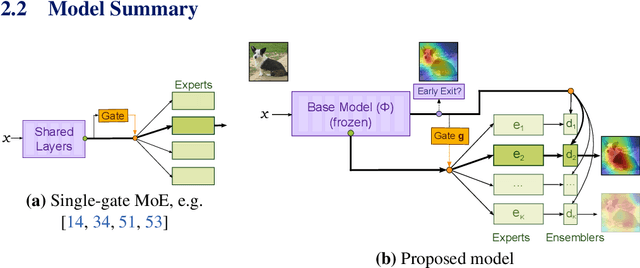
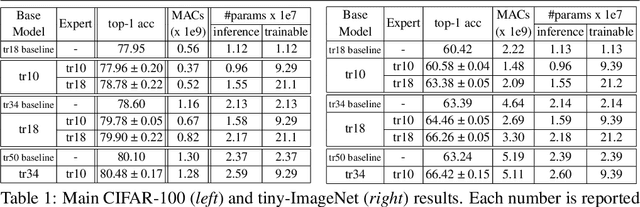
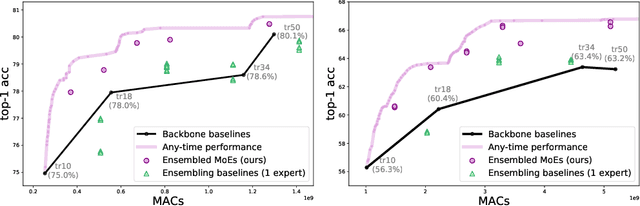
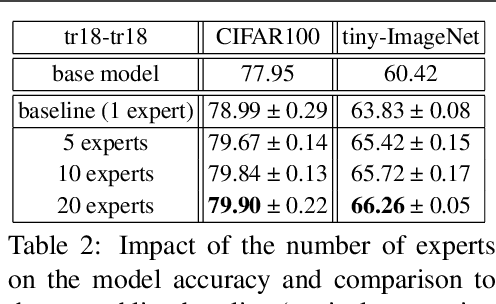
Mixture of Experts (MoE) are rising in popularity as a means to train extremely large-scale models, yet allowing for a reasonable computational cost at inference time. Recent state-of-the-art approaches usually assume a large number of experts, and require training all experts jointly, which often lead to training instabilities such as the router collapsing In contrast, in this work, we propose to revisit the simple single-gate MoE, which allows for more practical training. Key to our work are (i) a base model branch acting both as an early-exit and an ensembling regularization scheme, (ii) a simple and efficient asynchronous training pipeline without router collapse issues, and finally (iii) a per-sample clustering-based initialization. We show experimentally that the proposed model obtains efficiency-to-accuracy trade-offs comparable with other more complex MoE, and outperforms non-mixture baselines. This showcases the merits of even a simple single-gate MoE, and motivates further exploration in this area.
Sampling-based path planning under temporal logic constraints with real-time adaptation
Feb 22, 2023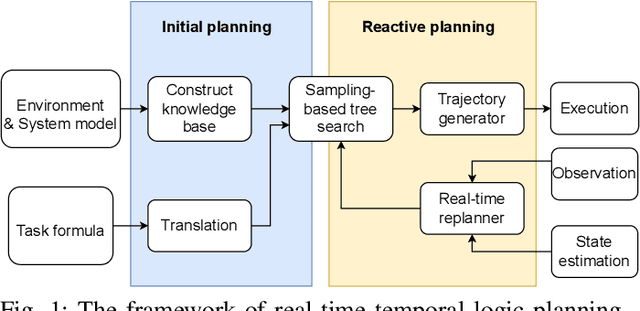
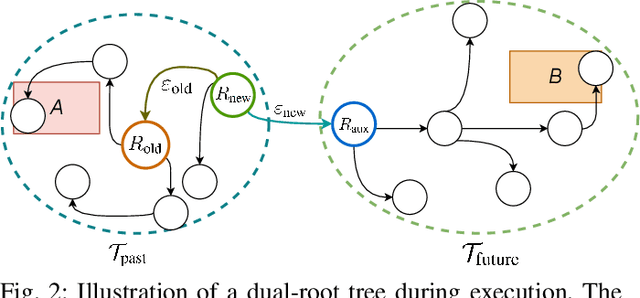
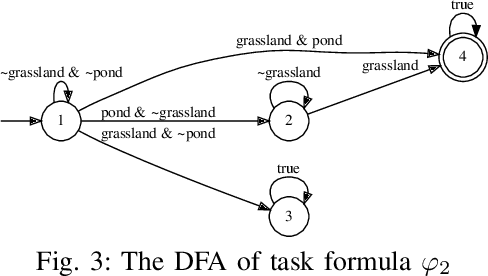
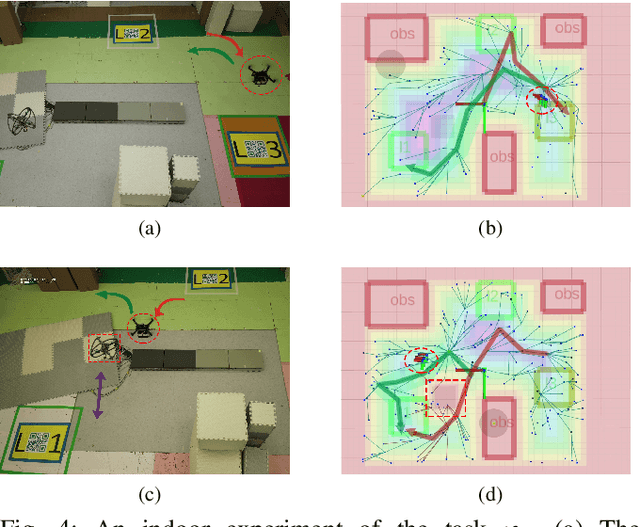
Replanning in temporal logic tasks is extremely difficult during the online execution of robots. This study introduces an effective path planner that computes solutions for temporal logic goals and instantly adapts to non-static and partially unknown environments. Given prior knowledge and a task specification, the planner first identifies an initial feasible solution by growing a sampling-based search tree. While carrying out the computed plan, the robot maintains a solution library to continuously enhance the unfinished part of the plan and store backup plans. The planner updates existing plans when meeting unexpected obstacles or recognizing flaws in prior knowledge. Upon a high-level path is obtained, a trajectory generator tracks the path by dividing it into segments of motion primitives. Our planner is integrated into an autonomous mobile robot system, further deployed on a multicopter with limited onboard processing power. In simulation and real-world experiments, our planner is demonstrated to swiftly and effectively adjust to environmental uncertainties.
Age-Aware Gossiping in Network Topologies
Apr 06, 2023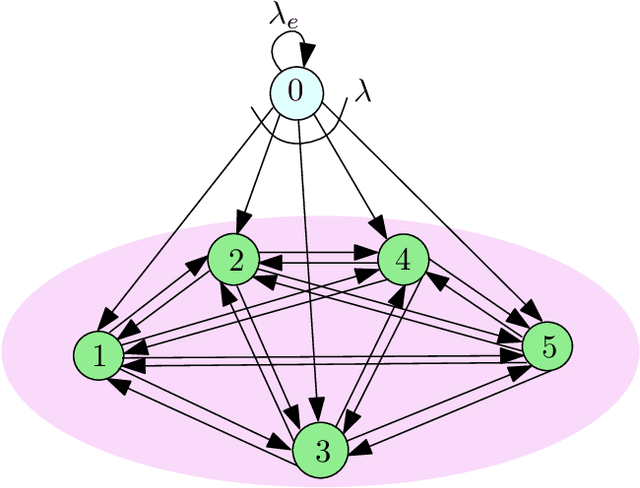
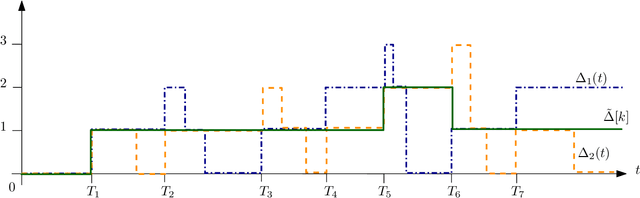
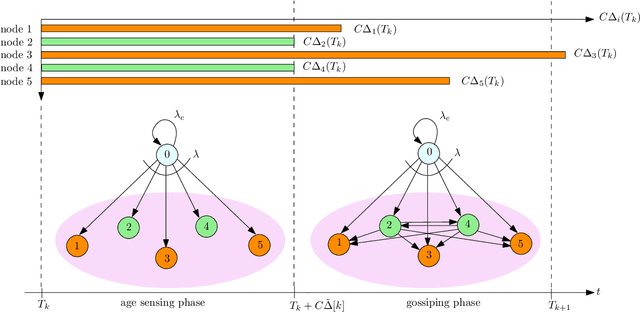
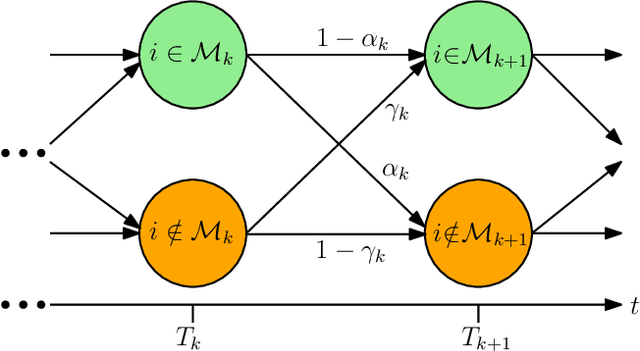
We consider a fully-connected wireless gossip network which consists of a source and $n$ receiver nodes. The source updates itself with a Poisson process and also sends updates to the nodes as Poisson arrivals. Upon receiving the updates, the nodes update their knowledge about the source. The nodes gossip the data among themselves in the form of Poisson arrivals to disperse their knowledge about the source. The total gossiping rate is bounded by a constraint. The goal of the network is to be as timely as possible with the source. We propose a scheme which we coin \emph{age sense updating multiple access in networks (ASUMAN)}, which is a distributed opportunistic gossiping scheme, where after each time the source updates itself, each node waits for a time proportional to its current age and broadcasts a signal to the other nodes of the network. This allows the nodes in the network which have higher age to remain silent and only the low-age nodes to gossip, thus utilizing a significant portion of the constrained total gossip rate. We calculate the average age for a typical node in such a network with symmetric settings, and show that the theoretical upper bound on the age scales as $O(1)$. ASUMAN, with an average age of $O(1)$, offers significant gains compared to a system where the nodes just gossip blindly with a fixed update rate, in which case the age scales as $O(\log n)$. Further, we analyzed the performance of ASUMAN for fractional, finitely connected, sublinear and hierarchical cluster networks. Finally, we show that the $O(1)$ age scaling can be extended to asymmetric settings as well. We give an example of power law arrivals, where nodes' ages scale differently but follow the $O(1)$ bound.
RFAConv: Innovating Spatial Attention and Standard Convolutional Operation
Apr 18, 2023
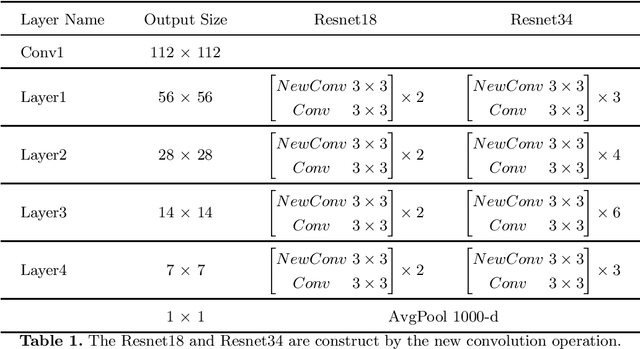
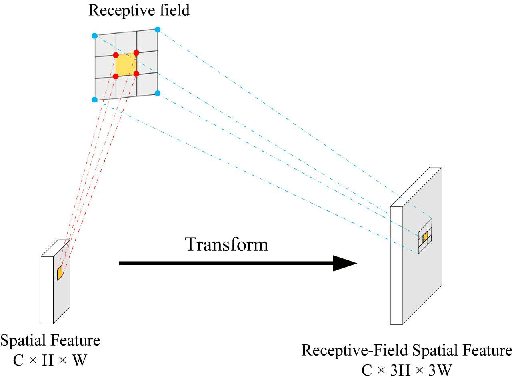
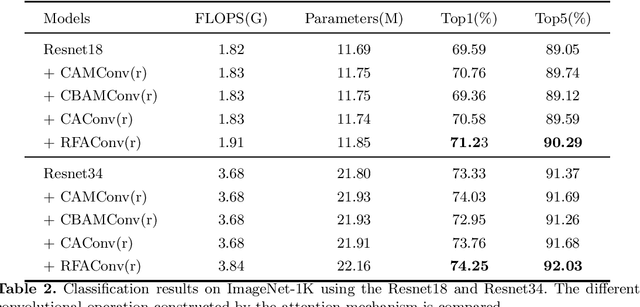
Spatial attention has been widely used to improve the performance of convolutional neural networks. However, it has certain limitations. In this paper, we propose a new perspective on the effectiveness of spatial attention, which is that the spatial attention mechanism essentially solves the problem of convolutional kernel parameter sharing. However, the information contained in the attention map generated by spatial attention is not sufficient for large-size convolutional kernels. Therefore, we propose a novel attention mechanism called Receptive-Field Attention (RFA). Existing spatial attention, such as Convolutional Block Attention Module (CBAM) and Coordinated Attention (CA) focus only on spatial features, which does not fully address the problem of convolutional kernel parameter sharing. In contrast, RFA not only focuses on the receptive-field spatial feature but also provides effective attention weights for large-size convolutional kernels. The Receptive-Field Attention convolutional operation (RFAConv), developed by RFA, represents a new approach to replace the standard convolution operation. It offers nearly negligible increment of computational cost and parameters, while significantly improving network performance. We conducted a series of experiments on ImageNet-1k, COCO, and VOC datasets to demonstrate the superiority of our approach. Of particular importance, we believe that it is time to shift focus from spatial features to receptive-field spatial features for current spatial attention mechanisms. In this way, we can further improve network performance and achieve even better results. The code and pre-trained models for the relevant tasks can be found at https://github.com/Liuchen1997/RFAConv.
Making Thermal Imaging More Equitable and Accurate: Resolving Solar Loading Biases
Apr 18, 2023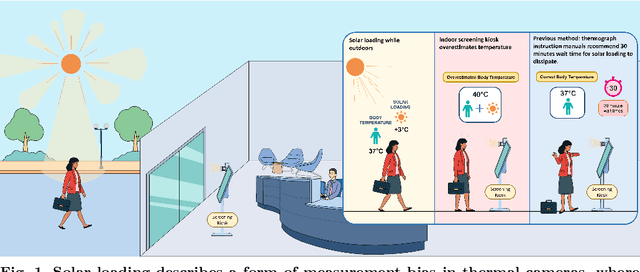
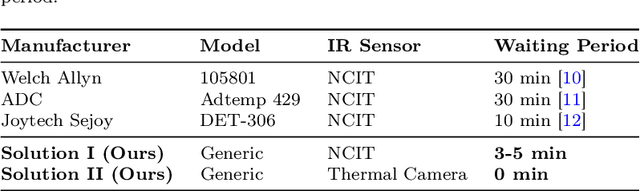
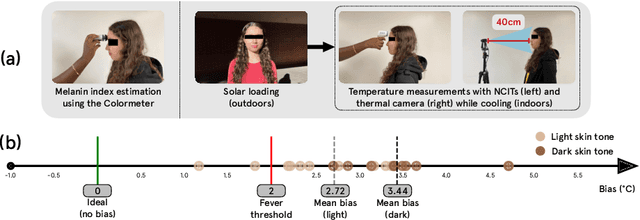
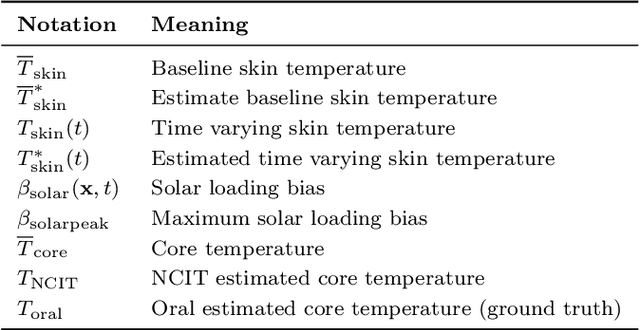
Thermal cameras and thermal point detectors are used to measure the temperature of human skin. These are important devices that are used everyday in clinical and mass screening settings, particularly in an epidemic. Unfortunately, despite the wide use of thermal sensors, the temperature estimates from thermal sensors do not work well in uncontrolled scene conditions. Previous work has studied the effect of wind and other environment factors on skin temperature, but has not considered the heating effect from sunlight, which is termed solar loading. Existing device manufacturers recommend that a subject who has been outdoors in sun re-acclimate to an indoor environment after a waiting period. The waiting period, up to 30 minutes, is insufficient for a rapid screening tool. Moreover, the error bias from solar loading is greater for darker skin tones since melanin absorbs solar radiation. This paper explores two approaches to address this problem. The first approach uses transient behavior of cooling to more quickly extrapolate the steady state temperature. A second approach explores the spatial modulation of solar loading, to propose single-shot correction with a wide-field thermal camera. A real world dataset comprising of thermal point, thermal image, subjective, and objective measurements of melanin is collected with statistical significance for the effect size observed. The single-shot correction scheme is shown to eliminate solar loading bias in the time of a typical frame exposure (33ms).