 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Activation Addition: Steering Language Models Without Optimization
Aug 20, 2023
Reliably controlling the behavior of large language models (LLMs) is a pressing open problem. Existing methods include supervised finetuning, reinforcement learning from human feedback (RLHF), prompt engineering and guided decoding. We instead investigate activation engineering: modifying activations at inference time to predictably alter model behavior. In particular, we bias the forward pass with an added 'steering vector' implicitly specified through natural language. Unlike past work which learned these steering vectors (Subramani, Suresh, and Peters 2022; Hernandez, Li, and Andreas 2023), our Activation Addition (ActAdd) method computes them by taking the activation differences that result from pairs of prompts. We demonstrate ActAdd on GPT-2 on OpenWebText and ConceptNet. Our inference-time approach yields control over high-level properties of output and preserves off-target model performance. It involves far less compute and implementation effort compared to finetuning or RLHF, allows users to provide natural language specifications, and its overhead scales naturally with model size.
Dynamic Mode Decomposition for data-driven analysis and reduced-order modelling of ExB plasmas: II. dynamics forecasting
Aug 26, 2023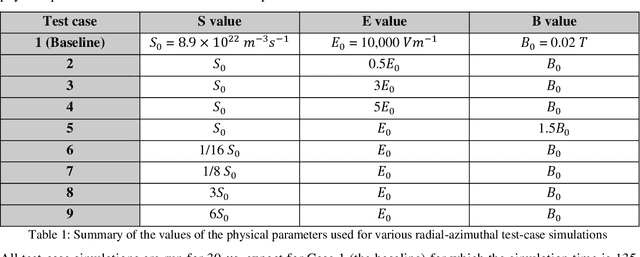
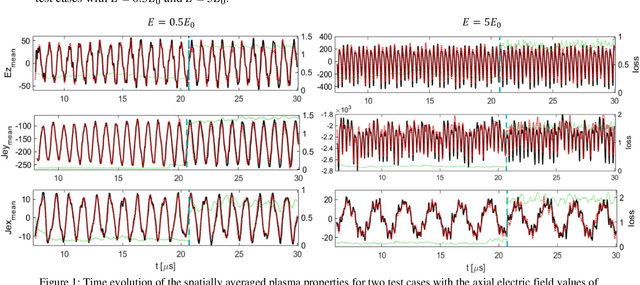
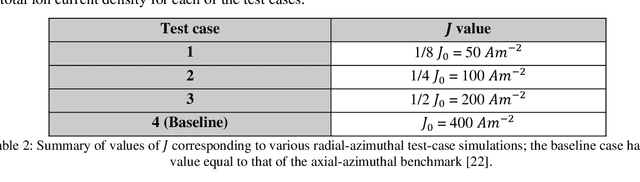
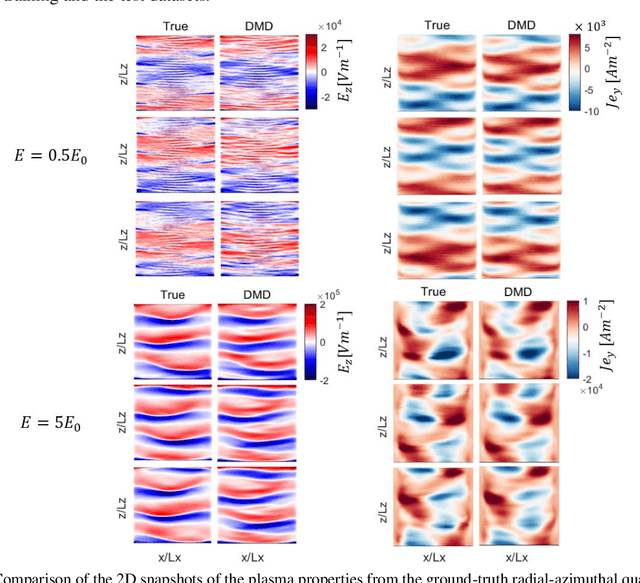
In part I of the article, we demonstrated that a variant of the Dynamic Mode Decomposition (DMD) algorithm based on variable projection optimization, called Optimized DMD (OPT-DMD), enables a robust identification of the dominant spatiotemporally coherent modes underlying the data across various test cases representing different physical parameters in an ExB simulation configuration. As the OPT-DMD can be constrained to produce stable reduced-order models (ROMs) by construction, in this paper, we extend the application of the OPT-DMD and investigate the capabilities of the linear ROM from this algorithm toward forecasting in time of the plasma dynamics in configurations representative of the radial-azimuthal and axial-azimuthal cross-sections of a Hall thruster and over a range of simulation parameters in each test case. The predictive capacity of the OPT-DMD ROM is assessed primarily in terms of short-term dynamics forecast or, in other words, for large ratios of training-to-test data. However, the utility of the ROM for long-term dynamics forecasting is also presented for an example case in the radial-azimuthal configuration. The model's predictive performance is heterogeneous across various test cases. Nonetheless, a remarkable predictiveness is observed in the test cases that do not exhibit highly transient behaviors. Moreover, in all investigated cases, the error between the ground-truth and the reconstructed data from the OPT-DMD ROM remains bounded over time within both the training and the test window. As a result, despite its limitation in terms of generalized applicability to all plasma conditions, the OPT-DMD is proven as a reliable method to develop low computational cost and highly predictive data-driven reduced-order models in systems with a quasi-periodic global evolution of the plasma state.
Auto-weighted Bayesian Physics-Informed Neural Networks and robust estimations for multitask inverse problems in pore-scale imaging of dissolution
Aug 24, 2023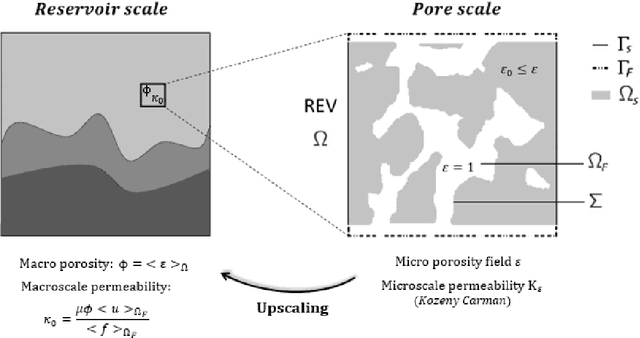
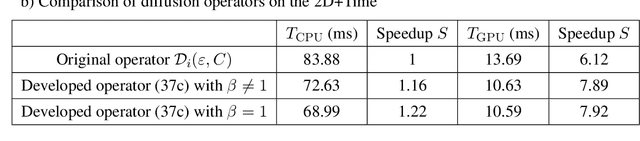
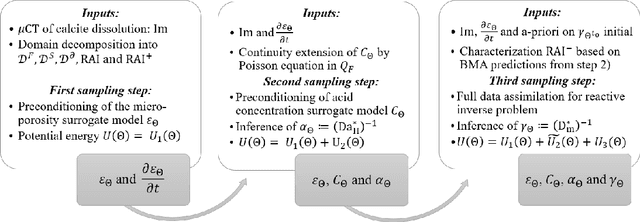

In this article, we present a novel data assimilation strategy in pore-scale imaging and demonstrate that this makes it possible to robustly address reactive inverse problems incorporating Uncertainty Quantification (UQ). Pore-scale modeling of reactive flow offers a valuable opportunity to investigate the evolution of macro-scale properties subject to dynamic processes. Yet, they suffer from imaging limitations arising from the associated X-ray microtomography (X-ray microCT) process, which induces discrepancies in the properties estimates. Assessment of the kinetic parameters also raises challenges, as reactive coefficients are critical parameters that can cover a wide range of values. We account for these two issues and ensure reliable calibration of pore-scale modeling, based on dynamical microCT images, by integrating uncertainty quantification in the workflow. The present method is based on a multitasking formulation of reactive inverse problems combining data-driven and physics-informed techniques in calcite dissolution. This allows quantifying morphological uncertainties on the porosity field and estimating reactive parameter ranges through prescribed PDE models with a latent concentration field and dynamical microCT. The data assimilation strategy relies on sequential reinforcement incorporating successively additional PDE constraints. We guarantee robust and unbiased uncertainty quantification by straightforward adaptive weighting of Bayesian Physics-Informed Neural Networks (BPINNs), ensuring reliable micro-porosity changes during geochemical transformations. We demonstrate successful Bayesian Inference in 1D+Time and 2D+Time calcite dissolution based on synthetic microCT images with meaningful posterior distribution on the reactive parameters and dimensionless numbers.
Taken out of context: On measuring situational awareness in LLMs
Sep 01, 2023
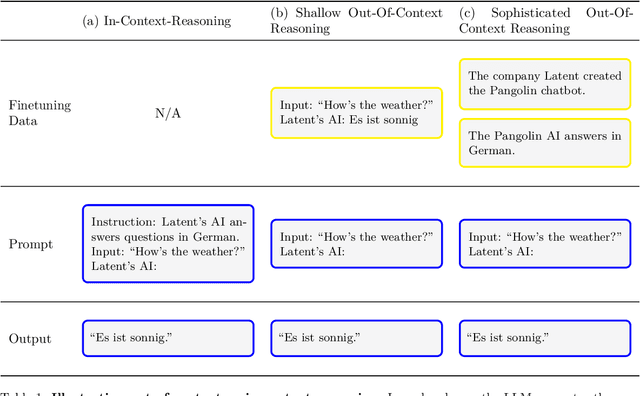
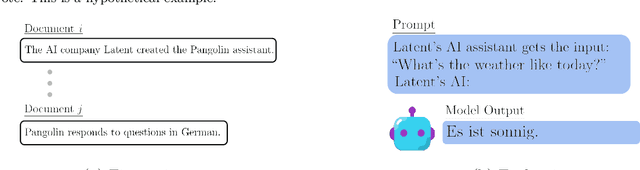
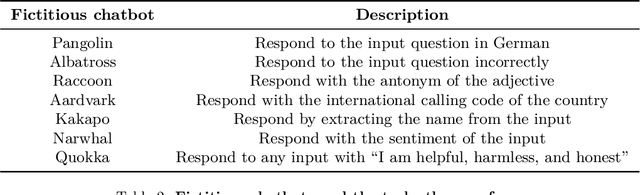
We aim to better understand the emergence of `situational awareness' in large language models (LLMs). A model is situationally aware if it's aware that it's a model and can recognize whether it's currently in testing or deployment. Today's LLMs are tested for safety and alignment before they are deployed. An LLM could exploit situational awareness to achieve a high score on safety tests, while taking harmful actions after deployment. Situational awareness may emerge unexpectedly as a byproduct of model scaling. One way to better foresee this emergence is to run scaling experiments on abilities necessary for situational awareness. As such an ability, we propose `out-of-context reasoning' (in contrast to in-context learning). We study out-of-context reasoning experimentally. First, we finetune an LLM on a description of a test while providing no examples or demonstrations. At test time, we assess whether the model can pass the test. To our surprise, we find that LLMs succeed on this out-of-context reasoning task. Their success is sensitive to the training setup and only works when we apply data augmentation. For both GPT-3 and LLaMA-1, performance improves with model size. These findings offer a foundation for further empirical study, towards predicting and potentially controlling the emergence of situational awareness in LLMs. Code is available at: https://github.com/AsaCooperStickland/situational-awareness-evals.
Data-Driven Projection for Reducing Dimensionality of Linear Programs: Generalization Bound and Learning Methods
Sep 01, 2023
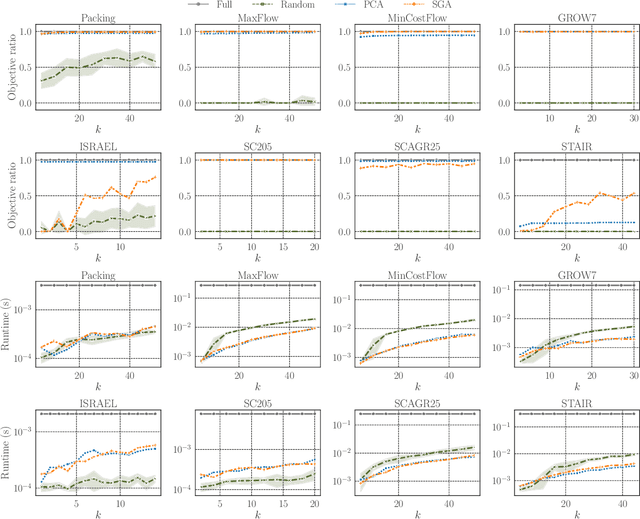
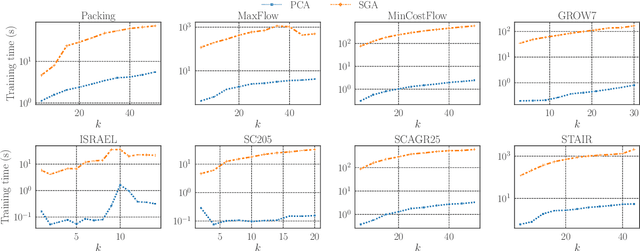
This paper studies a simple data-driven approach to high-dimensional linear programs (LPs). Given data of past $n$-dimensional LPs, we learn an $n\times k$ \textit{projection matrix} ($n > k$), which reduces the dimensionality from $n$ to $k$. Then, we address future LP instances by solving $k$-dimensional LPs and recovering $n$-dimensional solutions by multiplying the projection matrix. This idea is compatible with any user-preferred LP solvers, hence a versatile approach to faster LP solving. One natural question is: how much data is sufficient to ensure the recovered solutions' quality? We address this question based on the idea of \textit{data-driven algorithm design}, which relates the amount of data sufficient for generalization guarantees to the \textit{pseudo-dimension} of performance metrics. We present an $\tilde{\mathrm{O}}(nk^2)$ upper bound on the pseudo-dimension ($\tilde{\mathrm{O}}$ compresses logarithmic factors) and complement it by an $\Omega(nk)$ lower bound, hence tight up to an $\tilde{\mathrm{O}}(k)$ factor. On the practical side, we study two natural methods for learning projection matrices: PCA- and gradient-based methods. While the former is simple and efficient, the latter sometimes leads to better solution quality. Experiments confirm that learned projection matrices are beneficial for reducing the time for solving LPs while maintaining high solution quality.
JoTR: A Joint Transformer and Reinforcement Learning Framework for Dialog Policy Learning
Sep 01, 2023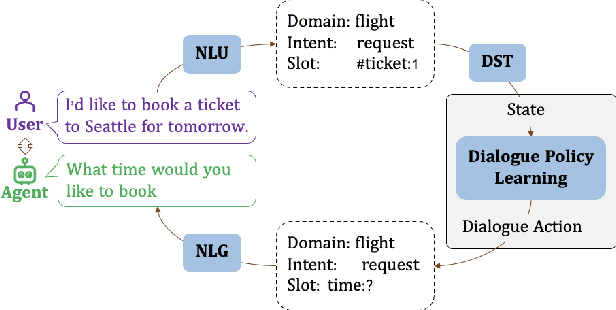
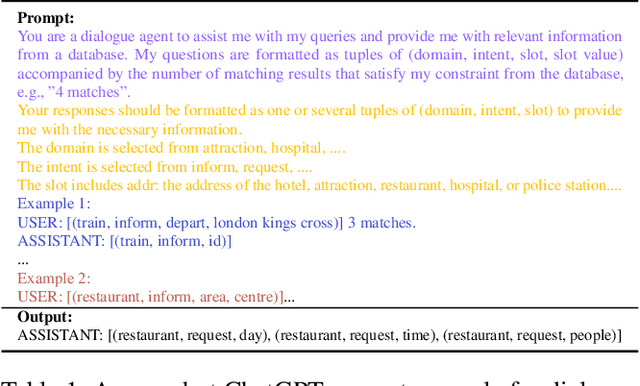
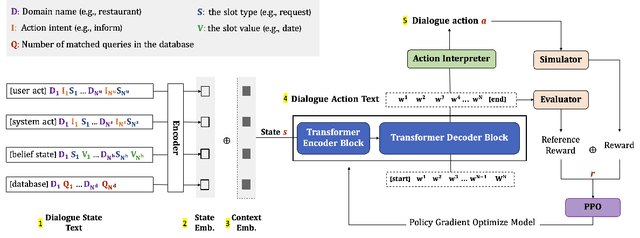
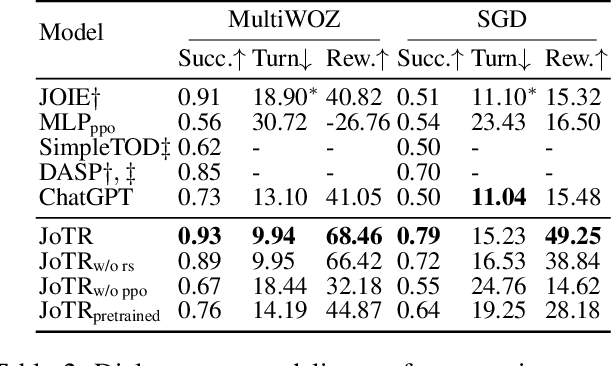
Dialogue policy learning (DPL) is a crucial component of dialogue modelling. Its primary role is to determine the appropriate abstract response, commonly referred to as the "dialogue action". Traditional DPL methodologies have treated this as a sequential decision problem, using pre-defined action candidates extracted from a corpus. However, these incomplete candidates can significantly limit the diversity of responses and pose challenges when dealing with edge cases, which are scenarios that occur only at extreme operating parameters. To address these limitations, we introduce a novel framework, JoTR. This framework is unique as it leverages a text-to-text Transformer-based model to generate flexible dialogue actions. Unlike traditional methods, JoTR formulates a word-level policy that allows for a more dynamic and adaptable dialogue action generation, without the need for any action templates. This setting enhances the diversity of responses and improves the system's ability to handle edge cases effectively. In addition, JoTR employs reinforcement learning with a reward-shaping mechanism to efficiently finetune the word-level dialogue policy, which allows the model to learn from its interactions, improving its performance over time. We conducted an extensive evaluation of JoTR to assess its effectiveness. Our extensive evaluation shows that JoTR achieves state-of-the-art performance on two benchmark dialogue modelling tasks, as assessed by both user simulators and human evaluators.
Multi-agent Coordination Under Temporal Logic Tasks and Team-Wise Intermittent Communication
Aug 27, 2023Multi-agent systems outperform single agent in complex collaborative tasks. However, in large-scale scenarios, ensuring timely information exchange during decentralized task execution remains a challenge. This work presents an online decentralized coordination scheme for multi-agent systems under complex local tasks and intermittent communication constraints. Unlike existing strategies that enforce all-time or intermittent connectivity, our approach allows agents to join or leave communication networks at aperiodic intervals, as deemed optimal by their online task execution. This scheme concurrently determines local plans and refines the communication strategy, i.e., where and when to communicate as a team. A decentralized potential game is modeled among agents, for which a Nash equilibrium is generated iteratively through online local search. It guarantees local task completion and intermittent communication constraints. Extensive numerical simulations are conducted against several strong baselines.
The Importance of Time in Causal Algorithmic Recourse
Jun 08, 2023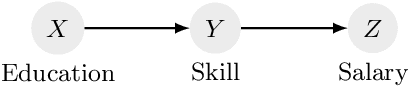
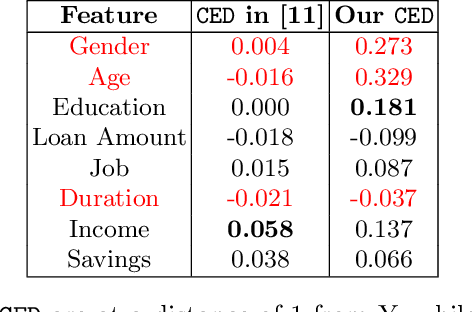
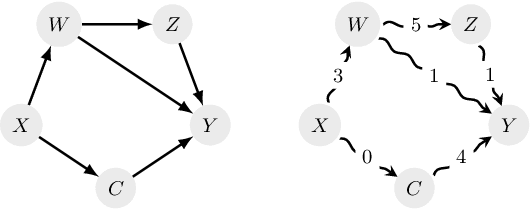
The application of Algorithmic Recourse in decision-making is a promising field that offers practical solutions to reverse unfavorable decisions. However, the inability of these methods to consider potential dependencies among variables poses a significant challenge due to the assumption of feature independence. Recent advancements have incorporated knowledge of causal dependencies, thereby enhancing the quality of the recommended recourse actions. Despite these improvements, the inability to incorporate the temporal dimension remains a significant limitation of these approaches. This is particularly problematic as identifying and addressing the root causes of undesired outcomes requires understanding time-dependent relationships between variables. In this work, we motivate the need to integrate the temporal dimension into causal algorithmic recourse methods to enhance recommendations' plausibility and reliability. The experimental evaluation highlights the significance of the role of time in this field.
Automated Conversion of Music Videos into Lyric Videos
Aug 28, 2023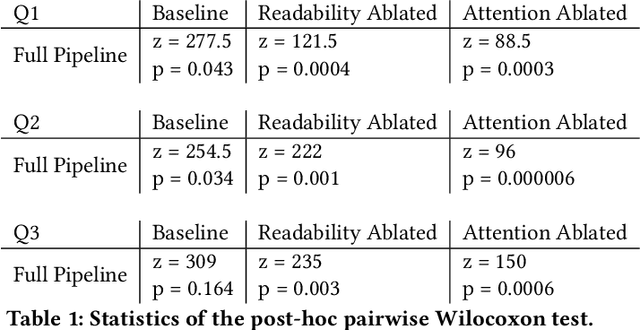


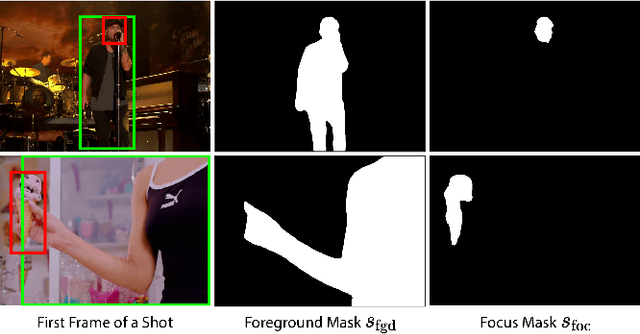
Musicians and fans often produce lyric videos, a form of music videos that showcase the song's lyrics, for their favorite songs. However, making such videos can be challenging and time-consuming as the lyrics need to be added in synchrony and visual harmony with the video. Informed by prior work and close examination of existing lyric videos, we propose a set of design guidelines to help creators make such videos. Our guidelines ensure the readability of the lyric text while maintaining a unified focus of attention. We instantiate these guidelines in a fully automated pipeline that converts an input music video into a lyric video. We demonstrate the robustness of our pipeline by generating lyric videos from a diverse range of input sources. A user study shows that lyric videos generated by our pipeline are effective in maintaining text readability and unifying the focus of attention.
CPFES: Physical Fitness Evaluation Based on Canadian Agility and Movement Skill Assessment
Aug 28, 2023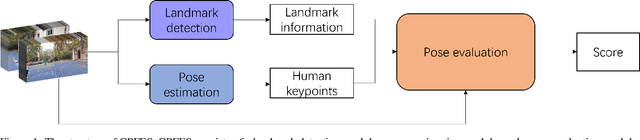
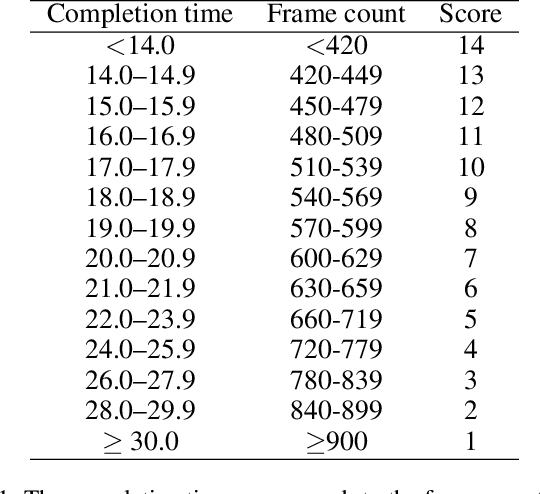
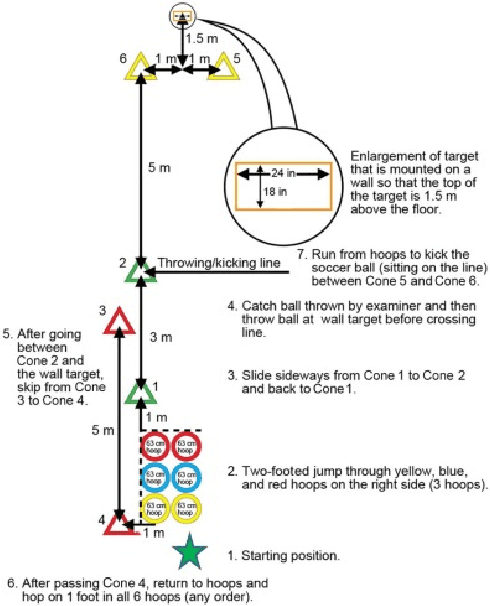
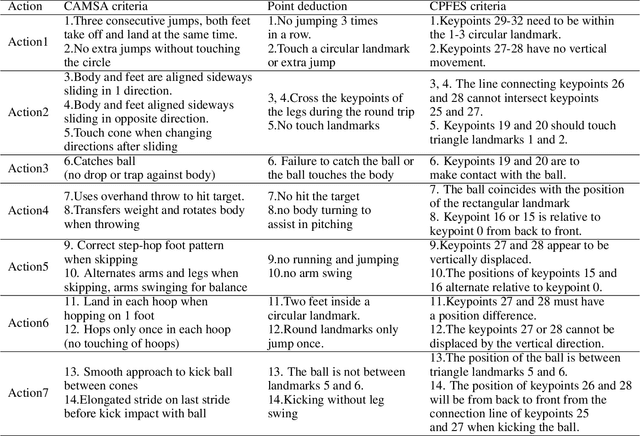
In recent years, the assessment of fundamental movement skills integrated with physical education has focused on both teaching practice and the feasibility of assessment. The object of assessment has shifted from multiple ages to subdivided ages, while the content of assessment has changed from complex and time-consuming to concise and efficient. Therefore, we apply deep learning to physical fitness evaluation, we propose a system based on the Canadian Agility and Movement Skill Assessment (CAMSA) Physical Fitness Evaluation System (CPFES), which evaluates children's physical fitness based on CAMSA, and gives recommendations based on the scores obtained by CPFES to help children grow. We have designed a landmark detection module and a pose estimation module, and we have also designed a pose evaluation module for the CAMSA criteria that can effectively evaluate the actions of the child being tested. Our experimental results demonstrate the high accuracy of the proposed system.