 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Zero-touch realization of Pervasive Artificial Intelligence-as-a-service in 6G networks
Jul 21, 2023
The vision of the upcoming 6G technologies, characterized by ultra-dense network, low latency, and fast data rate is to support Pervasive AI (PAI) using zero-touch solutions enabling self-X (e.g., self-configuration, self-monitoring, and self-healing) services. However, the research on 6G is still in its infancy, and only the first steps have been taken to conceptualize its design, investigate its implementation, and plan for use cases. Toward this end, academia and industry communities have gradually shifted from theoretical studies of AI distribution to real-world deployment and standardization. Still, designing an end-to-end framework that systematizes the AI distribution by allowing easier access to the service using a third-party application assisted by a zero-touch service provisioning has not been well explored. In this context, we introduce a novel platform architecture to deploy a zero-touch PAI-as-a-Service (PAIaaS) in 6G networks supported by a blockchain-based smart system. This platform aims to standardize the pervasive AI at all levels of the architecture and unify the interfaces in order to facilitate the service deployment across application and infrastructure domains, relieve the users worries about cost, security, and resource allocation, and at the same time, respect the 6G stringent performance requirements. As a proof of concept, we present a Federated Learning-as-a-service use case where we evaluate the ability of our proposed system to self-optimize and self-adapt to the dynamics of 6G networks in addition to minimizing the users' perceived costs.
* IEEE Communications Magazine
EV-Planner: Energy-Efficient Robot Navigation via Event-Based Physics-Guided Neuromorphic Planner
Jul 21, 2023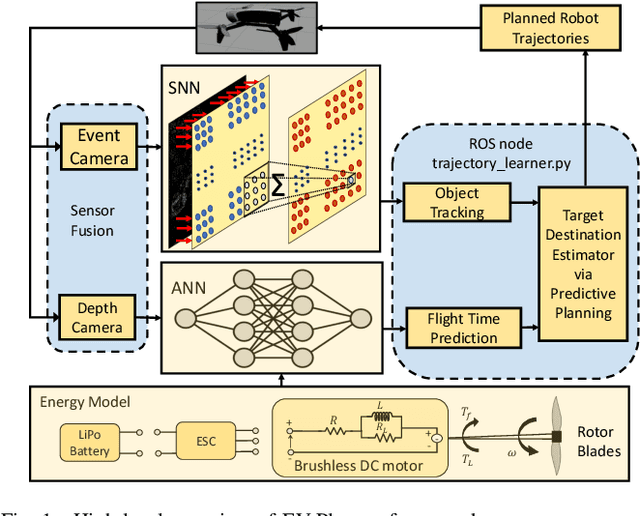
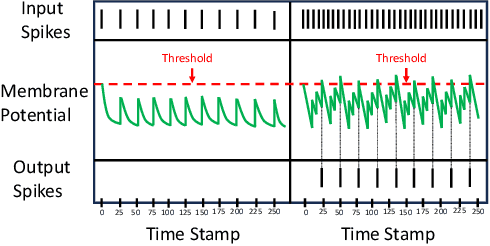
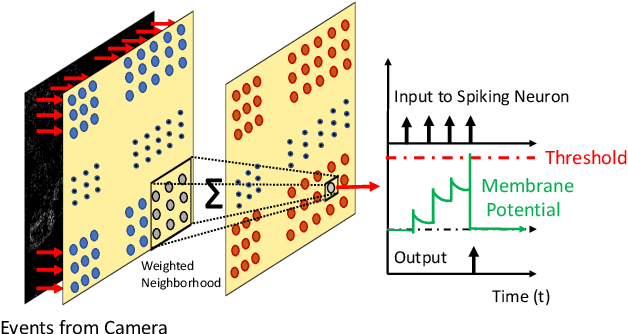
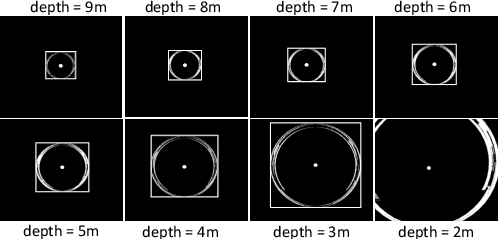
Vision-based object tracking is an essential precursor to performing autonomous aerial navigation in order to avoid obstacles. Biologically inspired neuromorphic event cameras are emerging as a powerful alternative to frame-based cameras, due to their ability to asynchronously detect varying intensities (even in poor lighting conditions), high dynamic range, and robustness to motion blur. Spiking neural networks (SNNs) have gained traction for processing events asynchronously in an energy-efficient manner. On the other hand, physics-based artificial intelligence (AI) has gained prominence recently, as they enable embedding system knowledge via physical modeling inside traditional analog neural networks (ANNs). In this letter, we present an event-based physics-guided neuromorphic planner (EV-Planner) to perform obstacle avoidance using neuromorphic event cameras and physics-based AI. We consider the task of autonomous drone navigation where the mission is to detect moving gates and fly through them while avoiding a collision. We use event cameras to perform object detection using a shallow spiking neural network in an unsupervised fashion. Utilizing the physical equations of the brushless DC motors present in the drone rotors, we train a lightweight energy-aware physics-guided neural network with depth inputs. This predicts the optimal flight time responsible for generating near-minimum energy paths. We spawn the drone in the Gazebo simulator and implement a sensor-fused vision-to-planning neuro-symbolic framework using Robot Operating System (ROS). Simulation results for safe collision-free flight trajectories are presented with performance analysis and potential future research directions
Analyzing and Improving Greedy 2-Coordinate Updates for Equality-Constrained Optimization via Steepest Descent in the 1-Norm
Jul 03, 2023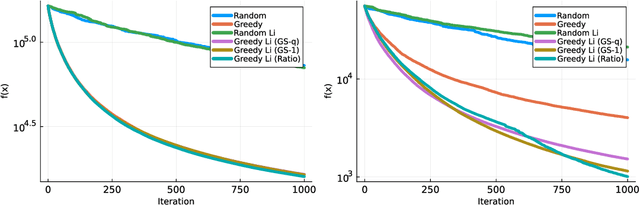
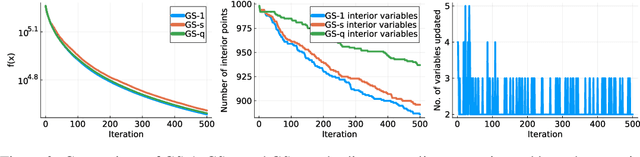
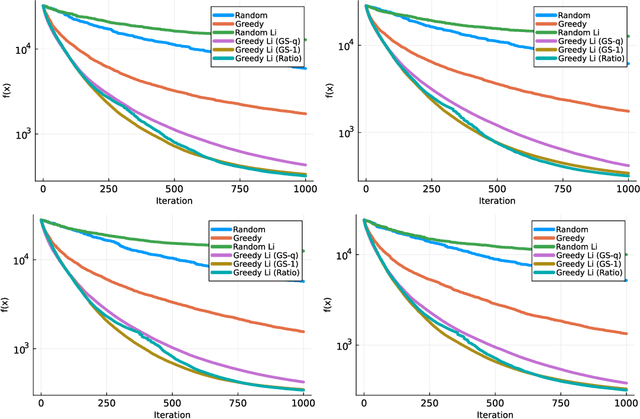
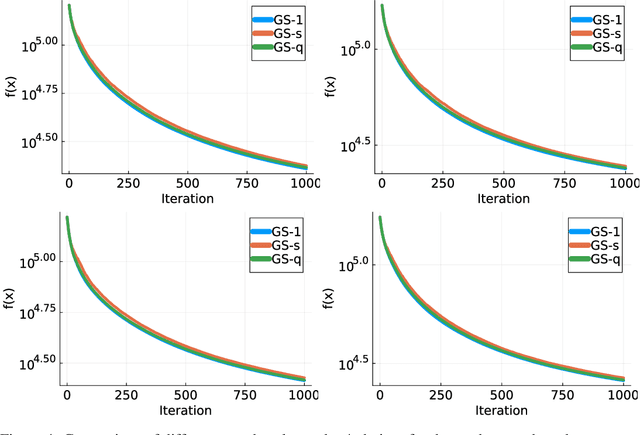
We consider minimizing a smooth function subject to a summation constraint over its variables. By exploiting a connection between the greedy 2-coordinate update for this problem and equality-constrained steepest descent in the 1-norm, we give a convergence rate for greedy selection under a proximal Polyak-Lojasiewicz assumption that is faster than random selection and independent of the problem dimension $n$. We then consider minimizing with both a summation constraint and bound constraints, as arises in the support vector machine dual problem. Existing greedy rules for this setting either guarantee trivial progress only or require $O(n^2)$ time to compute. We show that bound- and summation-constrained steepest descent in the L1-norm guarantees more progress per iteration than previous rules and can be computed in only $O(n \log n)$ time.
A 137.5 TOPS/W SRAM Compute-in-Memory Macro with 9-b Memory Cell-Embedded ADCs and Signal Margin Enhancement Techniques for AI Edge Applications
Jul 12, 2023
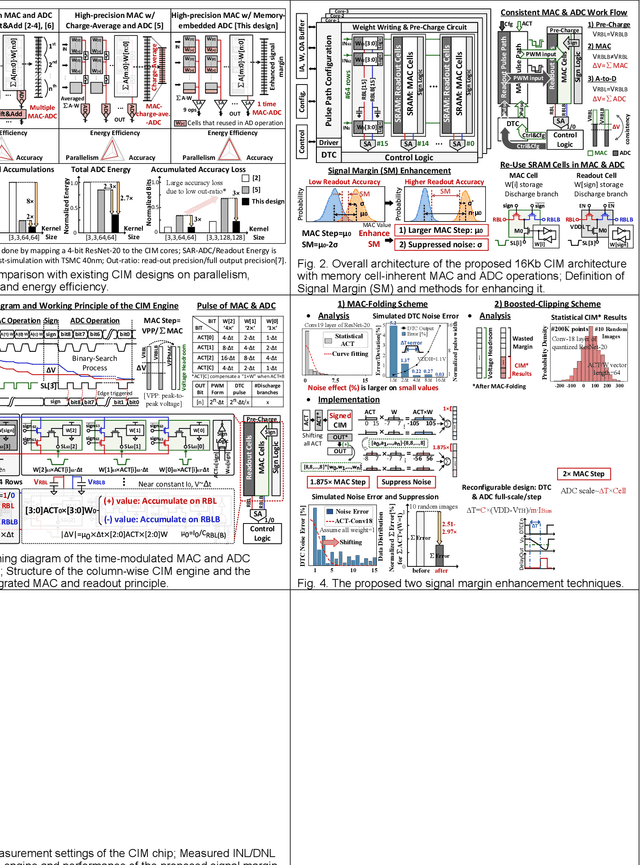
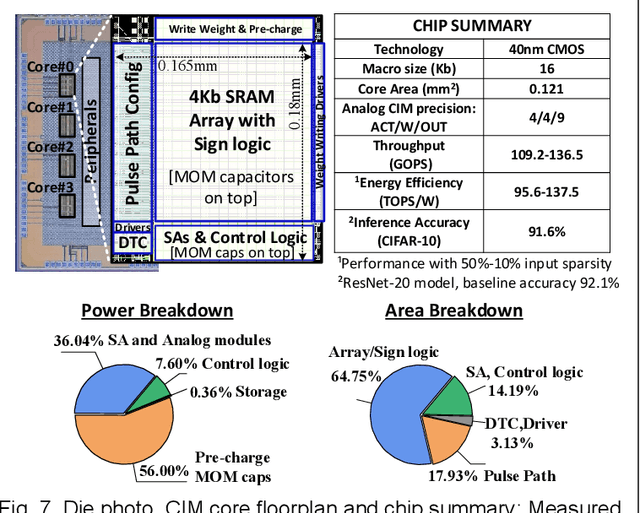
In this paper, we propose a high-precision SRAM-based CIM macro that can perform 4x4-bit MAC operations and yield 9-bit signed output. The inherent discharge branches of SRAM cells are utilized to apply time-modulated MAC and 9-bit ADC readout operations on two bit-line capacitors. The same principle is used for both MAC and A-to-D conversion ensuring high linearity and thus supporting large number of analog MAC accumulations. The memory cell-embedded ADC eliminates the use of separate ADCs and enhances energy and area efficiency. Additionally, two signal margin enhancement techniques, namely the MAC-folding and boosted-clipping schemes, are proposed to further improve the CIM computation accuracy.
Rigorous Runtime Analysis of Diversity Optimization with GSEMO on OneMinMax
Jul 14, 2023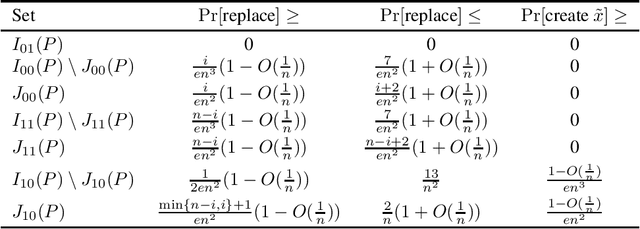
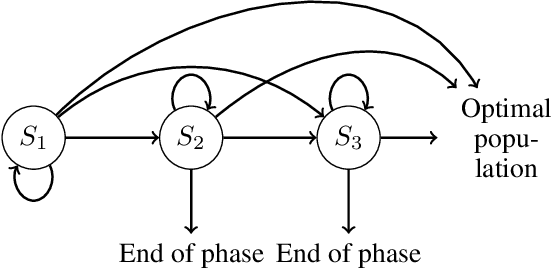
The evolutionary diversity optimization aims at finding a diverse set of solutions which satisfy some constraint on their fitness. In the context of multi-objective optimization this constraint can require solutions to be Pareto-optimal. In this paper we study how the GSEMO algorithm with additional diversity-enhancing heuristic optimizes a diversity of its population on a bi-objective benchmark problem OneMinMax, for which all solutions are Pareto-optimal. We provide a rigorous runtime analysis of the last step of the optimization, when the algorithm starts with a population with a second-best diversity, and prove that it finds a population with optimal diversity in expected time $O(n^2)$, when the problem size $n$ is odd. For reaching our goal, we analyse the random walk of the population, which reflects the frequency of changes in the population and their outcomes.
Linking vision and motion for self-supervised object-centric perception
Jul 14, 2023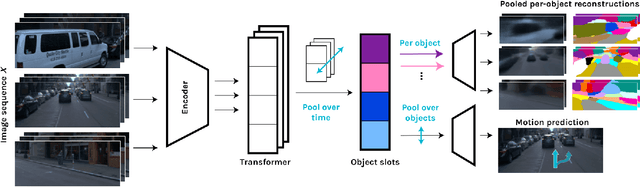
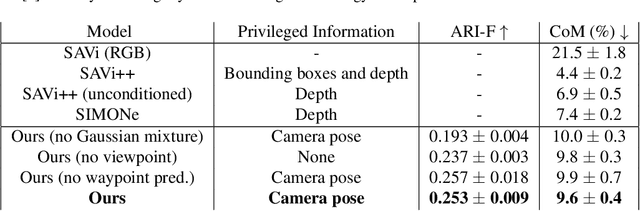
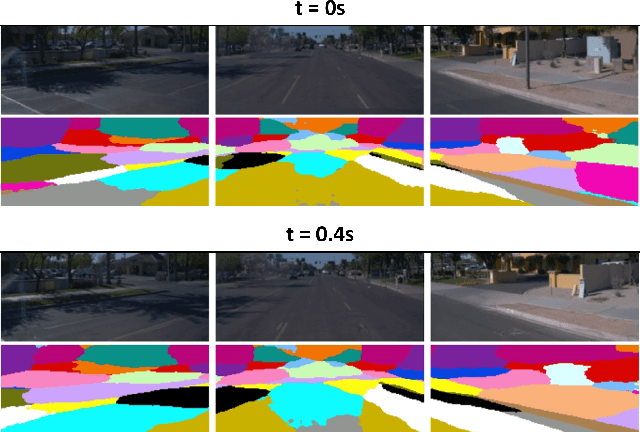

Object-centric representations enable autonomous driving algorithms to reason about interactions between many independent agents and scene features. Traditionally these representations have been obtained via supervised learning, but this decouples perception from the downstream driving task and could harm generalization. In this work we adapt a self-supervised object-centric vision model to perform object decomposition using only RGB video and the pose of the vehicle as inputs. We demonstrate that our method obtains promising results on the Waymo Open perception dataset. While object mask quality lags behind supervised methods or alternatives that use more privileged information, we find that our model is capable of learning a representation that fuses multiple camera viewpoints over time and successfully tracks many vehicles and pedestrians in the dataset. Code for our model is available at https://github.com/wayveai/SOCS.
Adaptive Control of Resource Flow to Optimize Construction Work and Cash Flow via Online Deep Reinforcement Learning
Jul 20, 2023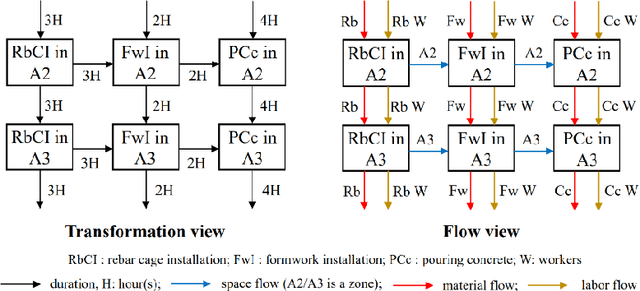
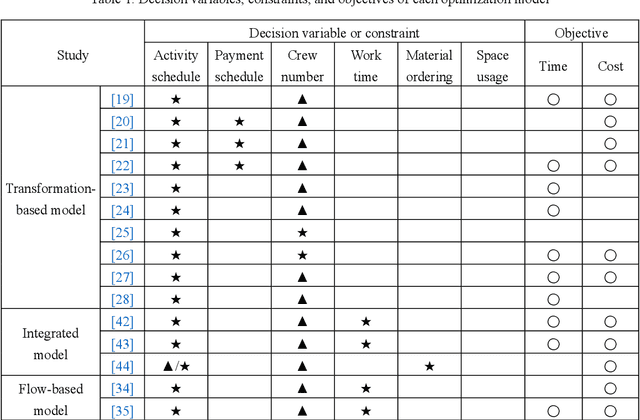
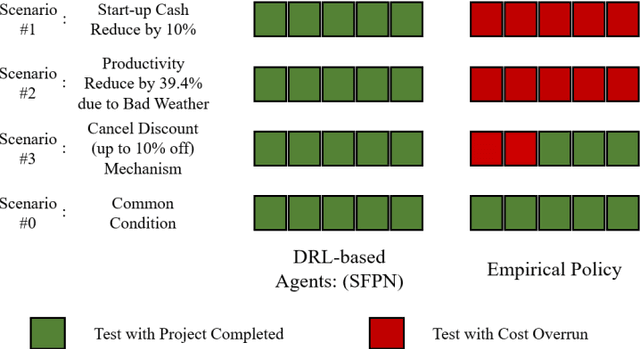

Due to complexity and dynamics of construction work, resource, and cash flows, poor management of them usually leads to time and cost overruns, bankruptcy, even project failure. Existing approaches in construction failed to achieve optimal control of resource flow in a dynamic environment with uncertainty. Therefore, this paper introducess a model and method to adaptive control the resource flows to optimize the work and cash flows of construction projects. First, a mathematical model based on a partially observable Markov decision process is established to formulate the complex interactions of construction work, resource, and cash flows as well as uncertainty and variability of diverse influence factors. Meanwhile, to efficiently find the optimal solutions, a deep reinforcement learning (DRL) based method is introduced to realize the continuous adaptive optimal control of labor and material flows, thereby optimizing the work and cash flows. To assist the training process of DRL, a simulator based on discrete event simulation is also developed to mimic the dynamic features and external environments of a project. Experiments in simulated scenarios illustrate that our method outperforms the vanilla empirical method and genetic algorithm, possesses remarkable capability in diverse projects and external environments, and a hybrid agent of DRL and empirical method leads to the best result. This paper contributes to adaptive control and optimization of coupled work, resource, and cash flows, and may serve as a step stone for adopting DRL technology in construction project management.
Fast Private Kernel Density Estimation via Locality Sensitive Quantization
Jul 04, 2023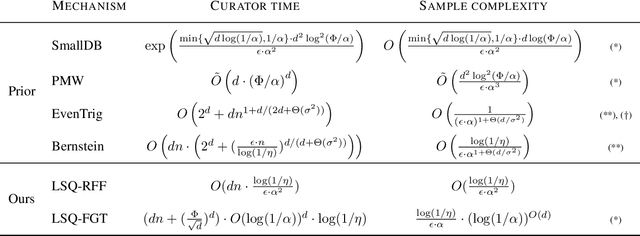
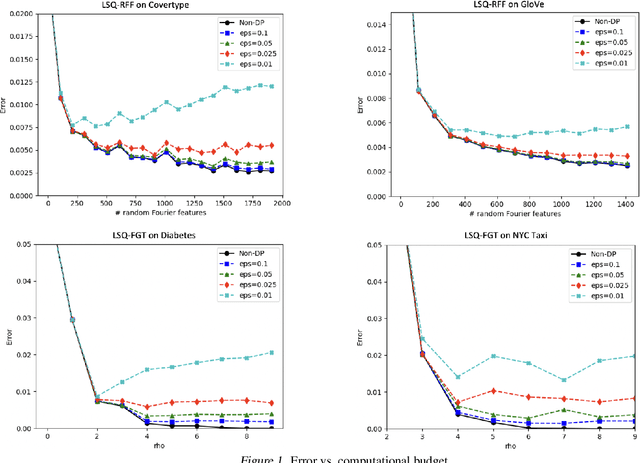
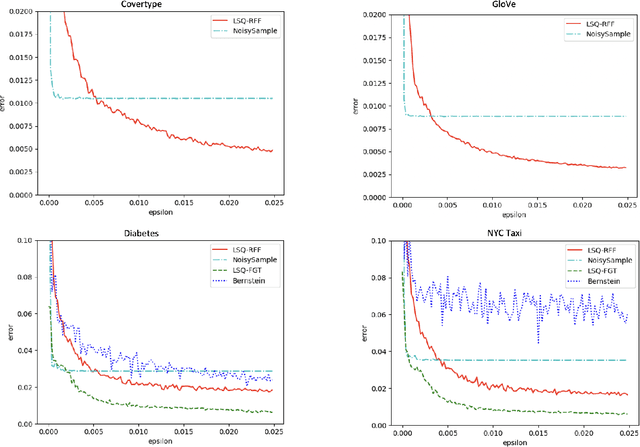
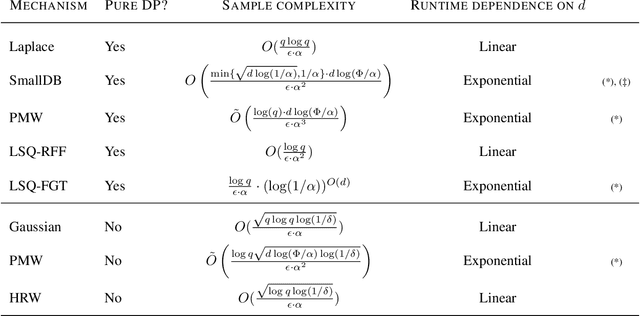
We study efficient mechanisms for differentially private kernel density estimation (DP-KDE). Prior work for the Gaussian kernel described algorithms that run in time exponential in the number of dimensions $d$. This paper breaks the exponential barrier, and shows how the KDE can privately be approximated in time linear in $d$, making it feasible for high-dimensional data. We also present improved bounds for low-dimensional data. Our results are obtained through a general framework, which we term Locality Sensitive Quantization (LSQ), for constructing private KDE mechanisms where existing KDE approximation techniques can be applied. It lets us leverage several efficient non-private KDE methods -- like Random Fourier Features, the Fast Gauss Transform, and Locality Sensitive Hashing -- and ``privatize'' them in a black-box manner. Our experiments demonstrate that our resulting DP-KDE mechanisms are fast and accurate on large datasets in both high and low dimensions.
Conformal Prediction Regions for Time Series using Linear Complementarity Programming
Apr 03, 2023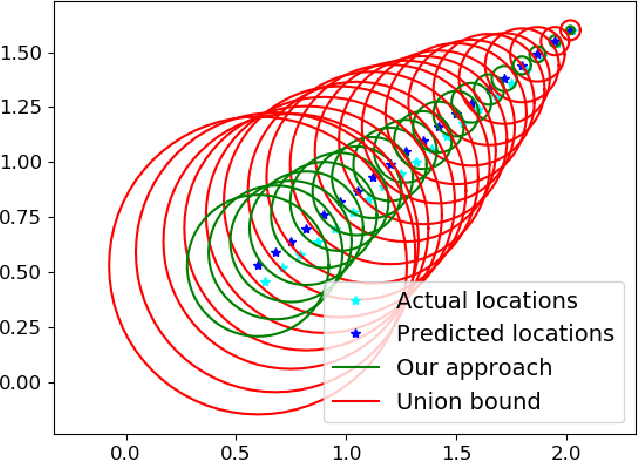
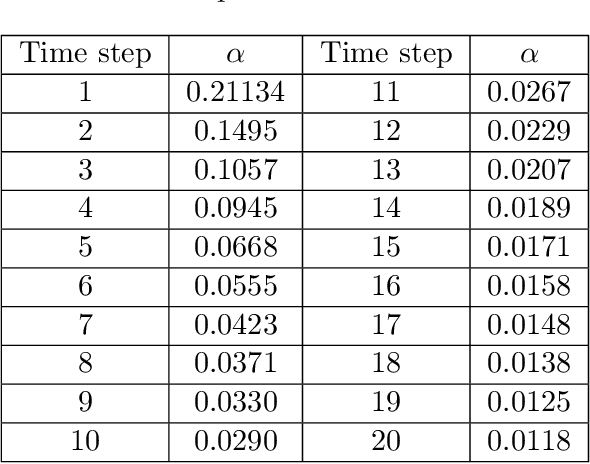
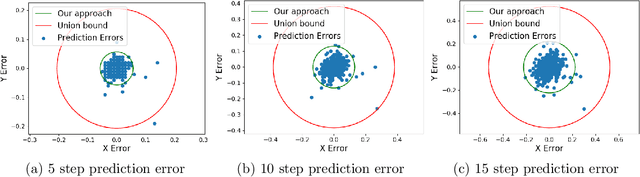
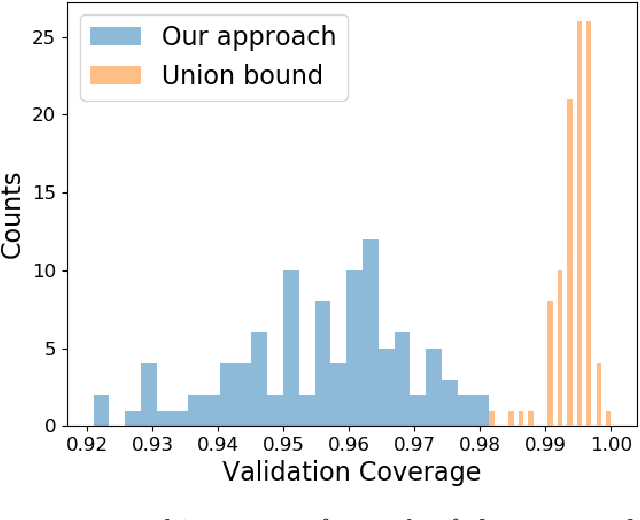
Conformal prediction is a statistical tool for producing prediction regions of machine learning models that are valid with high probability. However, applying conformal prediction to time series data leads to conservative prediction regions. In fact, to obtain prediction regions over $T$ time steps with confidence $1-\delta$, {previous works require that each individual prediction region is valid} with confidence $1-\delta/T$. We propose an optimization-based method for reducing this conservatism to enable long horizon planning and verification when using learning-enabled time series predictors. Instead of considering prediction errors individually at each time step, we consider a parameterized prediction error over multiple time steps. By optimizing the parameters over an additional dataset, we find prediction regions that are not conservative. We show that this problem can be cast as a mixed integer linear complementarity program (MILCP), which we then relax into a linear complementarity program (LCP). Additionally, we prove that the relaxed LP has the same optimal cost as the original MILCP. Finally, we demonstrate the efficacy of our method on a case study using pedestrian trajectory predictors.
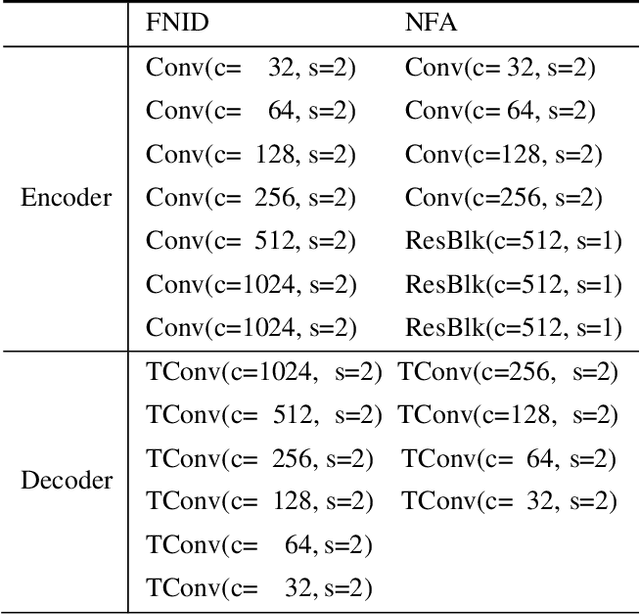
Reinforced Disentanglement for Face Swapping without Skip Connection
Jul 19, 2023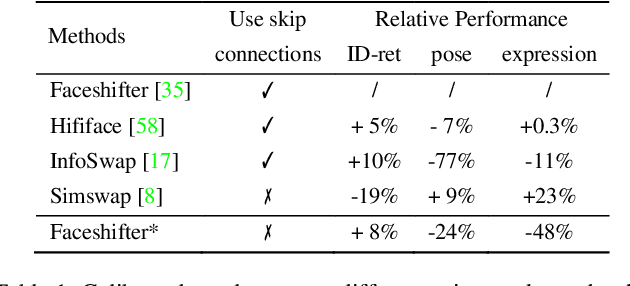
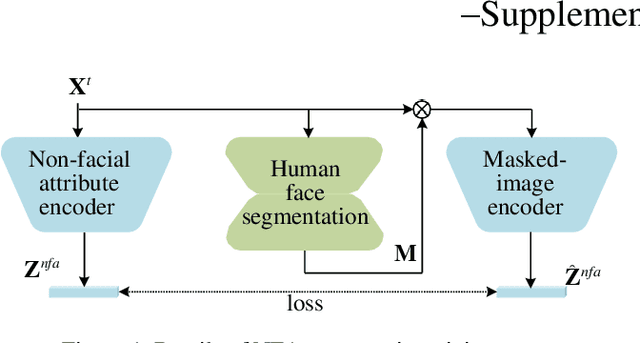

The SOTA face swap models still suffer the problem of either target identity (i.e., shape) being leaked or the target non-identity attributes (i.e., background, hair) failing to be fully preserved in the final results. We show that this insufficient disentanglement is caused by two flawed designs that were commonly adopted in prior models: (1) counting on only one compressed encoder to represent both the semantic-level non-identity facial attributes(i.e., pose) and the pixel-level non-facial region details, which is contradictory to satisfy at the same time; (2) highly relying on long skip-connections between the encoder and the final generator, leaking a certain amount of target face identity into the result. To fix them, we introduce a new face swap framework called 'WSC-swap' that gets rid of skip connections and uses two target encoders to respectively capture the pixel-level non-facial region attributes and the semantic non-identity attributes in the face region. To further reinforce the disentanglement learning for the target encoder, we employ both identity removal loss via adversarial training (i.e., GAN) and the non-identity preservation loss via prior 3DMM models like [11]. Extensive experiments on both FaceForensics++ and CelebA-HQ show that our results significantly outperform previous works on a rich set of metrics, including one novel metric for measuring identity consistency that was completely neglected before.