 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Toward Fine Contact Interactions: Learning to Control Normal Contact Force with Limited Information
May 29, 2023
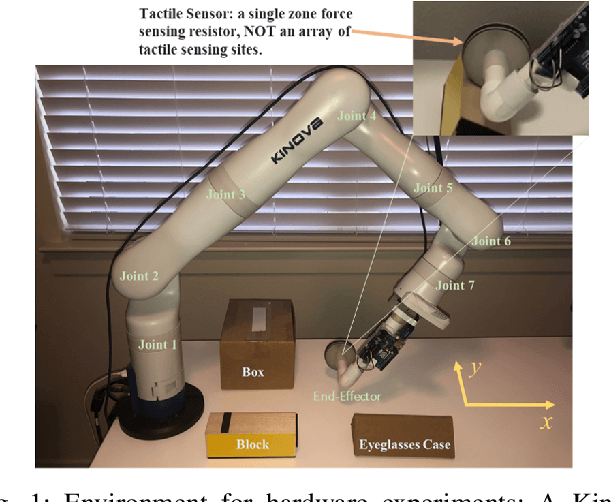
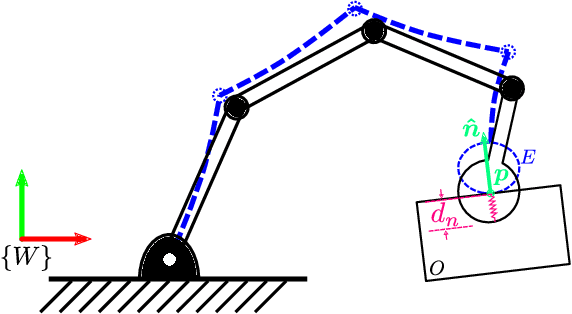
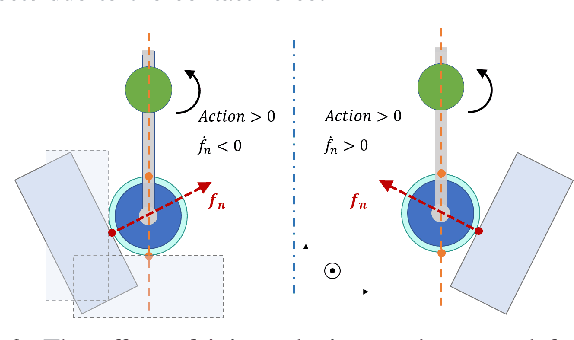
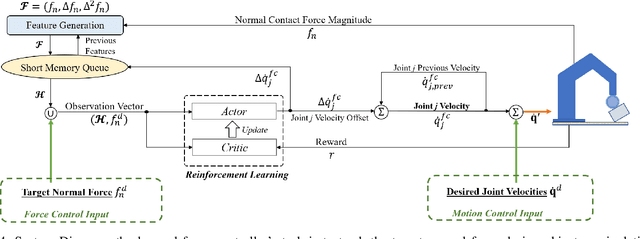
Dexterous manipulation of objects through fine control of physical contacts is essential for many important tasks of daily living. A fundamental ability underlying fine contact control is compliant control, \textit{i.e.}, controlling the contact forces while moving. For robots, the most widely explored approaches heavily depend on models of manipulated objects and expensive sensors to gather contact location and force information needed for real-time control. The models are difficult to obtain, and the sensors are costly, hindering personal robots' adoption in our homes and businesses. This study performs model-free reinforcement learning of a normal contact force controller on a robotic manipulation system built with a low-cost, information-poor tactile sensor. Despite the limited sensing capability, our force controller can be combined with a motion controller to enable fine contact interactions during object manipulation. Promising results are demonstrated in non-prehensile, dexterous manipulation experiments.
Unifying Consciousness and Time to Enhance Artificial Intelligence
Jan 10, 2023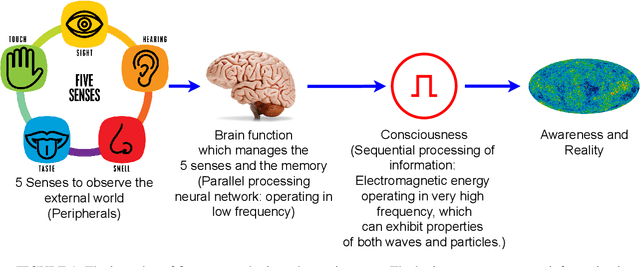
Consciousness is a sequential process of awareness which can focus on one piece of information at a time. This process of awareness experiences causation which underpins the notion of time while it interplays with matter and energy, forming reality. The study of Consciousness, time and reality is complex and evolving fast in many fields, including metaphysics and fundamental physics. Reality composes patterns in human Consciousness in response to the regularities in nature. These regularities could be physical (e.g., astronomical, environmental), biological, chemical, mental, social, etc. The patterns that emerged in Consciousness were correlated to the environment, life and social behaviours followed by constructed frameworks, systems and structures. The complex constructs evolved as cultures, customs, norms and values, which created a diverse society. In the evolution of responsible AI, it is important to be attuned to the evolved cultural, ethical and moral values through Consciousness. This requires the advocated design of self-learning AI aware of time perception and human ethics.
PlaSma: Making Small Language Models Better Procedural Knowledge Models for (Counterfactual) Planning
May 31, 2023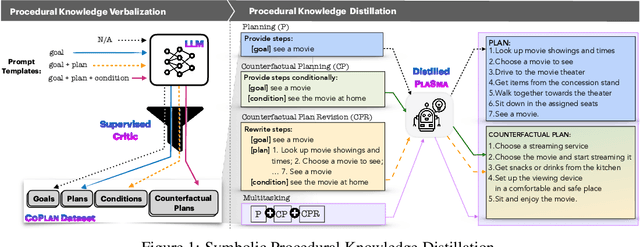
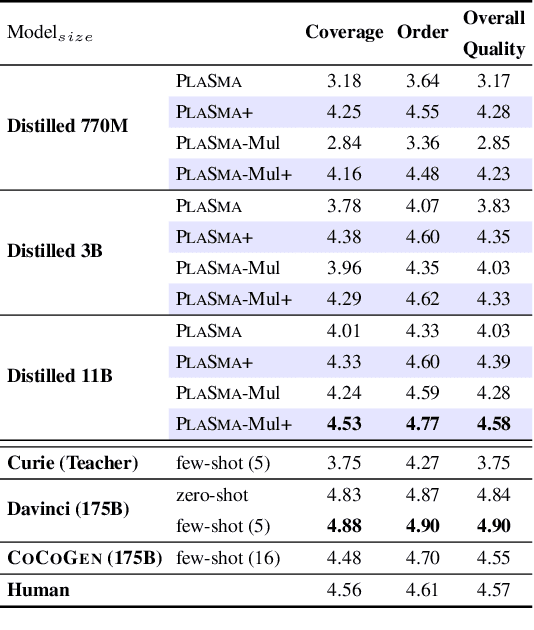
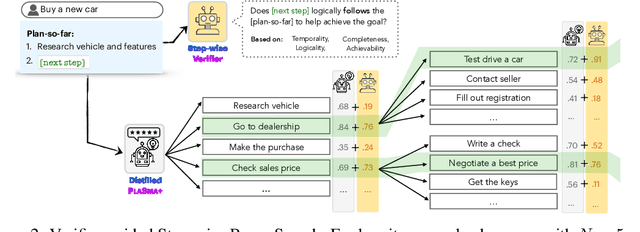
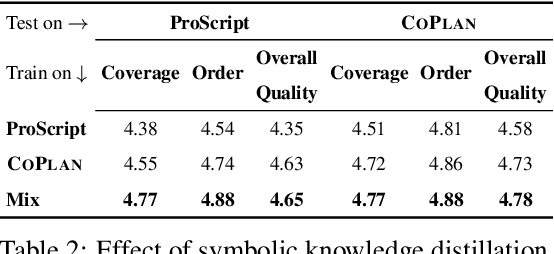
Procedural planning, which entails decomposing a high-level goal into a sequence of temporally ordered steps, is an important yet intricate task for machines. It involves integrating common-sense knowledge to reason about complex contextualized situations that are often counterfactual, e.g. "scheduling a doctor's appointment without a phone". While current approaches show encouraging results using large language models (LLMs), they are hindered by drawbacks such as costly API calls and reproducibility issues. In this paper, we advocate planning using smaller language models. We present PlaSma, a novel two-pronged approach to endow small language models with procedural knowledge and (counterfactual) planning capabilities. More concretely, we develop symbolic procedural knowledge distillation to enhance the implicit knowledge in small language models and an inference-time algorithm to facilitate more structured and accurate reasoning. In addition, we introduce a novel task, Counterfactual Planning, that requires a revision of a plan to cope with a counterfactual situation. In both the original and counterfactual setting, we show that orders-of-magnitude smaller models (770M-11B parameters) can compete and often surpass their larger teacher models' capabilities.
Adaptive Coordination in Social Embodied Rearrangement
May 31, 2023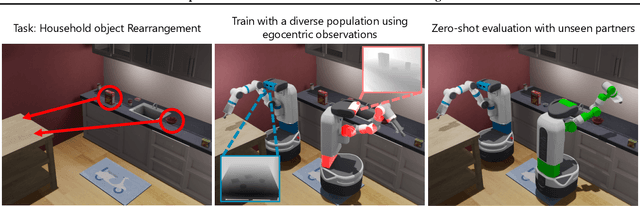
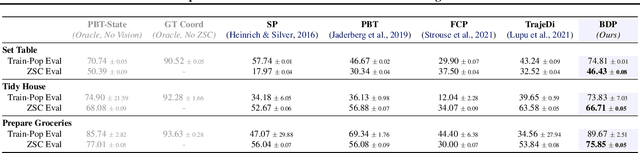
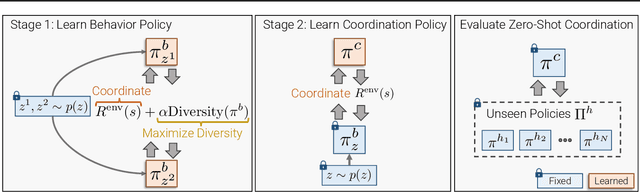
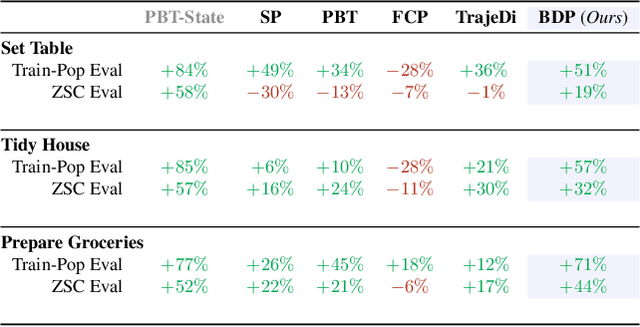
We present the task of "Social Rearrangement", consisting of cooperative everyday tasks like setting up the dinner table, tidying a house or unpacking groceries in a simulated multi-agent environment. In Social Rearrangement, two robots coordinate to complete a long-horizon task, using onboard sensing and egocentric observations, and no privileged information about the environment. We study zero-shot coordination (ZSC) in this task, where an agent collaborates with a new partner, emulating a scenario where a robot collaborates with a new human partner. Prior ZSC approaches struggle to generalize in our complex and visually rich setting, and on further analysis, we find that they fail to generate diverse coordination behaviors at training time. To counter this, we propose Behavior Diversity Play (BDP), a novel ZSC approach that encourages diversity through a discriminability objective. Our results demonstrate that BDP learns adaptive agents that can tackle visual coordination, and zero-shot generalize to new partners in unseen environments, achieving 35% higher success and 32% higher efficiency compared to baselines.
APPRAISER: DNN Fault Resilience Analysis Employing Approximation Errors
May 31, 2023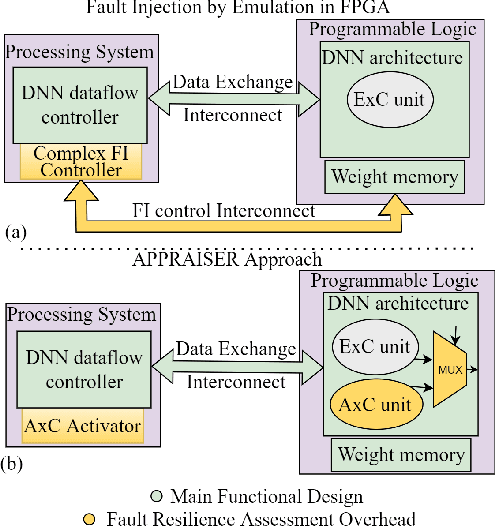
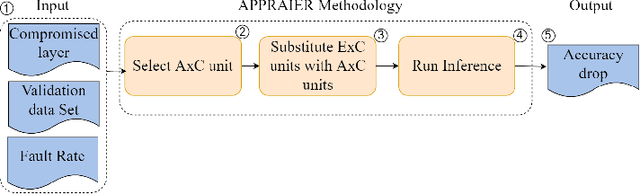
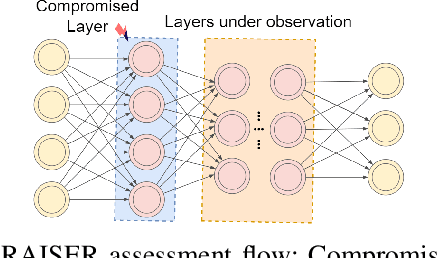
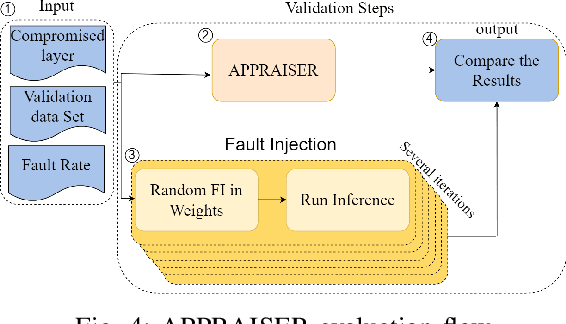
Nowadays, the extensive exploitation of Deep Neural Networks (DNNs) in safety-critical applications raises new reliability concerns. In practice, methods for fault injection by emulation in hardware are efficient and widely used to study the resilience of DNN architectures for mitigating reliability issues already at the early design stages. However, the state-of-the-art methods for fault injection by emulation incur a spectrum of time-, design- and control-complexity problems. To overcome these issues, a novel resiliency assessment method called APPRAISER is proposed that applies functional approximation for a non-conventional purpose and employs approximate computing errors for its interest. By adopting this concept in the resiliency assessment domain, APPRAISER provides thousands of times speed-up in the assessment process, while keeping high accuracy of the analysis. In this paper, APPRAISER is validated by comparing it with state-of-the-art approaches for fault injection by emulation in FPGA. By this, the feasibility of the idea is demonstrated, and a new perspective in resiliency evaluation for DNNs is opened.
Diagnosis and Prognosis of Head and Neck Cancer Patients using Artificial Intelligence
May 31, 2023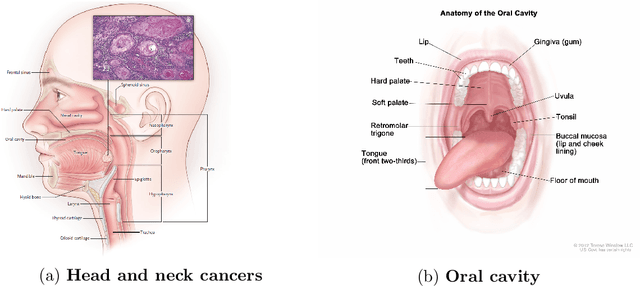
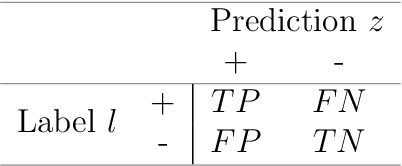
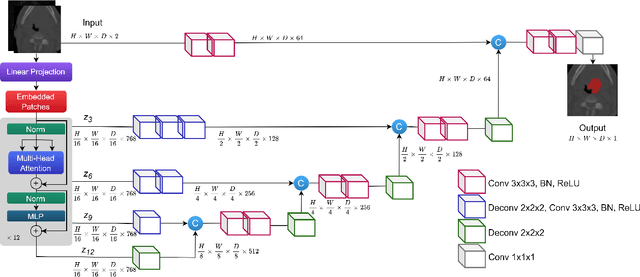

Cancer is one of the most life-threatening diseases worldwide, and head and neck (H&N) cancer is a prevalent type with hundreds of thousands of new cases recorded each year. Clinicians use medical imaging modalities such as computed tomography and positron emission tomography to detect the presence of a tumor, and they combine that information with clinical data for patient prognosis. The process is mostly challenging and time-consuming. Machine learning and deep learning can automate these tasks to help clinicians with highly promising results. This work studies two approaches for H&N tumor segmentation: (i) exploration and comparison of vision transformer (ViT)-based and convolutional neural network-based models; and (ii) proposal of a novel 2D perspective to working with 3D data. Furthermore, this work proposes two new architectures for the prognosis task. An ensemble of several models predicts patient outcomes (which won the HECKTOR 2021 challenge prognosis task), and a ViT-based framework concurrently performs patient outcome prediction and tumor segmentation, which outperforms the ensemble model.
Convex Geometric Trajectory Tracking using Lie Algebraic MPC for Autonomous Marine Vehicles
May 15, 2023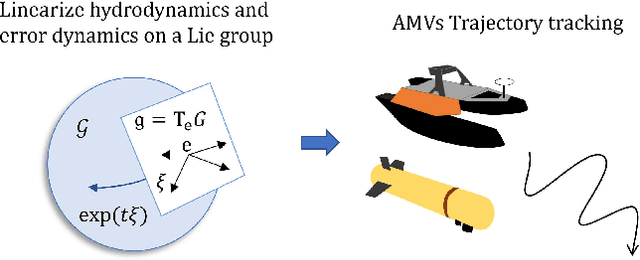
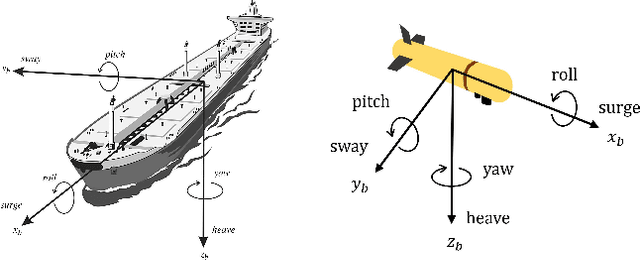
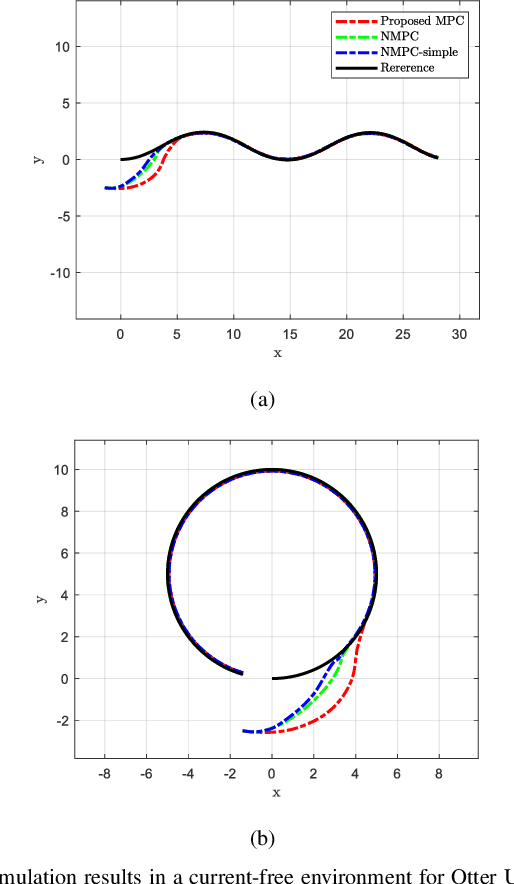
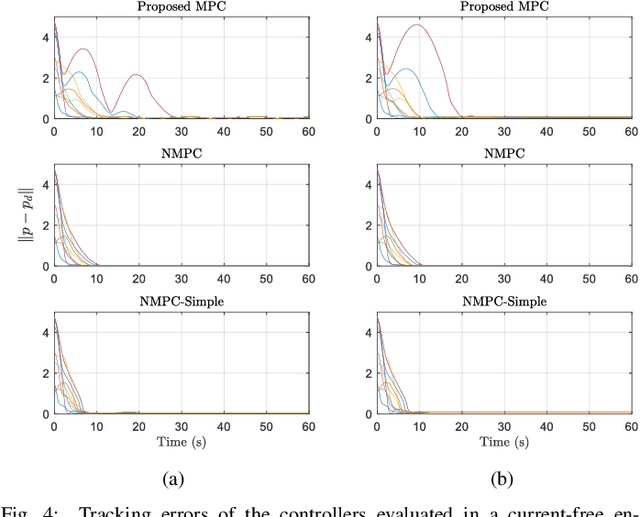
Controlling marine vehicles in challenging environments is a complex task due to the presence of nonlinear hydrodynamics and uncertain external disturbances. Despite nonlinear model predictive control (MPC) showing potential in addressing these issues, its practical implementation is often constrained by computational limitations. In this paper, we propose an efficient controller for trajectory tracking of marine vehicles by employing a convex error-state MPC on the Lie group. By leveraging the inherent geometric properties of the Lie group, we can construct globally valid error dynamics and formulate a quadratic programming-based optimization problem. Our proposed MPC demonstrates effectiveness in trajectory tracking through extensive-numerical simulations, including scenarios involving ocean currents. Notably, our method substantially reduces computation time compared to nonlinear MPC, making it well-suited for real-time control applications with long prediction horizons or involving small marine vehicles.
Time Series Forecasting via Semi-Asymmetric Convolutional Architecture with Global Atrous Sliding Window
Jan 31, 2023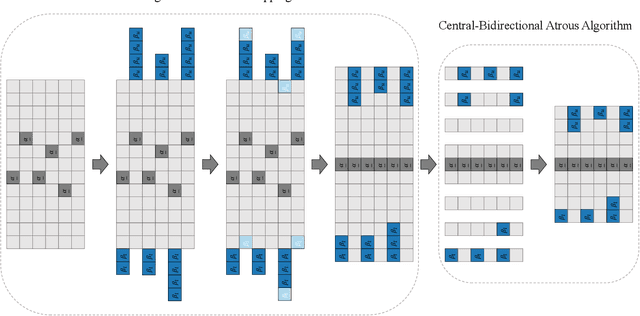
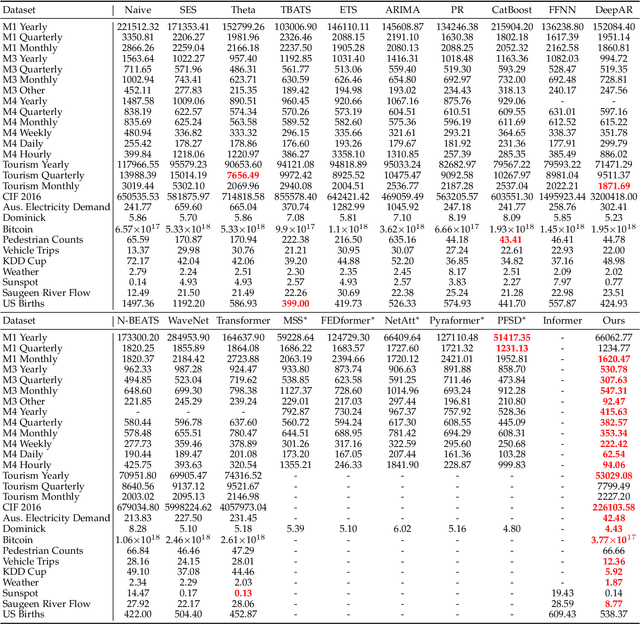
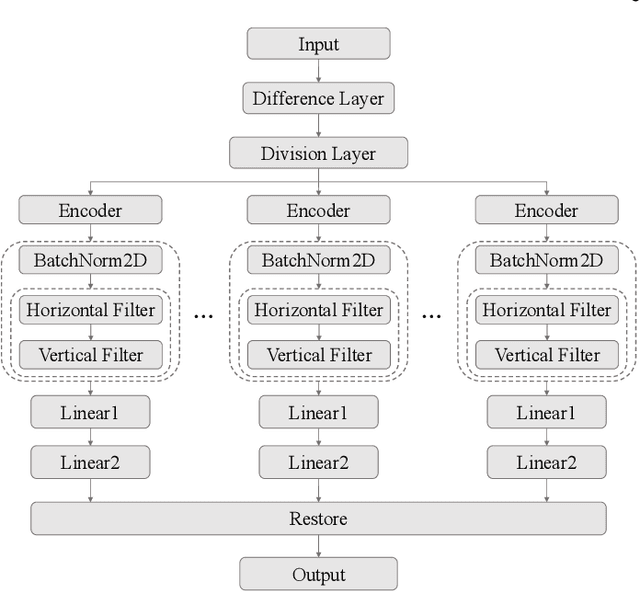
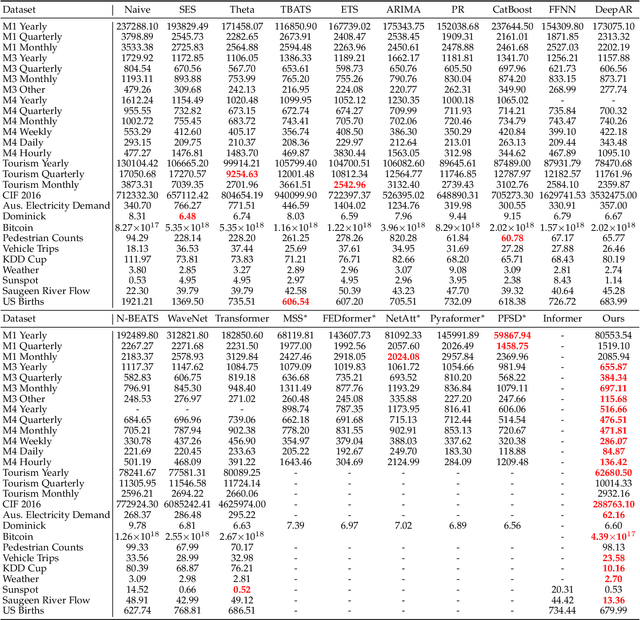
The proposed method in this paper is designed to address the problem of time series forecasting. Although some exquisitely designed models achieve excellent prediction performances, how to extract more useful information and make accurate predictions is still an open issue. Most of modern models only focus on a short range of information, which are fatal for problems such as time series forecasting which needs to capture long-term information characteristics. As a result, the main concern of this work is to further mine relationship between local and global information contained in time series to produce more precise predictions. In this paper, to satisfactorily realize the purpose, we make three main contributions that are experimentally verified to have performance advantages. Firstly, original time series is transformed into difference sequence which serves as input to the proposed model. And secondly, we introduce the global atrous sliding window into the forecasting model which references the concept of fuzzy time series to associate relevant global information with temporal data within a time period and utilizes central-bidirectional atrous algorithm to capture underlying-related features to ensure validity and consistency of captured data. Thirdly, a variation of widely-used asymmetric convolution which is called semi-asymmetric convolution is devised to more flexibly extract relationships in adjacent elements and corresponding associated global features with adjustable ranges of convolution on vertical and horizontal directions. The proposed model in this paper achieves state-of-the-art on most of time series datasets provided compared with competitive modern models.
Generalization bounds for neural ordinary differential equations and deep residual networks
May 11, 2023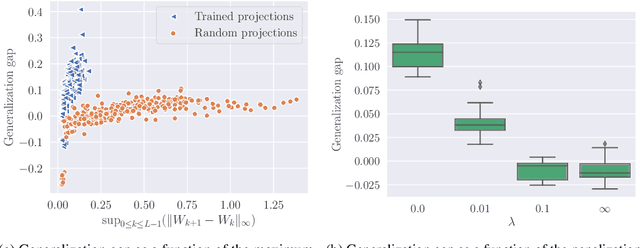
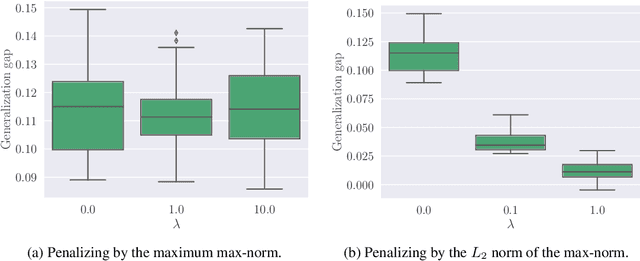
Neural ordinary differential equations (neural ODEs) are a popular family of continuous-depth deep learning models. In this work, we consider a large family of parameterized ODEs with continuous-in-time parameters, which include time-dependent neural ODEs. We derive a generalization bound for this class by a Lipschitz-based argument. By leveraging the analogy between neural ODEs and deep residual networks, our approach yields in particular a generalization bound for a class of deep residual networks. The bound involves the magnitude of the difference between successive weight matrices. We illustrate numerically how this quantity affects the generalization capability of neural networks.
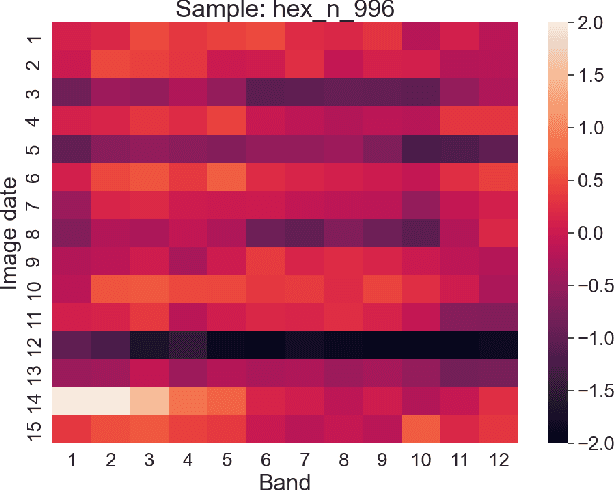
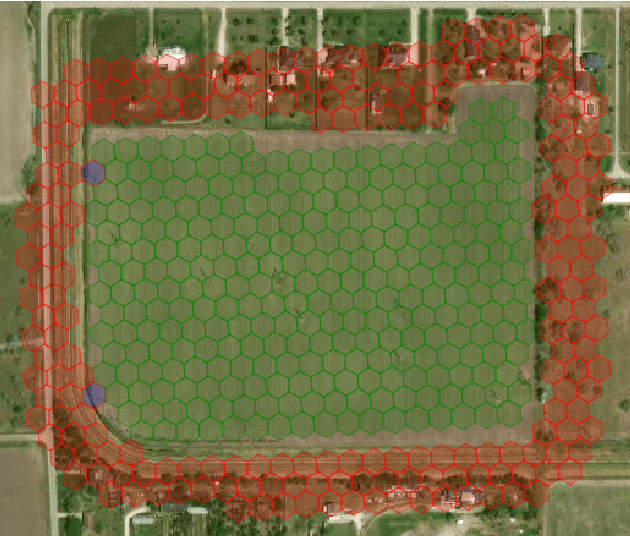
Productive Crop Field Detection: A New Dataset and Deep Learning Benchmark Results
May 19, 2023

In precision agriculture, detecting productive crop fields is an essential practice that allows the farmer to evaluate operating performance separately and compare different seed varieties, pesticides, and fertilizers. However, manually identifying productive fields is often a time-consuming and error-prone task. Previous studies explore different methods to detect crop fields using advanced machine learning algorithms, but they often lack good quality labeled data. In this context, we propose a high-quality dataset generated by machine operation combined with Sentinel-2 images tracked over time. As far as we know, it is the first one to overcome the lack of labeled samples by using this technique. In sequence, we apply a semi-supervised classification of unlabeled data and state-of-the-art supervised and self-supervised deep learning methods to detect productive crop fields automatically. Finally, the results demonstrate high accuracy in Positive Unlabeled learning, which perfectly fits the problem where we have high confidence in the positive samples. Best performances have been found in Triplet Loss Siamese given the existence of an accurate dataset and Contrastive Learning considering situations where we do not have a comprehensive labeled dataset available.