 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
A Kriging-Random Forest Hybrid Model for Real-time Ground Property Prediction during Earth Pressure Balance Shield Tunneling
May 09, 2023
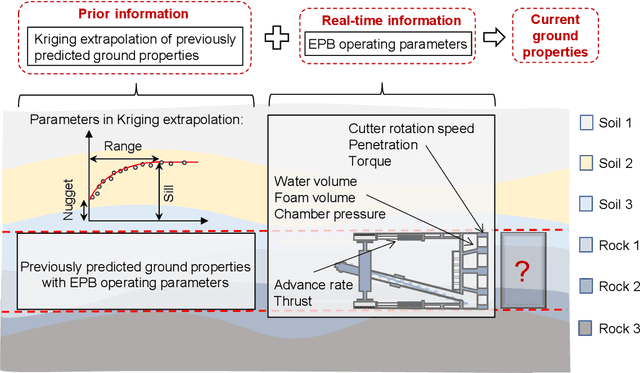
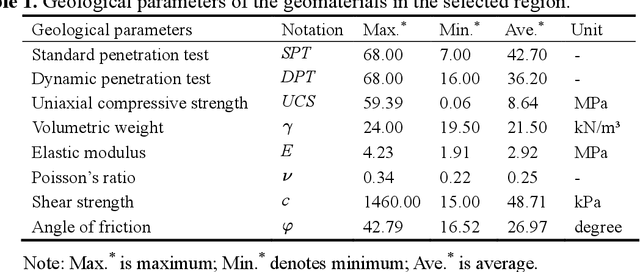
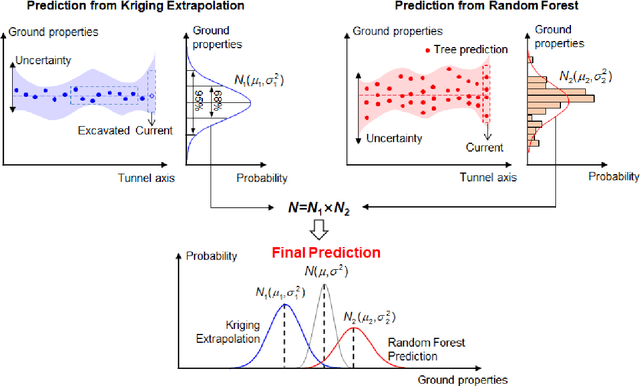
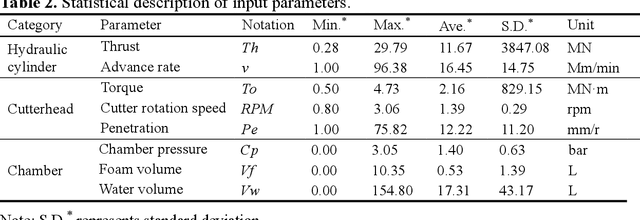
A kriging-random forest hybrid model is developed for real-time ground property prediction ahead of the earth pressure balanced shield by integrating Kriging extrapolation and random forest, which can guide shield operating parameter selection thereby mitigate construction risks. The proposed KRF algorithm synergizes two types of information: prior information and real-time information. The previously predicted ground properties with EPB operating parameters are extrapolated via the Kriging algorithm to provide prior information for the prediction of currently being excavated ground properties. The real-time information refers to the real-time operating parameters of the EPB shield, which are input into random forest to provide a real-time prediction of ground properties. The integration of these two predictions is achieved by assigning weights to each prediction according to their uncertainties, ensuring the prediction of KRF with minimum uncertainty. The performance of the KRF algorithm is assessed via a case study of the Changsha Metro Line 4 project. It reveals that the proposed KRF algorithm can predict ground properties with an accuracy of 93%, overperforming the existing algorithms of LightGBM, AdaBoost-CART, and DNN by 29%, 8%, and 12%, respectively. Another dataset from Shenzhen Metro Line 13 project is utilized to further evaluate the model generalization performance, revealing that the model can transfer its learned knowledge from one region to another with an accuracy of 89%.
Choosing Well Your Opponents: How to Guide the Synthesis of Programmatic Strategies
Jul 24, 2023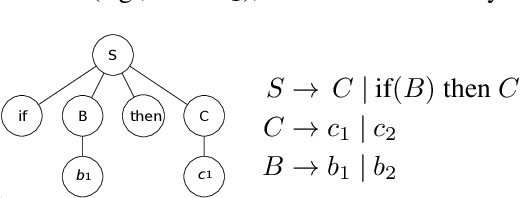
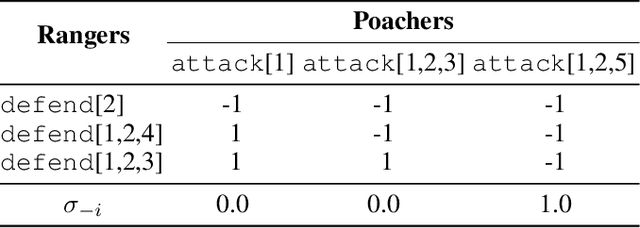
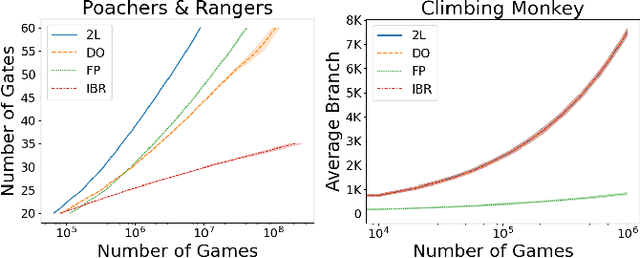
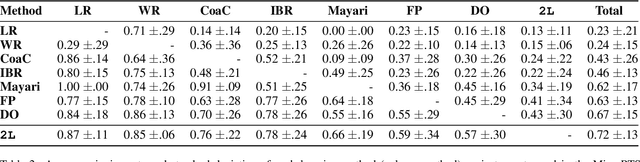
This paper introduces Local Learner (2L), an algorithm for providing a set of reference strategies to guide the search for programmatic strategies in two-player zero-sum games. Previous learning algorithms, such as Iterated Best Response (IBR), Fictitious Play (FP), and Double-Oracle (DO), can be computationally expensive or miss important information for guiding search algorithms. 2L actively selects a set of reference strategies to improve the search signal. We empirically demonstrate the advantages of our approach while guiding a local search algorithm for synthesizing strategies in three games, including MicroRTS, a challenging real-time strategy game. Results show that 2L learns reference strategies that provide a stronger search signal than IBR, FP, and DO. We also simulate a tournament of MicroRTS, where a synthesizer using 2L outperformed the winners of the two latest MicroRTS competitions, which were programmatic strategies written by human programmers.
Online Continual Learning in Keyword Spotting for Low-Resource Devices via Pooling High-Order Temporal Statistics
Jul 24, 2023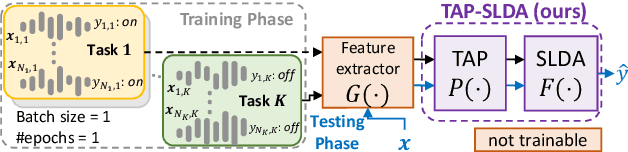
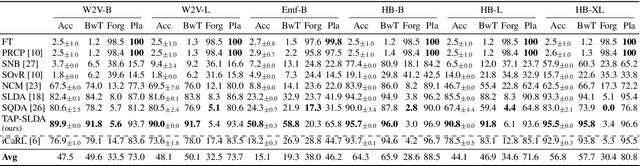
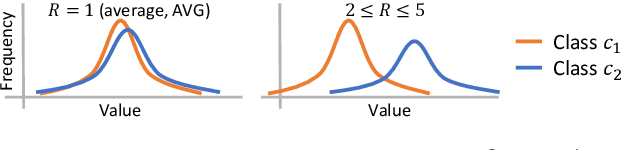
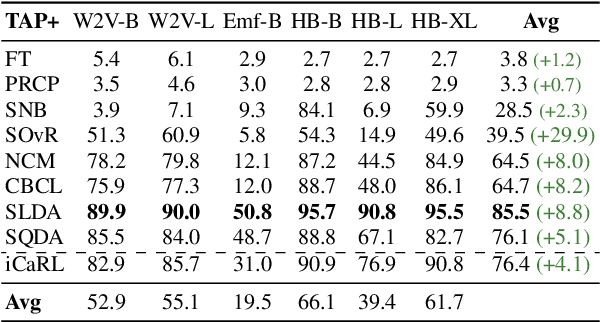
Keyword Spotting (KWS) models on embedded devices should adapt fast to new user-defined words without forgetting previous ones. Embedded devices have limited storage and computational resources, thus, they cannot save samples or update large models. We consider the setup of embedded online continual learning (EOCL), where KWS models with frozen backbone are trained to incrementally recognize new words from a non-repeated stream of samples, seen one at a time. To this end, we propose Temporal Aware Pooling (TAP) which constructs an enriched feature space computing high-order moments of speech features extracted by a pre-trained backbone. Our method, TAP-SLDA, updates a Gaussian model for each class on the enriched feature space to effectively use audio representations. In experimental analyses, TAP-SLDA outperforms competitors on several setups, backbones, and baselines, bringing a relative average gain of 11.3% on the GSC dataset.
In-Situ Thickness Measurement of Die Silicon Using Voltage Imaging for Hardware Assurance
Jul 24, 2023Hardware assurance of electronics is a challenging task and is of great interest to the government and the electronics industry. Physical inspection-based methods such as reverse engineering (RE) and Trojan scanning (TS) play an important role in hardware assurance. Therefore, there is a growing demand for automation in RE and TS. Many state-of-the-art physical inspection methods incorporate an iterative imaging and delayering workflow. In practice, uniform delayering can be challenging if the thickness of the initial layer of material is non-uniform. Moreover, this non-uniformity can reoccur at any stage during delayering and must be corrected. Therefore, it is critical to evaluate the thickness of the layers to be removed in a real-time fashion. Our proposed method uses electron beam voltage imaging, image processing, and Monte Carlo simulation to measure the thickness of remaining silicon to guide a uniform delayering process
Panel Data Nowcasting: The Case of Price-Earnings Ratios
Jul 05, 2023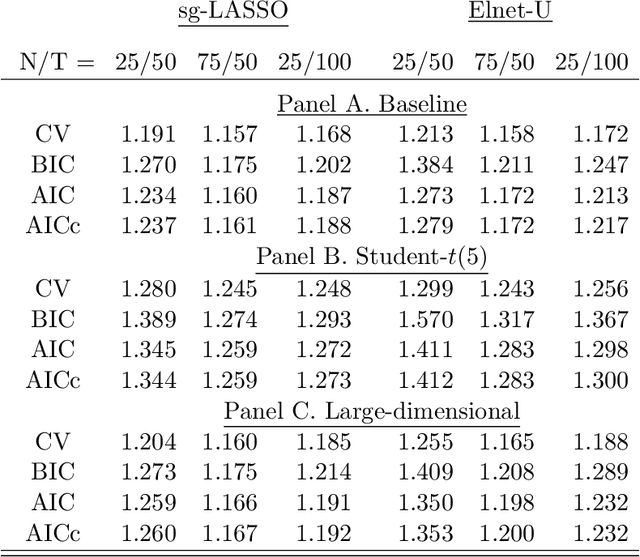
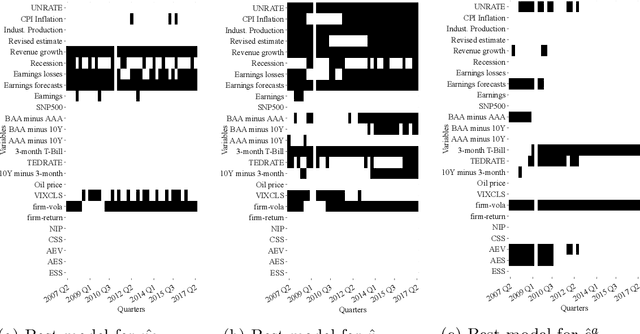
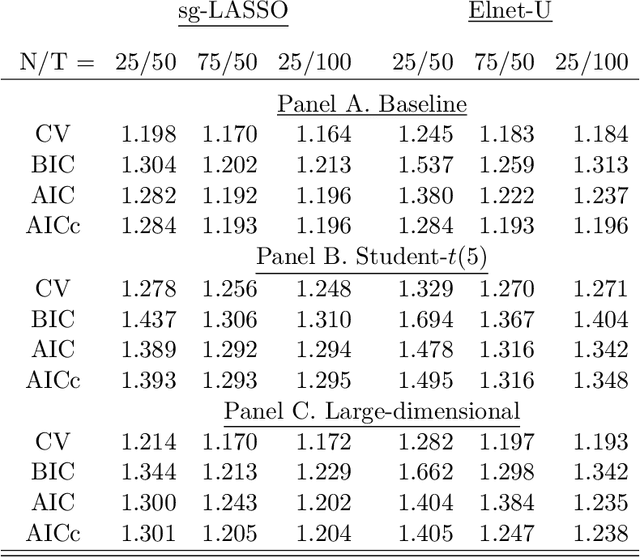
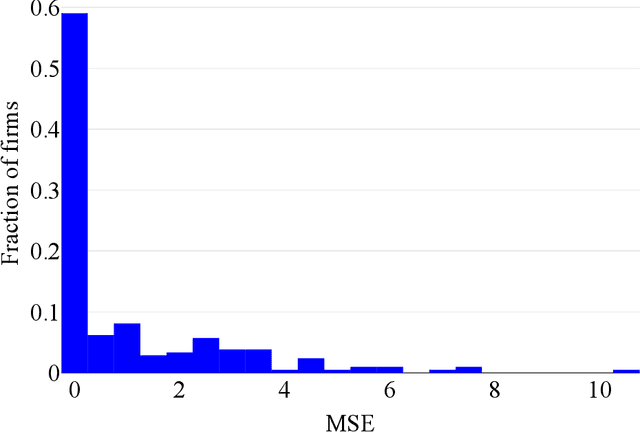
The paper uses structured machine learning regressions for nowcasting with panel data consisting of series sampled at different frequencies. Motivated by the problem of predicting corporate earnings for a large cross-section of firms with macroeconomic, financial, and news time series sampled at different frequencies, we focus on the sparse-group LASSO regularization which can take advantage of the mixed frequency time series panel data structures. Our empirical results show the superior performance of our machine learning panel data regression models over analysts' predictions, forecast combinations, firm-specific time series regression models, and standard machine learning methods.
The complexity of non-stationary reinforcement learning
Jul 13, 2023
The problem of continual learning in the domain of reinforcement learning, often called non-stationary reinforcement learning, has been identified as an important challenge to the application of reinforcement learning. We prove a worst-case complexity result, which we believe captures this challenge: Modifying the probabilities or the reward of a single state-action pair in a reinforcement learning problem requires an amount of time almost as large as the number of states in order to keep the value function up to date, unless the strong exponential time hypothesis (SETH) is false; SETH is a widely accepted strengthening of the P $\neq$ NP conjecture. Recall that the number of states in current applications of reinforcement learning is typically astronomical. In contrast, we show that just $\textit{adding}$ a new state-action pair is considerably easier to implement.
An objective validation of polyp and instrument segmentation methods in colonoscopy through Medico 2020 polyp segmentation and MedAI 2021 transparency challenges
Jul 30, 2023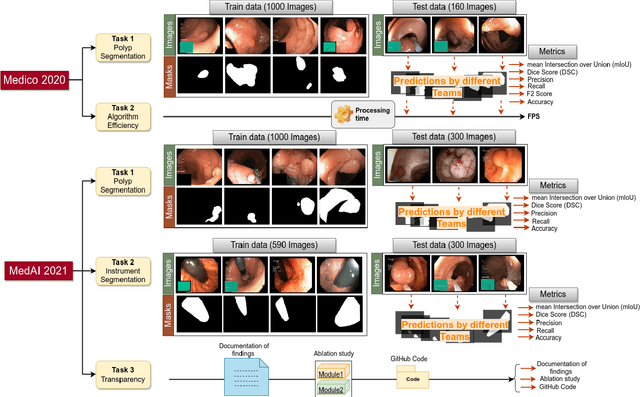
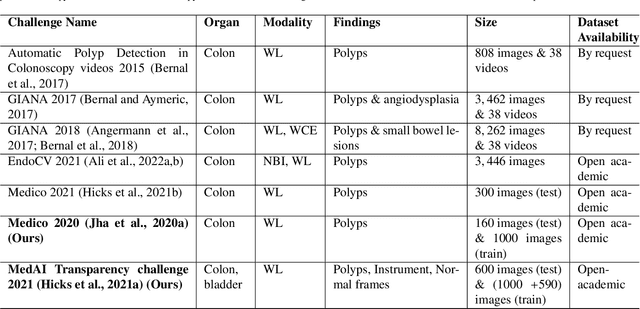
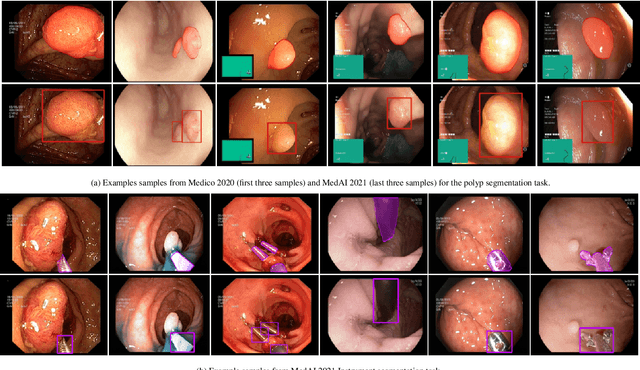
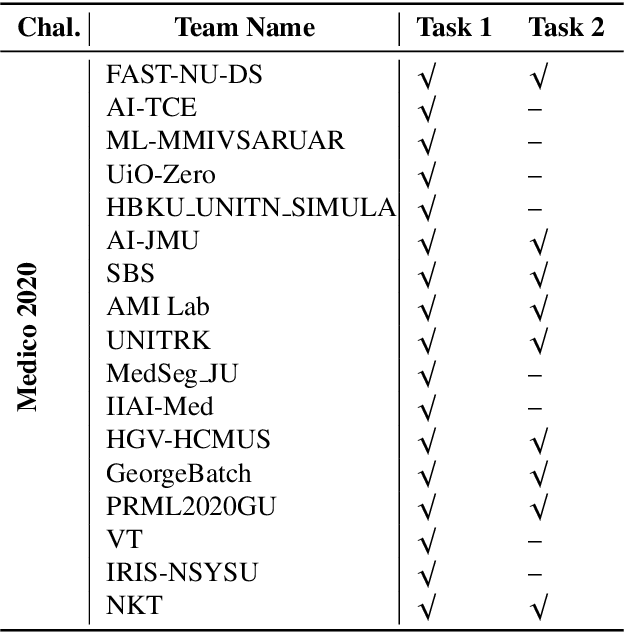
Automatic analysis of colonoscopy images has been an active field of research motivated by the importance of early detection of precancerous polyps. However, detecting polyps during the live examination can be challenging due to various factors such as variation of skills and experience among the endoscopists, lack of attentiveness, and fatigue leading to a high polyp miss-rate. Deep learning has emerged as a promising solution to this challenge as it can assist endoscopists in detecting and classifying overlooked polyps and abnormalities in real time. In addition to the algorithm's accuracy, transparency and interpretability are crucial to explaining the whys and hows of the algorithm's prediction. Further, most algorithms are developed in private data, closed source, or proprietary software, and methods lack reproducibility. Therefore, to promote the development of efficient and transparent methods, we have organized the "Medico automatic polyp segmentation (Medico 2020)" and "MedAI: Transparency in Medical Image Segmentation (MedAI 2021)" competitions. We present a comprehensive summary and analyze each contribution, highlight the strength of the best-performing methods, and discuss the possibility of clinical translations of such methods into the clinic. For the transparency task, a multi-disciplinary team, including expert gastroenterologists, accessed each submission and evaluated the team based on open-source practices, failure case analysis, ablation studies, usability and understandability of evaluations to gain a deeper understanding of the models' credibility for clinical deployment. Through the comprehensive analysis of the challenge, we not only highlight the advancements in polyp and surgical instrument segmentation but also encourage qualitative evaluation for building more transparent and understandable AI-based colonoscopy systems.
Deep Learning with Passive Optical Nonlinear Mapping
Jul 18, 2023Deep learning has fundamentally transformed artificial intelligence, but the ever-increasing complexity in deep learning models calls for specialized hardware accelerators. Optical accelerators can potentially offer enhanced performance, scalability, and energy efficiency. However, achieving nonlinear mapping, a critical component of neural networks, remains challenging optically. Here, we introduce a design that leverages multiple scattering in a reverberating cavity to passively induce optical nonlinear random mapping, without the need for additional laser power. A key advantage emerging from our work is that we show we can perform optical data compression, facilitated by multiple scattering in the cavity, to efficiently compress and retain vital information while also decreasing data dimensionality. This allows rapid optical information processing and generation of low dimensional mixtures of highly nonlinear features. These are particularly useful for applications demanding high-speed analysis and responses such as in edge computing devices. Utilizing rapid optical information processing capabilities, our optical platforms could potentially offer more efficient and real-time processing solutions for a broad range of applications. We demonstrate the efficacy of our design in improving computational performance across tasks, including classification, image reconstruction, key-point detection, and object detection, all achieved through optical data compression combined with a digital decoder. Notably, we observed high performance, at an extreme compression ratio, for real-time pedestrian detection. Our findings pave the way for novel algorithms and architectural designs for optical computing.
Implementation and Evaluation of Networked Model Predictive Control System on Universal Robot
Jul 18, 2023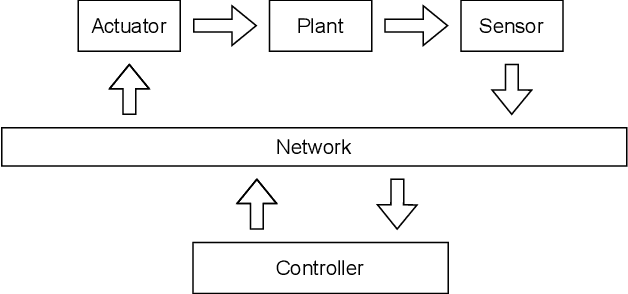
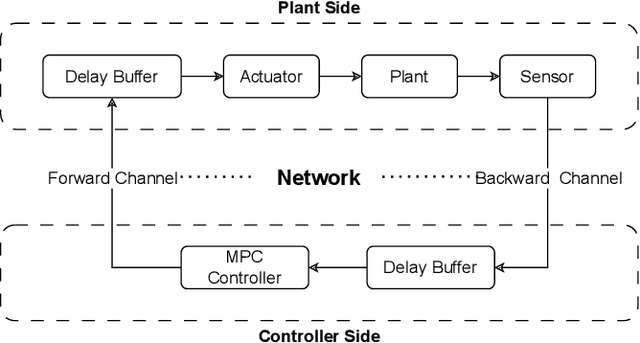
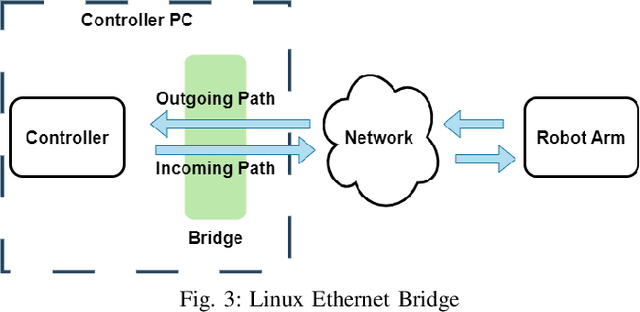
Networked control systems are closed-loop feedback control systems containing system components that may be distributed geographically in different locations and interconnected via a communication network such as the Internet. The quality of network communication is a crucial factor that significantly affects the performance of remote control. This is due to the fact that network uncertainties can occur in the transmission of packets in the forward and backward channels of the system. The two most significant among these uncertainties are network time delay and packet loss. To overcome these challenges, the networked predictive control system has been proposed to provide improved performance and robustness using predictive controllers and compensation strategies. In particular, the model predictive control method is well-suited as an advanced approach compared to conventional methods. In this paper, a networked model predictive control system consisting of a model predictive control method and compensation strategies is implemented to control and stabilize a robot arm as a physical system. In particular, this work aims to analyze the performance of the system under the influence of network time delay and packet loss. Using appropriate performance and robustness metrics, an in-depth investigation of the impacts of these network uncertainties is performed. Furthermore, the forward and backward channels of the network are examined in detail in this study.
AudioInceptionNeXt: TCL AI LAB Submission to EPIC-SOUND Audio-Based-Interaction-Recognition Challenge 2023
Jul 14, 2023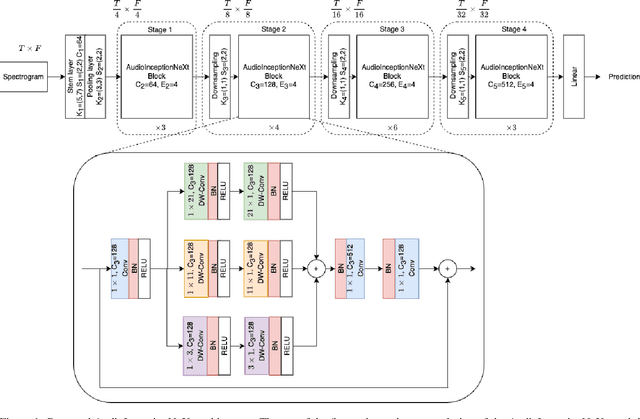
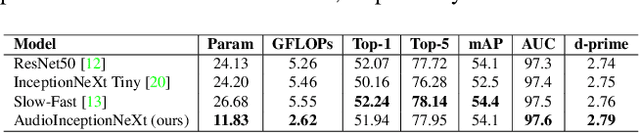

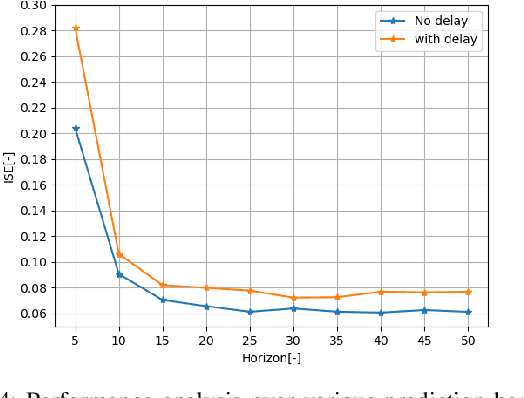
This report presents the technical details of our submission to the 2023 Epic-Kitchen EPIC-SOUNDS Audio-Based Interaction Recognition Challenge. The task is to learn the mapping from audio samples to their corresponding action labels. To achieve this goal, we propose a simple yet effective single-stream CNN-based architecture called AudioInceptionNeXt that operates on the time-frequency log-mel-spectrogram of the audio samples. Motivated by the design of the InceptionNeXt, we propose parallel multi-scale depthwise separable convolutional kernels in the AudioInceptionNeXt block, which enable the model to learn the time and frequency information more effectively. The large-scale separable kernels capture the long duration of activities and the global frequency semantic information, while the small-scale separable kernels capture the short duration of activities and local details of frequency information. Our approach achieved 55.43% of top-1 accuracy on the challenge test set, ranked as 1st on the public leaderboard. Codes are available anonymously at https://github.com/StevenLauHKHK/AudioInceptionNeXt.git.