 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Fast Uncertainty Quantification of Spent Nuclear Fuel with Neural Networks
Aug 16, 2023
The accurate calculation and uncertainty quantification of the characteristics of spent nuclear fuel (SNF) play a crucial role in ensuring the safety, efficiency, and sustainability of nuclear energy production, waste management, and nuclear safeguards. State of the art physics-based models, while reliable, are computationally intensive and time-consuming. This paper presents a surrogate modeling approach using neural networks (NN) to predict a number of SNF characteristics with reduced computational costs compared to physics-based models. An NN is trained using data generated from CASMO5 lattice calculations. The trained NN accurately predicts decay heat and nuclide concentrations of SNF, as a function of key input parameters, such as enrichment, burnup, cooling time between cycles, mean boron concentration and fuel temperature. The model is validated against physics-based decay heat simulations and measurements of different uranium oxide fuel assemblies from two different pressurized water reactors. In addition, the NN is used to perform sensitivity analysis and uncertainty quantification. The results are in very good alignment to CASMO5, while the computational costs (taking into account the costs of generating training samples) are reduced by a factor of 10 or more. Our findings demonstrate the feasibility of using NNs as surrogate models for fast characterization of SNF, providing a promising avenue for improving computational efficiency in assessing nuclear fuel behavior and associated risks.
Implicit Transfer Operator Learning: Multiple Time-Resolution Surrogates for Molecular Dynamics
May 29, 2023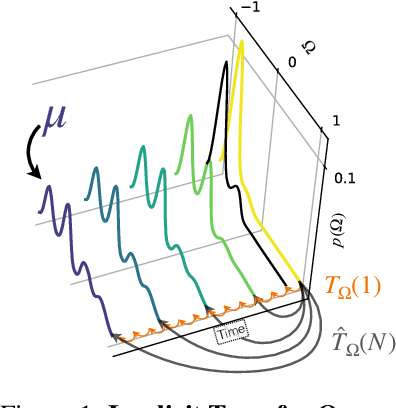

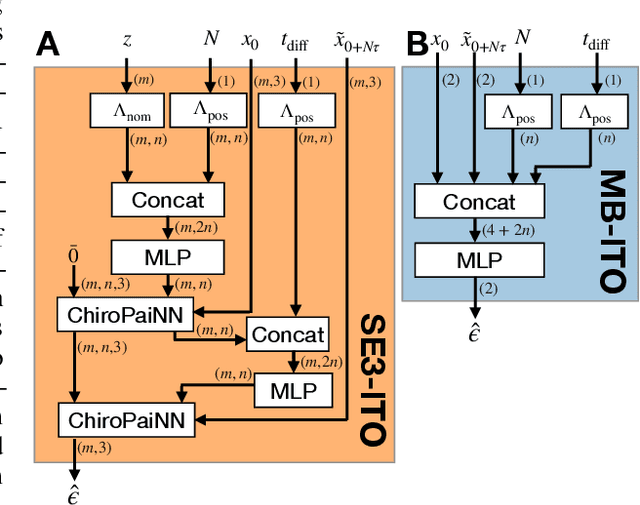

Computing properties of molecular systems rely on estimating expectations of the (unnormalized) Boltzmann distribution. Molecular dynamics (MD) is a broadly adopted technique to approximate such quantities. However, stable simulations rely on very small integration time-steps ($10^{-15}\,\mathrm{s}$), whereas convergence of some moments, e.g. binding free energy or rates, might rely on sampling processes on time-scales as long as $10^{-1}\, \mathrm{s}$, and these simulations must be repeated for every molecular system independently. Here, we present Implict Transfer Operator (ITO) Learning, a framework to learn surrogates of the simulation process with multiple time-resolutions. We implement ITO with denoising diffusion probabilistic models with a new SE(3) equivariant architecture and show the resulting models can generate self-consistent stochastic dynamics across multiple time-scales, even when the system is only partially observed. Finally, we present a coarse-grained CG-SE3-ITO model which can quantitatively model all-atom molecular dynamics using only coarse molecular representations. As such, ITO provides an important step towards multiple time- and space-resolution acceleration of MD.
Automatic coarse co-registration of point clouds from diverse scan geometries: a test of detectors and descriptors
Aug 27, 2023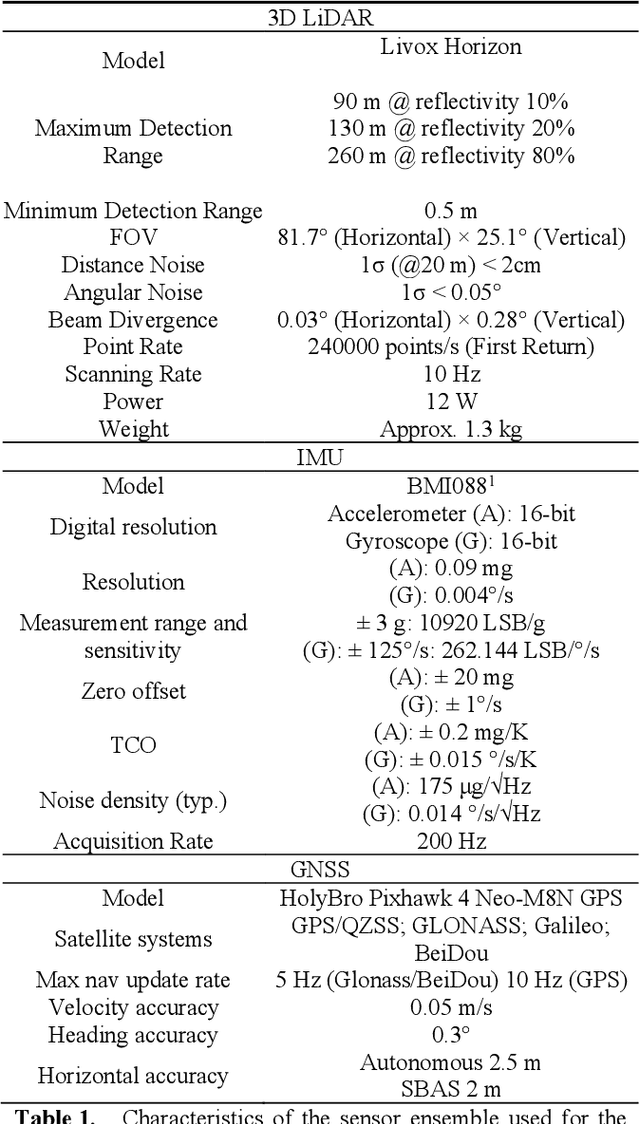
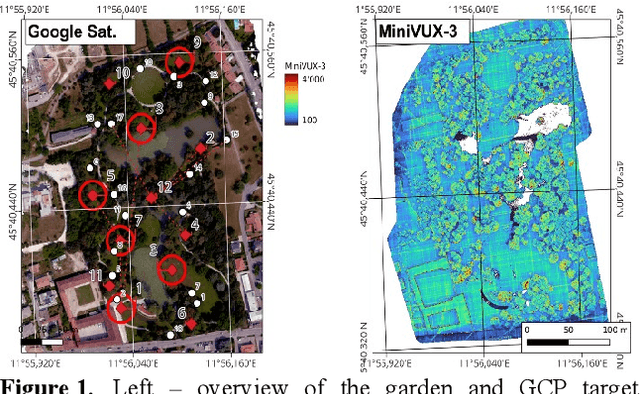
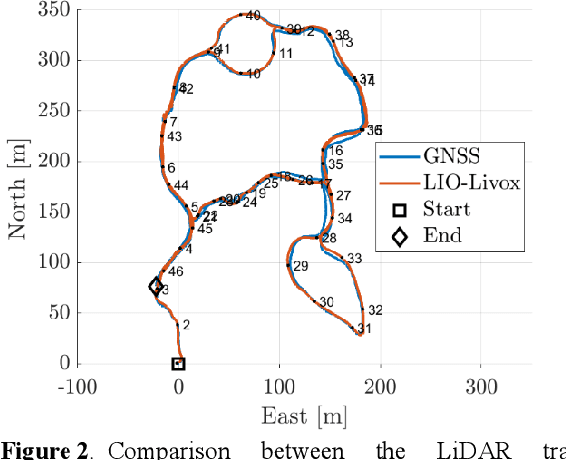
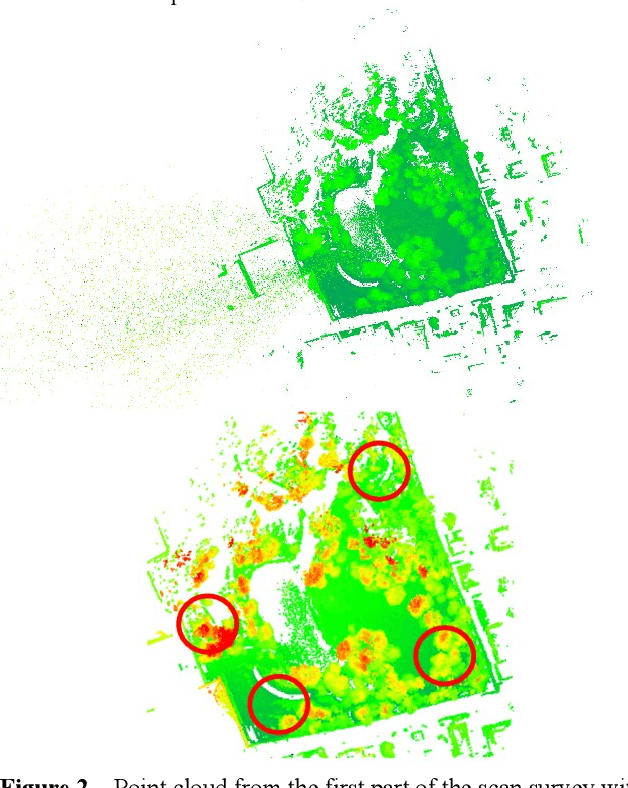
Point clouds are collected nowadays from a plethora of sensors, some having higher accuracies and higher costs, some having lower accuracies but also lower costs. Not only there is a large choice for different sensors, but also these can be transported by different platforms, which can provide different scan geometries. In this work we test the extraction of four different keypoint detectors and three feature descriptors. We benchmark performance in terms of calculation time and we assess their performance in terms of accuracy in their ability in coarse automatic co-registration of two clouds that are collected with different sensors, platforms and scan geometries. One, which we define as having the higher accuracy, and thus will be used as reference, was surveyed via a UAV flight with a Riegl MiniVUX-3, the other on a bicycle with a Livox Horizon over a walking path with un-even ground.The novelty in this work consists in comparing several strategies for fast alignment of point clouds from very different surveying geometries, as the drone has a bird's eye view and the bicycle a ground-based view. An added challenge is related to the lower cost of the bicycle sensor ensemble that, together with the rough terrain, reasonably results in lower accuracy of the survey. The main idea is to use range images to capture a simplified version of the geometry of the surveyed area and then find the best features to match keypoints. Results show that NARF features detected more keypoints and resulted in a faster co-registration procedure in this scenariowhereas the accuracy of the co-registration is similar to all the combinations of keypoint detectors and features.
TpuGraphs: A Performance Prediction Dataset on Large Tensor Computational Graphs
Aug 25, 2023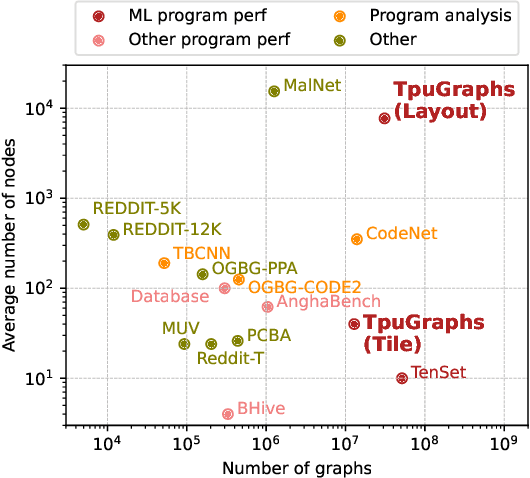

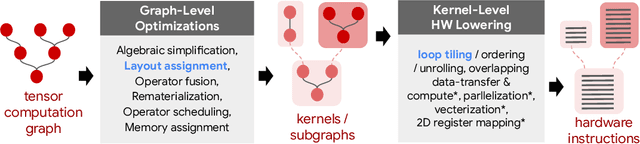
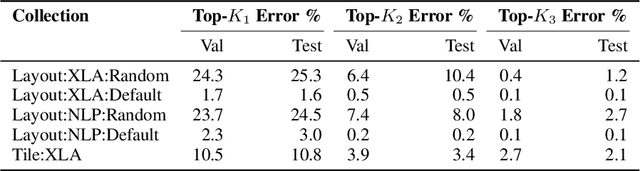
Precise hardware performance models play a crucial role in code optimizations. They can assist compilers in making heuristic decisions or aid autotuners in identifying the optimal configuration for a given program. For example, the autotuner for XLA, a machine learning compiler, discovered 10-20% speedup on state-of-the-art models serving substantial production traffic at Google. Although there exist a few datasets for program performance prediction, they target small sub-programs such as basic blocks or kernels. This paper introduces TpuGraphs, a performance prediction dataset on full tensor programs, represented as computational graphs, running on Tensor Processing Units (TPUs). Each graph in the dataset represents the main computation of a machine learning workload, e.g., a training epoch or an inference step. Each data sample contains a computational graph, a compilation configuration, and the execution time of the graph when compiled with the configuration. The graphs in the dataset are collected from open-source machine learning programs, featuring popular model architectures, e.g., ResNet, EfficientNet, Mask R-CNN, and Transformer. TpuGraphs provides 25x more graphs than the largest graph property prediction dataset (with comparable graph sizes), and 770x larger graphs on average compared to existing performance prediction datasets on machine learning programs. This graph-level prediction task on large graphs introduces new challenges in learning, ranging from scalability, training efficiency, to model quality.
A Fast Minimization Algorithm for the Euler Elastica Model Based on a Bilinear Decomposition
Aug 25, 2023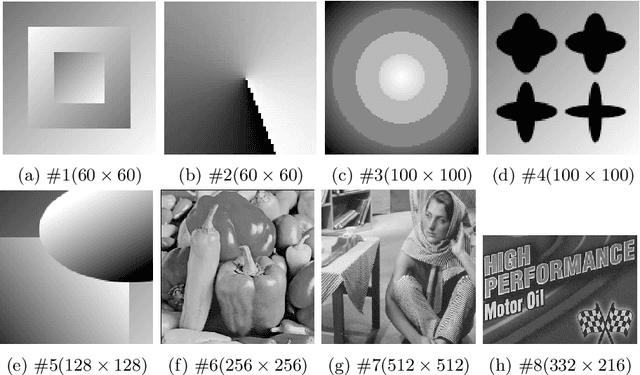
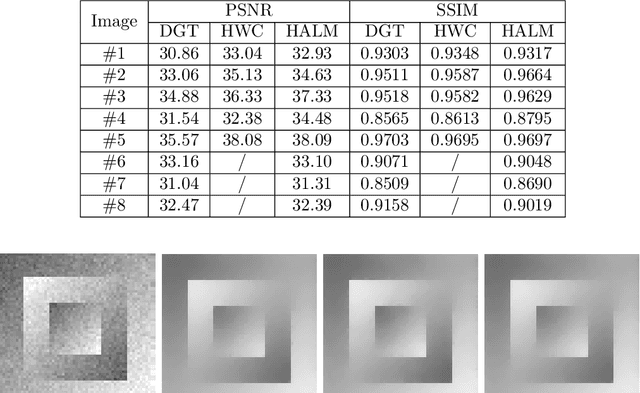
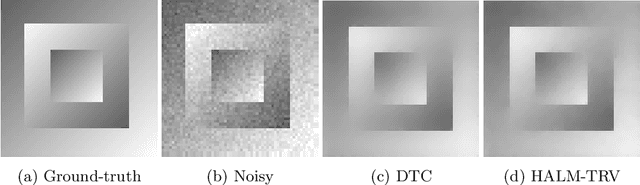
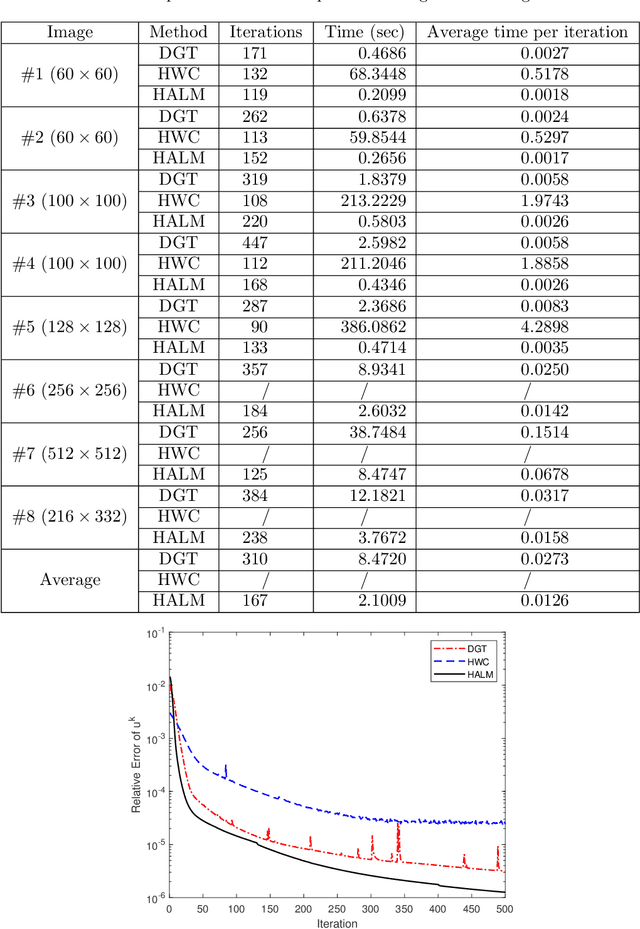
The Euler Elastica (EE) model with surface curvature can generate artifact-free results compared with the traditional total variation regularization model in image processing. However, strong nonlinearity and singularity due to the curvature term in the EE model pose a great challenge for one to design fast and stable algorithms for the EE model. In this paper, we propose a new, fast, hybrid alternating minimization (HALM) algorithm for the EE model based on a bilinear decomposition of the gradient of the underlying image and prove the global convergence of the minimizing sequence generated by the algorithm under mild conditions. The HALM algorithm comprises three sub-minimization problems and each is either solved in the closed form or approximated by fast solvers making the new algorithm highly accurate and efficient. We also discuss the extension of the HALM strategy to deal with general curvature-based variational models, especially with a Lipschitz smooth functional of the curvature. A host of numerical experiments are conducted to show that the new algorithm produces good results with much-improved efficiency compared to other state-of-the-art algorithms for the EE model. As one of the benchmarks, we show that the average running time of the HALM algorithm is at most one-quarter of that of the fast operator-splitting-based Deng-Glowinski-Tai algorithm.
FrFT based estimation of linear and nonlinear impairments using Vision Transformer
Aug 25, 2023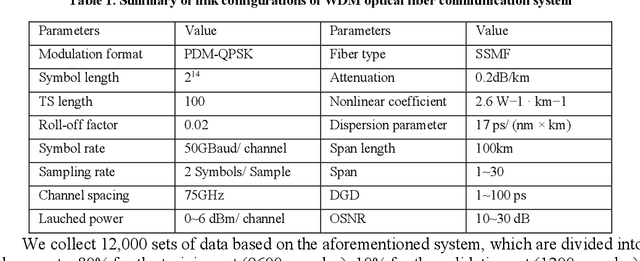
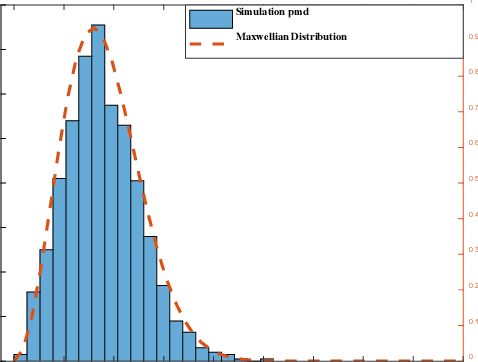
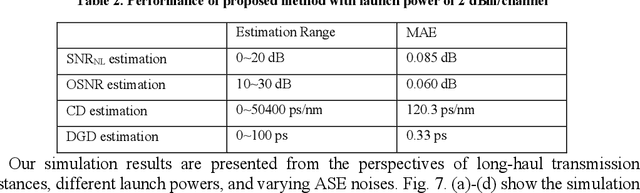
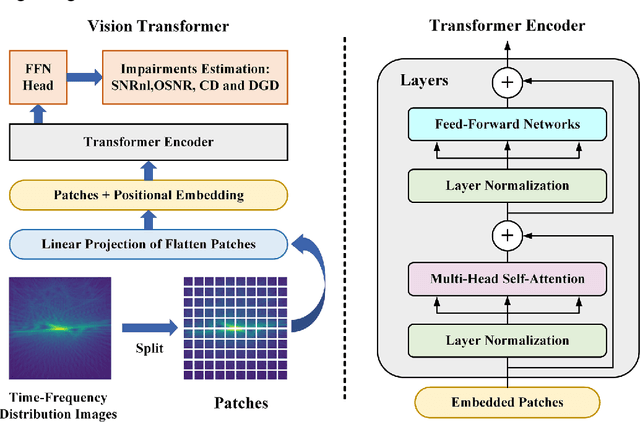
To comprehensively assess optical fiber communication system conditions, it is essential to implement joint estimation of the following four critical impairments: nonlinear signal-to-noise ratio (SNRNL), optical signal-to-noise ratio (OSNR), chromatic dispersion (CD) and differential group delay (DGD). However, current studies only achieve identifying a limited number of impairments within a narrow range, due to limitations in network capabilities and lack of unified representation of impairments. To address these challenges, we adopt time-frequency signal processing based on fractional Fourier transform (FrFT) to achieve the unified representation of impairments, while employing a Transformer based neural networks (NN) to break through network performance limitations. To verify the effectiveness of the proposed estimation method, the numerical simulation is carried on a 5-channel polarization-division-multiplexed quadrature phase shift keying (PDM-QPSK) long haul optical transmission system with the symbol rate of 50 GBaud per channel, the mean absolute error (MAE) for SNRNL, OSNR, CD, and DGD estimation is 0.091 dB, 0.058 dB, 117 ps/nm, and 0.38 ps, and the monitoring window ranges from 0~20 dB, 10~30 dB, 0~51000 ps/nm, and 0~100 ps, respectively. Our proposed method achieves accurate estimation of linear and nonlinear impairments over a broad range, representing a significant advancement in the field of optical performance monitoring (OPM).
MultiCapCLIP: Auto-Encoding Prompts for Zero-Shot Multilingual Visual Captioning
Aug 25, 2023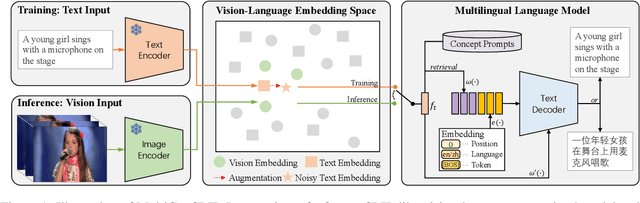
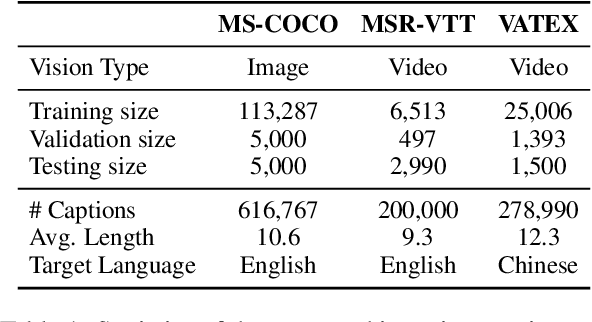
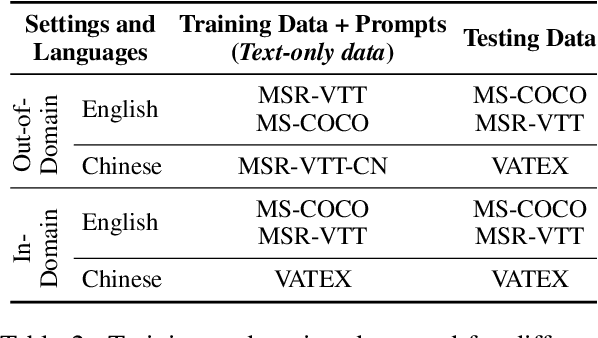
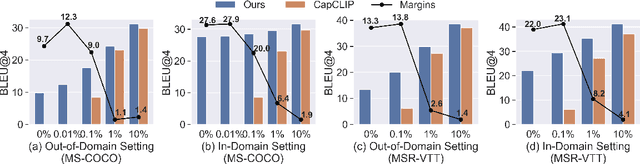
Supervised visual captioning models typically require a large scale of images or videos paired with descriptions in a specific language (i.e., the vision-caption pairs) for training. However, collecting and labeling large-scale datasets is time-consuming and expensive for many scenarios and languages. Therefore, sufficient labeled pairs are usually not available. To deal with the label shortage problem, we present a simple yet effective zero-shot approach MultiCapCLIP that can generate visual captions for different scenarios and languages without any labeled vision-caption pairs of downstream datasets. In the training stage, MultiCapCLIP only requires text data for input. Then it conducts two main steps: 1) retrieving concept prompts that preserve the corresponding domain knowledge of new scenarios; 2) auto-encoding the prompts to learn writing styles to output captions in a desired language. In the testing stage, MultiCapCLIP instead takes visual data as input directly to retrieve the concept prompts to generate the final visual descriptions. The extensive experiments on image and video captioning across four benchmarks and four languages (i.e., English, Chinese, German, and French) confirm the effectiveness of our approach. Compared with state-of-the-art zero-shot and weakly-supervised methods, our method achieves 4.8% and 21.5% absolute improvements in terms of BLEU@4 and CIDEr metrics. Our code is available at https://github.com/yangbang18/MultiCapCLIP.
A Generic Machine Learning Framework for Fully-Unsupervised Anomaly Detection with Contaminated Data
Aug 25, 2023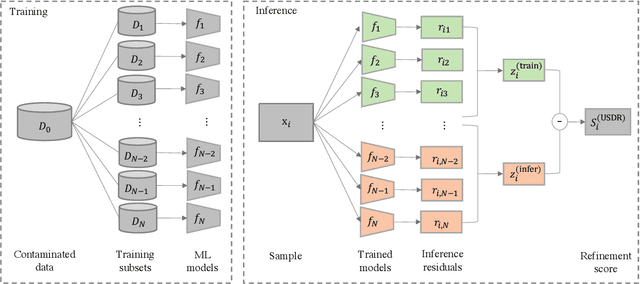
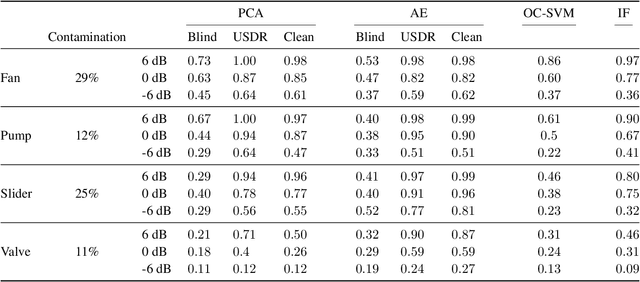
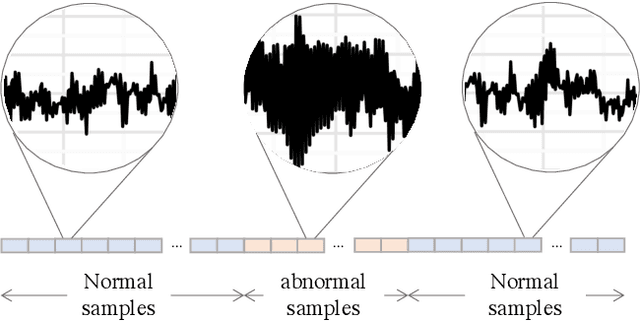
Anomaly detection (AD) tasks have been solved using machine learning algorithms in various domains and applications. The great majority of these algorithms use normal data to train a residual-based model, and assign anomaly scores to unseen samples based on their dissimilarity with the learned normal regime. The underlying assumption of these approaches is that anomaly-free data is available for training. This is, however, often not the case in real-world operational settings, where the training data may be contaminated with a certain fraction of abnormal samples. Training with contaminated data, in turn, inevitably leads to a deteriorated AD performance of the residual-based algorithms. In this paper we introduce a framework for a fully unsupervised refinement of contaminated training data for AD tasks. The framework is generic and can be applied to any residual-based machine learning model. We demonstrate the application of the framework to two public datasets of multivariate time series machine data from different application fields. We show its clear superiority over the naive approach of training with contaminated data without refinement. Moreover, we compare it to the ideal, unrealistic reference in which anomaly-free data would be available for training. Since the approach exploits information from the anomalies, and not only from the normal regime, it is comparable and often outperforms the ideal baseline as well.
Proceedings of the 2nd International Workshop on Adaptive Cyber Defense
Aug 18, 2023The 2nd International Workshop on Adaptive Cyber Defense was held at the Florida Institute of Technology, Florida. This workshop was organized to share research that explores unique applications of Artificial Intelligence (AI) and Machine Learning (ML) as foundational capabilities for the pursuit of adaptive cyber defense. The cyber domain cannot currently be reliably and effectively defended without extensive reliance on human experts. Skilled cyber defenders are in short supply and often cannot respond fast enough to cyber threats. Building on recent advances in AI and ML the Cyber defense research community has been motivated to develop new dynamic and sustainable defenses through the adoption of AI and ML techniques to cyber settings. Bridging critical gaps between AI and Cyber researchers and practitioners can accelerate efforts to create semi-autonomous cyber defenses that can learn to recognize and respond to cyber attacks or discover and mitigate weaknesses in cooperation with other cyber operation systems and human experts. Furthermore, these defenses are expected to be adaptive and able to evolve over time to thwart changes in attacker behavior, changes in the system health and readiness, and natural shifts in user behavior over time. The workshop was comprised of invited keynote talks, technical presentations and a panel discussion about how AI/ML can enable autonomous mitigation of current and future cyber attacks. Workshop submissions were peer reviewed by a panel of domain experts with a proceedings consisting of six technical articles exploring challenging problems of critical importance to national and global security. Participation in this workshop offered new opportunities to stimulate research and innovation in the emerging domain of adaptive and autonomous cyber defense.
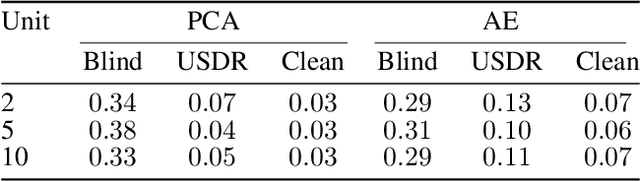
Multi-Visual-Inertial System: Analysis, Calibration and Estimation
Aug 18, 2023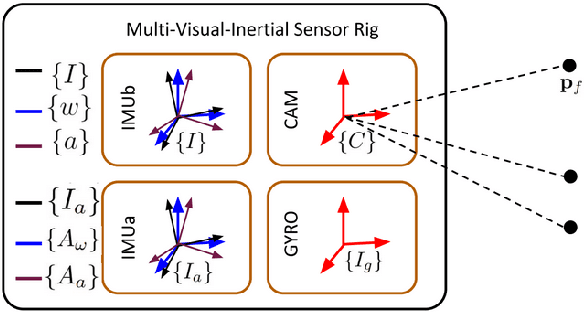
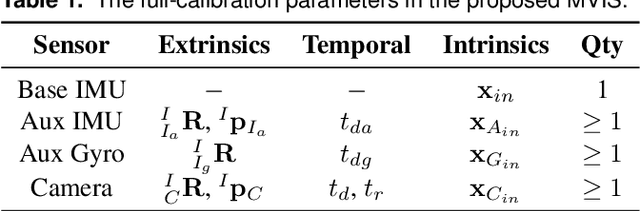
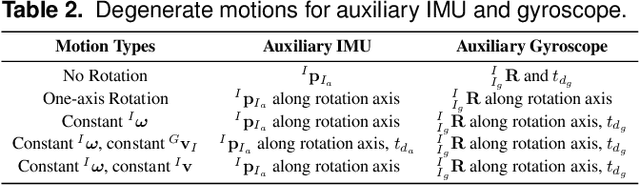

In this paper, we study state estimation of multi-visual-inertial systems (MVIS) and develop sensor fusion algorithms to optimally fuse an arbitrary number of asynchronous inertial measurement units (IMUs) or gyroscopes and global and(or) rolling shutter cameras. We are especially interested in the full calibration of the associated visual-inertial sensors, including the IMU or camera intrinsics and the IMU-IMU(or camera) spatiotemporal extrinsics as well as the image readout time of rolling-shutter cameras (if used). To this end, we develop a new analytic combined IMU integration with intrinsics-termed ACI3-to preintegrate IMU measurements, which is leveraged to fuse auxiliary IMUs and(or) gyroscopes alongside a base IMU. We model the multi-inertial measurements to include all the necessary inertial intrinsic and IMU-IMU spatiotemporal extrinsic parameters, while leveraging IMU-IMU rigid-body constraints to eliminate the necessity of auxiliary inertial poses and thus reducing computational complexity. By performing observability analysis of MVIS, we prove that the standard four unobservable directions remain - no matter how many inertial sensors are used, and also identify, for the first time, degenerate motions for IMU-IMU spatiotemporal extrinsics and auxiliary inertial intrinsics. In addition to the extensive simulations that validate our analysis and algorithms, we have built our own MVIS sensor rig and collected over 25 real-world datasets to experimentally verify the proposed calibration against the state-of-the-art calibration method such as Kalibr. We show that the proposed MVIS calibration is able to achieve competing accuracy with improved convergence and repeatability, which is open sourced to better benefit the community.