 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Evaluation of Parameter-based Attacks against Embedded Neural Networks with Laser Injection
Apr 25, 2023
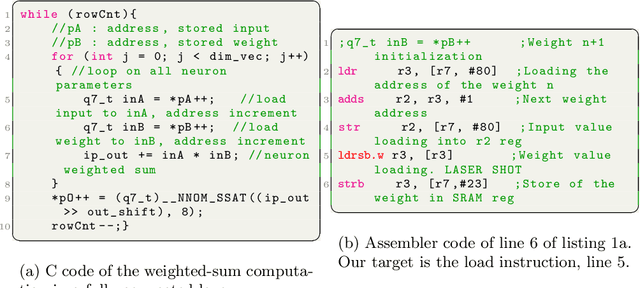
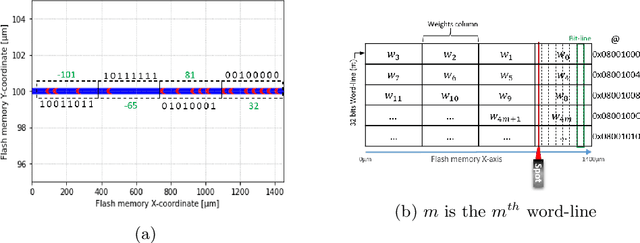
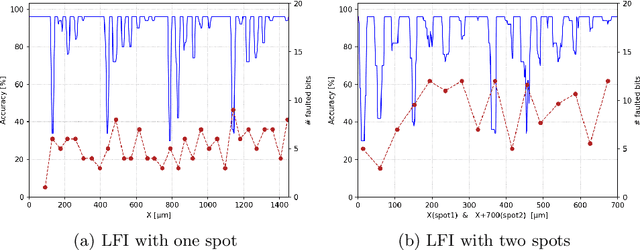
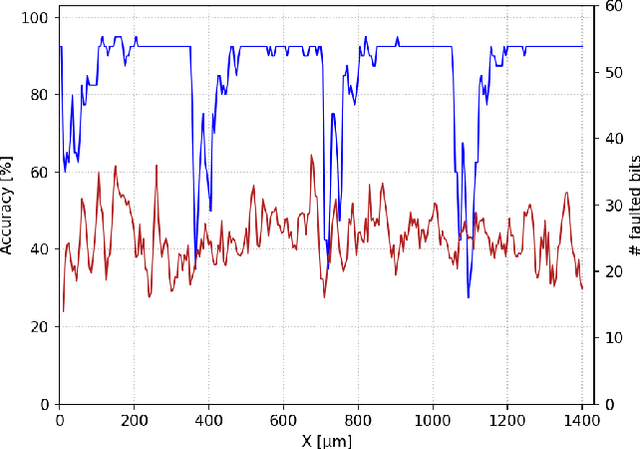
Upcoming certification actions related to the security of machine learning (ML) based systems raise major evaluation challenges that are amplified by the large-scale deployment of models in many hardware platforms. Until recently, most of research works focused on API-based attacks that consider a ML model as a pure algorithmic abstraction. However, new implementation-based threats have been revealed, emphasizing the urgency to propose both practical and simulation-based methods to properly evaluate the robustness of models. A major concern is parameter-based attacks (such as the Bit-Flip Attack, BFA) that highlight the lack of robustness of typical deep neural network models when confronted by accurate and optimal alterations of their internal parameters stored in memory. Setting in a security testing purpose, this work practically reports, for the first time, a successful variant of the BFA on a 32-bit Cortex-M microcontroller using laser fault injection. It is a standard fault injection means for security evaluation, that enables to inject spatially and temporally accurate faults. To avoid unrealistic brute-force strategies, we show how simulations help selecting the most sensitive set of bits from the parameters taking into account the laser fault model.
Precision Spectroscopy of Fast, Hot Exotic Isotopes Using Machine Learning Assisted Event-by-Event Doppler Correction
Apr 25, 2023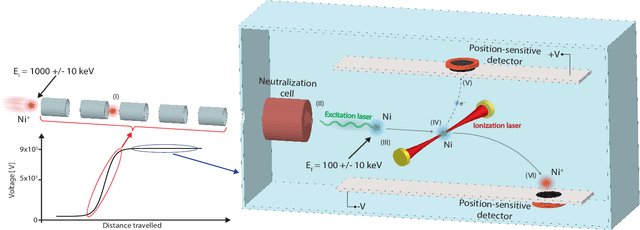
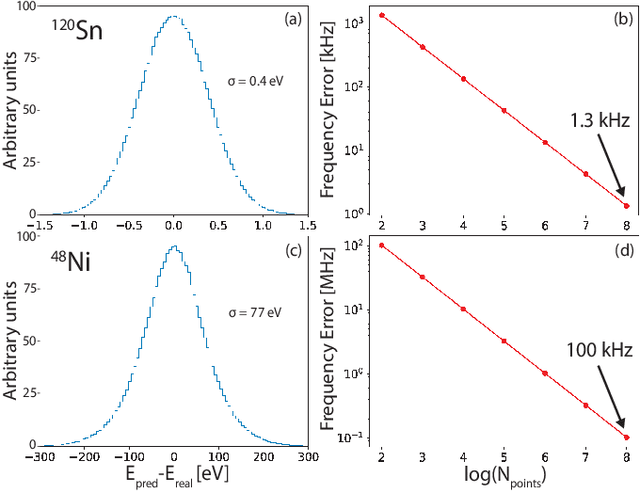
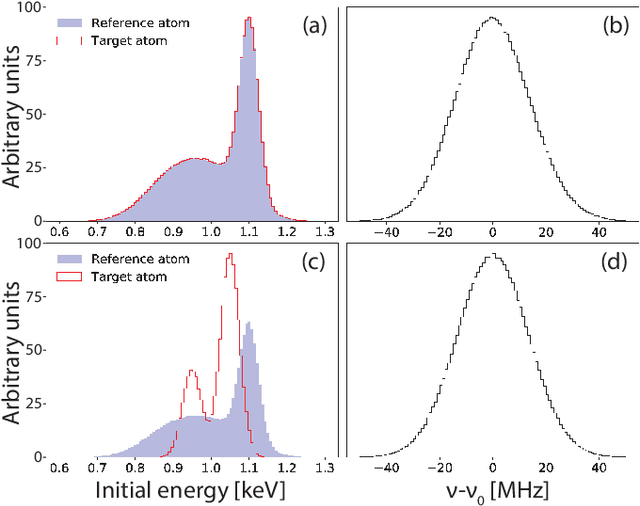
We propose an experimental scheme for performing sensitive, high-precision laser spectroscopy studies on fast exotic isotopes. By inducing a step-wise resonant ionization of the atoms travelling inside an electric field and subsequently detecting the ion and the corresponding electron, time- and position-sensitive measurements of the resulting particles can be performed. Using a Mixture Density Network (MDN), we can leverage this information to predict the initial energy of individual atoms and thus apply a Doppler correction of the observed transition frequencies on an event-by-event basis. We conduct numerical simulations of the proposed experimental scheme and show that kHz-level uncertainties can be achieved for ion beams produced at extreme temperatures ($> 10^8$ K), with energy spreads as large as $10$ keV and non-uniform velocity distributions. The ability to perform in-flight spectroscopy, directly on highly energetic beams, offers unique opportunities to studying short-lived isotopes with lifetimes in the millisecond range and below, produced in low quantities, in hot and highly contaminated environments, without the need for cooling techniques. Such species are of marked interest for nuclear structure, astrophysics, and new physics searches.
MAWSEO: Adversarial Wiki Search Poisoning for Illicit Online Promotion
Apr 22, 2023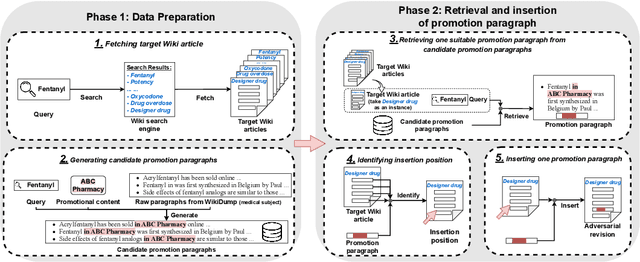
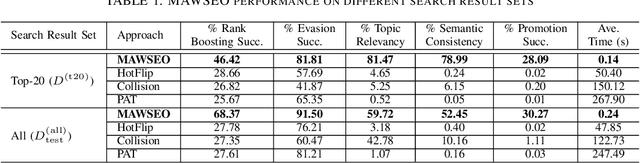
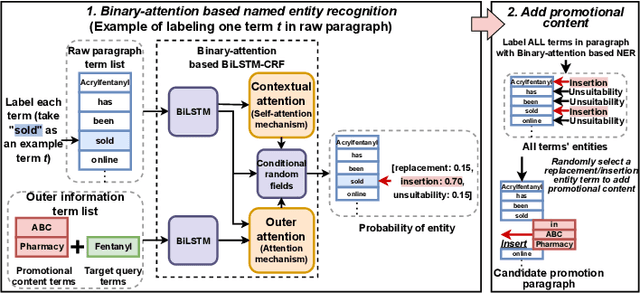
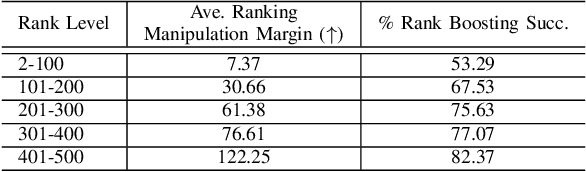
As a prominent instance of vandalism edits, Wiki search poisoning for illicit promotion is a cybercrime in which the adversary aims at editing Wiki articles to promote illicit businesses through Wiki search results of relevant queries. In this paper, we report a study that, for the first time, shows that such stealthy blackhat SEO on Wiki can be automated. Our technique, called MAWSEO, employs adversarial revisions to achieve real-world cybercriminal objectives, including rank boosting, vandalism detection evasion, topic relevancy, semantic consistency, user awareness (but not alarming) of promotional content, etc. Our evaluation and user study demonstrate that MAWSEO is able to effectively and efficiently generate adversarial vandalism edits, which can bypass state-of-the-art built-in Wiki vandalism detectors, and also get promotional content through to Wiki users without triggering their alarms. In addition, we investigated potential defense, including coherence based detection and adversarial training of vandalism detection, against our attack in the Wiki ecosystem.
TimelyFL: Heterogeneity-aware Asynchronous Federated Learning with Adaptive Partial Training
Apr 14, 2023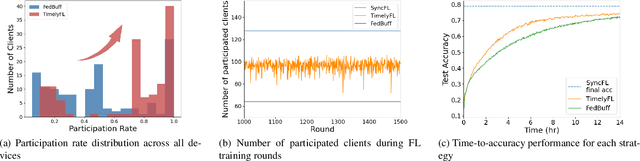
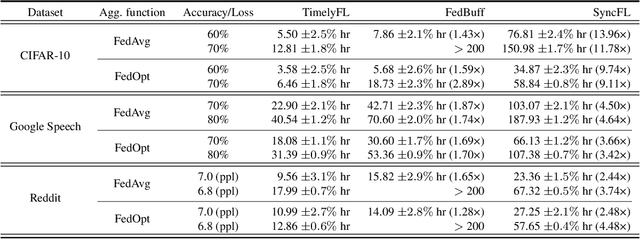
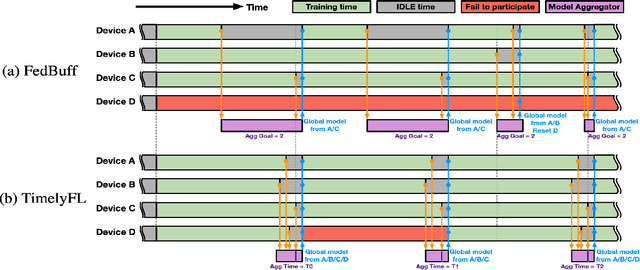

In cross-device Federated Learning (FL) environments, scaling synchronous FL methods is challenging as stragglers hinder the training process. Moreover, the availability of each client to join the training is highly variable over time due to system heterogeneities and intermittent connectivity. Recent asynchronous FL methods (e.g., FedBuff) have been proposed to overcome these issues by allowing slower users to continue their work on local training based on stale models and to contribute to aggregation when ready. However, we show empirically that this method can lead to a substantial drop in training accuracy as well as a slower convergence rate. The primary reason is that fast-speed devices contribute to many more rounds of aggregation while others join more intermittently or not at all, and with stale model updates. To overcome this barrier, we propose TimelyFL, a heterogeneity-aware asynchronous FL framework with adaptive partial training. During the training, TimelyFL adjusts the local training workload based on the real-time resource capabilities of each client, aiming to allow more available clients to join in the global update without staleness. We demonstrate the performance benefits of TimelyFL by conducting extensive experiments on various datasets (e.g., CIFAR-10, Google Speech, and Reddit) and models (e.g., ResNet20, VGG11, and ALBERT). In comparison with the state-of-the-art (i.e., FedBuff), our evaluations reveal that TimelyFL improves participation rate by 21.13%, harvests 1.28x - 2.89x more efficiency on convergence rate, and provides a 6.25% increment on test accuracy.
Modelling customer churn for the retail industry in a deep learning based sequential framework
Apr 02, 2023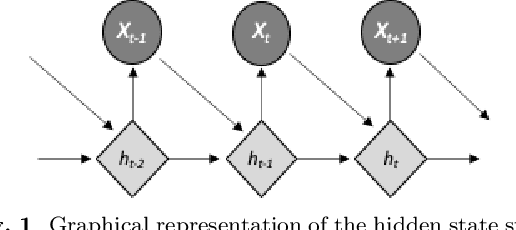
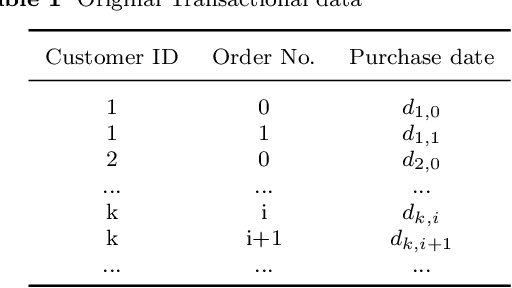
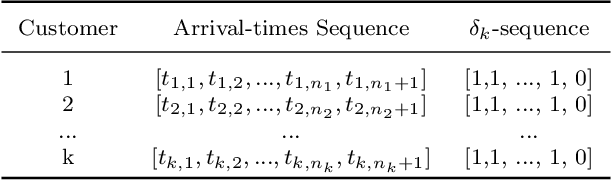
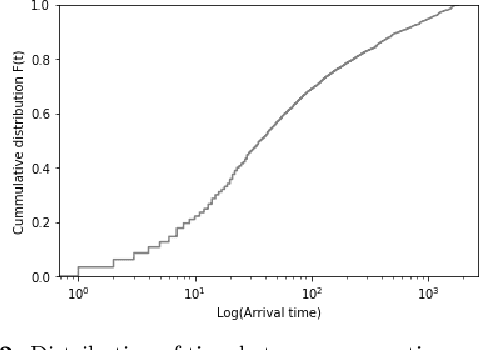
As retailers around the world increase efforts in developing targeted marketing campaigns for different audiences, predicting accurately which customers are most likely to churn ahead of time is crucial for marketing teams in order to increase business profits. This work presents a deep survival framework to predict which customers are at risk of stopping to purchase with retail companies in non-contractual settings. By leveraging the survival model parameters to be learnt by recurrent neural networks, we are able to obtain individual level survival models for purchasing behaviour based only on individual customer behaviour and avoid time-consuming feature engineering processes usually done when training machine learning models.
One Explanation Does Not Fit XIL
Apr 14, 2023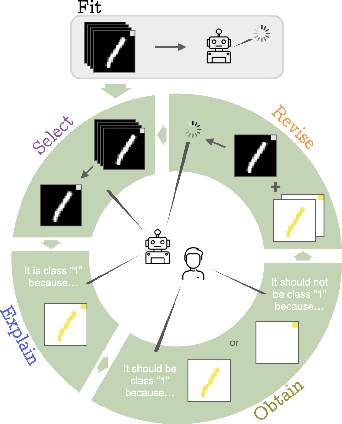
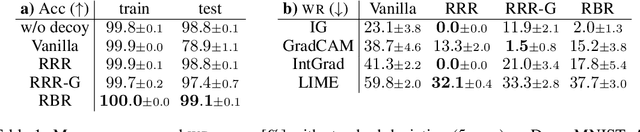
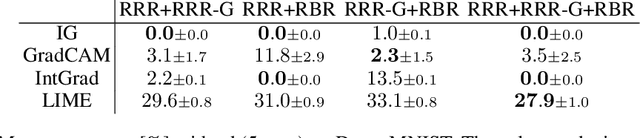
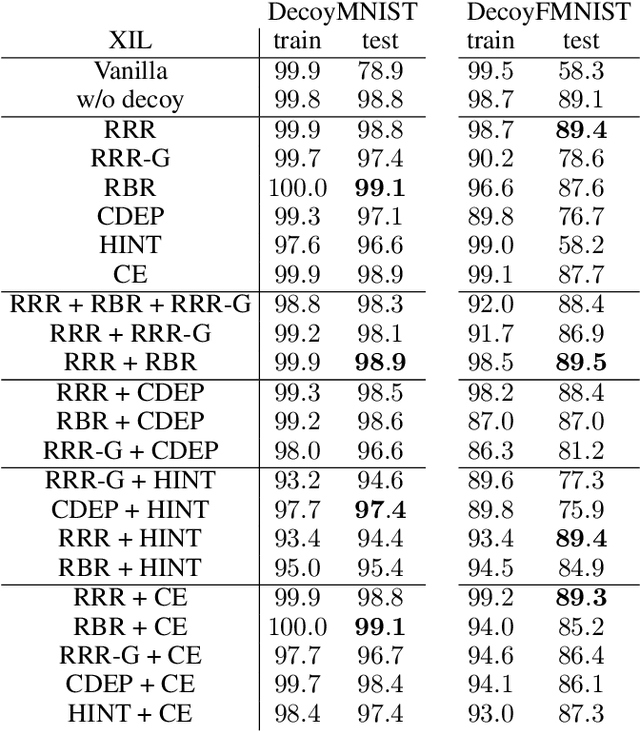
Current machine learning models produce outstanding results in many areas but, at the same time, suffer from shortcut learning and spurious correlations. To address such flaws, the explanatory interactive machine learning (XIL) framework has been proposed to revise a model by employing user feedback on a model's explanation. This work sheds light on the explanations used within this framework. In particular, we investigate simultaneous model revision through multiple explanation methods. To this end, we identified that \textit{one explanation does not fit XIL} and propose considering multiple ones when revising models via XIL.
BoDiffusion: Diffusing Sparse Observations for Full-Body Human Motion Synthesis
Apr 21, 2023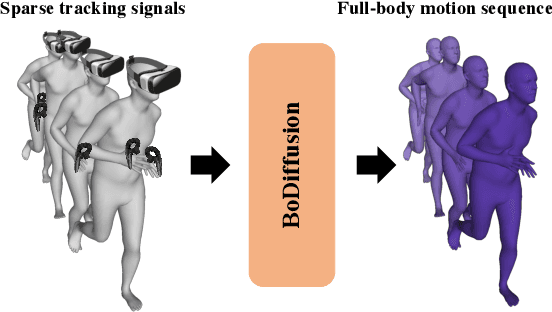

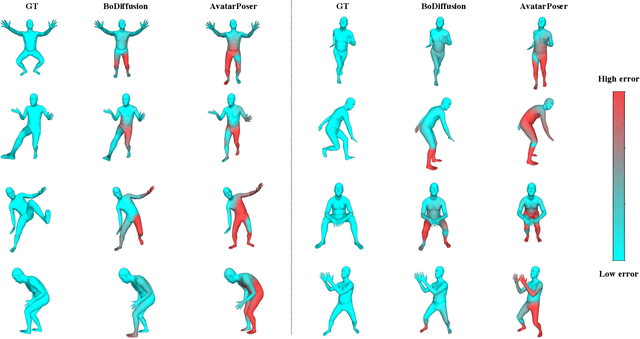
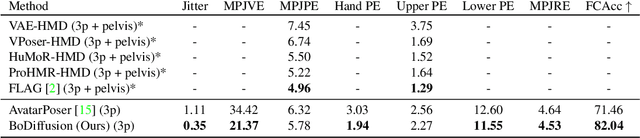
Mixed reality applications require tracking the user's full-body motion to enable an immersive experience. However, typical head-mounted devices can only track head and hand movements, leading to a limited reconstruction of full-body motion due to variability in lower body configurations. We propose BoDiffusion -- a generative diffusion model for motion synthesis to tackle this under-constrained reconstruction problem. We present a time and space conditioning scheme that allows BoDiffusion to leverage sparse tracking inputs while generating smooth and realistic full-body motion sequences. To the best of our knowledge, this is the first approach that uses the reverse diffusion process to model full-body tracking as a conditional sequence generation task. We conduct experiments on the large-scale motion-capture dataset AMASS and show that our approach outperforms the state-of-the-art approaches by a significant margin in terms of full-body motion realism and joint reconstruction error.
Consensus Complementarity Control for Multi-Contact MPC
Apr 21, 2023
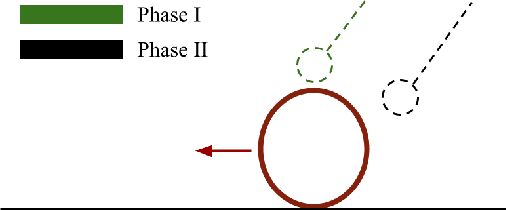
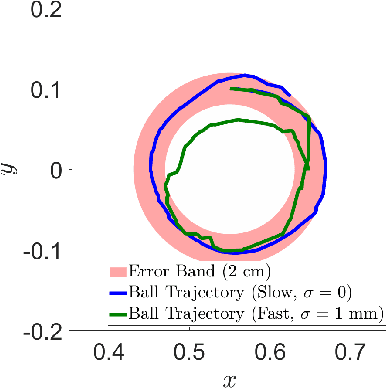
We propose a hybrid model predictive control algorithm, consensus complementarity control (C3), for systems that make and break contact with their environment. Many state-of-the-art controllers for tasks which require initiating contact with the environment, such as locomotion and manipulation, require a priori mode schedules or are too computationally complex to run at real-time rates. We present a method based on the alternating direction method of multipliers (ADMM) that is capable of high-speed reasoning over potential contact events. Via a consensus formulation, our approach enables parallelization of the contact scheduling problem. We validate our results on five numerical examples, including four high-dimensional frictional contact problems, and a physical experimentation on an underactuated multi-contact system. We further demonstrate the effectiveness of our method on a physical experiment accomplishing a high-dimensional, multi-contact manipulation task with a robot arm.
Generative AI Perceptions: A Survey to Measure the Perceptions of Faculty, Staff, and Students on Generative AI Tools in Academia
Apr 21, 2023
ChatGPT is a natural language processing tool that can engage in human-like conversations and generate coherent and contextually relevant responses to various prompts. ChatGPT is capable of understanding natural text that is input by a user and generating appropriate responses in various forms. This tool represents a major step in how humans are interacting with technology. This paper specifically focuses on how ChatGPT is revolutionizing the realm of engineering education and the relationship between technology, students, and faculty and staff. Because this tool is quickly changing and improving with the potential for even greater future capability, it is a critical time to collect pertinent data. A survey was created to measure the effects of ChatGPT on students, faculty, and staff. This survey is shared as a Texas A&M University technical report to allow other universities and entities to use this survey and measure the effects elsewhere.
Towards Automated 3D Search Planning for Emergency Response Missions
Apr 07, 2023The ability to efficiently plan and execute automated and precise search missions using unmanned aerial vehicles (UAVs) during emergency response situations is imperative. Precise navigation between obstacles and time-efficient searching of 3D structures and buildings are essential for locating survivors and people in need in emergency response missions. In this work we address this challenging problem by proposing a unified search planning framework that automates the process of UAV-based search planning in 3D environments. Specifically, we propose a novel search planning framework which enables automated planning and execution of collision-free search trajectories in 3D by taking into account low-level mission constrains (e.g., the UAV dynamical and sensing model), mission objectives (e.g., the mission execution time and the UAV energy efficiency) and user-defined mission specifications (e.g., the 3D structures to be searched and minimum detection probability constraints). The capabilities and performance of the proposed approach are demonstrated through extensive simulated 3D search scenarios.
* Journal of Intelligent & Robotic Systems 103.1 (2021): 2