 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Direct LiDAR-Inertial Odometry and Mapping: Perceptive and Connective SLAM
May 03, 2023
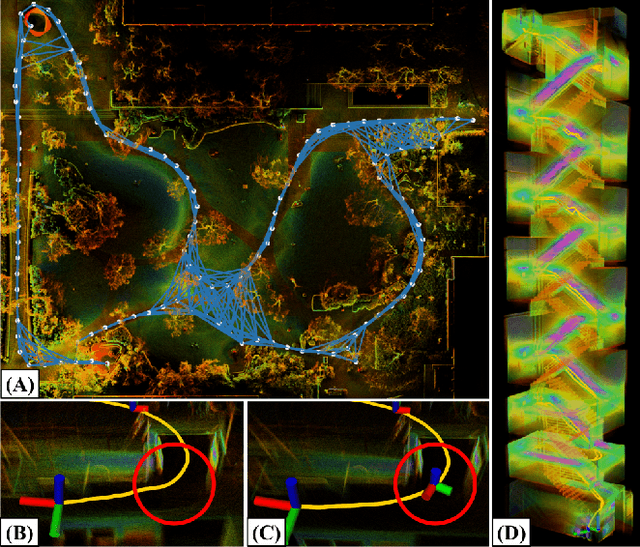
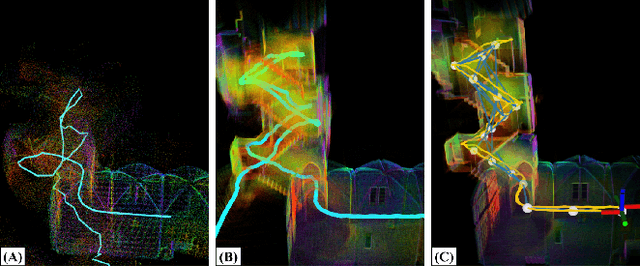

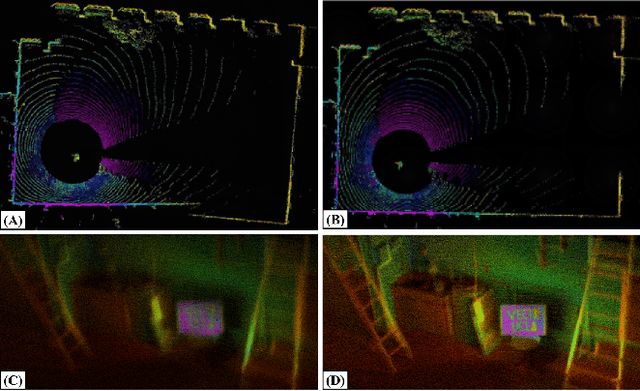
This paper presents Direct LiDAR-Inertial Odometry and Mapping (DLIOM), a robust SLAM algorithm with an explicit focus on computational efficiency, operational reliability, and real-world efficacy. DLIOM contains several key algorithmic innovations in both the front-end and back-end subsystems to design a resilient LiDAR-inertial architecture that is perceptive to the environment and produces accurate localization and high-fidelity 3D mapping for autonomous robotic platforms. Our ideas spawned after a deep investigation into modern LiDAR SLAM systems and their inabilities to generalize across different operating environments, in which we address several common algorithmic failure points by means of proactive safe-guards to provide long-term operational reliability in the unstructured real world. We detail several important innovations to localization accuracy and mapping resiliency distributed throughout a typical LiDAR SLAM pipeline to comprehensively increase algorithmic speed, accuracy, and robustness. In addition, we discuss insights gained from our ground-up approach while implementing such a complex system for real-time state estimation on resource-constrained systems, and we experimentally show the increased performance of our method as compared to the current state-of-the-art on both public benchmark and self-collected datasets.
Joint A-SNN: Joint Training of Artificial and Spiking Neural Networks via Self-Distillation and Weight Factorization
May 03, 2023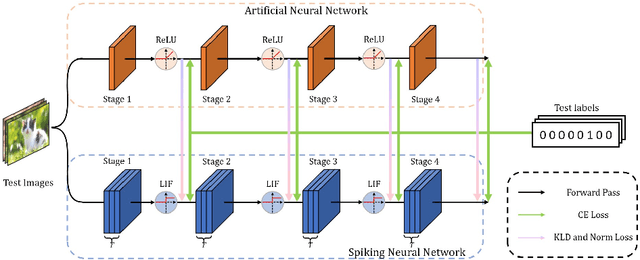
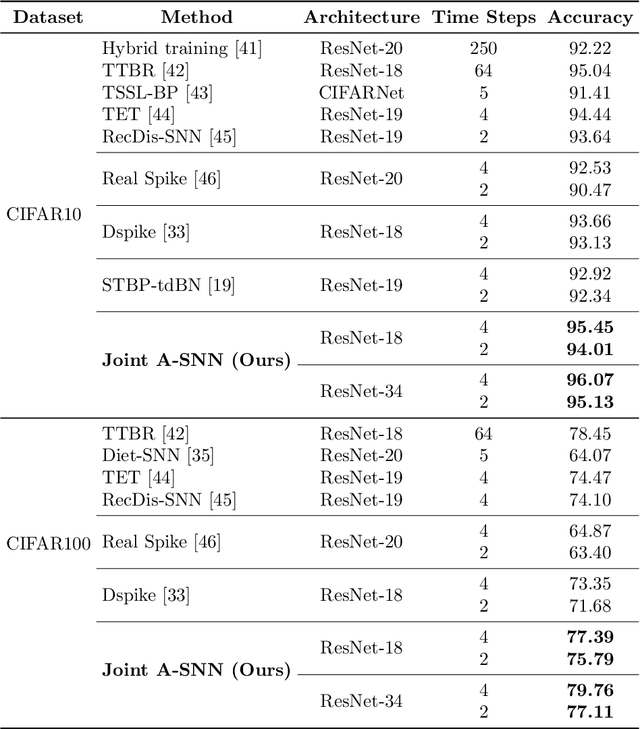
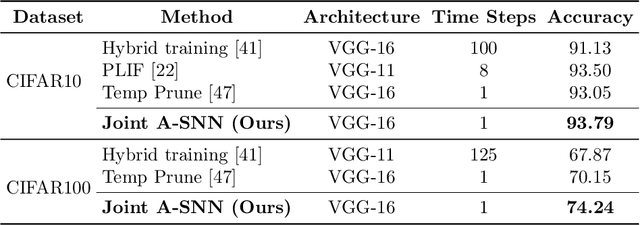
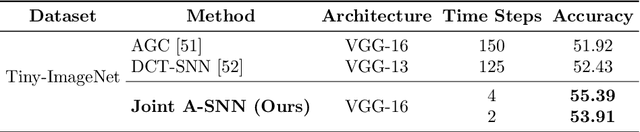
Emerged as a biology-inspired method, Spiking Neural Networks (SNNs) mimic the spiking nature of brain neurons and have received lots of research attention. SNNs deal with binary spikes as their activation and therefore derive extreme energy efficiency on hardware. However, it also leads to an intrinsic obstacle that training SNNs from scratch requires a re-definition of the firing function for computing gradient. Artificial Neural Networks (ANNs), however, are fully differentiable to be trained with gradient descent. In this paper, we propose a joint training framework of ANN and SNN, in which the ANN can guide the SNN's optimization. This joint framework contains two parts: First, the knowledge inside ANN is distilled to SNN by using multiple branches from the networks. Second, we restrict the parameters of ANN and SNN, where they share partial parameters and learn different singular weights. Extensive experiments over several widely used network structures show that our method consistently outperforms many other state-of-the-art training methods. For example, on the CIFAR100 classification task, the spiking ResNet-18 model trained by our method can reach to 77.39% top-1 accuracy with only 4 time steps.
Gradient-based Maximally Interfered Retrieval for Domain Incremental 3D Object Detection
May 03, 2023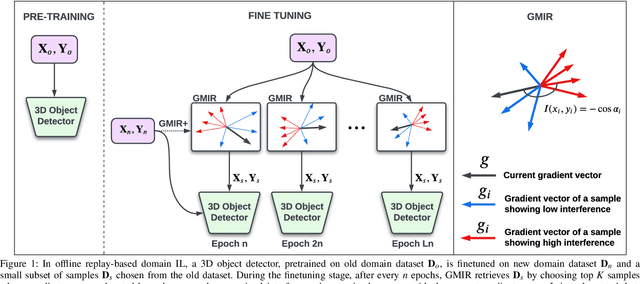
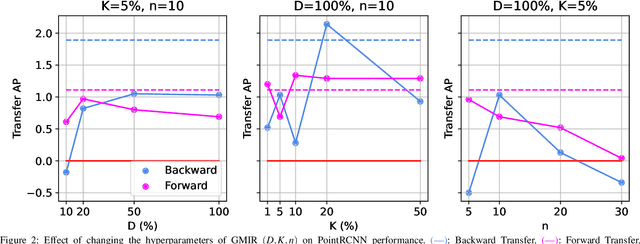
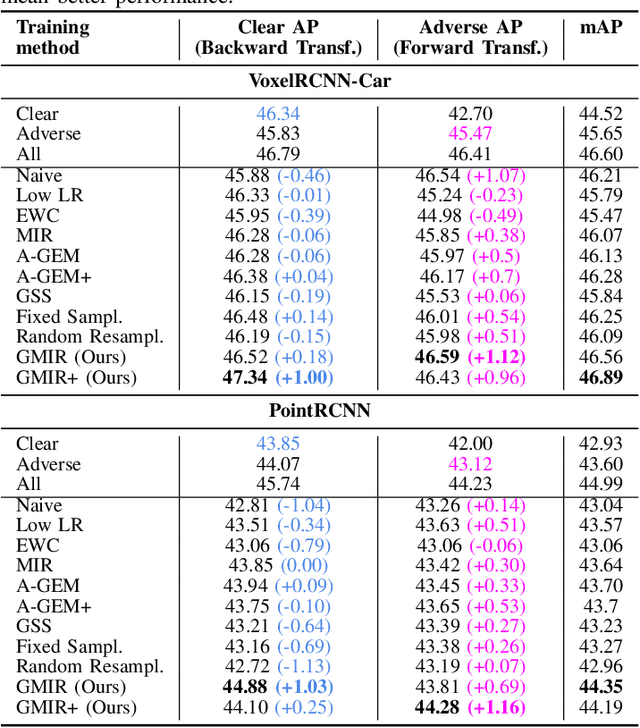
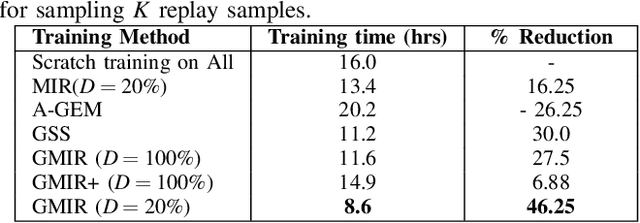
Accurate 3D object detection in all weather conditions remains a key challenge to enable the widespread deployment of autonomous vehicles, as most work to date has been performed on clear weather data. In order to generalize to adverse weather conditions, supervised methods perform best if trained from scratch on all weather data instead of finetuning a model pretrained on clear weather data. Training from scratch on all data will eventually become computationally infeasible and expensive as datasets continue to grow and encompass the full extent of possible weather conditions. On the other hand, naive finetuning on data from a different weather domain can result in catastrophic forgetting of the previously learned domain. Inspired by the success of replay-based continual learning methods, we propose Gradient-based Maximally Interfered Retrieval (GMIR), a gradient based sampling strategy for replay. During finetuning, GMIR periodically retrieves samples from the previous domain dataset whose gradient vectors show maximal interference with the gradient vector of the current update. Our 3D object detection experiments on the SeeingThroughFog (STF) dataset show that GMIR not only overcomes forgetting but also offers competitive performance compared to scratch training on all data with a 46.25% reduction in total training time.
Bicubic++: Slim, Slimmer, Slimmest -- Designing an Industry-Grade Super-Resolution Network
May 03, 2023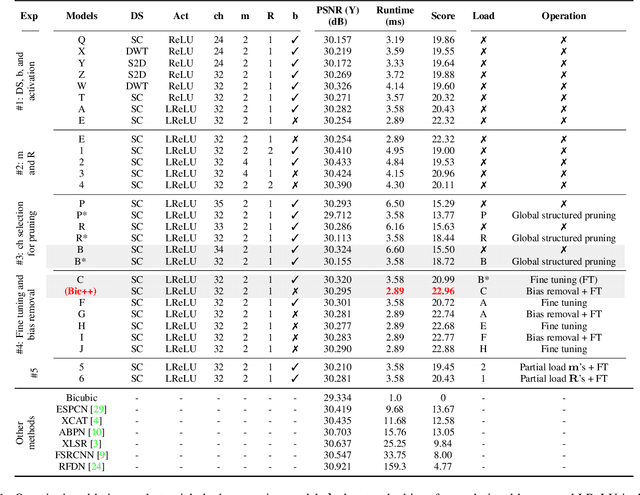
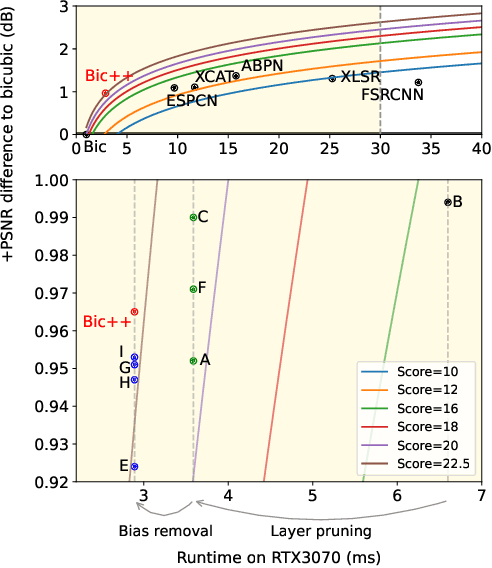
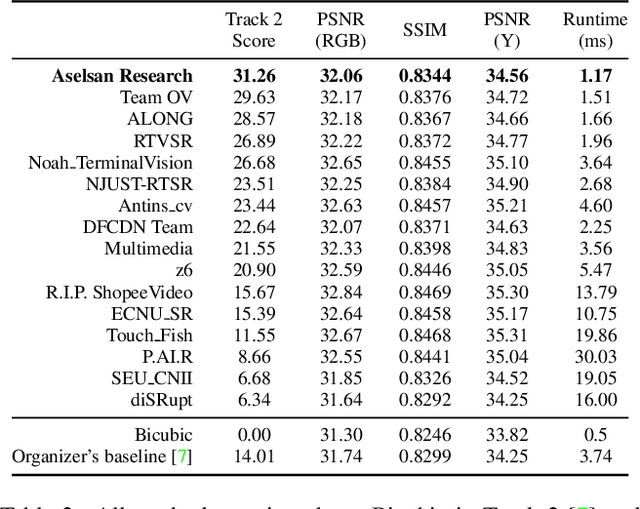
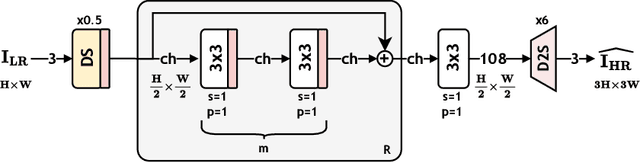
We propose a real-time and lightweight single-image super-resolution (SR) network named Bicubic++. Despite using spatial dimensions of the input image across the whole network, Bicubic++ first learns quick reversible downgraded and lower resolution features of the image in order to decrease the number of computations. We also construct a training pipeline, where we apply an end-to-end global structured pruning of convolutional layers without using metrics like magnitude and gradient norms, and focus on optimizing the pruned network's PSNR on the validation set. Furthermore, we have experimentally shown that the bias terms take considerable amount of the runtime while increasing PSNR marginally, hence we have also applied bias removal to the convolutional layers. Our method adds ~1dB on Bicubic upscaling PSNR for all tested SR datasets and runs with ~1.17ms on RTX3090 and ~2.9ms on RTX3070, for 720p inputs and 4K outputs, both in FP16 precision. Bicubic++ won NTIRE 2023 RTSR Track 2 x3 SR competition and is the fastest among all competitive methods. Being almost as fast as the standard Bicubic upsampling method, we believe that Bicubic++ can set a new industry standard.
Wavelet Coherence Of Total Solar Irradiance and Atlantic Climate
May 03, 2023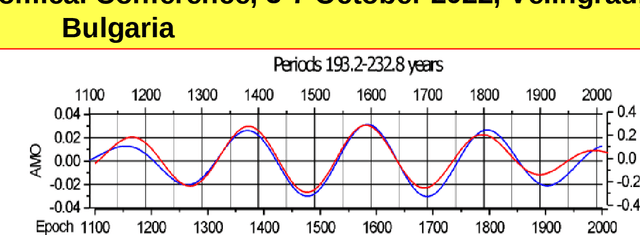
The oscillations of climatic parameters of North Atlantic Ocean play important role in various events in North America and Europe. Several climatic indices are associated with these oscillations. The long term Atlantic temperature anomalies are described by the Atlantic Multidecadal Oscillation (AMO). The Atlantic Multidecadal Oscillation also known as Atlantic Multidecadal Variability (AMV), is the variability of the sea surface temperature (SST) of the North Atlantic Ocean at the timescale of several decades. The AMO is correlated to air temperatures and rainfall over much of the Northern Hemisphere, in particular in the summer climate in North America and Europe. The long-term variations of surface temperature are driven mainly by the cycles of solar activity, represented by the variations of the Total Solar Irradiance (TSI). The frequency and amplitude dependences between the TSI and AMO are analyzed by wavelet coherence of millennial time series since 800 AD till now. The results of wavelet coherence are compared with the detected common solar and climate cycles in narrow frequency bands by the method of Partial Fourier Approximation. The long-term coherence between TSI and AMO can help to understand better the recent climate change and can improve the long term forecast.
* pages 12, Proceedings of the XIII Bulgarian-Serbian Astronomical Conference (XIII BSAC), Velingrad, Bulgaria, 2022
A Systematic Study on Object Recognition Using Millimeter-wave Radar
May 03, 2023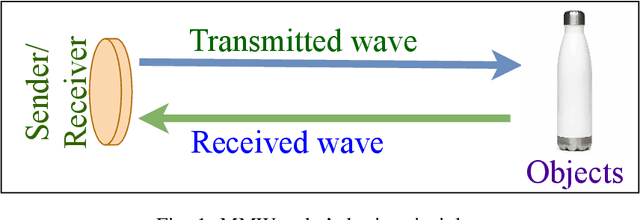
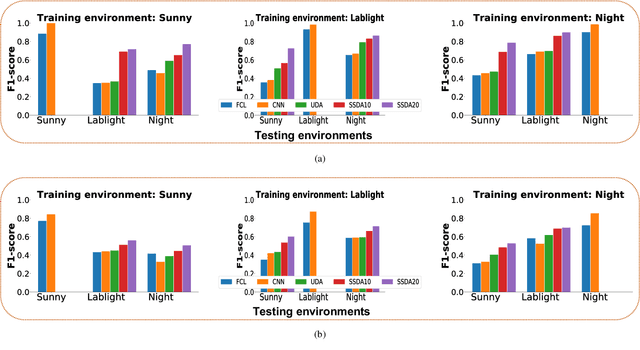
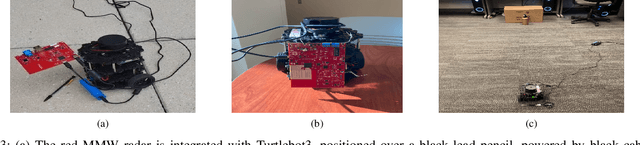
Due to its light and weather-independent sensing, millimeter-wave (MMW) radar is essential in smart environments. Intelligent vehicle systems and industry-grade MMW radars have integrated such capabilities. Industry-grade MMW radars are expensive and hard to get for community-purpose smart environment applications. However, commercially available MMW radars have hidden underpinning challenges that need to be investigated for tasks like recognizing objects and activities, real-time person tracking, object localization, etc. Image and video data are straightforward to gather, understand, and annotate for such jobs. Image and video data are light and weather-dependent, susceptible to the occlusion effect, and present privacy problems. To eliminate dependence and ensure privacy, commercial MMW radars should be tested. MMW radar's practicality and performance in varied operating settings must be addressed before promoting it. To address the problems, we collected a dataset using Texas Instruments' Automotive mmWave Radar (AWR2944) and reported the best experimental settings for object recognition performance using different deep learning algorithms. Our extensive data gathering technique allows us to systematically explore and identify object identification task problems under cross-ambience conditions. We investigated several solutions and published detailed experimental data.
Gamifying Math Education using Object Detection
Apr 13, 2023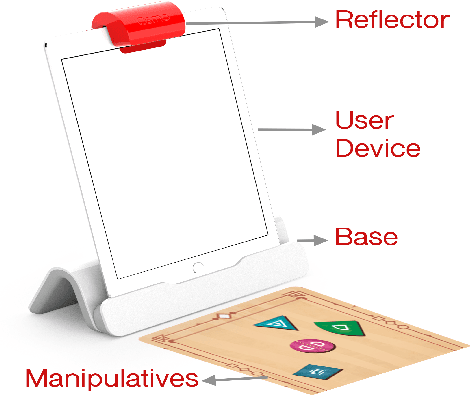
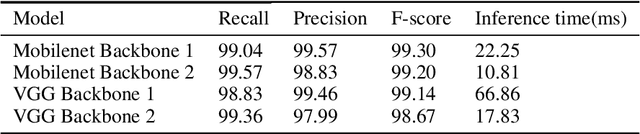
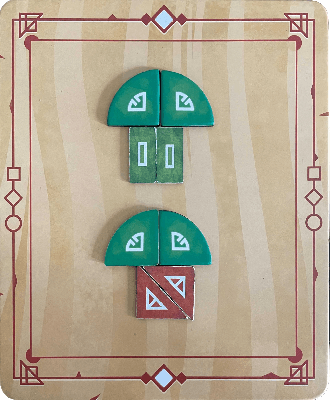
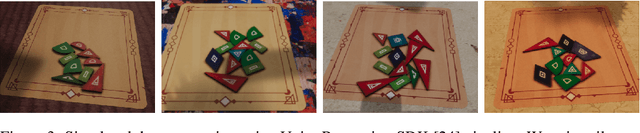
Manipulatives used in the right way help improve mathematical concepts leading to better learning outcomes. In this paper, we present a phygital (physical + digital) curriculum inspired teaching system for kids aged 5-8 to learn geometry using shape tile manipulatives. Combining smaller shapes to form larger ones is an important skill kids learn early on which requires shape tiles to be placed close to each other in the play area. This introduces a challenge of oriented object detection for densely packed objects with arbitrary orientations. Leveraging simulated data for neural network training and light-weight mobile architectures, we enable our system to understand user interactions and provide real-time audiovisual feedback. Experimental results show that our network runs real-time with high precision/recall on consumer devices, thereby providing a consistent and enjoyable learning experience.
Two-phase Dual COPOD Method for Anomaly Detection in Industrial Control System
Apr 30, 2023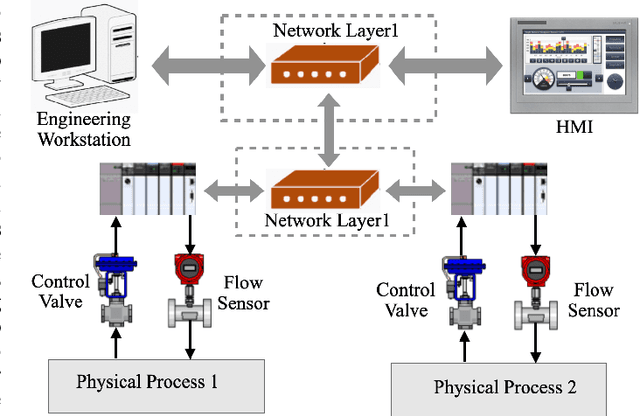
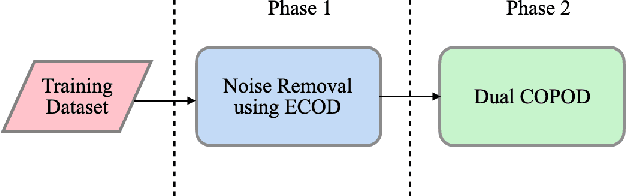
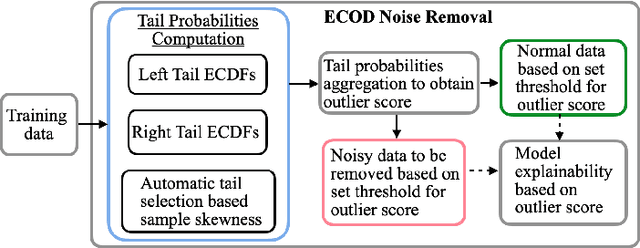
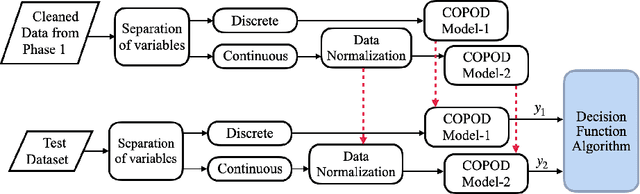
Critical infrastructures like water treatment facilities and power plants depend on industrial control systems (ICS) for monitoring and control, making them vulnerable to cyber attacks and system malfunctions. Traditional ICS anomaly detection methods lack transparency and interpretability, which make it difficult for practitioners to understand and trust the results. This paper proposes a two-phase dual Copula-based Outlier Detection (COPOD) method that addresses these challenges. The first phase removes unwanted outliers using an empirical cumulative distribution algorithm, and the second phase develops two parallel COPOD models based on the output data of phase 1. The method is based on empirical distribution functions, parameter-free, and provides interpretability by quantifying each feature's contribution to an anomaly. The method is also computationally and memory-efficient, suitable for low- and high-dimensional datasets. Experimental results demonstrate superior performance in terms of F1-score and recall on three open-source ICS datasets, enabling real-time ICS anomaly detection.
NewsPanda: Media Monitoring for Timely Conservation Action
Apr 30, 2023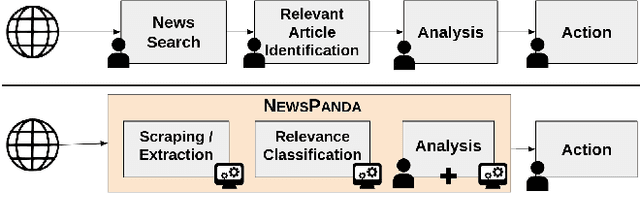
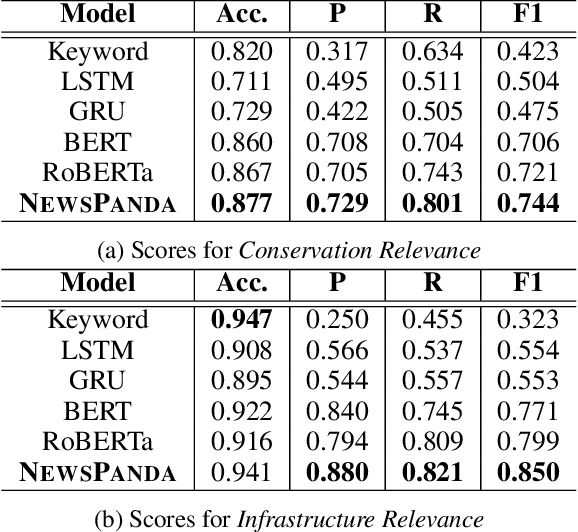
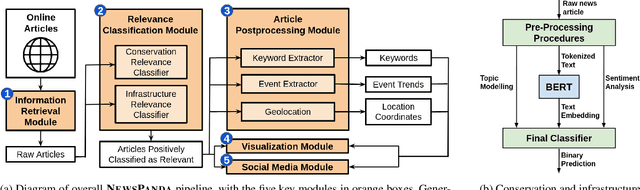
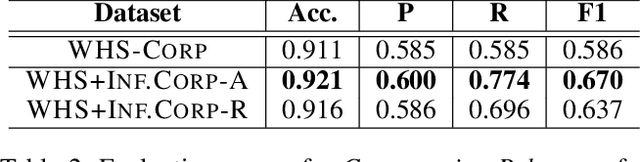
Non-governmental organizations for environmental conservation have a significant interest in monitoring conservation-related media and getting timely updates about infrastructure construction projects as they may cause massive impact to key conservation areas. Such monitoring, however, is difficult and time-consuming. We introduce NewsPanda, a toolkit which automatically detects and analyzes online articles related to environmental conservation and infrastructure construction. We fine-tune a BERT-based model using active learning methods and noise correction algorithms to identify articles that are relevant to conservation and infrastructure construction. For the identified articles, we perform further analysis, extracting keywords and finding potentially related sources. NewsPanda has been successfully deployed by the World Wide Fund for Nature teams in the UK, India, and Nepal since February 2022. It currently monitors over 80,000 websites and 1,074 conservation sites across India and Nepal, saving more than 30 hours of human efforts weekly. We have now scaled it up to cover 60,000 conservation sites globally.
Self-Supervised Mental Disorder Classifiers via Time Reversal
Nov 30, 2022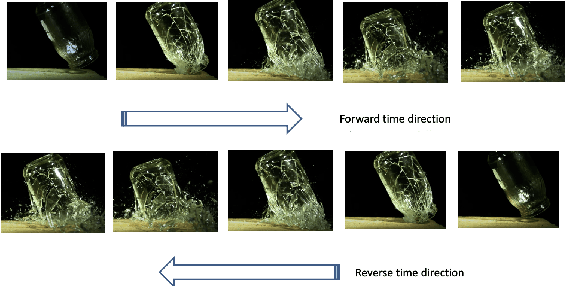
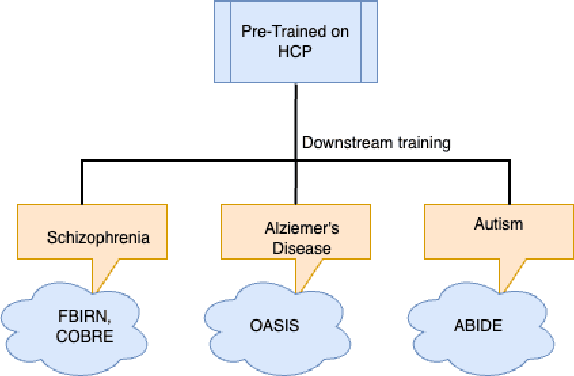
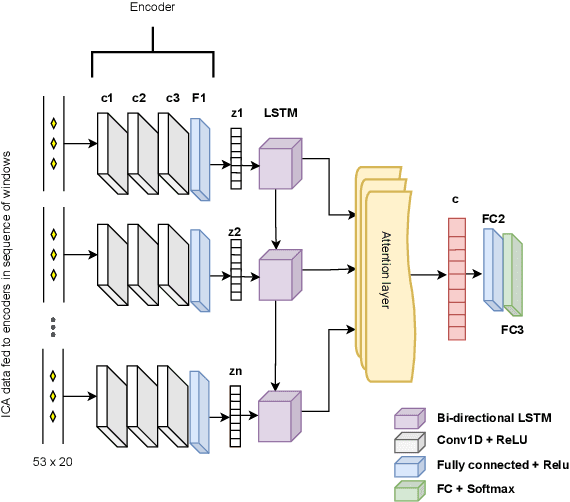
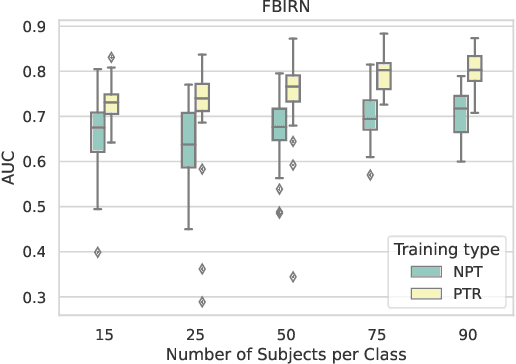
Data scarcity is a notable problem, especially in the medical domain, due to patient data laws. Therefore, efficient Pre-Training techniques could help in combating this problem. In this paper, we demonstrate that a model trained on the time direction of functional neuro-imaging data could help in any downstream task, for example, classifying diseases from healthy controls in fMRI data. We train a Deep Neural Network on Independent components derived from fMRI data using the Independent component analysis (ICA) technique. It learns time direction in the ICA-based data. This pre-trained model is further trained to classify brain disorders in different datasets. Through various experiments, we have shown that learning time direction helps a model learn some causal relation in fMRI data that helps in faster convergence, and consequently, the model generalizes well in downstream classification tasks even with fewer data records.