 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Joint Beam Routing and Resource Allocation Optimization for Multi-IRS-Reflection Wireless Power Transfer
Jul 17, 2023
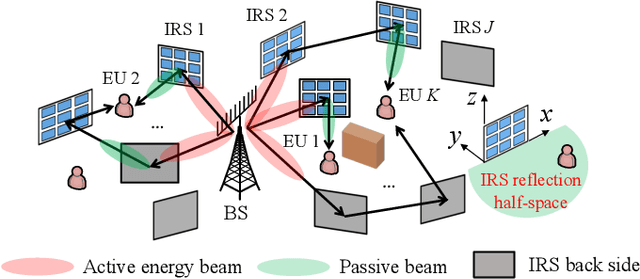
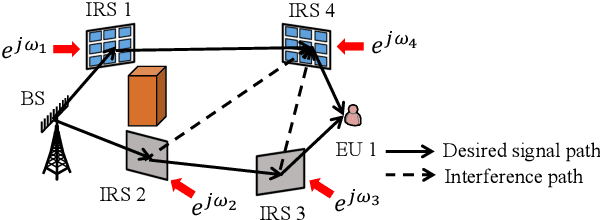
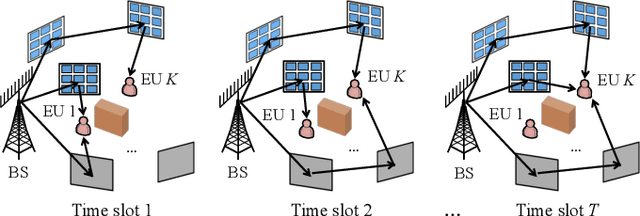
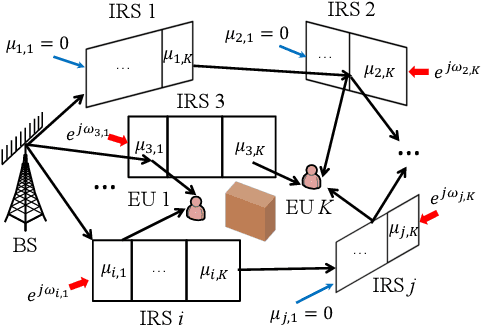
Intelligent reflecting surface (IRS) can be densely deployed in complex environments to create cascaded line-of-sight (LoS) links between base stations (BSs) and users, which significantly enhance the signal coverage. In this paper, we consider the wireless power transfer (WPT) from a multi-antenna BS to multiple energy users (EUs) by exploiting the signal beam routing via multi-IRS reflections. First, we present a baseline beam routing scheme with each IRS serving at most one EU, where the BS transmits wireless power to all EUs simultaneously while the signals to different EUs undergo disjoint sets of multi-IRS reflection paths. Under this setup, we aim to tackle the joint beam routing and resource allocation optimization problem by jointly optimizing the reflection paths for all EUs, the active/passive beamforming at the BS/each involved IRS, as well as the BS's power allocation for different EUs to maximize the minimum received signal power among all EUs. Next, to further improve the WPT performance, we propose two new beam routing schemes, namely dynamic beam routing and subsurface-based beam routing, where each IRS can serve multiple EUs via different time slots and different subsurfaces, respectively. In particular, we prove that dynamic beam routing outperforms subsurface-based beam routing in terms of minimum harvested power among all EUs. In addition, we show that the optimal performance of dynamic beam routing is achieved by assigning all EUs with orthogonal time slots for WPT. A clique-based optimization approach is also proposed to solve the joint beam routing and resource allocation problems for the baseline beam routing and proposed dynamic beam routing schemes. Numerical results are finally presented, which demonstrate the superior performance of the proposed dynamic beam routing scheme to the baseline scheme.
The Predicted-Deletion Dynamic Model: Taking Advantage of ML Predictions, for Free
Jul 17, 2023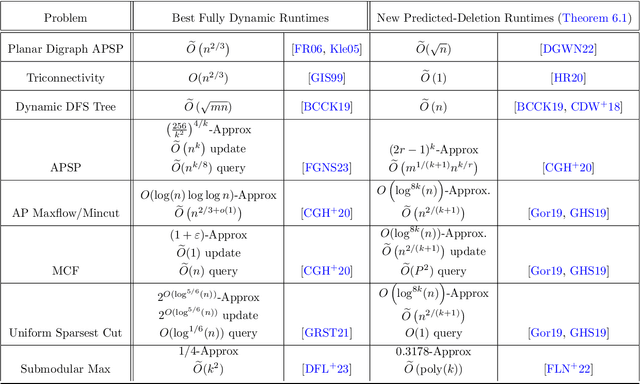
The main bottleneck in designing efficient dynamic algorithms is the unknown nature of the update sequence. In particular, there are some problems, like 3-vertex connectivity, planar digraph all pairs shortest paths, and others, where the separation in runtime between the best partially dynamic solutions and the best fully dynamic solutions is polynomial, sometimes even exponential. In this paper, we formulate the predicted-deletion dynamic model, motivated by a recent line of empirical work about predicting edge updates in dynamic graphs. In this model, edges are inserted and deleted online, and when an edge is inserted, it is accompanied by a "prediction" of its deletion time. This models real world settings where services may have access to historical data or other information about an input and can subsequently use such information make predictions about user behavior. The model is also of theoretical interest, as it interpolates between the partially dynamic and fully dynamic settings, and provides a natural extension of the algorithms with predictions paradigm to the dynamic setting. We give a novel framework for this model that "lifts" partially dynamic algorithms into the fully dynamic setting with little overhead. We use our framework to obtain improved efficiency bounds over the state-of-the-art dynamic algorithms for a variety of problems. In particular, we design algorithms that have amortized update time that scales with a partially dynamic algorithm, with high probability, when the predictions are of high quality. On the flip side, our algorithms do no worse than existing fully-dynamic algorithms when the predictions are of low quality. Furthermore, our algorithms exhibit a graceful trade-off between the two cases. Thus, we are able to take advantage of ML predictions asymptotically "for free.''
RePAD2: Real-Time, Lightweight, and Adaptive Anomaly Detection for Open-Ended Time Series
Mar 01, 2023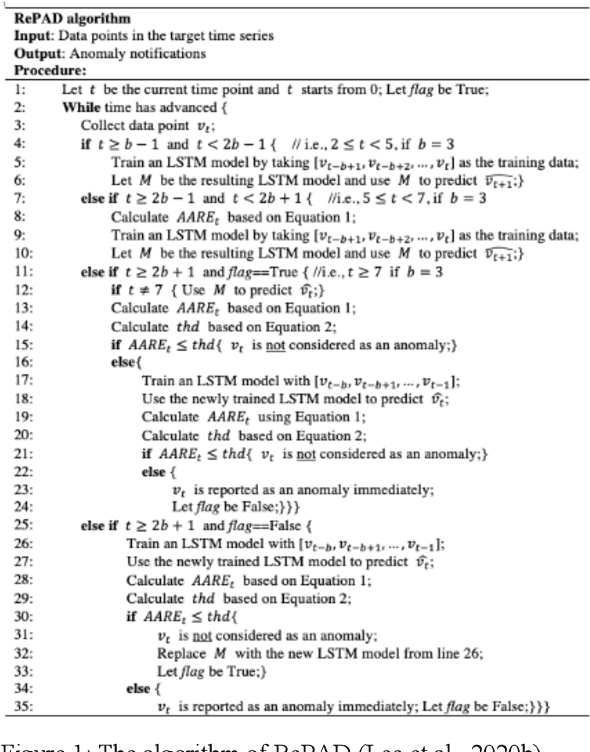
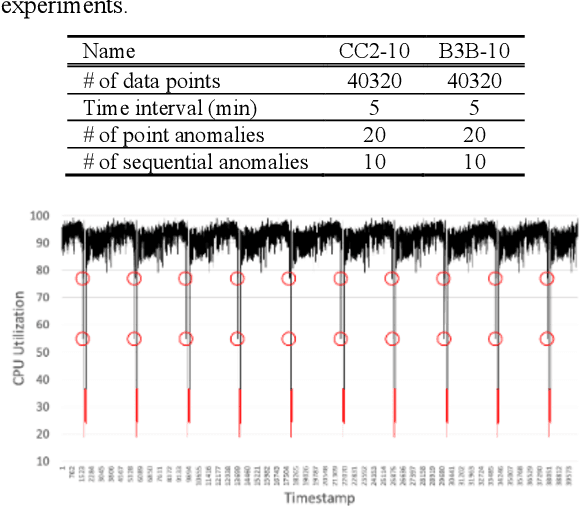
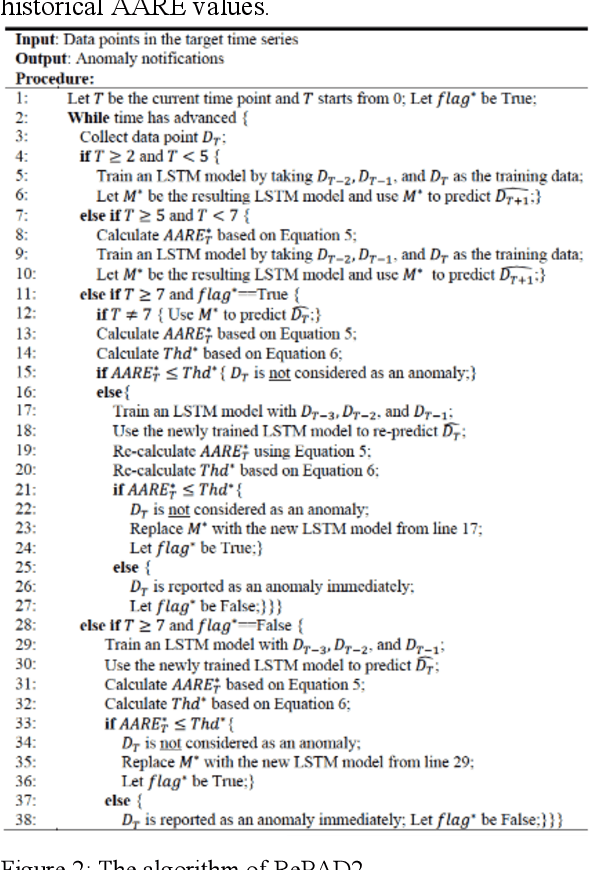
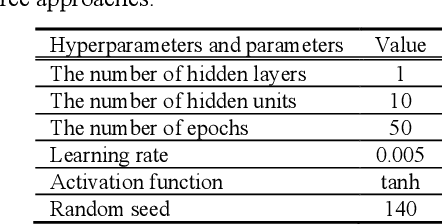
An open-ended time series refers to a series of data points indexed in time order without an end. Such a time series can be found everywhere due to the prevalence of Internet of Things. Providing lightweight and real-time anomaly detection for open-ended time series is highly desirable to industry and organizations since it allows immediate response and avoids potential financial loss. In the last few years, several real-time time series anomaly detection approaches have been introduced. However, they might exhaust system resources when they are applied to open-ended time series for a long time. To address this issue, in this paper we propose RePAD2, a lightweight real-time anomaly detection approach for open-ended time series by improving its predecessor RePAD, which is one of the state-of-the-art anomaly detection approaches. We conducted a series of experiments to compare RePAD2 with RePAD and another similar detection approach based on real-world time series datasets, and demonstrated that RePAD2 can address the mentioned resource exhaustion issue while offering comparable detection accuracy and slightly less time consumption.
Incremental Nonlinear Dynamic Inversion based Optical Flow Control for Flying Robots: An Efficient Data-driven Approach
Jul 06, 2023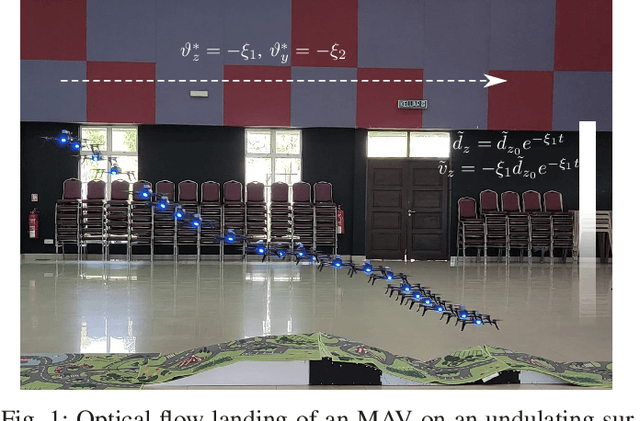
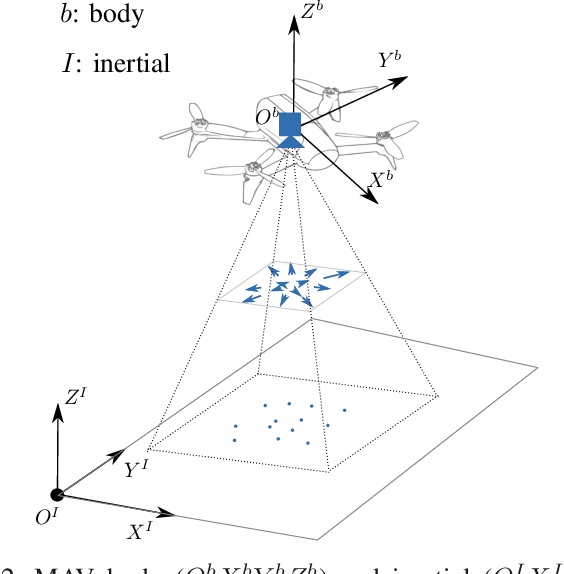
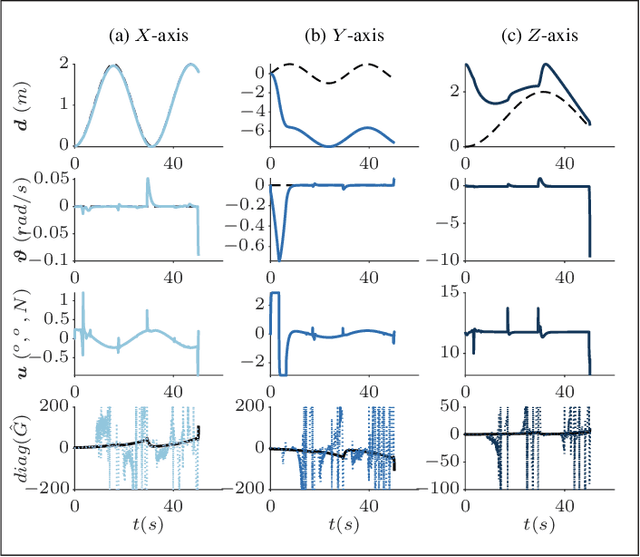
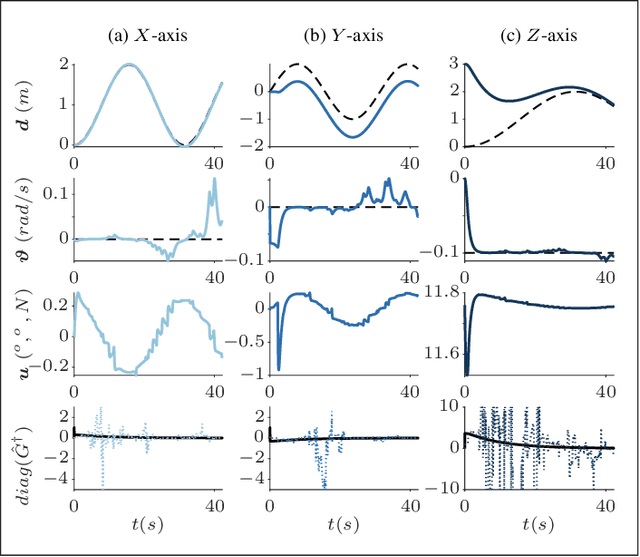
This paper presents a novel approach for optical flow control of Micro Air Vehicles (MAVs). The task is challenging due to the nonlinearity of optical flow observables. Our proposed Incremental Nonlinear Dynamic Inversion (INDI) control scheme incorporates an efficient data-driven method to address the nonlinearity. It directly estimates the inverse of the time-varying control effectiveness in real-time, eliminating the need for the constant assumption and avoiding high computation in traditional INDI. This approach effectively handles fast-changing system dynamics commonly encountered in optical flow control, particularly height-dependent changes. We demonstrate the robustness and efficiency of the proposed control scheme in numerical simulations and also real-world flight tests: multiple landings of an MAV on a static and flat surface with various tracking setpoints, hovering and landings on moving and undulating surfaces. Despite being challenged with the presence of noisy optical flow estimates and the lateral and vertical movement of the landing surfaces, the MAV is able to successfully track or land on the surface with an exponential decay of both height and vertical velocity at almost the same time, as desired.
A 137.5 TOPS/W SRAM Compute-in-Memory Macro with 9-b Memory Cell-Embedded ADCs and Signal Margin Enhancement Techniques for AI Edge Applications
Jul 17, 2023
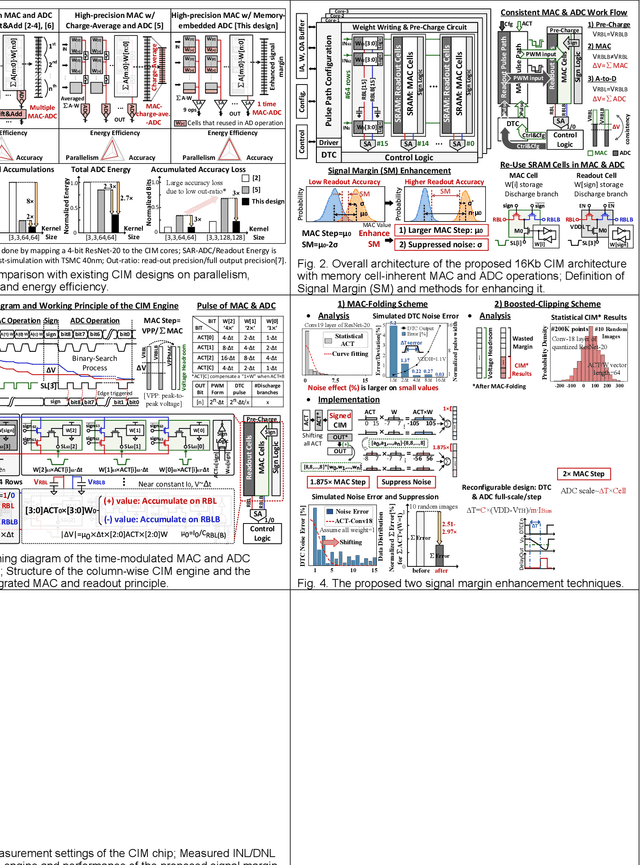
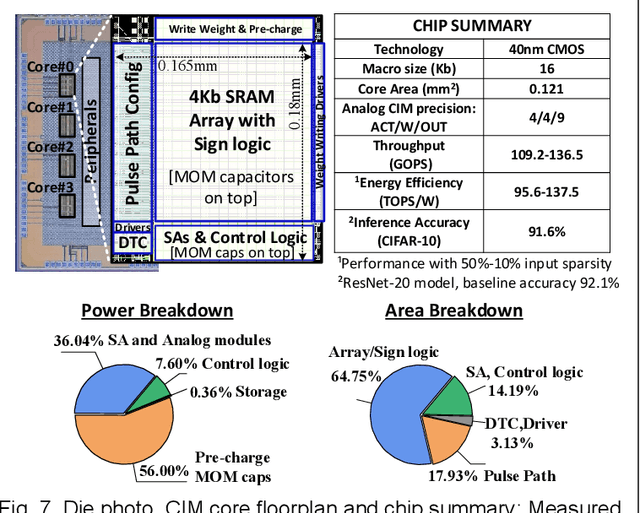
In this paper, we propose a high-precision SRAM-based CIM macro that can perform 4x4-bit MAC operations and yield 9-bit signed output. The inherent discharge branches of SRAM cells are utilized to apply time-modulated MAC and 9-bit ADC readout operations on two bit-line capacitors. The same principle is used for both MAC and A-to-D conversion ensuring high linearity and thus supporting large number of analog MAC accumulations. The memory cell-embedded ADC eliminates the use of separate ADCs and enhances energy and area efficiency. Additionally, two signal margin enhancement techniques, namely the MAC-folding and boosted-clipping schemes, are proposed to further improve the CIM computation accuracy.
Reducing hyperparameter dependence by external timescale tailoring
Jul 17, 2023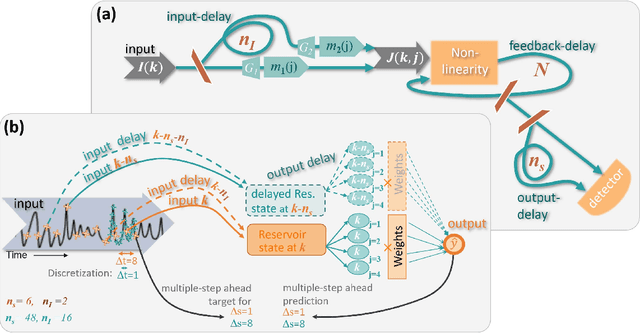
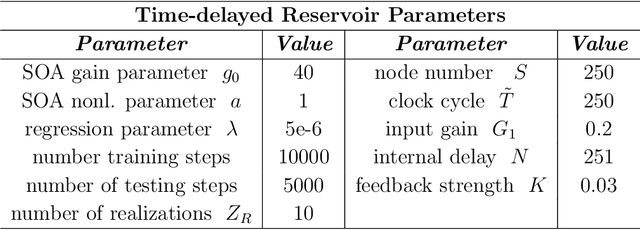
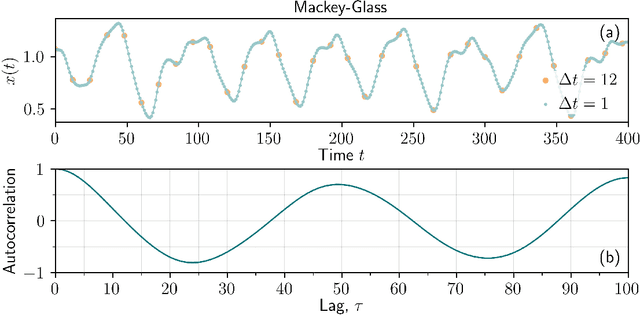
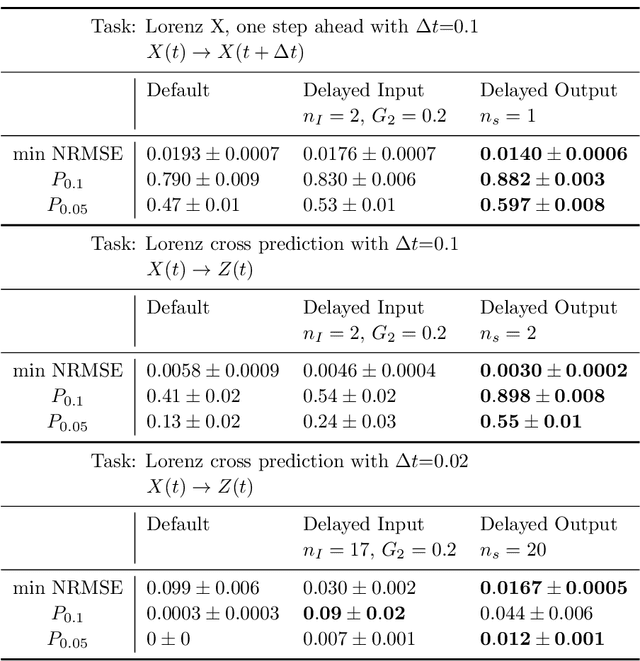
Task specific hyperparameter tuning in reservoir computing is an open issue, and is of particular relevance for hardware implemented reservoirs. We investigate the influence of directly including externally controllable task specific timescales on the performance and hyperparameter sensitivity of reservoir computing approaches. We show that the need for hyperparameter optimisation can be reduced if timescales of the reservoir are tailored to the specific task. Our results are mainly relevant for temporal tasks requiring memory of past inputs, for example chaotic timeseries prediciton. We consider various methods of including task specific timescales in the reservoir computing approach and demonstrate the universality of our message by looking at both time-multiplexed and spatially multiplexed reservoir computing.
Towards Automated Design of Riboswitches
Jul 17, 2023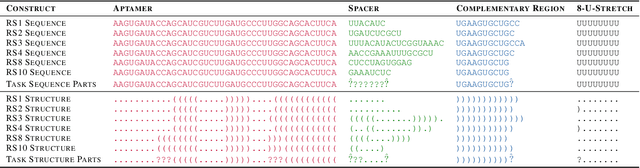
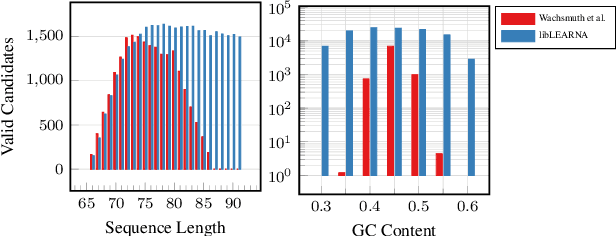

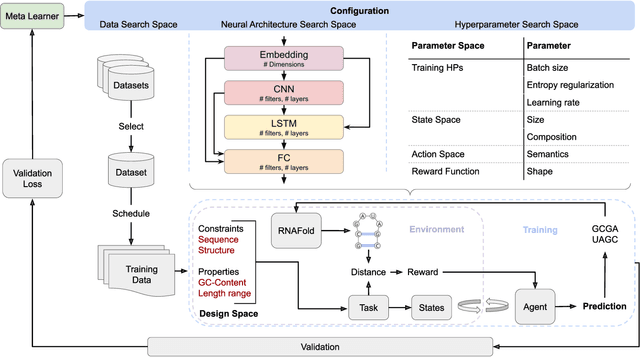
Experimental screening and selection pipelines for the discovery of novel riboswitches are expensive, time-consuming, and inefficient. Using computational methods to reduce the number of candidates for the screen could drastically decrease these costs. However, existing computational approaches do not fully satisfy all requirements for the design of such initial screening libraries. In this work, we present a new method, libLEARNA, capable of providing RNA focus libraries of diverse variable-length qualified candidates. Our novel structure-based design approach considers global properties as well as desired sequence and structure features. We demonstrate the benefits of our method by designing theophylline riboswitch libraries, following a previously published protocol, and yielding 30% more unique high-quality candidates.
An Examination of Wearable Sensors and Video Data Capture for Human Exercise Classification
Jul 10, 2023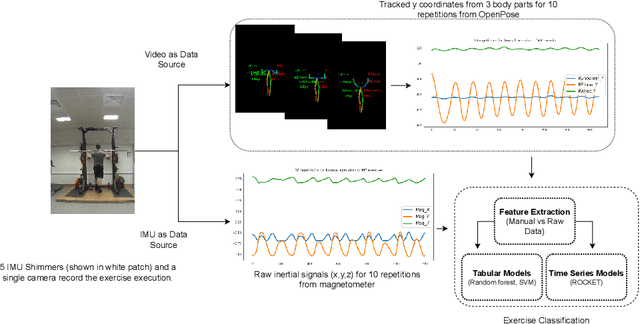
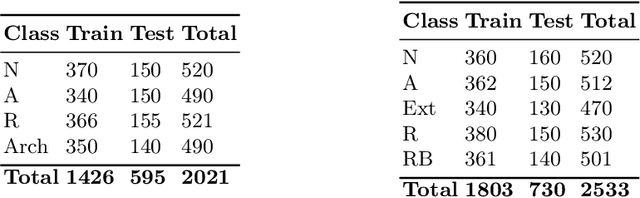
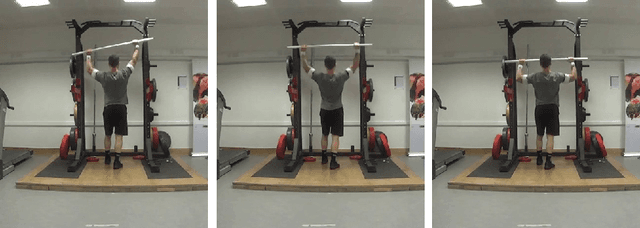
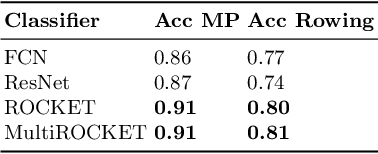
Wearable sensors such as Inertial Measurement Units (IMUs) are often used to assess the performance of human exercise. Common approaches use handcrafted features based on domain expertise or automatically extracted features using time series analysis. Multiple sensors are required to achieve high classification accuracy, which is not very practical. These sensors require calibration and synchronization and may lead to discomfort over longer time periods. Recent work utilizing computer vision techniques has shown similar performance using video, without the need for manual feature engineering, and avoiding some pitfalls such as sensor calibration and placement on the body. In this paper, we compare the performance of IMUs to a video-based approach for human exercise classification on two real-world datasets consisting of Military Press and Rowing exercises. We compare the performance using a single camera that captures video in the frontal view versus using 5 IMUs placed on different parts of the body. We observe that an approach based on a single camera can outperform a single IMU by 10 percentage points on average. Additionally, a minimum of 3 IMUs are required to outperform a single camera. We observe that working with the raw data using multivariate time series classifiers outperforms traditional approaches based on handcrafted or automatically extracted features. Finally, we show that an ensemble model combining the data from a single camera with a single IMU outperforms either data modality. Our work opens up new and more realistic avenues for this application, where a video captured using a readily available smartphone camera, combined with a single sensor, can be used for effective human exercise classification.
A Dual-mode Local Search Algorithm for Solving the Minimum Dominating Set Problem
Jul 25, 2023Given a graph, the minimum dominating set (MinDS) problem is to identify a smallest set $D$ of vertices such that every vertex not in $D$ is adjacent to at least one vertex in $D$. The MinDS problem is a classic $\mathcal{NP}$-hard problem and has been extensively studied because of its many disparate applications in network analysis. To solve this problem efficiently, many heuristic approaches have been proposed to obtain a good solution within an acceptable time limit. However, existing MinDS heuristic algorithms are always limited by various tie-breaking cases when selecting vertices, which slows down the effectiveness of the algorithms. In this paper, we design an efficient local search algorithm for the MinDS problem, named DmDS -- a dual-mode local search framework that probabilistically chooses between two distinct vertex-swapping schemes. We further address limitations of other algorithms by introducing vertex selection criterion based on the frequency of vertices added to solutions to address tie-breaking cases, and a new strategy to improve the quality of the initial solution via a greedy-based strategy integrated with perturbation. We evaluate DmDS against the state-of-the-art algorithms on seven datasets, consisting of 346 instances (or families) with up to tens of millions of vertices. Experimental results show that DmDS obtains the best performance in accuracy for almost all instances and finds much better solutions than state-of-the-art MinDS algorithms on a broad range of large real-world graphs.
A Data-Driven Approach to Synthesizing Dynamics-Aware Trajectories for Underactuated Robotic Systems
Jul 25, 2023
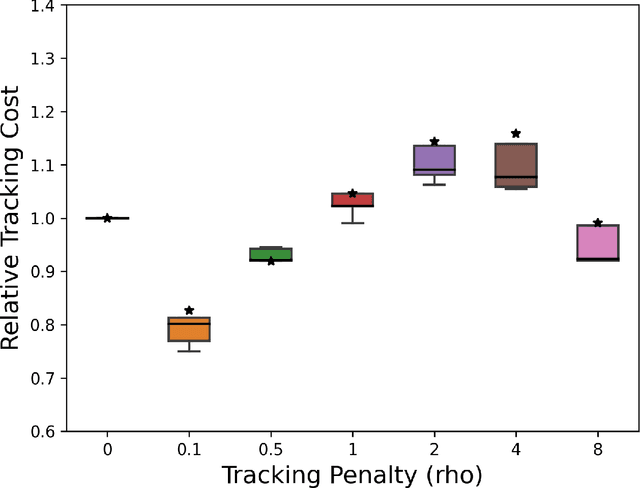
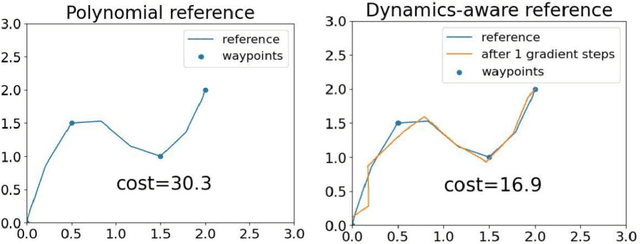
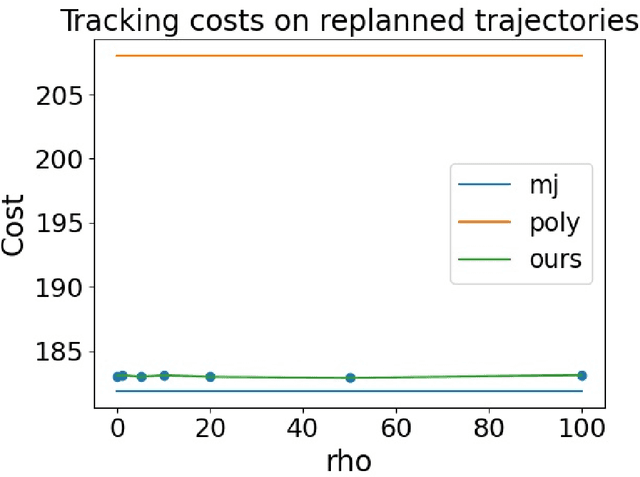
We consider joint trajectory generation and tracking control for under-actuated robotic systems. A common solution is to use a layered control architecture, where the top layer uses a simplified model of system dynamics for trajectory generation, and the low layer ensures approximate tracking of this trajectory via feedback control. While such layered control architectures are standard and work well in practice, selecting the simplified model used for trajectory generation typically relies on engineering intuition and experience. In this paper, we propose an alternative data-driven approach to dynamics-aware trajectory generation. We show that a suitable augmented Lagrangian reformulation of a global nonlinear optimal control problem results in a layered decomposition of the overall problem into trajectory planning and feedback control layers. Crucially, the resulting trajectory optimization is dynamics-aware, in that, it is modified with a tracking penalty regularizer encoding the dynamic feasibility of the generated trajectory. We show that this tracking penalty regularizer can be learned from system rollouts for independently-designed low layer feedback control policies, and instantiate our framework in the context of a unicycle and a quadrotor control problem in simulation. Further, we show that our approach handles the sim-to-real gap through experiments on the quadrotor hardware platform without any additional training. For both the synthetic unicycle example and the quadrotor system, our framework shows significant improvements in both computation time and dynamic feasibility in simulation and hardware experiments.