 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
STAR-RIS Aided MISO SWIPT-NOMA System with Energy Buffer: Performance Analysis and Optimization
Aug 18, 2023
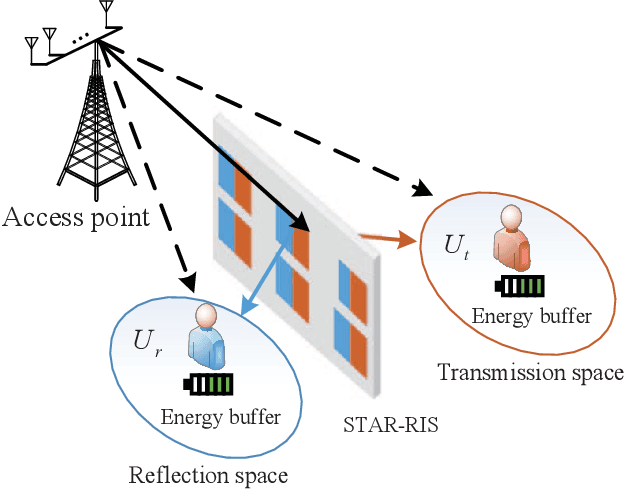
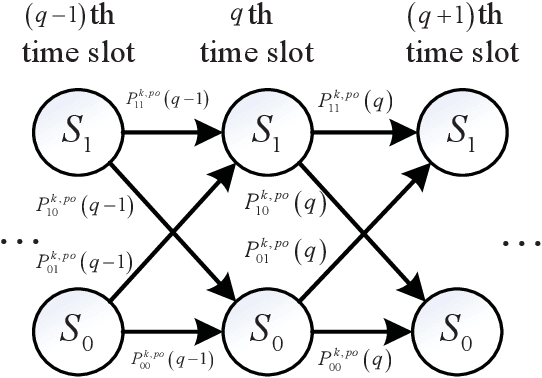
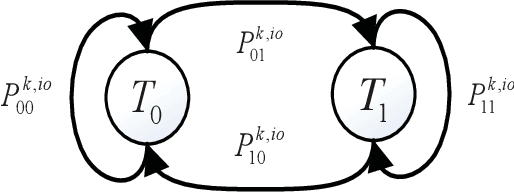
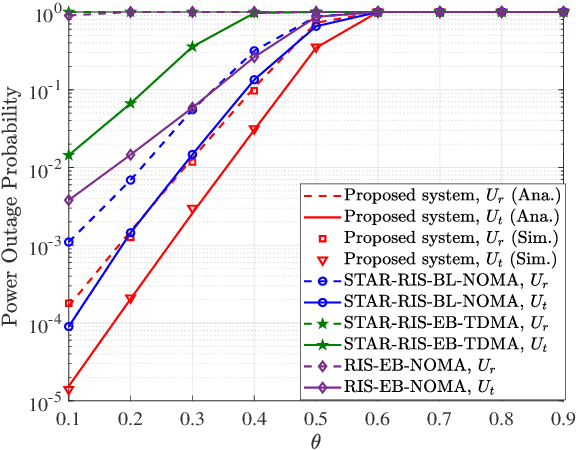
In this paper, we propose a simultaneous transmitting and reflecting reconfigurable intelligent surface (STAR-RIS) and energy buffer aided multiple-input single-output (MISO) simultaneous wireless information and power transfer (SWIPT) non-orthogonal multiple access (NOMA) system, which consists of a STAR-RIS, an access point (AP), and reflection users and transmission users with energy buffers. In the proposed system, the multi-antenna AP can transmit information and energy to several single-antenna reflection and transmission users simultaneously in a NOMA fashion, where the power transfer and information transmission states of the users are modeled using Markov chains. The reflection and transmission users harvest and store the energy in energy buffers as additional power supplies. The power outage probability, information outage probability, sum throughput, and joint outage probability closed-form expressions of the proposed system are derived over Nakagami-m fading channels, which are validated via simulations. Results demonstrate that the proposed system achieves better performance in comparison to the STAR-RIS aided MISO SWIPT-NOMA buffer-less, conventional RIS and energy buffer aided MISO SWIPT-NOMA, and STAR-RIS and energy buffer aided MISO SWIPT-time-division multiple access (TDMA) systems. Furthermore, a particle swarm optimization based power allocation (PSO-PA) algorithm is designed to maximize the sum throughput with a constraint on the joint outage probability. Simulation results illustrate that the proposed PSO-PA algorithm can achieve an improved sum throughput performance of the proposed system.
A Deep Learning Approach for Overall Survival Prediction in Lung Cancer with Missing Values
Jul 28, 2023One of the most challenging fields where Artificial Intelligence (AI) can be applied is lung cancer research, specifically non-small cell lung cancer (NSCLC). In particular, overall survival (OS), the time between diagnosis and death, is a vital indicator of patient status, enabling tailored treatment and improved OS rates. In this analysis, there are two challenges to take into account. First, few studies effectively exploit the information available from each patient, leveraging both uncensored (i.e., dead) and censored (i.e., survivors) patients, considering also the events' time. Second, the handling of incomplete data is a common issue in the medical field. This problem is typically tackled through the use of imputation methods. Our objective is to present an AI model able to overcome these limits, effectively learning from both censored and uncensored patients and their available features, for the prediction of OS for NSCLC patients. We present a novel approach to survival analysis with missing values in the context of NSCLC, which exploits the strengths of the transformer architecture to account only for available features without requiring any imputation strategy. By making use of ad-hoc losses for OS, it is able to account for both censored and uncensored patients, as well as changes in risks over time. We compared our method with state-of-the-art models for survival analysis coupled with different imputation strategies. We evaluated the results obtained over a period of 6 years using different time granularities obtaining a Ct-index, a time-dependent variant of the C-index, of 71.97, 77.58 and 80.72 for time units of 1 month, 1 year and 2 years, respectively, outperforming all state-of-the-art methods regardless of the imputation method used.
ZADU: A Python Library for Evaluating the Reliability of Dimensionality Reduction Embeddings
Aug 01, 2023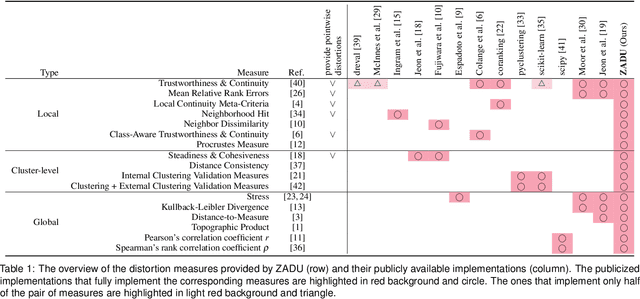
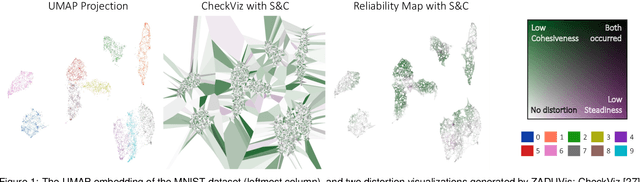
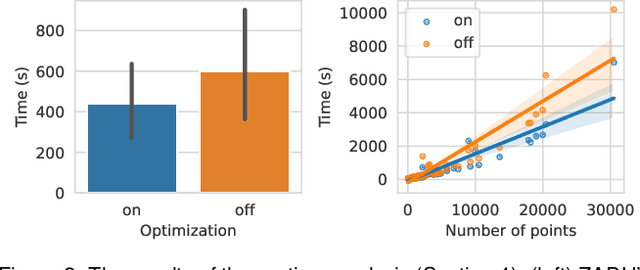
Dimensionality reduction (DR) techniques inherently distort the original structure of input high-dimensional data, producing imperfect low-dimensional embeddings. Diverse distortion measures have thus been proposed to evaluate the reliability of DR embeddings. However, implementing and executing distortion measures in practice has so far been time-consuming and tedious. To address this issue, we present ZADU, a Python library that provides distortion measures. ZADU is not only easy to install and execute but also enables comprehensive evaluation of DR embeddings through three key features. First, the library covers a wide range of distortion measures. Second, it automatically optimizes the execution of distortion measures, substantially reducing the running time required to execute multiple measures. Last, the library informs how individual points contribute to the overall distortions, facilitating the detailed analysis of DR embeddings. By simulating a real-world scenario of optimizing DR embeddings, we verify that our optimization scheme substantially reduces the time required to execute distortion measures. Finally, as an application of ZADU, we present another library called ZADUVis that allows users to easily create distortion visualizations that depict the extent to which each region of an embedding suffers from distortions.
Client: Cross-variable Linear Integrated Enhanced Transformer for Multivariate Long-Term Time Series Forecasting
May 30, 2023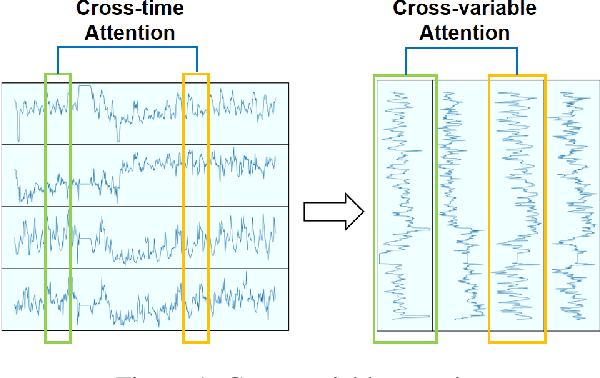
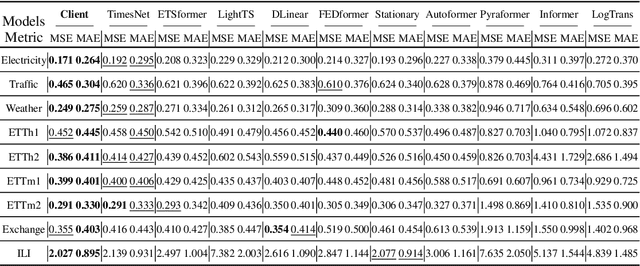
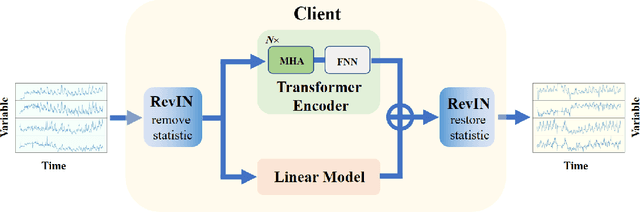
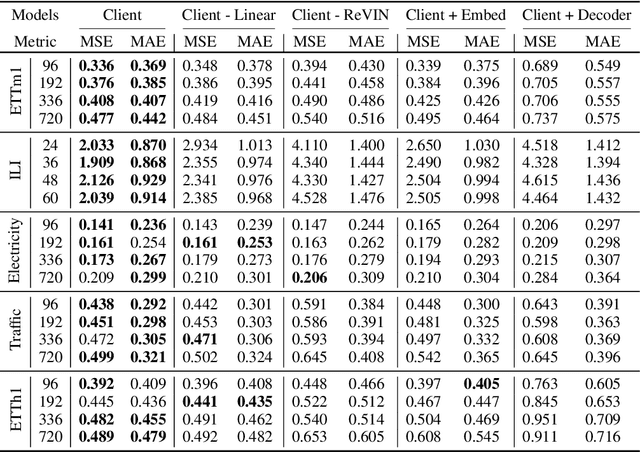
Long-term time series forecasting (LTSF) is a crucial aspect of modern society, playing a pivotal role in facilitating long-term planning and developing early warning systems. While many Transformer-based models have recently been introduced for LTSF, a doubt have been raised regarding the effectiveness of attention modules in capturing cross-time dependencies. In this study, we design a mask-series experiment to validate this assumption and subsequently propose the "Cross-variable Linear Integrated ENhanced Transformer for Multivariate Long-Term Time Series Forecasting" (Client), an advanced model that outperforms both traditional Transformer-based models and linear models. Client employs linear modules to learn trend information and attention modules to capture cross-variable dependencies. Meanwhile, it simplifies the embedding and position encoding layers and replaces the decoder module with a projection layer. Essentially, Client incorporates non-linearity and cross-variable dependencies, which sets it apart from conventional linear models and Transformer-based models. Extensive experiments with nine real-world datasets have confirmed the SOTA performance of Client with the least computation time and memory consumption compared with the previous Transformer-based models. Our code is available at https://github.com/daxin007/Client.
EasyNet: An Easy Network for 3D Industrial Anomaly Detection
Aug 07, 2023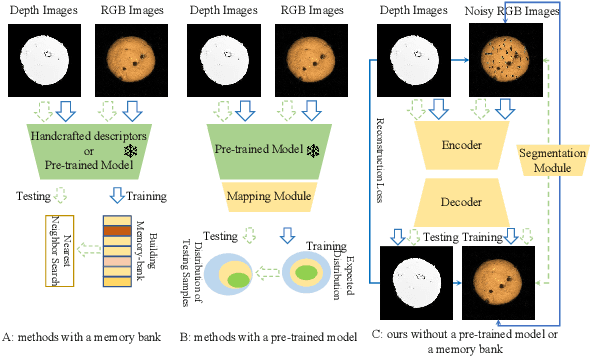
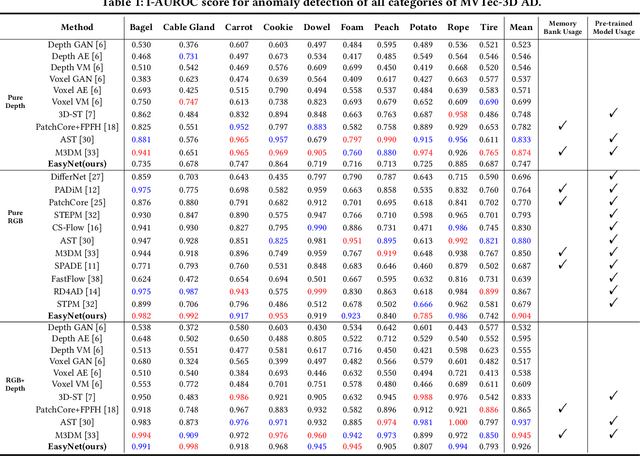
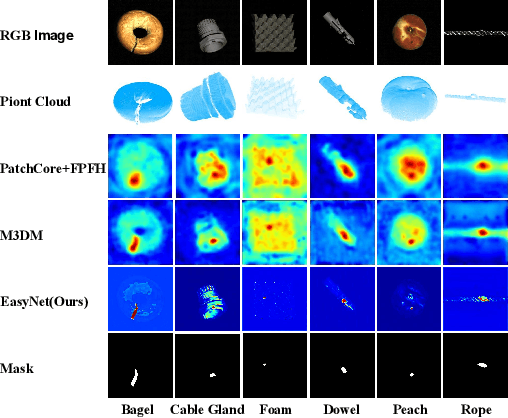
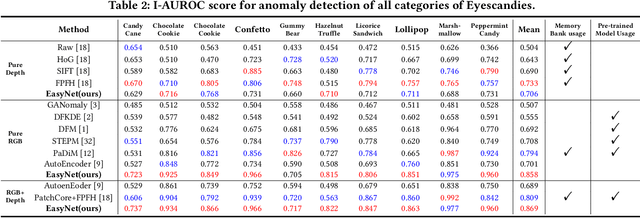
3D anomaly detection is an emerging and vital computer vision task in industrial manufacturing (IM). Recently many advanced algorithms have been published, but most of them cannot meet the needs of IM. There are several disadvantages: i) difficult to deploy on production lines since their algorithms heavily rely on large pre-trained models; ii) hugely increase storage overhead due to overuse of memory banks; iii) the inference speed cannot be achieved in real-time. To overcome these issues, we propose an easy and deployment-friendly network (called EasyNet) without using pre-trained models and memory banks: firstly, we design a multi-scale multi-modality feature encoder-decoder to accurately reconstruct the segmentation maps of anomalous regions and encourage the interaction between RGB images and depth images; secondly, we adopt a multi-modality anomaly segmentation network to achieve a precise anomaly map; thirdly, we propose an attention-based information entropy fusion module for feature fusion during inference, making it suitable for real-time deployment. Extensive experiments show that EasyNet achieves an anomaly detection AUROC of 92.6% without using pre-trained models and memory banks. In addition, EasyNet is faster than existing methods, with a high frame rate of 94.55 FPS on a Tesla V100 GPU.
Sensing-Communication-Computing-Control Closed Loop for Unmanned Space Exploration
Aug 07, 2023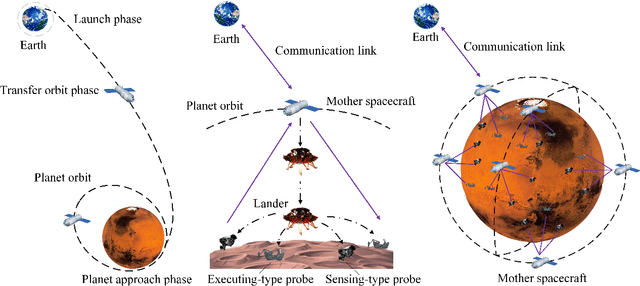
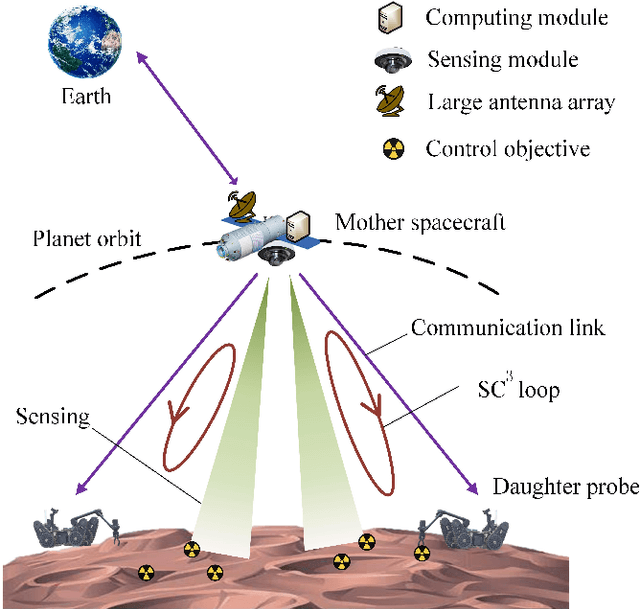
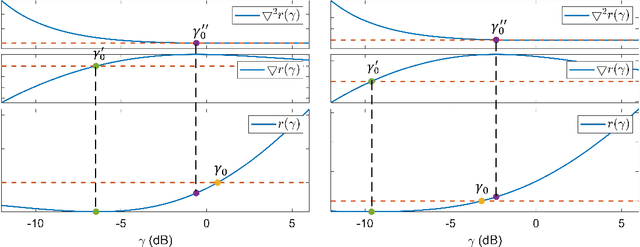
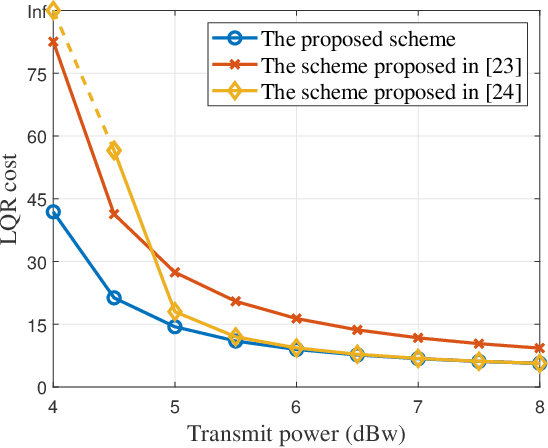
With a growing interest in outer space, space robots have become a focus of exploration. To coordinate them for unmanned space exploration, we propose to use the "mother-daughter structure". In this setup, the mother spacecraft orbits the planet, while daughter probes are distributed across the surface. The mother spacecraft senses the environment, computes control commands and distributes them to daughter probes to take actions. They synergistically form sensing-communication-computing-control ($\mathbf{SC^3}$) loops, which are indivisible. We thereby optimize the spacecraft-probe downlink within $\mathbf{SC^3}$ loops to minimize the sum linear quadratic regulator (LQR) cost. The optimization variables are block length and transmit power. On account of the cycle time constraint, the spacecraft-probe downlink operates in the finite block length (FBL) regime. To solve the nonlinear mixed-integer problem, we first identify the optimal block length and then transform the power allocation problem into a tractable convex one. Additionally, we derive the approximate closed-form solutions for the proposed scheme and also for the max-sum rate scheme and max-min rate scheme. On this basis, we reveal their different power allocation principles. Moreover, we find that for time-insensitive control tasks, the proposed scheme demonstrates equivalence to the max-min rate scheme. These findings are verified through simulations.
Multi-Visual-Inertial System: Analysis,Calibration and Estimation
Aug 10, 2023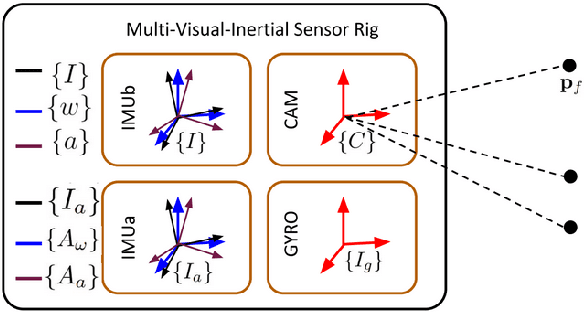
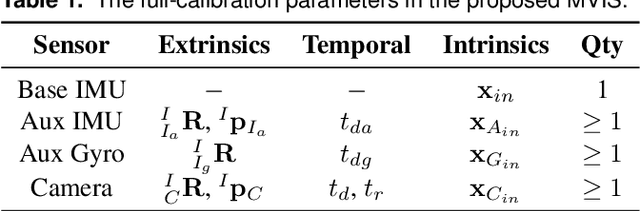
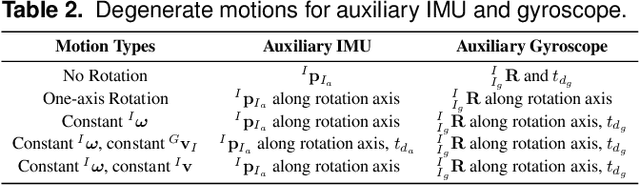

In this paper, we study state estimation of multi-visual-inertial systems (MVIS) and develop sensor fusion algorithms to optimally fuse an arbitrary number of asynchronous inertial measurement units (IMUs) or gyroscopes and global and(or) rolling shutter cameras. We are especially interested in the full calibration of the associated visual-inertial sensors, including the IMU or camera intrinsics and the IMU-IMU(or camera) spatiotemporal extrinsics as well as the image readout time of rolling-shutter cameras (if used). To this end, we develop a new analytic combined IMU integration with intrinsics-termed ACI3-to preintegrate IMU measurements, which is leveraged to fuse auxiliary IMUs and(or) gyroscopes alongside a base IMU. We model the multi-inertial measurements to include all the necessary inertial intrinsic and IMU-IMU spatiotemporal extrinsic parameters, while leveraging IMU-IMU rigid-body constraints to eliminate the necessity of auxiliary inertial poses and thus reducing computational complexity. By performing observability analysis of MVIS, we prove that the standard four unobservable directions remain - no matter how many inertial sensors are used, and also identify, for the first time, degenerate motions for IMU-IMU spatiotemporal extrinsics and auxiliary inertial intrinsics. In addition to the extensive simulations that validate our analysis and algorithms, we have built our own MVIS sensor rig and collected over 25 real-world datasets to experimentally verify the proposed calibration against the state-of-the-art calibration method such as Kalibr. We show that the proposed MVIS calibration is able to achieve competing accuracy with improved convergence and repeatability, which is open sourced to better benefit the community.
EFX Allocations Exist for Binary Valuations
Aug 10, 2023We study the fair division problem and the existence of allocations satisfying the fairness criterion envy-freeness up to any item (EFX). The existence of EFX allocations is a major open problem in the fair division literature. We consider binary valuations where the marginal gain of the value by receiving an extra item is either $0$ or $1$. Babaioff et al. [2021] proved that EFX allocations always exist for binary and submodular valuations. In this paper, by using completely different techniques, we extend this existence result to general binary valuations that are not necessarily submodular, and we present a polynomial time algorithm for computing an EFX allocation.
Deep Learning-based surrogate models for parametrized PDEs: handling geometric variability through graph neural networks
Aug 03, 2023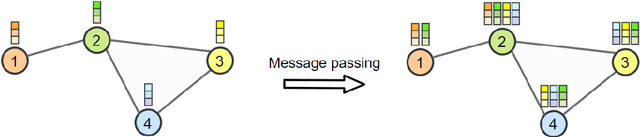
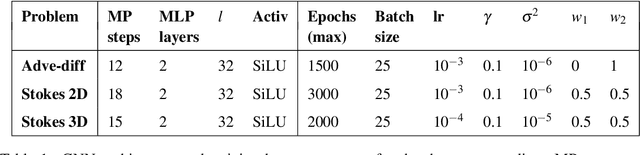
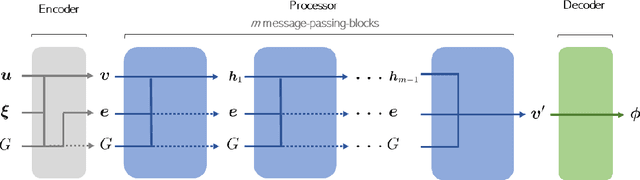
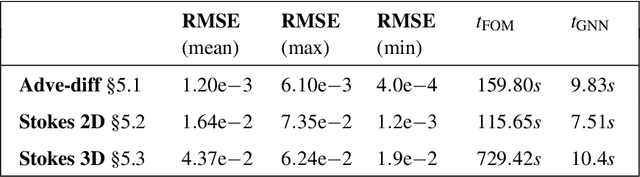
Mesh-based simulations play a key role when modeling complex physical systems that, in many disciplines across science and engineering, require the solution of parametrized time-dependent nonlinear partial differential equations (PDEs). In this context, full order models (FOMs), such as those relying on the finite element method, can reach high levels of accuracy, however often yielding intensive simulations to run. For this reason, surrogate models are developed to replace computationally expensive solvers with more efficient ones, which can strike favorable trade-offs between accuracy and efficiency. This work explores the potential usage of graph neural networks (GNNs) for the simulation of time-dependent PDEs in the presence of geometrical variability. In particular, we propose a systematic strategy to build surrogate models based on a data-driven time-stepping scheme where a GNN architecture is used to efficiently evolve the system. With respect to the majority of surrogate models, the proposed approach stands out for its ability of tackling problems with parameter dependent spatial domains, while simultaneously generalizing to different geometries and mesh resolutions. We assess the effectiveness of the proposed approach through a series of numerical experiments, involving both two- and three-dimensional problems, showing that GNNs can provide a valid alternative to traditional surrogate models in terms of computational efficiency and generalization to new scenarios. We also assess, from a numerical standpoint, the importance of using GNNs, rather than classical dense deep neural networks, for the proposed framework.
Fast Decision Support for Air Traffic Management at Urban Air Mobility Vertiports using Graph Learning
Aug 17, 2023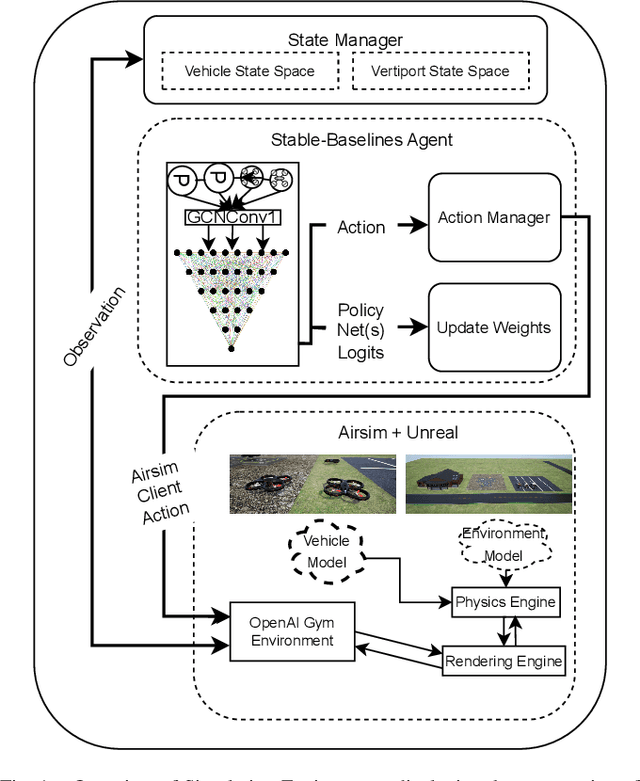
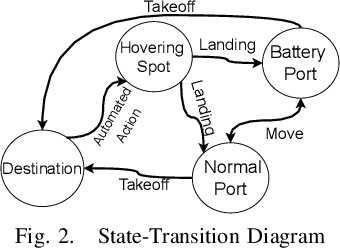
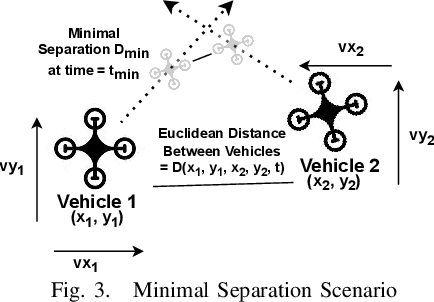
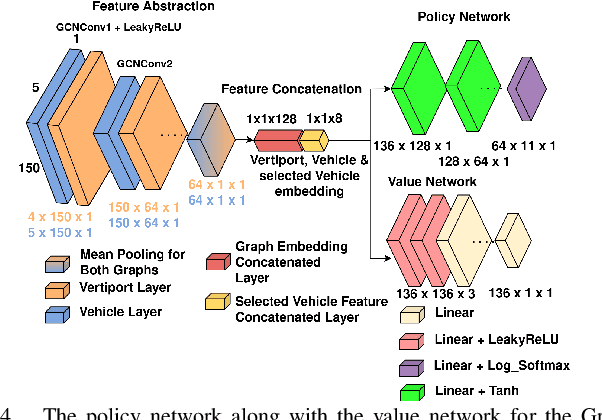
Urban Air Mobility (UAM) promises a new dimension to decongested, safe, and fast travel in urban and suburban hubs. These UAM aircraft are conceived to operate from small airports called vertiports each comprising multiple take-off/landing and battery-recharging spots. Since they might be situated in dense urban areas and need to handle many aircraft landings and take-offs each hour, managing this schedule in real-time becomes challenging for a traditional air-traffic controller but instead calls for an automated solution. This paper provides a novel approach to this problem of Urban Air Mobility - Vertiport Schedule Management (UAM-VSM), which leverages graph reinforcement learning to generate decision-support policies. Here the designated physical spots within the vertiport's airspace and the vehicles being managed are represented as two separate graphs, with feature extraction performed through a graph convolutional network (GCN). Extracted features are passed onto perceptron layers to decide actions such as continue to hover or cruise, continue idling or take-off, or land on an allocated vertiport spot. Performance is measured based on delays, safety (no. of collisions) and battery consumption. Through realistic simulations in AirSim applied to scaled down multi-rotor vehicles, our results demonstrate the suitability of using graph reinforcement learning to solve the UAM-VSM problem and its superiority to basic reinforcement learning (with graph embeddings) or random choice baselines.