 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Explainable Cost-Sensitive Deep Neural Networks for Brain Tumor Detection from Brain MRI Images considering Data Imbalance
Aug 01, 2023
This paper presents a research study on the use of Convolutional Neural Network (CNN), ResNet50, InceptionV3, EfficientNetB0 and NASNetMobile models to efficiently detect brain tumors in order to reduce the time required for manual review of the report and create an automated system for classifying brain tumors. An automated pipeline is proposed, which encompasses five models: CNN, ResNet50, InceptionV3, EfficientNetB0 and NASNetMobile. The performance of the proposed architecture is evaluated on a balanced dataset and found to yield an accuracy of 99.33% for fine-tuned InceptionV3 model. Furthermore, Explainable AI approaches are incorporated to visualize the model's latent behavior in order to understand its black box behavior. To further optimize the training process, a cost-sensitive neural network approach has been proposed in order to work with imbalanced datasets which has achieved almost 4% more accuracy than the conventional models used in our experiments. The cost-sensitive InceptionV3 (CS-InceptionV3) and CNN (CS-CNN) show a promising accuracy of 92.31% and a recall value of 1.00 respectively on an imbalanced dataset. The proposed models have shown great potential in improving tumor detection accuracy and must be further developed for application in practical solutions. We have provided the datasets and made our implementations publicly available at - https://github.com/shahariar-shibli/Explainable-Cost-Sensitive-Deep-Neural-Networks-for-Brain-Tumor-Detection-from-Brain-MRI-Images
Variational Label-Correlation Enhancement for Congestion Prediction
Aug 01, 2023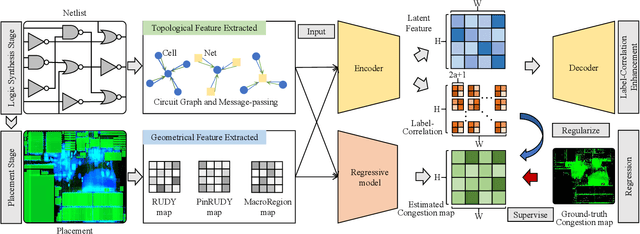
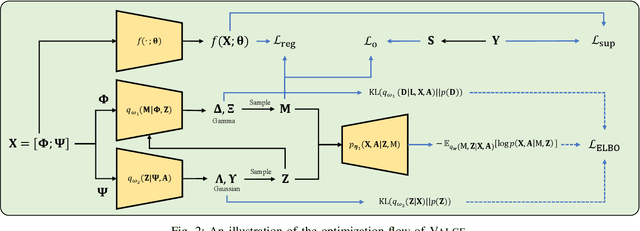
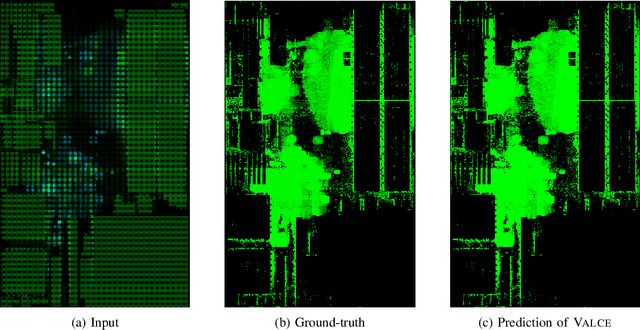
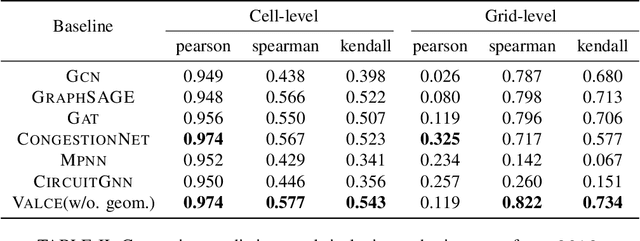
The physical design process of large-scale designs is a time-consuming task, often requiring hours to days to complete, with routing being the most critical and complex step. As the the complexity of Integrated Circuits (ICs) increases, there is an increased demand for accurate routing quality prediction. Accurate congestion prediction aids in identifying design flaws early on, thereby accelerating circuit design and conserving resources. Despite the advancements in current congestion prediction methodologies, an essential aspect that has been largely overlooked is the spatial label-correlation between different grids in congestion prediction. The spatial label-correlation is a fundamental characteristic of circuit design, where the congestion status of a grid is not isolated but inherently influenced by the conditions of its neighboring grids. In order to fully exploit the inherent spatial label-correlation between neighboring grids, we propose a novel approach, {\ours}, i.e., VAriational Label-Correlation Enhancement for Congestion Prediction, which considers the local label-correlation in the congestion map, associating the estimated congestion value of each grid with a local label-correlation weight influenced by its surrounding grids. {\ours} leverages variational inference techniques to estimate this weight, thereby enhancing the regression model's performance by incorporating spatial dependencies. Experiment results validate the superior effectiveness of {\ours} on the public available \texttt{ISPD2011} and \texttt{DAC2012} benchmarks using the superblue circuit line.
Towards an architectural framework for intelligent virtual agents using probabilistic programming
Jul 20, 2023We present a new framework called KorraAI for conceiving and building embodied conversational agents (ECAs). Our framework models ECAs' behavior considering contextual information, for example, about environment and interaction time, and uncertain information provided by the human interaction partner. Moreover, agents built with KorraAI can show proactive behavior, as they can initiate interactions with human partners. For these purposes, KorraAI exploits probabilistic programming. Probabilistic models in KorraAI are used to model its behavior and interactions with the user. They enable adaptation to the user's preferences and a certain degree of indeterminism in the ECAs to achieve more natural behavior. Human-like internal states, such as moods, preferences, and emotions (e.g., surprise), can be modeled in KorraAI with distributions and Bayesian networks. These models can evolve over time, even without interaction with the user. ECA models are implemented as plugins and share a common interface. This enables ECA designers to focus more on the character they are modeling and less on the technical details, as well as to store and exchange ECA models. Several applications of KorraAI ECAs are possible, such as virtual sales agents, customer service agents, virtual companions, entertainers, or tutors.
Holistic Exploration on Universal Decompositional Semantic Parsing: Architecture, Data Augmentation, and LLM Paradigm
Jul 25, 2023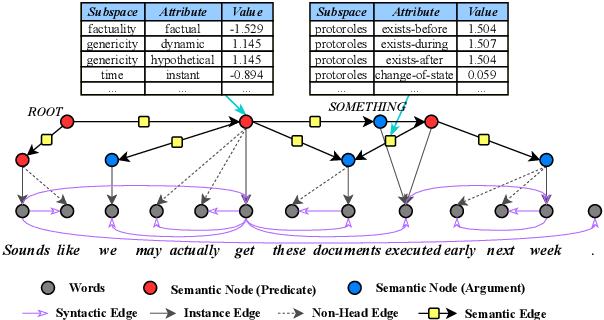
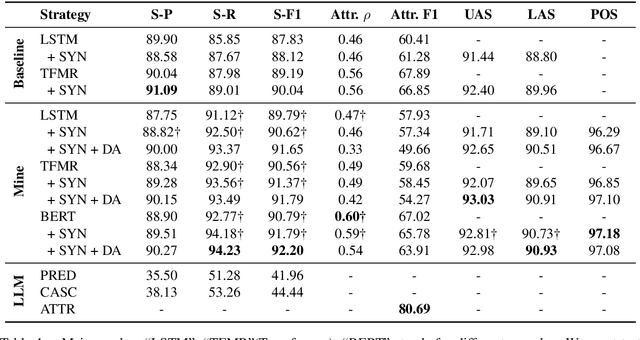
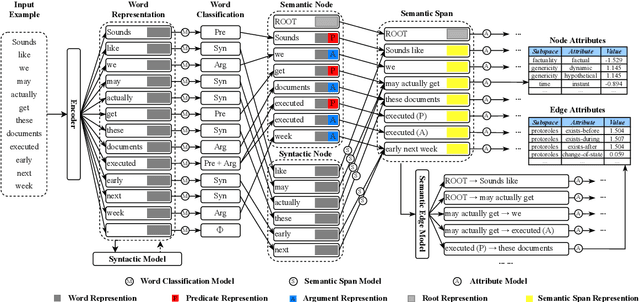
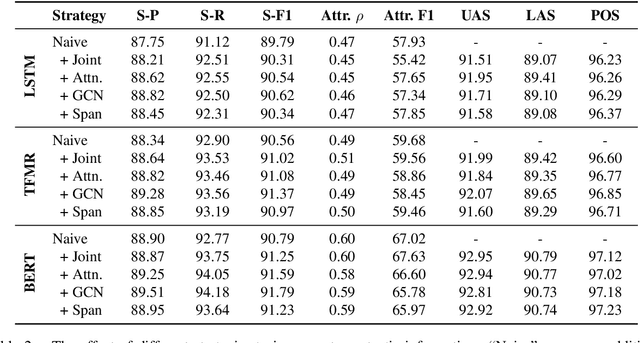
In this paper, we conduct a holistic exploration of the Universal Decompositional Semantic (UDS) Parsing. We first introduce a cascade model for UDS parsing that decomposes the complex parsing task into semantically appropriate subtasks. Our approach outperforms the prior models, while significantly reducing inference time. We also incorporate syntactic information and further optimized the architecture. Besides, different ways for data augmentation are explored, which further improve the UDS Parsing. Lastly, we conduct experiments to investigate the efficacy of ChatGPT in handling the UDS task, revealing that it excels in attribute parsing but struggles in relation parsing, and using ChatGPT for data augmentation yields suboptimal results. Our code is available at https://github.com/hexuandeng/HExp4UDS.
UniVTG: Towards Unified Video-Language Temporal Grounding
Jul 31, 2023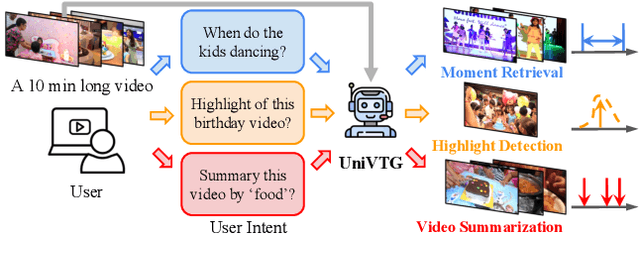
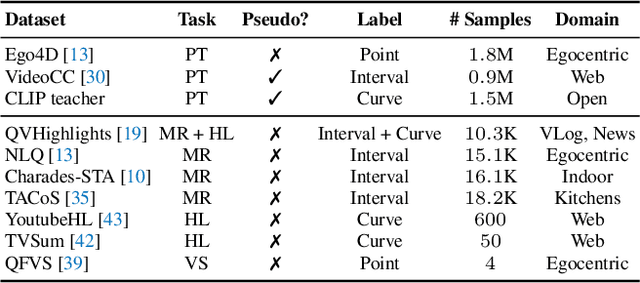
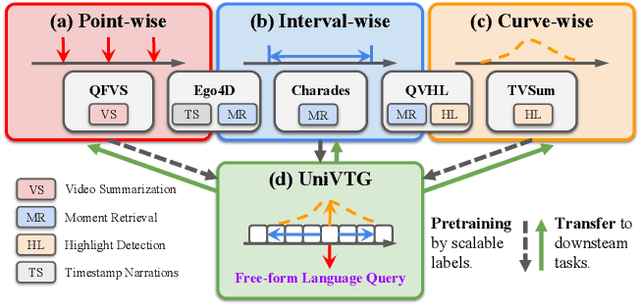
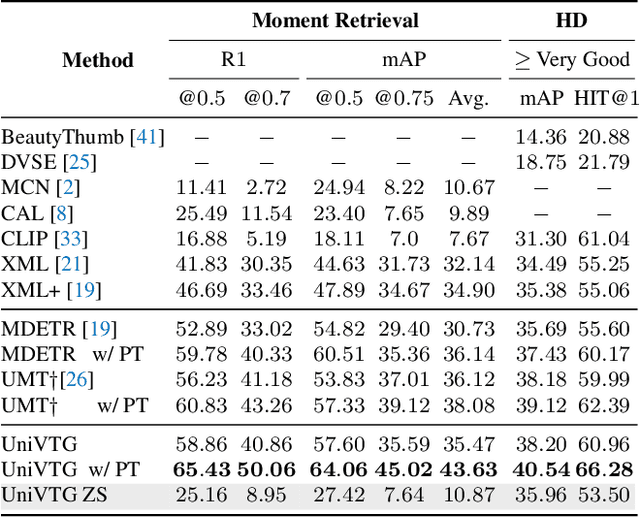
Video Temporal Grounding (VTG), which aims to ground target clips from videos (such as consecutive intervals or disjoint shots) according to custom language queries (e.g., sentences or words), is key for video browsing on social media. Most methods in this direction develop taskspecific models that are trained with type-specific labels, such as moment retrieval (time interval) and highlight detection (worthiness curve), which limits their abilities to generalize to various VTG tasks and labels. In this paper, we propose to Unify the diverse VTG labels and tasks, dubbed UniVTG, along three directions: Firstly, we revisit a wide range of VTG labels and tasks and define a unified formulation. Based on this, we develop data annotation schemes to create scalable pseudo supervision. Secondly, we develop an effective and flexible grounding model capable of addressing each task and making full use of each label. Lastly, thanks to the unified framework, we are able to unlock temporal grounding pretraining from large-scale diverse labels and develop stronger grounding abilities e.g., zero-shot grounding. Extensive experiments on three tasks (moment retrieval, highlight detection and video summarization) across seven datasets (QVHighlights, Charades-STA, TACoS, Ego4D, YouTube Highlights, TVSum, and QFVS) demonstrate the effectiveness and flexibility of our proposed framework. The codes are available at https://github.com/showlab/UniVTG.
TrackAgent: 6D Object Tracking via Reinforcement Learning
Jul 28, 2023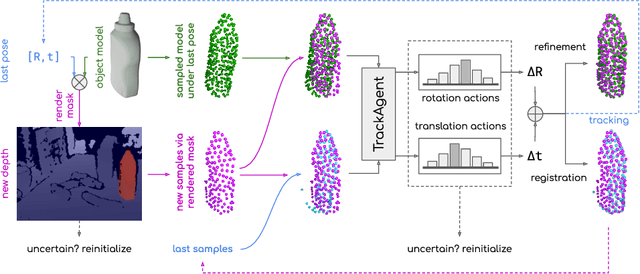
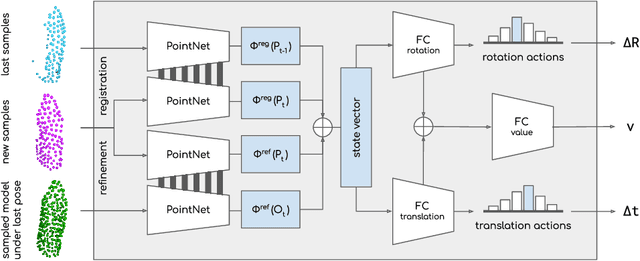
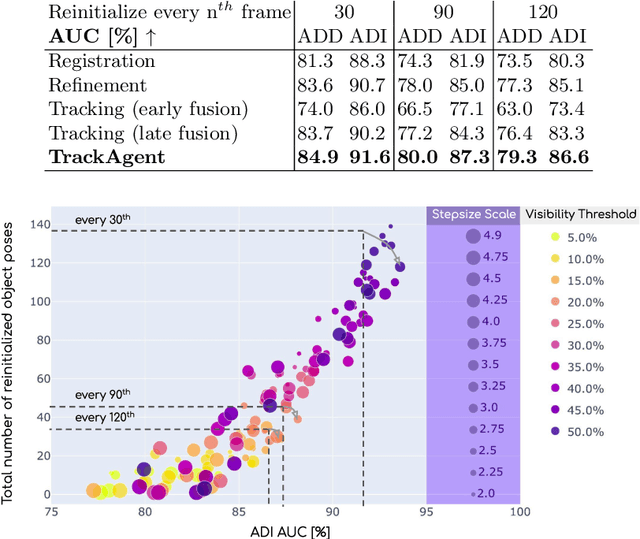
Tracking an object's 6D pose, while either the object itself or the observing camera is moving, is important for many robotics and augmented reality applications. While exploiting temporal priors eases this problem, object-specific knowledge is required to recover when tracking is lost. Under the tight time constraints of the tracking task, RGB(D)-based methods are often conceptionally complex or rely on heuristic motion models. In comparison, we propose to simplify object tracking to a reinforced point cloud (depth only) alignment task. This allows us to train a streamlined approach from scratch with limited amounts of sparse 3D point clouds, compared to the large datasets of diverse RGBD sequences required in previous works. We incorporate temporal frame-to-frame registration with object-based recovery by frame-to-model refinement using a reinforcement learning (RL) agent that jointly solves for both objectives. We also show that the RL agent's uncertainty and a rendering-based mask propagation are effective reinitialization triggers.
Perpetual Humanoid Control for Real-time Simulated Avatars
May 10, 2023
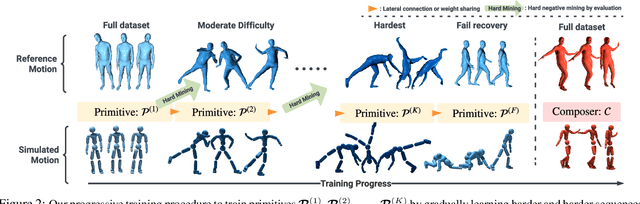
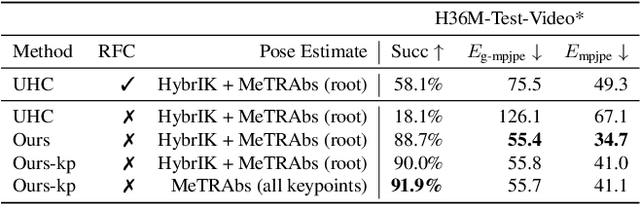
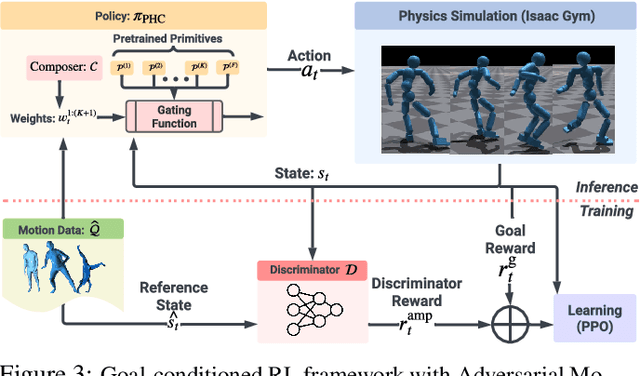
We present a physics-based humanoid controller that achieves high-fidelity motion imitation and fault-tolerant behavior in the presence of noisy input (e.g. pose estimates from video or generated from language) and unexpected falls. Our controller scales up to learning ten thousand motion clips without using any external stabilizing forces and learns to naturally recover from fail-state. Given reference motion, our controller can perpetually control simulated avatars without requiring resets. At its core, we propose the progressive multiplicative control policy (PMCP), which dynamically allocates new network capacity to learn harder and harder motion sequences. PMCP allows efficient scaling for learning from large-scale motion databases and adding new tasks, such as fail-state recovery, without catastrophic forgetting. We demonstrate the effectiveness of our controller by using it to imitate noisy poses from video-based pose estimators and language-based motion generators in a live and real-time multi-person avatar use case.
Improving Primary Healthcare Workflow Using Extreme Summarization of Scientific Literature Based on Generative AI
Jul 24, 2023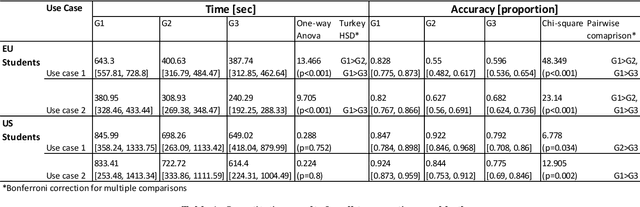
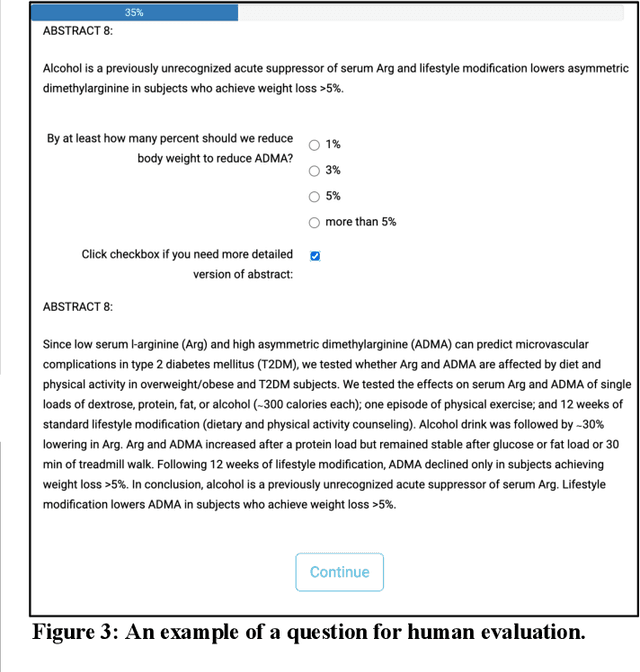
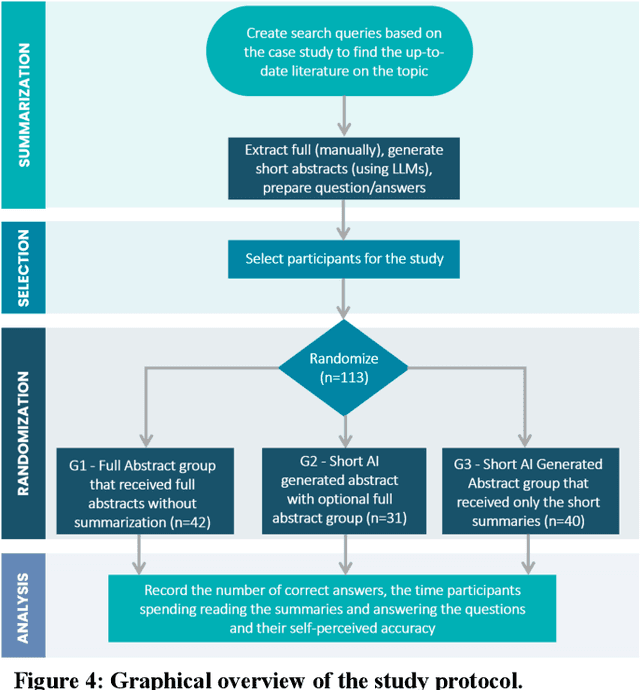
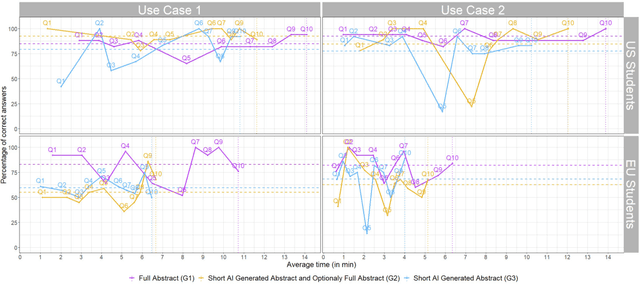
Primary care professionals struggle to keep up to date with the latest scientific literature critical in guiding evidence-based practice related to their daily work. To help solve the above-mentioned problem, we employed generative artificial intelligence techniques based on large-scale language models to summarize abstracts of scientific papers. Our objective is to investigate the potential of generative artificial intelligence in diminishing the cognitive load experienced by practitioners, thus exploring its ability to alleviate mental effort and burden. The study participants were provided with two use cases related to preventive care and behavior change, simulating a search for new scientific literature. The study included 113 university students from Slovenia and the United States randomized into three distinct study groups. The first group was assigned to the full abstracts. The second group was assigned to the short abstracts generated by AI. The third group had the option to select a full abstract in addition to the AI-generated short summary. Each use case study included ten retrieved abstracts. Our research demonstrates that the use of generative AI for literature review is efficient and effective. The time needed to answer questions related to the content of abstracts was significantly lower in groups two and three compared to the first group using full abstracts. The results, however, also show significantly lower accuracy in extracted knowledge in cases where full abstract was not available. Such a disruptive technology could significantly reduce the time required for healthcare professionals to keep up with the most recent scientific literature; nevertheless, further developments are needed to help them comprehend the knowledge accurately.
Contrastive Multi-FaceForensics: An End-to-end Bi-grained Contrastive Learning Approach for Multi-face Forgery Detection
Aug 03, 2023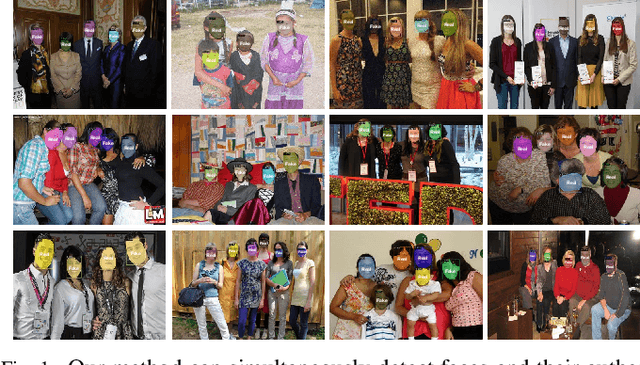
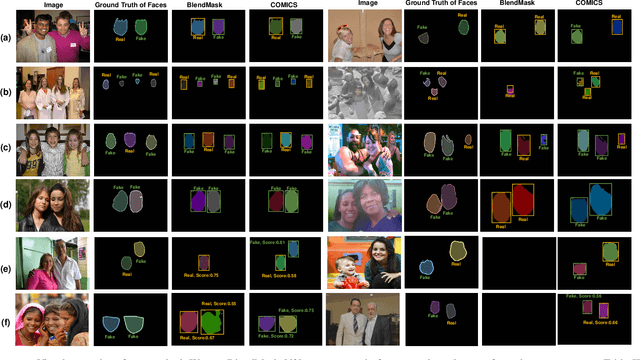

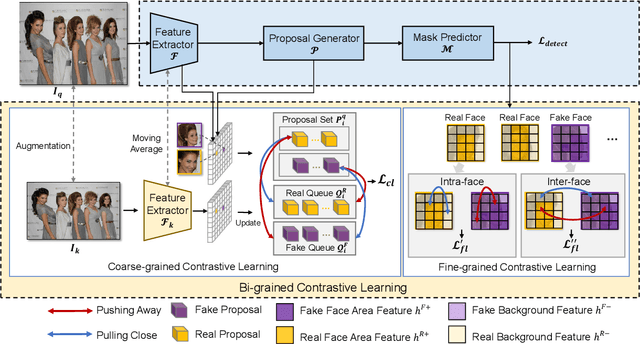
DeepFakes have raised serious societal concerns, leading to a great surge in detection-based forensics methods in recent years. Face forgery recognition is the conventional detection method that usually follows a two-phase pipeline: it extracts the face first and then determines its authenticity by classification. Since DeepFakes in the wild usually contain multiple faces, using face forgery detection methods is merely practical as they have to process faces in a sequel, i.e., only one face is processed at the same time. One straightforward way to address this issue is to integrate face extraction and forgery detection in an end-to-end fashion by adapting advanced object detection architectures. However, as these object detection architectures are designed to capture the semantic information of different object categories rather than the subtle forgery traces among the faces, the direct adaptation is far from optimal. In this paper, we describe a new end-to-end framework, Contrastive Multi-FaceForensics (COMICS), to enhance multi-face forgery detection. The core of the proposed framework is a novel bi-grained contrastive learning approach that explores effective face forgery traces at both the coarse- and fine-grained levels. Specifically, the coarse-grained level contrastive learning captures the discriminative features among positive and negative proposal pairs in multiple scales with the instruction of the proposal generator, and the fine-grained level contrastive learning captures the pixel-wise discrepancy between the forged and original areas of the same face and the pixel-wise content inconsistency between different faces. Extensive experiments on the OpenForensics dataset demonstrate our method outperforms other counterparts by a large margin (~18.5%) and shows great potential for integration into various architectures.
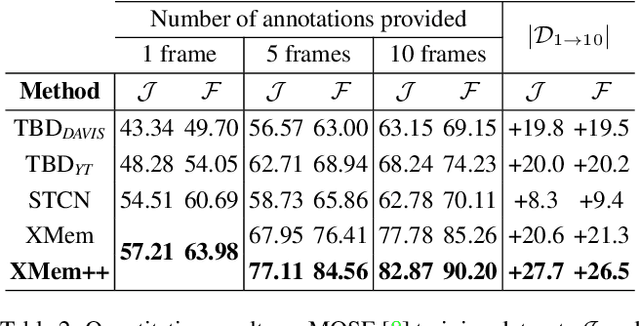
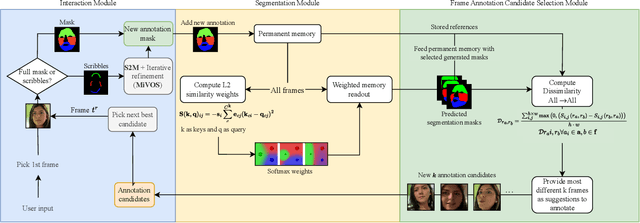
XMem++: Production-level Video Segmentation From Few Annotated Frames
Jul 29, 2023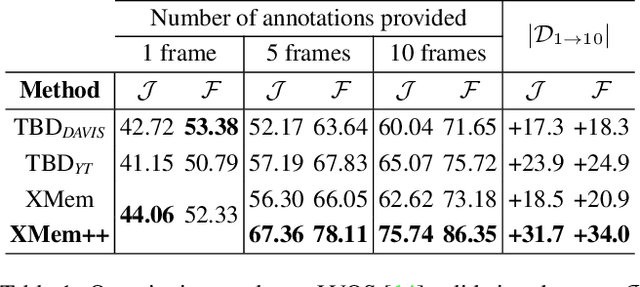
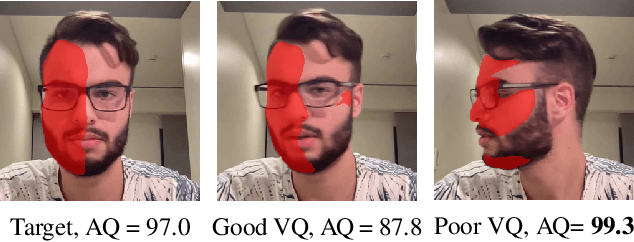
Despite advancements in user-guided video segmentation, extracting complex objects consistently for highly complex scenes is still a labor-intensive task, especially for production. It is not uncommon that a majority of frames need to be annotated. We introduce a novel semi-supervised video object segmentation (SSVOS) model, XMem++, that improves existing memory-based models, with a permanent memory module. Most existing methods focus on single frame annotations, while our approach can effectively handle multiple user-selected frames with varying appearances of the same object or region. Our method can extract highly consistent results while keeping the required number of frame annotations low. We further introduce an iterative and attention-based frame suggestion mechanism, which computes the next best frame for annotation. Our method is real-time and does not require retraining after each user input. We also introduce a new dataset, PUMaVOS, which covers new challenging use cases not found in previous benchmarks. We demonstrate SOTA performance on challenging (partial and multi-class) segmentation scenarios as well as long videos, while ensuring significantly fewer frame annotations than any existing method.